


Intelligenter Separator, der trockenen und nassen Abfall trennt
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Notwendige Werkzeuge und Maschinen
 |
| |||
 |
|
Apps und Onlinedienste
 |
|
Über dieses Projekt
Beschreibung: Dieser Separator kann Trockenmüll und Nassmüll erfolgreich trennen.
Hinweis: Es kann weder Plastik noch Metall trennen. Dafür müssen Sie zusätzliche Sensoren und Module verwenden
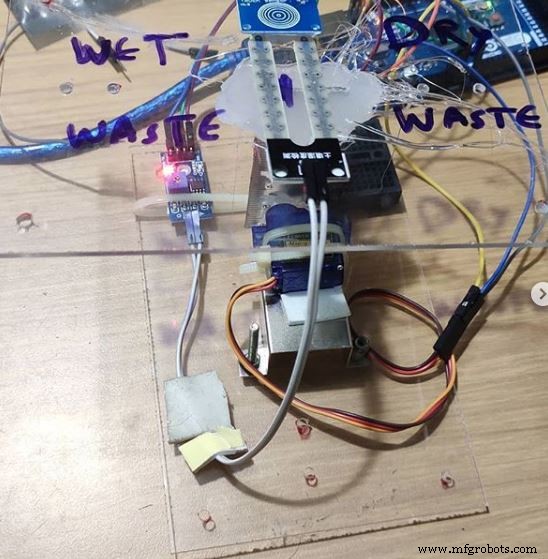
Konstruktion:
1. Ich habe 2 Acrylplatten als Körper meines Segregators verwendet
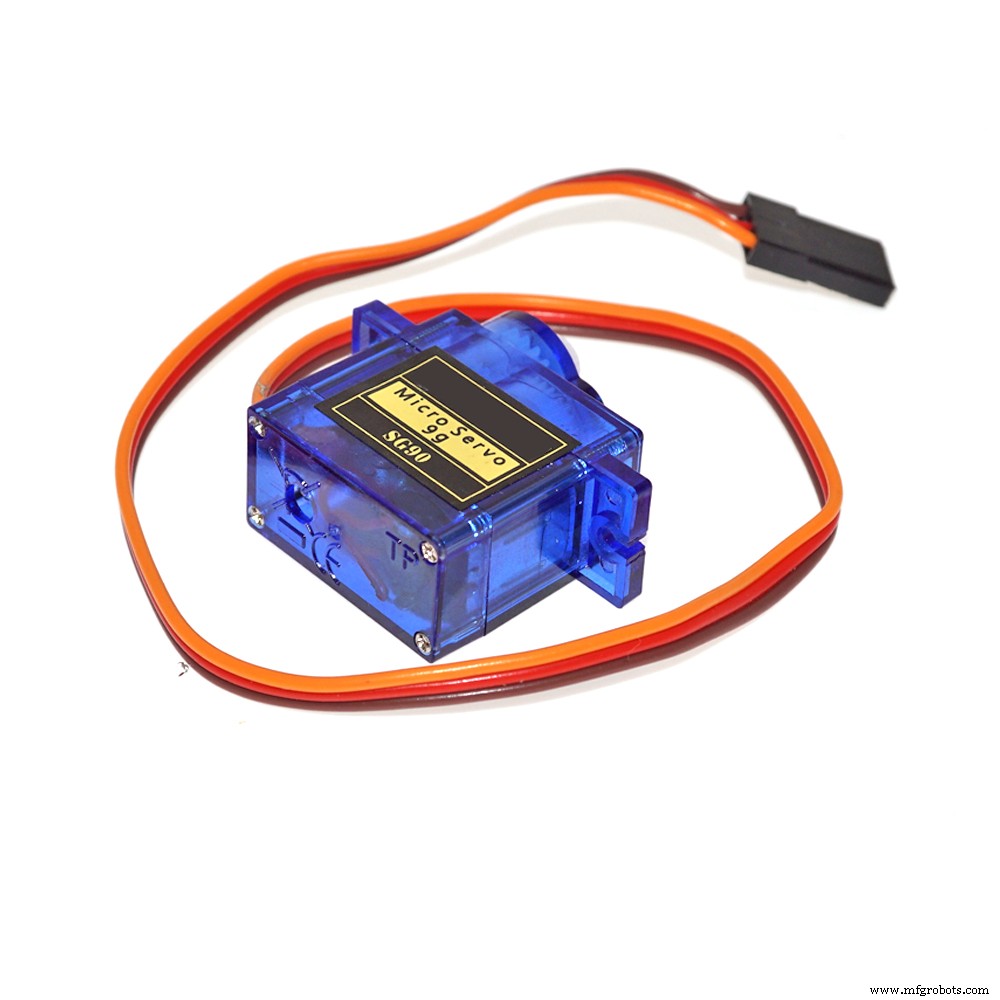
2 .Servomotor wird als Antrieb verwendet, der sich je nach Abfallart (trocken oder nass) dreht
3. Ich habe als Welle meines Servomotors eine sehr kostengünstige stationäre Skala / Lineal verwendet. Dies verbindet die obere Basis und den Servomotor. Ich habe eine Klebepistole verwendet, um es zu kleben.
- Hinweis:Sie können auch Feviquick als Kleber verwenden, aber es ist riskant, also verwenden Sie es vorsichtig.
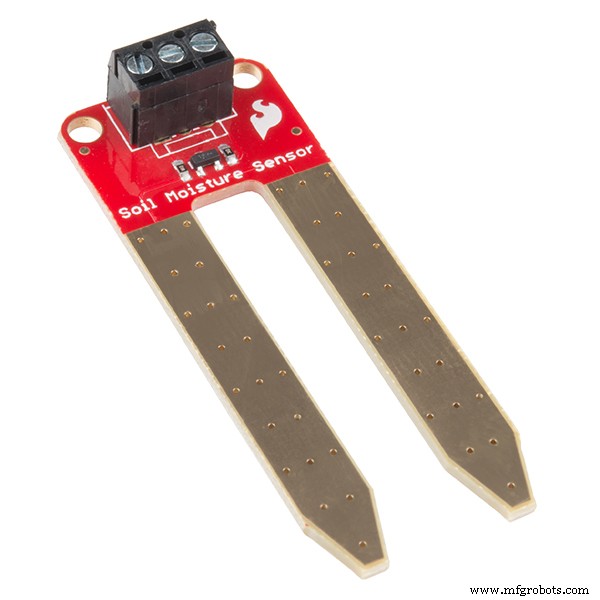
4. Der Feuchtigkeitssensor ist so am oberen Teil des Abscheiders befestigt, dass der Abfall direkt auf dem Sensor landet. Daneben gibt es noch einen Berührungssensor zur Erkennung von Trockenmüll. Damit ist der Bau dieses Projekts abgeschlossen.

Warum Sensor berühren, wenn der Feuchtigkeitssensor allein die Abfallart klassifizieren kann?
- ja es stimmt, dass feuchte nassen abfall klassifizieren kann. Trockenmüll kann er jedoch nicht klassifizieren. Warum? Stellen Sie sich vor, Sie möchten einen neutralen Zustand haben, wenn der Sensor nicht verschwendet wird. Egal wie sehr Sie es versuchen, Sie werden diesen neutralen Zustand nicht erreichen können. Der Feuchtigkeitssensor befindet sich standardmäßig immer in einem trockenen Zustand, was dazu führt, dass der Abscheider immer nach beiden Seiten kippt. Um dieses Problem zu lösen, wird ein Berührungssensor verwendet.
Implementierung Schritt für Schritt:
- Schritt 1 :Wie im obigen Bild gezeigt, sammeln Sie 2 Acrylplatten. Sie können diese Blätter überall in lokalen Geschäften kaufen oder online über Amazon bestellen.
- Schritt 2 :Machen Sie die Löcher in den Acrylplatten wie in der Abbildung gezeigt, damit Sie den Teighalter daran befestigen können.
- Schritt 3 :Dann auf die Oberseite des Batteriehalters kleben Sie den Servomotor geradeaus wie im Bild gezeigt. Sie können den Servomotor mit doppelseitigem Klebeband oder einer Klebepistole befestigen.
- Schritt 4 :Nehmen Sie dann eine stationäre Kunststoffskala (die Sie in Schulen zum Zeichnen von Linien verwendet haben) und bohren Sie unten ein Loch, das etwas kleiner ist als der Durchmesser der Motorwelle. (Sie können die Löcher mit a . bohren heißer Lötkolben oder jeder andere dünne Stahlstab.)
- Schritt 5 :Kleben Sie die andere Acrylplatte wie im Bild gezeigt mit einer Klebepistole auf die Oberseite der Skala. Achte darauf, dass es fest sitzt und sich nicht bewegt.
- Schritt 6 :Platzieren Sie den Feuchtigkeitssensor und den Berührungssensor oben auf der Acrylplatte.
>> Indem Sie diese 6 Schritte richtig befolgen, können Sie loslegen :)
Hardware-Erklärung:
Um dieses Hardware-Setup zu implementieren, müssen Sie die folgenden Konzepte eingehend lernen:
- Arduino : Arduino ist ein Mikrocontroller, der in diesem Projekt verwendet wird. Alles dazu erfahren Sie unter diesem Link. Vergessen Sie auch nicht, die offizielle Dokumentation von Arduino zu überprüfen.
- C++-Programmierung : Für die Programmierung von Arduino lernen Sie die C++-Programmierung auf einem mittleren Niveau. Sie müssen auch die Grundfunktionen von Arduino lernen.
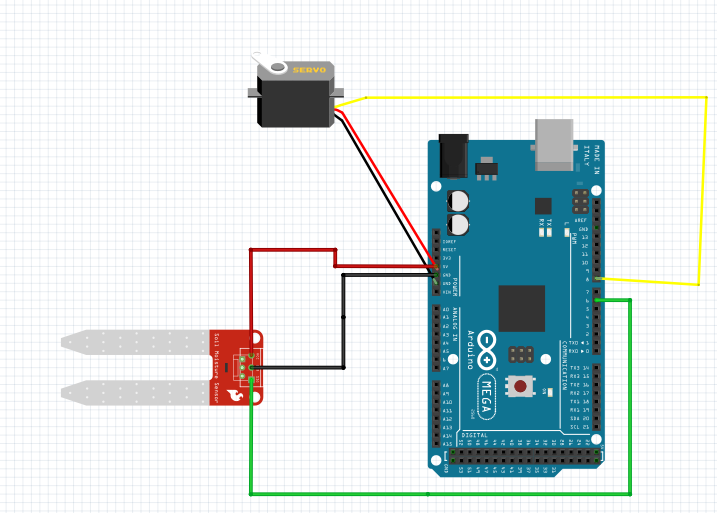
- Feuchtigkeitssensor : Sie müssen die Schnittstelle von Arduino mit dem Feuchtigkeitssensor mit Schaltplan lernen.
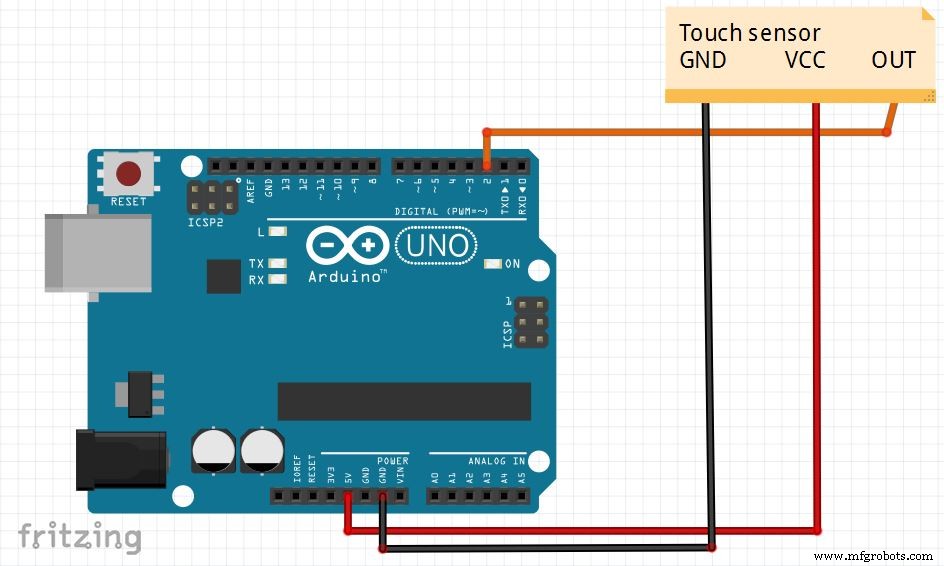
- Berührungssensor : Sie müssen die Schnittstelle von Arduino mit dem Berührungssensor mit Schaltplan lernen.
- Servomotor: Sie müssen etwas über den Servomotor lernen und wie genau er mit Arduino betrieben wird.
Funktionsweise von Smart Segregator Schritt für Schritt:
- Schritt 1: Abfall wird abgelegt und landet auf dem Feuchtigkeitssensor.
- Schritt 2 :Je nach eingestelltem Schwellenwert klassifiziert der Feuchtigkeitssensor als trocken oder nass.
- Schritt 3: Sobald Schritt 2 abgeschlossen ist, läuft der Servomotor je nach Abfallart in eine der beiden Richtungen und der Abfall wird in das entsprechende Fach geleitet.
- Schritt 4: Der gesamte Prozess ist autonom und kontinuierlich.
Video: Vergessen Sie nicht, sich die großartige Arbeit dieses Projekts anzusehen (Link ist unten angegeben :)
Code
- Intelligenter Trenner
Smart SegregatorC/C++
#includeclass Smart_Segregator/* _____________________________________________________________ | | Beschreibung | ------------ | - Dies ist ein intelligenter Separator, der trocken und nass trennt | nasser Abfall. (Es kann Metall oder Kunststoff nicht trennen) | |................................................................ ............ | | Attribute | ---------- | pin_1 :int | - Pin-Nummer des Servomotors. | | pin_2 :int | - Pin-Nummer des Feuchtigkeitssensors. | | pin_3 :int | - Berühren Sie die Sensor-Pin-Nummer. | |................................................................ ........... | | Methoden | -------- | dry_waste() | - Deckel des Abscheiders gleitet nach rechts. | | wet_waste() | - Deckel des Abscheiders gleitet nach links | | neutral_state() | - In der sich der Deckel des Abscheiders in der Mitte befindet. | | ausführen() | - Smart Segregator nimmt den Betrieb auf. | |____________________________________________________________ */{ public:int servo_pin; int feuchtigkeitssensor_pin; int touch_sensor_pin; int Detektion_Feuchtigkeit; int Detect_touch; Servo-Servo; Smart_Segregator (int pin_1, int pin_2, int pin_3) { servo_pin =pin_1; feuchtigkeitssensor_pin =pin_2; touch_sensor_pin =pin_3; Feuchtigkeit erkennen =0; detect_touch =false; aufrechtzuerhalten. Void init () { Serial.begin (9600); servo.attach (servo_pin); servo.write(90); PinMode (Feuchtigkeitssensor_Pin, EINGANG); pinMode (touch_sensor_pin, INPUT); Serial.println ( "Ihr Smart Segregator ist bereit für die Trennung!"); aufrechtzuerhalten. Void dry_waste () {servo.write (0); aufrechtzuerhalten. Void wet_waste () {servo.write (180); aufrechtzuerhalten. Void neutral_state () {servo.write (90); aufrechtzuerhalten. Void execute () {Detect_moisture =digitalRead (moisture_sensor_pin); detect_touch =digitalRead (touch_sensor_pin); if (detect_moisture> 85 &&detect_touch ==true) { wet_waste(); } else if (detect_moisture <=85 &&detect_touch ==true) { dry_waste(); aufrechtzuerhalten. Sonst { neutral_state (); } }}segregator =Smart_Segregator(8,6,2);void setup() { segregator.init();}void loop() { segregator.execute();}
Schaltpläne
Herstellungsprozess
- Arduino-Sensor – Typen und Anwendungen
- Raspberry Pi Temperatur- und Lichtsensor
- Intelligenter Abfallbehälter
- DHT11-Sensor mit LEDs und einem Piezo-Lautsprecher
- Smart Blinds
- IOT - Smart Jar mit ESP8266, Arduino und Ultraschallsensor
- Smarte Schuhe (automatische Schnürung und Stromerzeugung)
- Arduino Cloud Sensor Tower
- Einfacher und intelligenter Roboterarm mit Arduino
- Grundlegendes zum Nass- und Trockenölsumpfsystem