


Roboterarm aus recycelten Materialien
Komponenten und Verbrauchsmaterialien
| × | 3 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 |
Apps und Onlinedienste
 |
| |||
 |
|
Über dieses Projekt
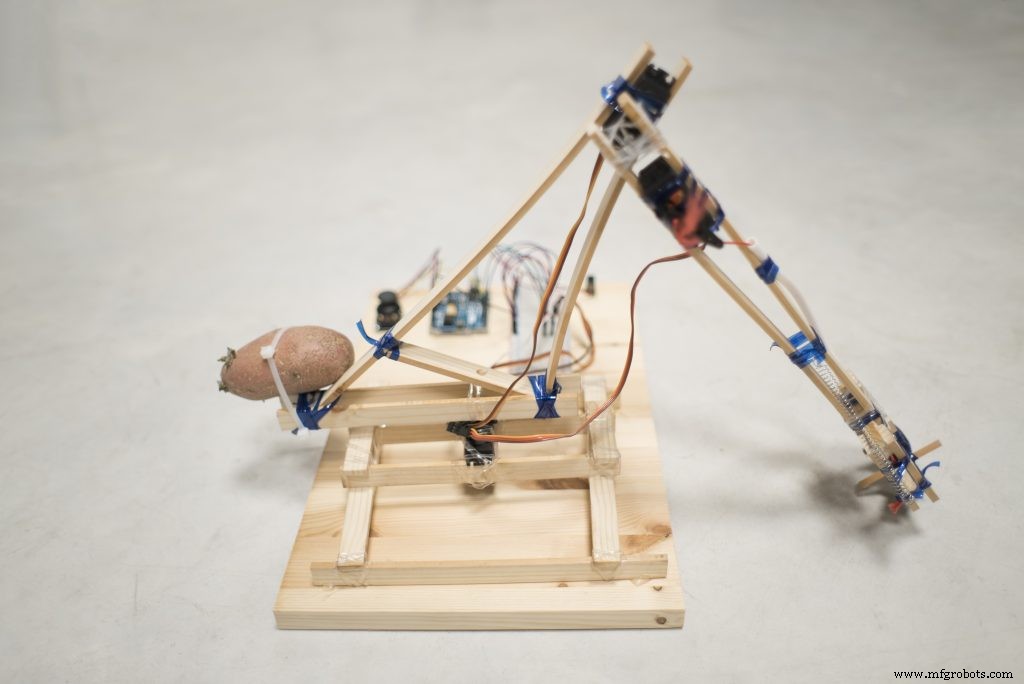
Roboterarme sind eines der beliebtesten DIY-Projekte, die Sie online finden. Als wir uns zusammensetzten, um unsere Version eines Arduino-Roboterarms zu entwerfen, beschlossen wir, eine Herausforderung anzunehmen und ihn aus recycelten Materialien herzustellen. Maker zu sein bedeutet für uns auch, über den Tellerrand hinaus zu denken und sich zu fragen, wie man unterschiedliche Materialien, die einem zur Verfügung stehen, nutzen kann, ohne mehr Abfall zu produzieren. Aus Altholz und einigen Plastikflaschen setzten wir den Körper des Roboterarms zusammen. Wir haben Schrumpfschläuche aus Plastikflaschen mit einer netten Technik hergestellt, die wir online gelernt haben, und eine Kartoffel (!) als Gewicht verwendet, damit der Roboter nicht umkippt.
Dieses Projekt hat uns viel Spaß gemacht, da es uns daran erinnert hat, warum wir es lieben, machen so viel.
Das vollständige Tutorial für dieses und andere Projekte finden Sie auch in unserem Blog.
Hinweis:In der video Sie sehen eine frühere Version von Circuito.io, daher ist es am besten, die Schritte im Tutorial zu befolgen.
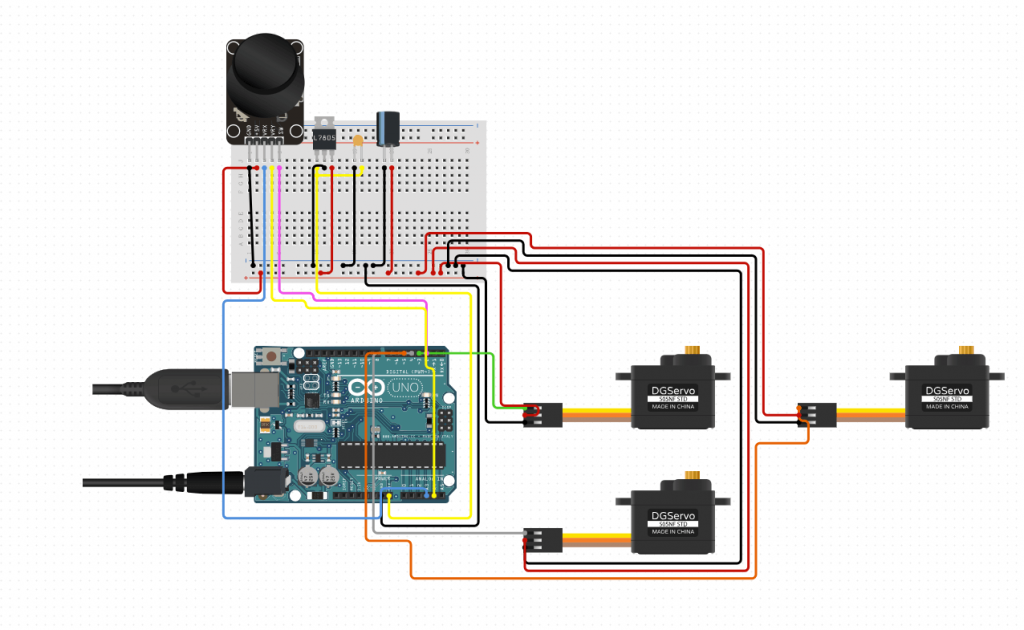
Elektronik
Hauptkomponenten
- Arduino UNO
- 3 SparkFun-Servos (generisches Metallgetriebe)
- PS2 Joystick 2-Achsen-Modul
Sekundärkomponenten
- Spannungsregler 5V
- Elektrolytkondensator - 1uF/50V
- Kondensator Keramik 100nF
- Kühlkörper TO-220
- Brotbrett - halbe Größe
- Überbrückungskabelpaket - M/M
Klicken Sie hier, um den Schaltplan anzuzeigen
Roboterarmcode
- Zuerst müssen Sie den Schaltungscode herunterladen aus dem Code-Tab auf Circuito.io.
- Folgen Sie den Schritten, um zu überprüfen, ob Sie es richtig verkabelt haben
- Ersetzen Sie den Firmware.ino-Testcode von Circuito.io durch den Firmware.ino-Code im Repository. Lassen Sie die anderen Bibliotheken unverändert.
- Stellen Sie sicher, dass Sie "Bibliotheken einschließen" und "Pin-Definitionen" beibehalten. Überprüfen Sie, ob die Pin-Definitionen übereinstimmen.
Materialien

- Wir haben 1 cm dicke Holzreste verwendet, die wir in unserer Werkstatt hatten. An einigen Stellen haben wir 2 Teile für zusätzliche Festigkeit und Robustheit zusammengeklebt. Sie können nach anderen Materialien suchen, die Sie um sich herum haben, aber stellen Sie sicher, dass es robust und dennoch flexibel ist.
- Um die Teile zusammenzubinden, haben wir Schrumpfschläuche aus Plastikflaschen hergestellt. Es ist eine großartige Technik, die Sie mit Plastikflaschen machen können, die Sie zu Hause haben. Spielen Sie herum und testen Sie diese ein wenig, Sie werden überrascht sein, wie stark sie sind.
- Der Arm bewegt sich in 3 Achsen, daher verwenden wir 3 Servomotoren. Hier ist ein guter Artikel, der erklärt, wie Sie einen Servomotor für Ihr Projekt auswählen. Wir werden den Sparkfun Servo verwenden - ein generisches Metallgetriebe.
Montage
Die Basis
Beginnen Sie den Bau mit einer soliden Basis, damit der Arm nicht umkippt. Gleichzeitig müssen wir auch verstehen, wie man die Holzstücke am besten zusammenbindet und zusammenbindet, damit die Basis fest wird.
Im Bild unten sehen Sie, wie wir die Schrumpfschläuche und eine Kartoffel (!) als Basis als Gewicht verwendet haben. Vergiss nur nicht, es von Zeit zu Zeit zu ersetzen :)
Guthaben
Das Platzieren des zweiten Servos war schwieriger und wir haben das Gefühl, dass dieser Bereich noch etwas Aufmerksamkeit benötigt. Nach dem Bau des Prototyps stellten wir fest, dass wir uns zu wenig Gedanken über das Ausbalancieren des Oberarms gemacht hatten. Daher zieht der Servomotor viel Strom - etwas, das durch die Verwendung eines Gegengewichts auf der gegenüberliegenden Seite des Arms überwunden werden kann.
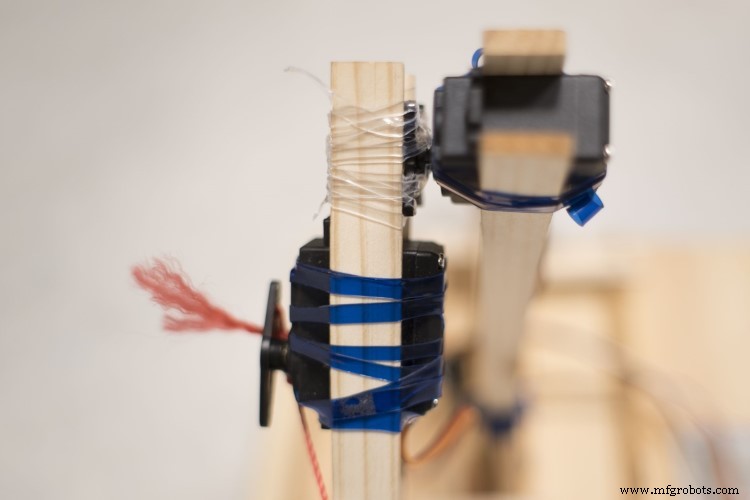
Der Greifer
Es gibt verschiedene Arten von Greifern, die wir in Betracht gezogen haben, und wir waren uns nicht sicher, was wir hier tun werden. Schließlich haben wir uns entschieden, eine Seite des Greifers statisch zu machen, damit er einen starken Griff hat. Wie Sie im Bild unten sehen können, haben wir für den beweglichen Teil ein Gelenk hergestellt, das vom Servo gesteuert wird und eine Feder zum Schließen und Öffnen hinzugefügt.
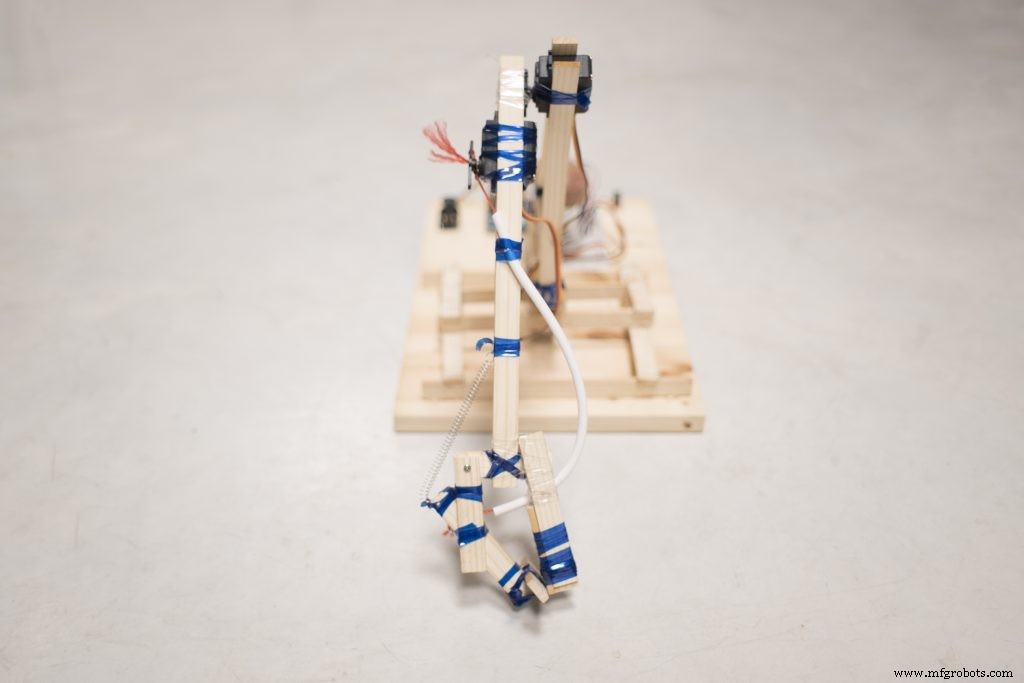
Schließlich haben wir eine Schnur in ein elastisches Rohr gelegt, um den Servomotor und den Greifer zu verbinden, der gleiche Mechanismus, den Sie in Fahrradbremsen finden.
Das ist es im Grunde! Sie müssen wahrscheinlich kleinere Anpassungen und Änderungen am Code und an der Mechanik vornehmen, je nach Material und Elektronik, die Sie verwenden. Wenn Sie Einblicke oder Kommentare haben, würden wir uns freuen, sie zu hören! Teile sie mit uns in unserem Forum oder in den Kommentaren unten
Code
Roboterarm-Code
1. Ersetzen Sie den Firmware.ino-Testcode von Circuito.io durch den Firmware.ino-Code in diesem Repository2. Lassen Sie die anderen Bibliotheken unverändert.3. Stellen Sie sicher, dass Sie "Bibliotheken einbeziehen" und "Pin-Definitionen" belassen4. Überprüfen Sie, ob die Pin-Definitionen übereinstimmenhttps://github.com/Circuito-io/Robotic-ArmHerstellungsprozess
- Der Open-Source-3D-gedruckte Roboterarm von Haddington Dynamics
- Zweiarmiger SCARA-Roboter
- Unterschiede zwischen Robotermanipulator und Roboterarm
- MeArm-Roboterarm – Ihr Roboter – V1.0
- Arduino 3D-gedruckter Roboterarm
- Nunchuk-gesteuerter Roboterarm (mit Arduino)
- Über Ethernet gesteuerter Roboterarm
- Automatisierter Lötroboterarm
- GXO pilotiert kundenspezifischen Roboterarm für die Mode-E-Commerce-Logistik
- Der industrielle Roboterarm – ein Produktionsboom