


Bluetooth-gesteuertes Auto
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
| × | 2 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Apps und Onlinedienste
 |
|
Über dieses Projekt
Hallo zusammen!
Alles, was kontrolliert werden kann, ist großartig. Ist es nicht? Wir Menschen lieben es, Dinge zu steuern und deshalb sind Automatisierung und Robotik so faszinierend.
In diesem Tutorial erfahren Sie, wie Sie Ihr eigenes Bluetooth-gesteuertes Auto erstellen. Fangen wir also an.
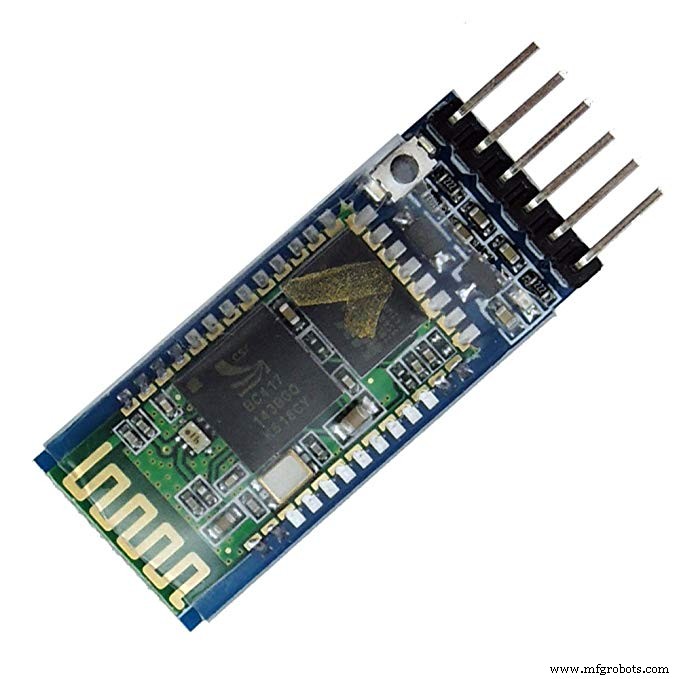
Dies wird ein Bluetooth-gesteuertes Auto sein, daher werden wir für dieses Projekt das HC-05-Bluetooth-Modul verwenden, um die steuernden Datenpakete zu empfangen.
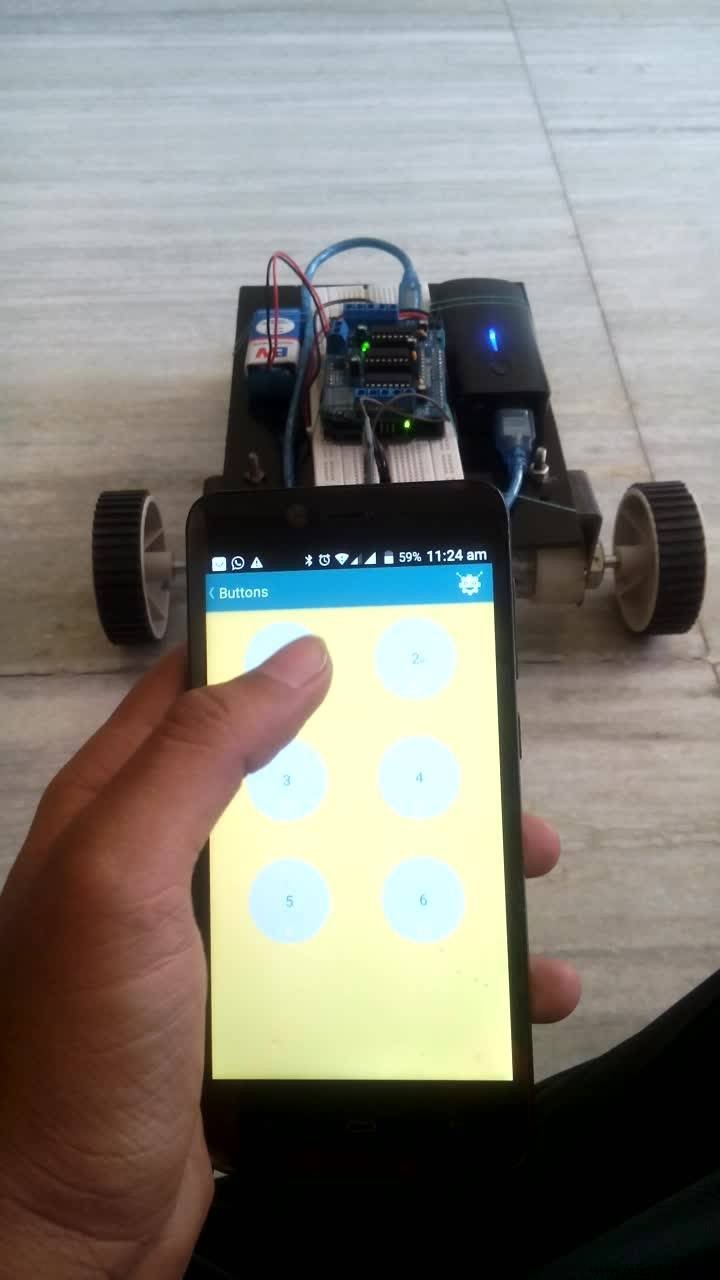
Wir benötigen auch eine Android-App, die die steuernden Datenpakete an das Bluetooth-Modul sendet. Zu diesem Zweck verwenden wir eine Drittanbieteranwendung (klicken Sie hier, um sie herunterzuladen).
- -> Okay Leute! Lass uns die Hardware bauen.
- -> Karosserie des Autos.
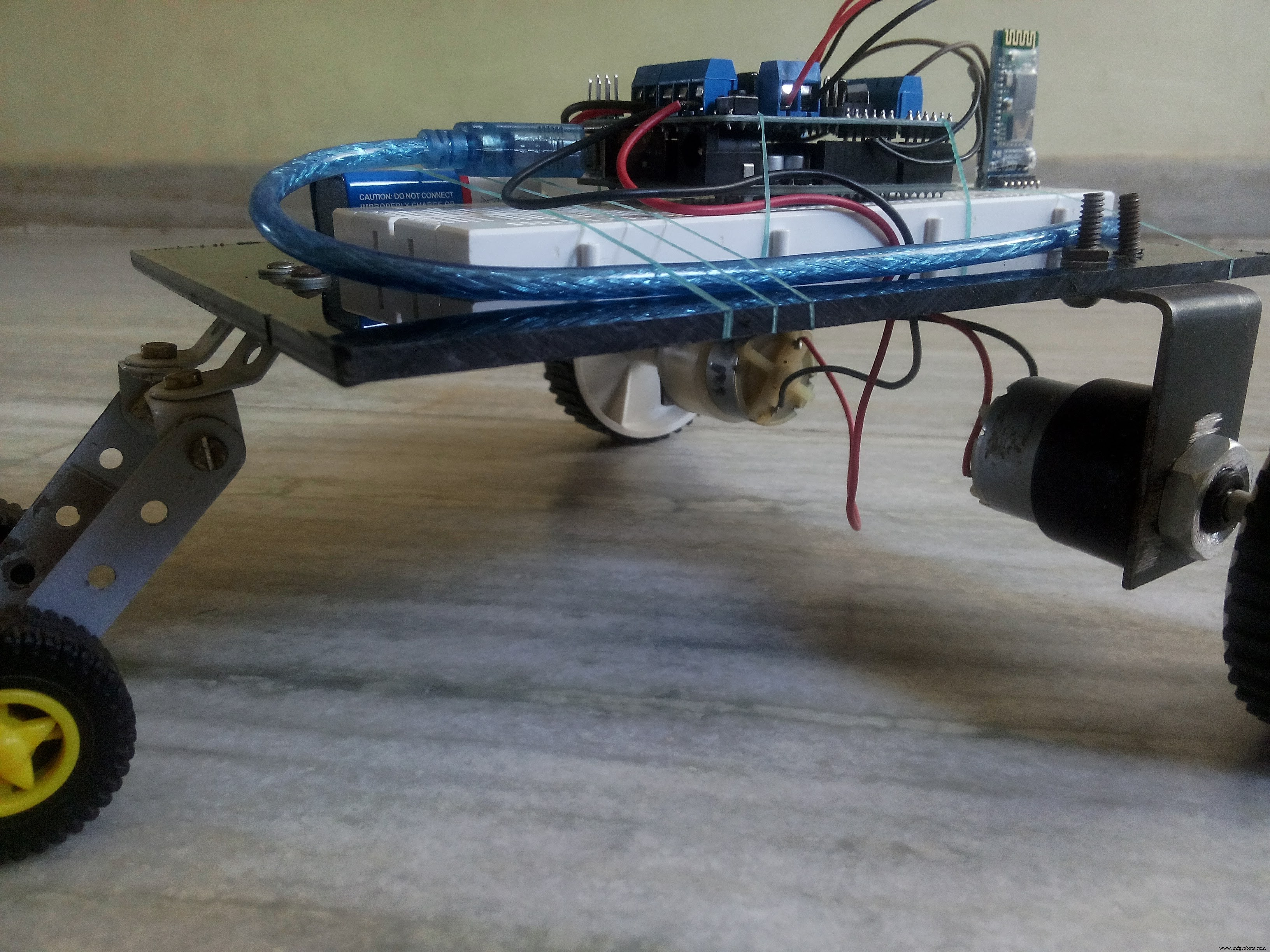
Das Auto, das wir für dieses Projekt bauen, wird ein Doppelmotorfahrzeug sein. Ich habe zwei 12 V 200 U/min Gleichstrommotoren verwendet. Sie können ein fertiges Chassis verwenden. Als Chassis habe ich eine PVC-Platte verwendet.
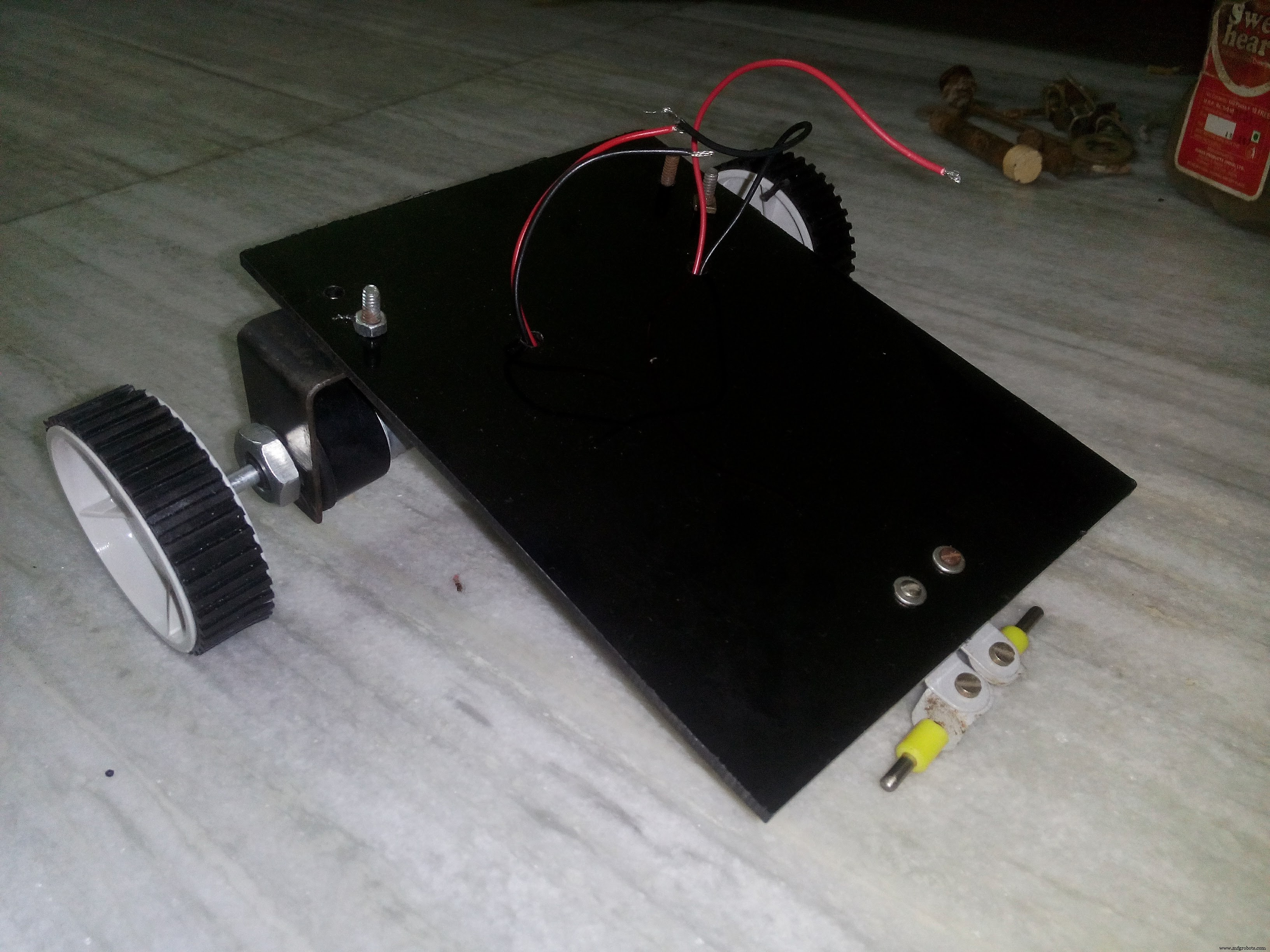
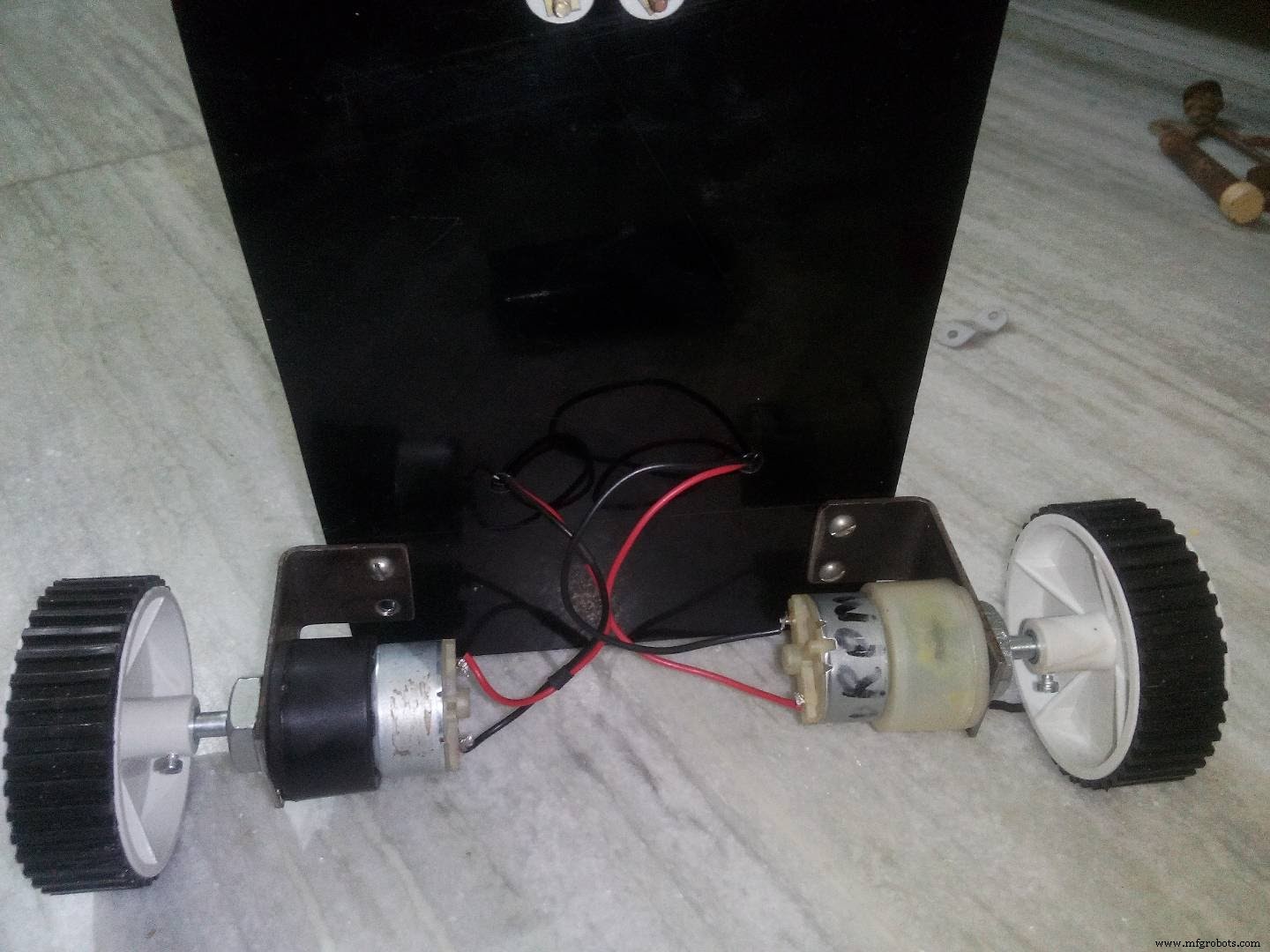
Damit ist die Grundstruktur unseres Autos fertig. Sie können dieses Design verwenden oder Ihr eigenes Design entwickeln, aber denken Sie daran, das Gewicht so gering wie möglich zu halten, da es sich um ein Design mit zwei Motoren handelt.
--> Rundgang
Lassen Sie uns nun die Schaltung bauen
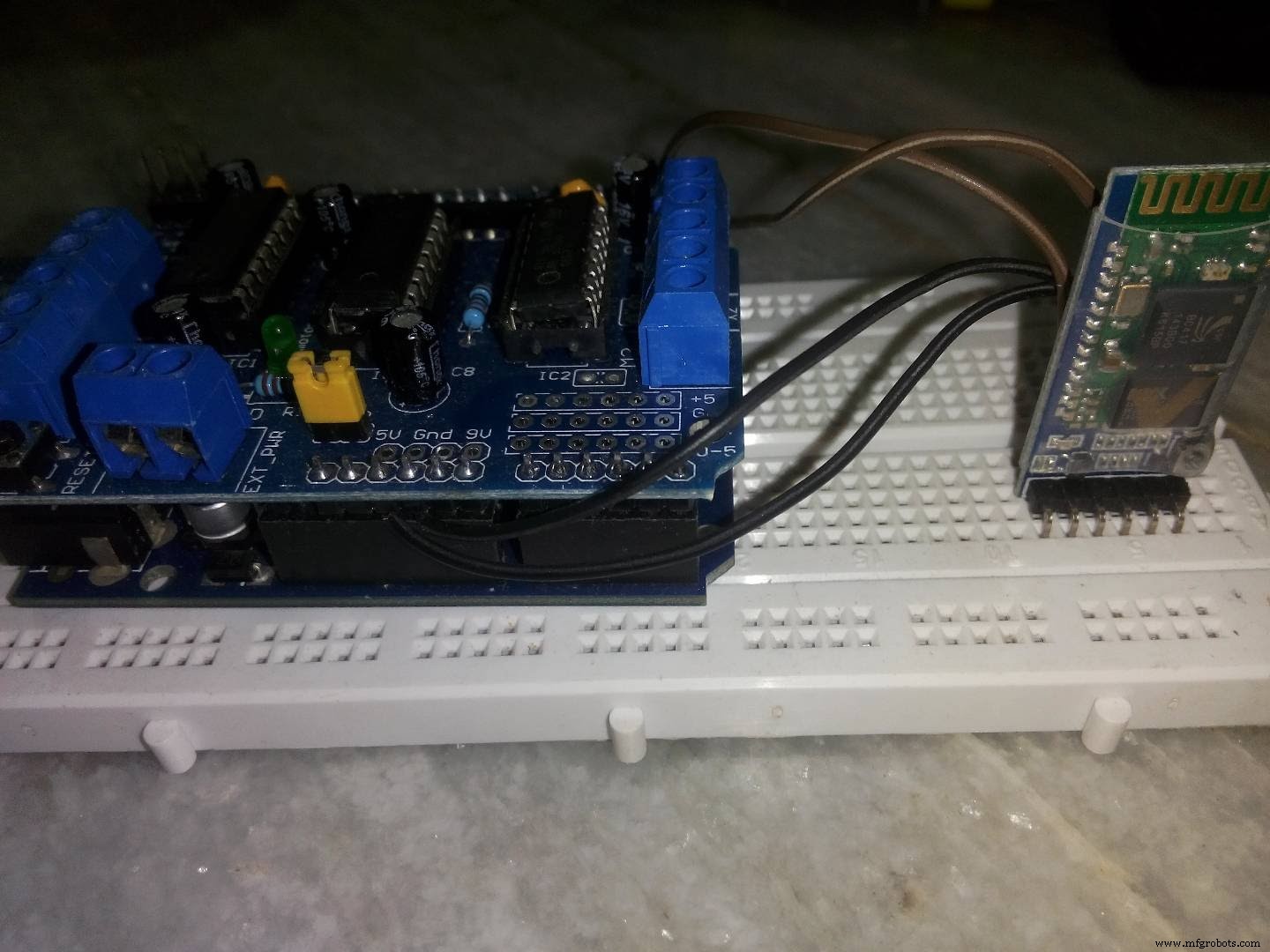
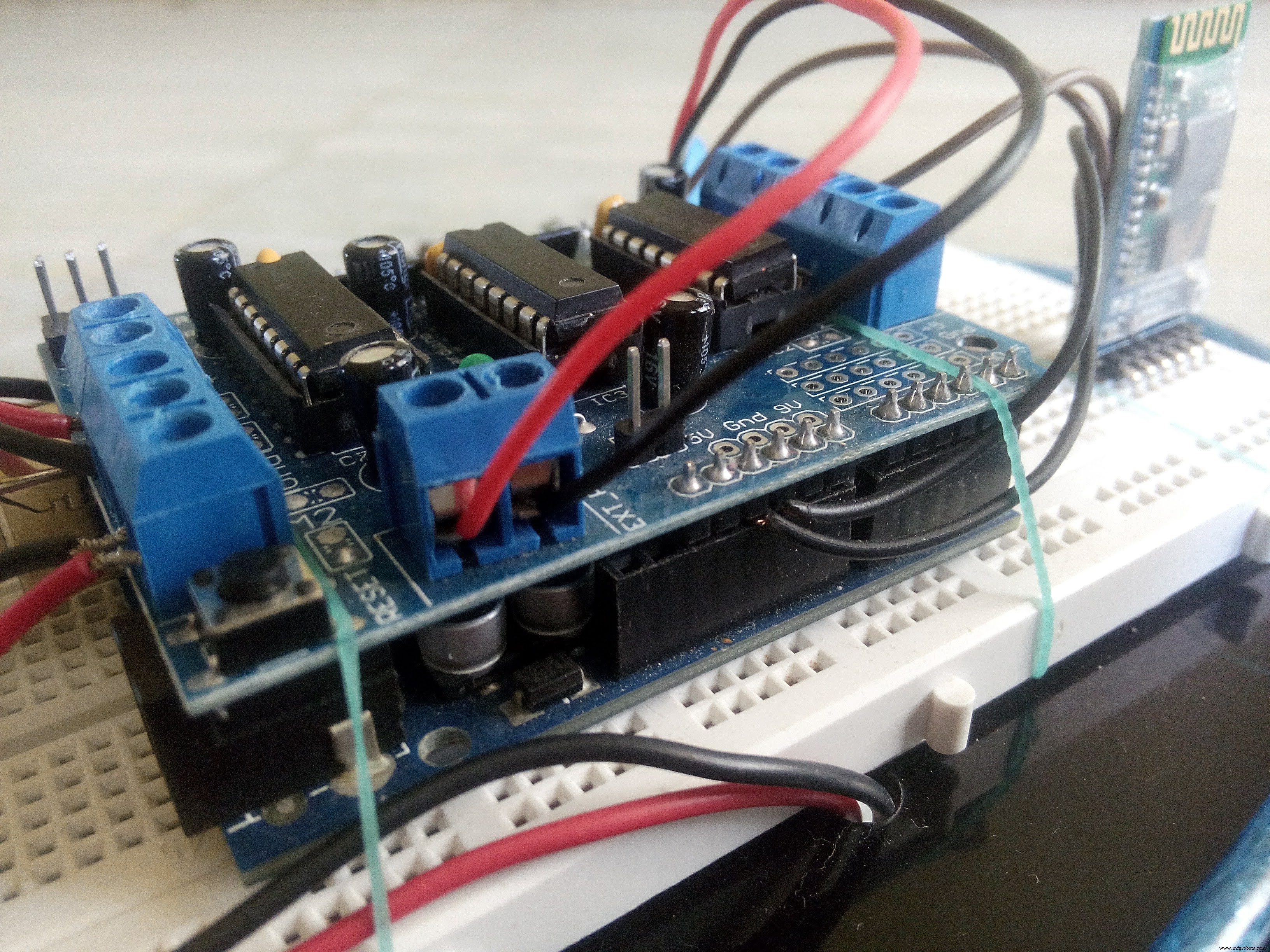
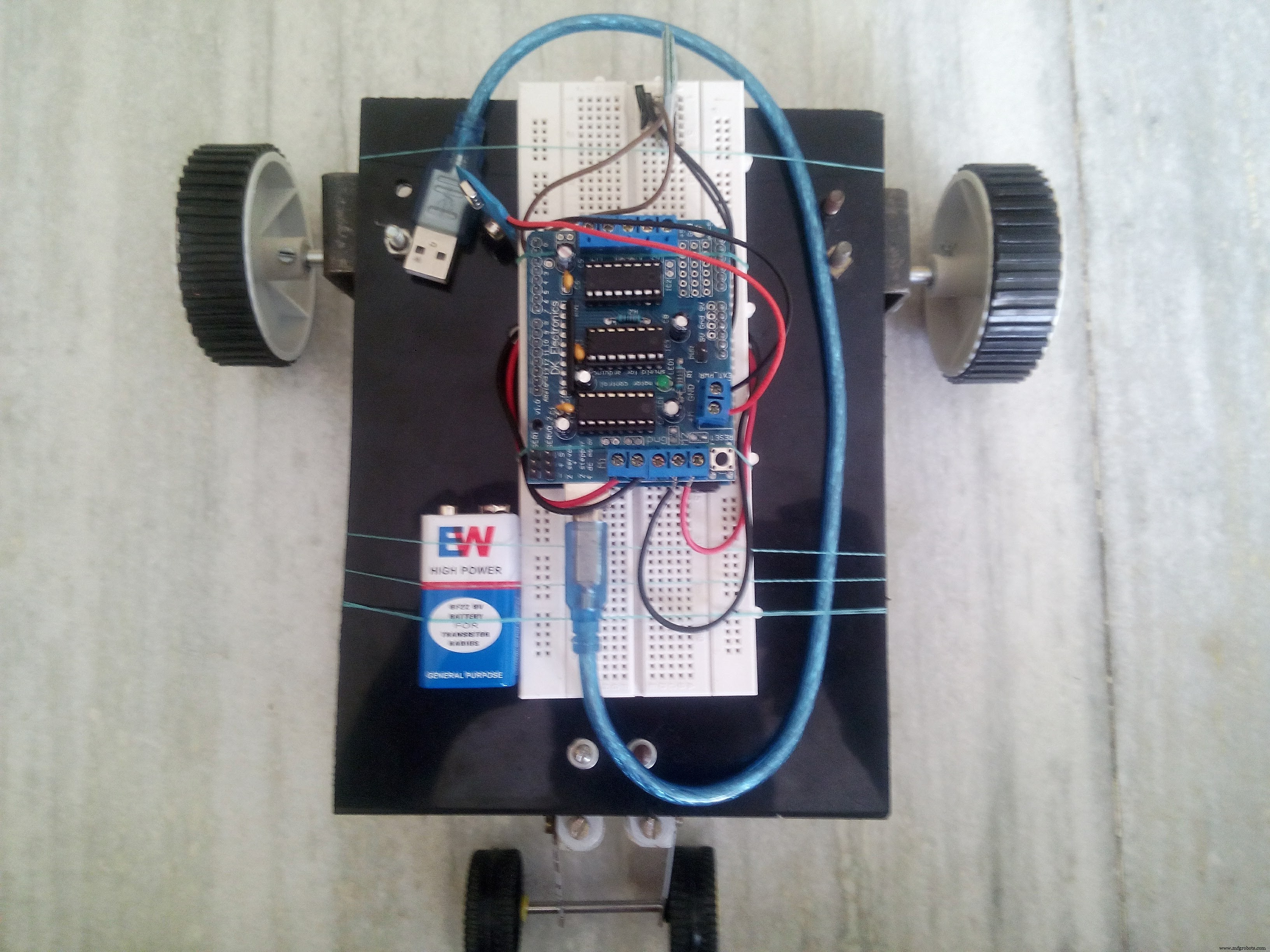
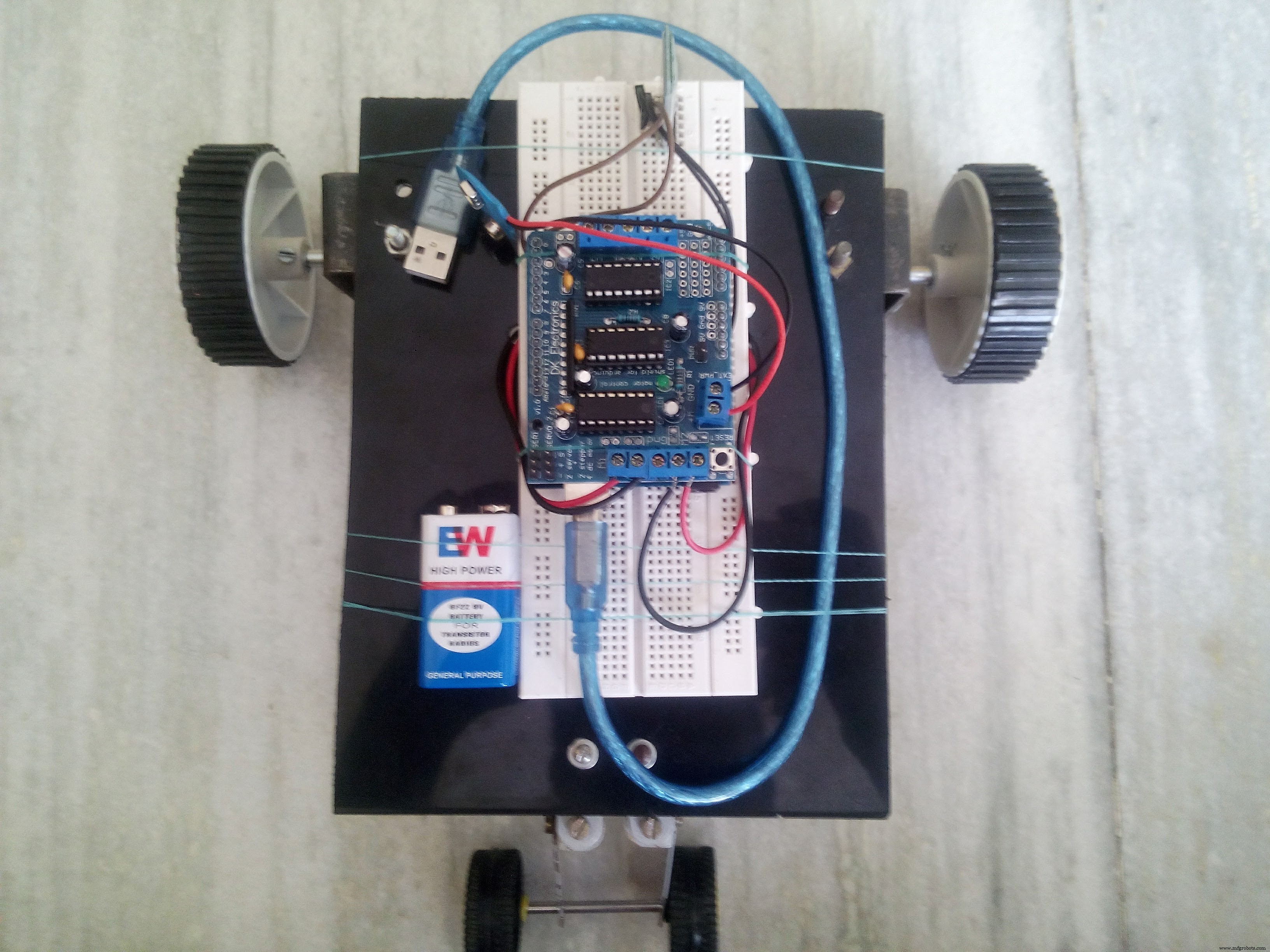
Folgen Sie dem Schema, um die Verbindungen herzustellen. So sieht es aus, nachdem alle Verbindungen hergestellt wurden.
--> Stromversorgung
Das ist jetzt ein bisschen entscheidend.
Zur Stromversorgung des Arduino Uno wird eine Powerbank mit 5V Ausgangsspannung verwendet. Dies reicht nicht aus, um diese 12-V-Gleichstrommotoren anzutreiben. Wir brauchen also eine zusätzliche Stromquelle.
Ich habe zwei 9-V-Batterien in Reihe verwendet, um eine 18-V-Versorgung zu erhalten. Das Hauptproblem hierbei war, dass hier auch eine ordentliche Menge Strom benötigt wurde.
Meine Batterien konnten nicht genügend Strom liefern und so war die Leistung dieses Autos nicht 100% zufriedenstellend. Es funktionierte, aber die Motoren liefen mit sehr niedriger Geschwindigkeit.
Daher empfehle ich, eine 12-V-Batterie zu verwenden, da Sie sonst Kompromisse bei der Geschwindigkeit eingehen müssen.
-->Code
Hier verwenden wir die Drehrichtung von Motoren, um die Richtung des Autos zu steuern.
Vorwärts - Beide Motoren bewegen sich in Vorwärtsrichtung
Rückwärts - Beide Motoren bewegen sich in Rückwärtsrichtung
Links - Linker Motor bewegt sich rückwärts und rechter Motor bewegt sich vorwärts
Rechts - Linker Motor bewegt sich vorwärts und rechter Motor bewegt sich rückwärts
Stopp - Beide Motoren stoppen
void forward(){ motor1.run(FORWARD); motor2.run (FORWARD);} rückwärts ungültig () { motor1.run (BACKWARD); motor2.run(BACKWARD);}void left(){ motor1.run(BACKWARD); motor2.run(FORWARD);}void right(){ motor1.run(FORWARD); motor2.run(BACKWARD);}void Stop(){ motor1.run(RELEASE); motor2.run(RELEASE);}
---------------------------------------------------------- ---------------------------------------
Das war es also!
1. Laden Sie einfach den Code auf den Arduino hoch.
2. Stellen Sie die Verbindungen her.
3. Starten Sie die App.
4. Verbinden Sie Ihr Telefon mit dem Auto.
Hier ist unsere fertige BEAUTY!

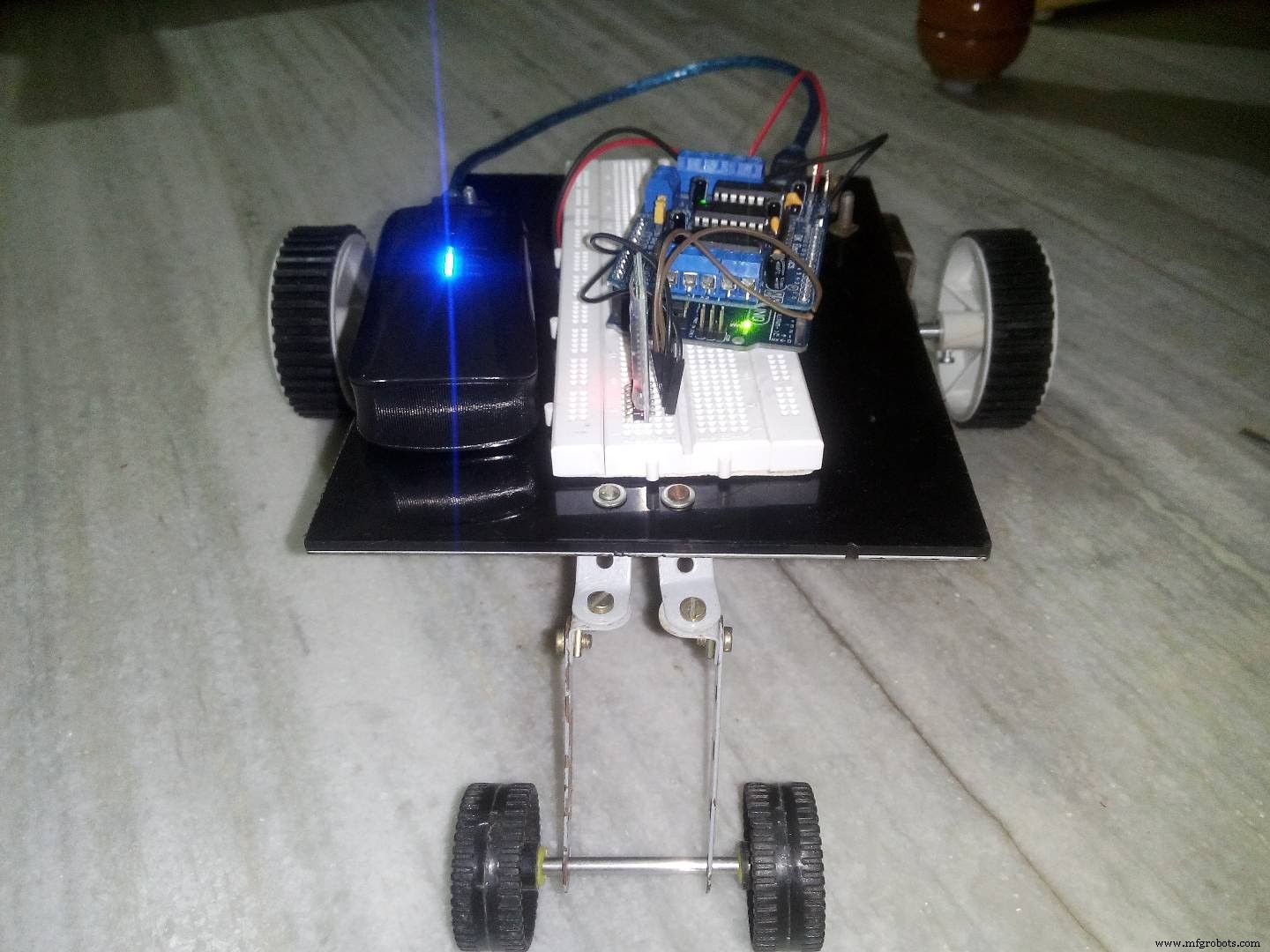
Ich hoffe, dieses Tutorial war gut genug, um Sie zum Laufen zu bringen. Wenn Sie Vorschläge für Änderungen oder weitere Ergänzungen zu diesem Projekt haben, teilen Sie mir dies bitte im Kommentarbereich mit.
Code
- Der Code
Der CodeC/C++
Dieser Code muss auf Arduino Uno#includeAF_DCMotor motor1(1) hochgeladen werden; // motor1 ist der linke motorAF_DCMotor motor2 (2); // motor2 ist das richtige motorint val;void setup () { Serial.begin (9600); motor1.setSpeed(255); // Motordrehzahl wird eingestellt motor2.setSpeed (255); Stop();}void loop() {bt=Serial.read();if(val=='1') // Wenn das Bluetooth-Modul 1 empfängt, bewegt sich das Auto vorwärts {forward(); } if (val =='2') // Wenn das Bluetooth-Modul 2 empfängt, bewegt sich das Auto rückwärts {rückwärts (); } if (val =='3') // Wenn das Bluetooth-Modul 3 erhält, bewegt sich das Auto nach links {links (); } if (val=='4') // Wenn das Bluetooth-Modul 4 erhält, bewegt sich das Auto nach rechts {right(); } if (val=='5') // Wenn das Bluetooth-Modul 5 erhält, stoppt das Auto {Stop(); }}Vorwärts ungültig () { motor1.run (FORWARD); motor2.run (FORWARD);} rückwärts ungültig () { motor1.run (BACKWARD); motor2.run(BACKWARD);}void left(){ motor1.run(BACKWARD); motor2.run(FORWARD);}void right(){ motor1.run(FORWARD); motor2.run(BACKWARD);}void Stop(){ motor1.run(RELEASE); motor2.run(RELEASE);}
Schaltpläne
Das sind die Verbindungen. Schließen Sie die 12-V-Stromquelle an das Motortreiberschild an. Bitte beachten Sie, dass der Schaltplan die externe Stromquelle nicht enthält.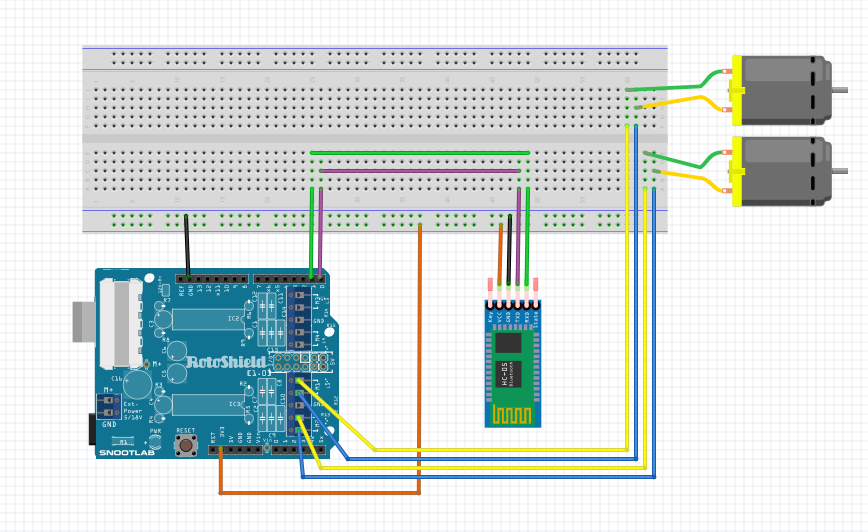
Herstellungsprozess
- Raspberry Pi Roboter über Bluetooth gesteuert
- Verwandeln Sie Ihr RC-Auto in ein Bluetooth-RC-Auto
- Joystick-gesteuertes RC-Auto
- Arduino mit Bluetooth zur Steuerung einer LED!
- Einfacher UNO-Rechner
- Sprachgesteuerter Roboter
- Beharrlichkeit der Vision
- Sprachgesteuerte Bluetooth-Geräte mit OK Google
- Wi-Servo:Wi-Fi browsergesteuerte Servomotoren
- RC-Porsche-Auto (Arduino-Projekt)