


Handgesten-gesteuerter Roboter
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 2 | |||
| × | 1 |
Apps und Onlinedienste
 |
|
Über dieses Projekt
AKTUALISIERUNG:AKTUALISIERTE VERSION DIESES PROJEKTS FINDEN SIE HIER
Einführung
Ich wünschte, ich könnte alles mit meinen Händen kontrollieren! Auf meinem Stuhl sitzen und Dinge kontrollieren wie ein BOSS. Ich würde es lieben! Also habe ich endlich einen coolen DIY-Roboter zur Handgestenerkennung herausgebracht, der den Befehlen von Handgesten folgen kann. Klingt verrückt, aber ich verspreche, es ist ganz einfach. Einen Roboter mit Gestensteuerung zu bauen ist eigentlich sehr einfach. Dieser Roboter ist eine Verbesserung meines anderen DIY-Projekts RC-Auto mit RF-Modul.
Auch hier ist der Roboter in zwei Teile geteilt, Sender und Empfänger. Die Empfängerschaltung ist die gleiche wie bei der alten Post und es gibt nur eine geringfügige Änderung in der Senderschaltung, hier müssen wir die Senderschaltung programmieren. Ich werde also ein Arduino als Programmierplattform verwenden. Um die Gesten zu erkennen, verwende ich einen Beschleunigungssensor. Also lass uns bauen!
Beobachten Sie den Roboter in Aktion
Was ist das und wie funktioniert es?
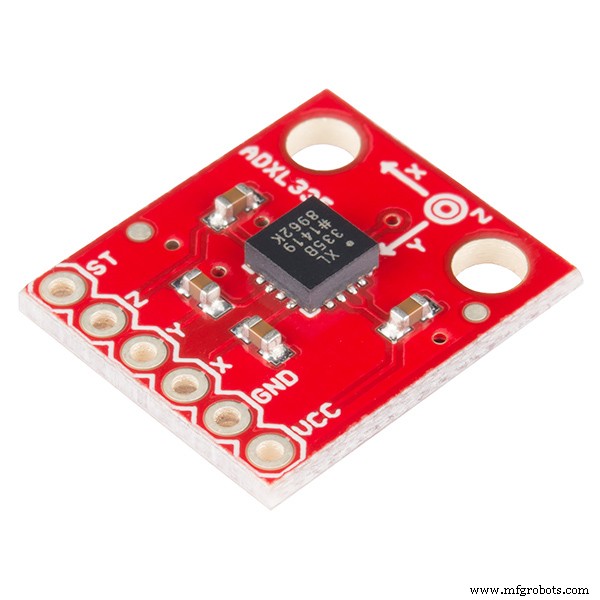
Was ist ein Beschleunigungsmesser (ADXL335)?
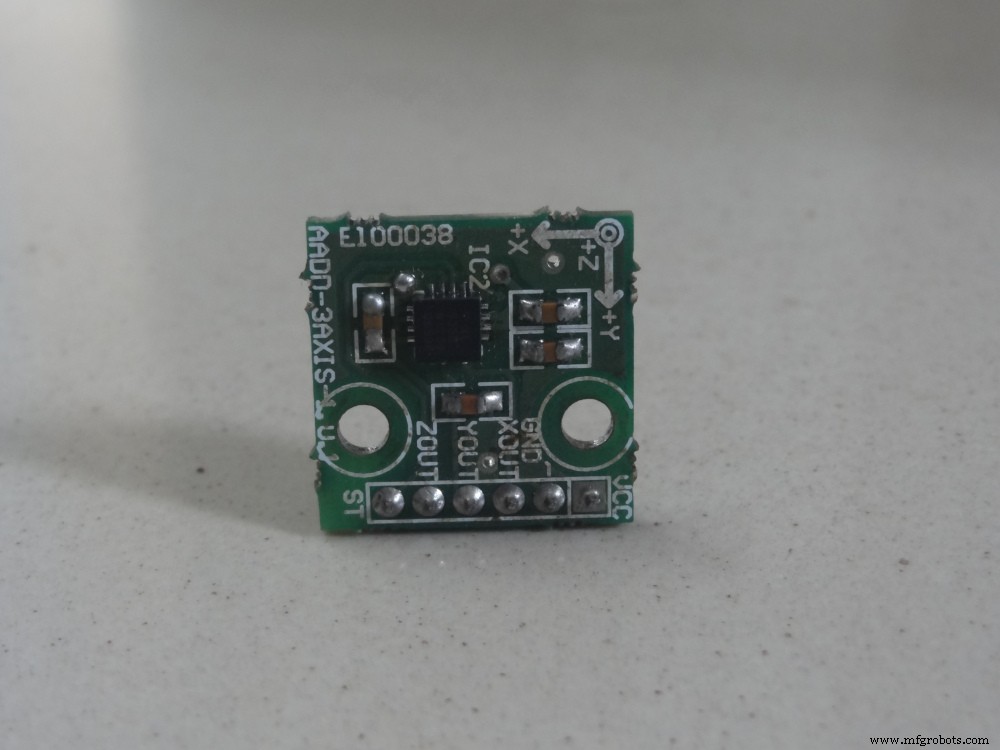
Kurz gesagt, ein Beschleunigungsmesser ist ein dreiachsiges Beschleunigungsmessgerät. Der hier verwendete Beschleunigungsmesser ist ADXL335 und hat 3 Achsen (X Y Z).
Fast alle Smartphones haben jetzt Beschleunigungsmesser (auch wenn wir sie nicht von einem Smartphone nehmen werden). Sie haben definitiv Bewegungsspiele auf Ihrem Handy gespielt (z. B. Temple Run), bei denen sich der Charakter im Spiel nach links und rechts bewegt, wenn Sie Ihr Telefon nach links und rechts neigen, bzw. der Beschleunigungsmesser übernimmt.
Es gibt einen weiteren Sensor namens Gyroscope im Smartphone, den wir jetzt nicht brauchen.
Wie funktioniert es und erkennt die Gesten?
Hier ist das Gehirn des Roboters Arduino Uno (Atmega32), das mit einem Codesatz gefüttert wird. Die von Hand ausgeführten Gesten/Bewegungen werden von einem Beschleunigungsmessgerät namens Beschleunigungsmesser (ADXL335) erkannt.
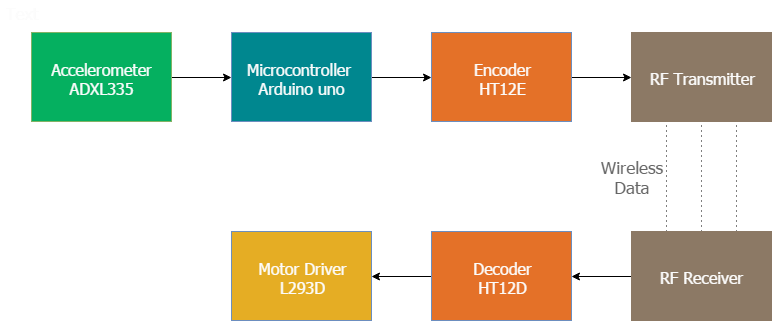
Hier liest der Beschleunigungsmesser die X Y Z-Koordinaten, wenn wir mit der Hand Gesten machen und die X Y Z-Koordinaten an den Arduino senden (hier brauchen wir nicht die Z-Achse, wir brauchen nur zwei koordinierte X und Y. Vernachlässigen Sie also die Z-Koordinate). Der Arduino überprüft die Koordinatenwerte und sendet einen 4-Bit-Code an den Encoder-IC. Der Encoder leitet die Daten an den Sender weiter und die übertragenen Daten werden vom HF-Empfänger empfangen. Der Empfänger sendet den 4-Bit-Code an den Decoder-IC und der Decoder übergibt ihn an den Motortreiber-IC. Später trifft der Motortreiber die Entscheidung, die beiden Motoren in die gewünschte Richtung zu drehen.
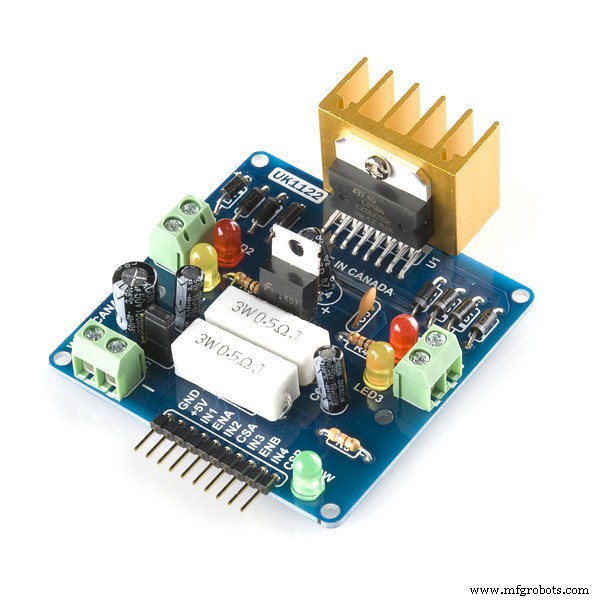
Stellen Sie die Stromversorgung her
Zuerst beginnen wir mit der Stromversorgungsschaltung. Wir brauchen zwei Stromversorgungskreise:einen für den Sender und einen für den Empfänger. Die Empfängerschaltung muss mit einer 12-V-Versorgung betrieben werden (da ich einen 12-V-Motor verwende) und die Senderschaltung kann mit einer 9-V-Batterie betrieben werden.
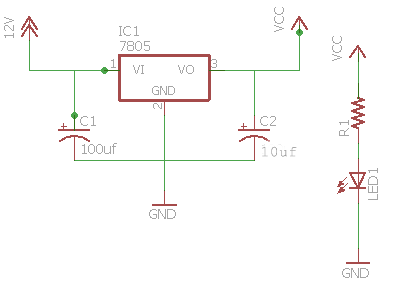
Rechts sehen Sie die Schaltung für die Empfängerstromversorgung. Verdrahten Sie den Versorgungsstromkreis anhand dieses Diagramms. Sie können auch eine LED über einen 1k-Widerstand hinzufügen, um den Zustand der Stromversorgung anzuzeigen.
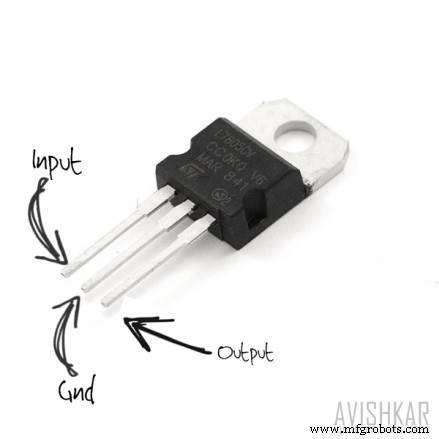
- IC 7805, der die 12-V-Versorgung auf 5 V regelt (wenn Sie keine 12-V-Versorgung erhalten, können Sie eine 9-V-Versorgung verwenden)
- 0,1uf- und 470uf-Kondensator
- 1k Widerstand für die Status-LED
HINWEIS: Verwenden Sie einen Kühlkörper für 7805, da wir 7 V (12-5) abfallen lassen, sodass viel Wärme erzeugt wird, um den Regler zu verbrennen, daher wird die Verwendung eines Kühlkörpers empfohlen.
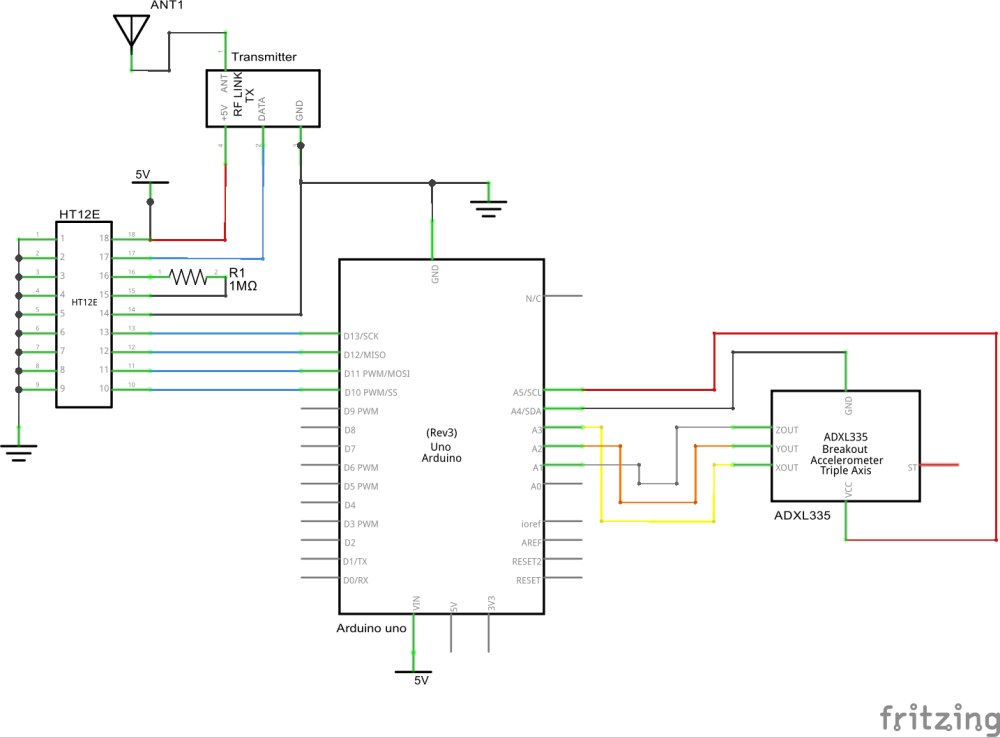
Beginnen wir mit der Herstellung des Senders (Fernbedienung)
Der Senderabschnitt besteht aus einem Beschleunigungsmesser, der die Handgeste erkennt und die Daten an das Arduino sendet. Später sendet Arduino Daten entsprechend den vom Beschleunigungsmesser empfangenen Daten an den Encoder-IC und die Daten werden an den Empfänger übertragen. Verdrahten Sie gemäß der folgenden Schaltung:
HINWEIS: Bitte beachten Sie, dass einige Beschleunigungsmesser eine 3,3-V-Stromversorgung verwenden und durch 5 V beschädigt werden können. Sehen Sie in der Dokumentation des Lieferanten nach, um herauszufinden, welche Spannung die richtige ist.
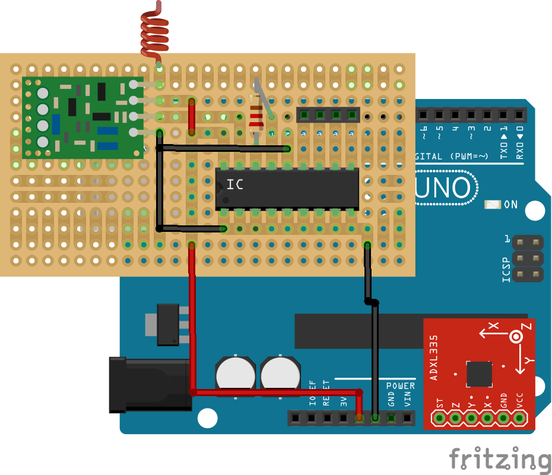
Dies ist nur eine Illustration des Senders:
Code auf Arduino hochladen
Hier ist der aktualisierte Code
Machen Sie den Empfänger
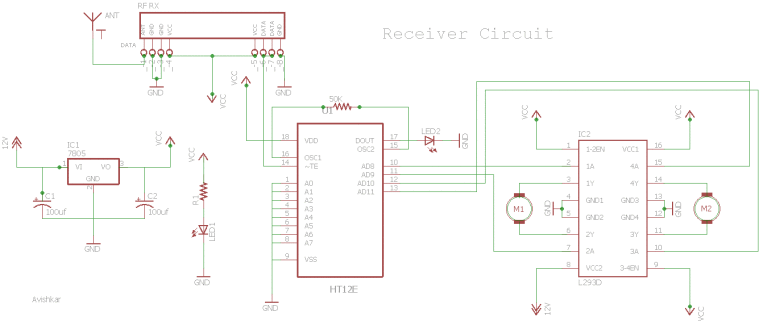
Die Empfängerschaltung besteht aus 2 IC (HT12D-Decoder, L293D-Motortreiber), HF-Empfängermodul.
Verdrahten Sie die Schaltung gemäß dem obigen Empfängerschema. Auf der Empfängerplatine befinden sich 2 LEDs, eine leuchtet, wenn der Empfänger mit Strom versorgt wird und die andere, wenn der Senderstromkreis mit Strom versorgt wird. Die LED in der Nähe des IC HT12D sollte aufleuchten und dies liefert Ihnen eine gültige Übertragung (VT), wenn der Sender mit Strom versorgt wird, wenn nicht etwas mit Ihrer Verbindung oder Ihrem RF-TX-RX-Modul nicht stimmt.
Wenn Sie mehr über den Empfängerbereich erfahren möchten, lesen Sie bitte diesen Artikel.
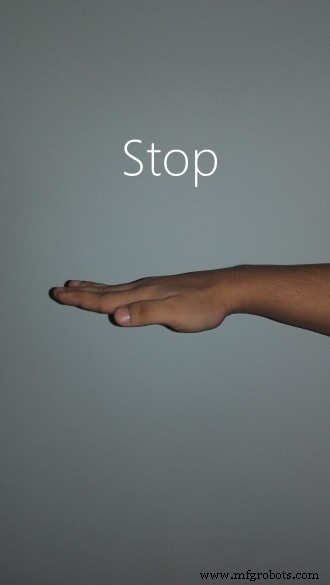
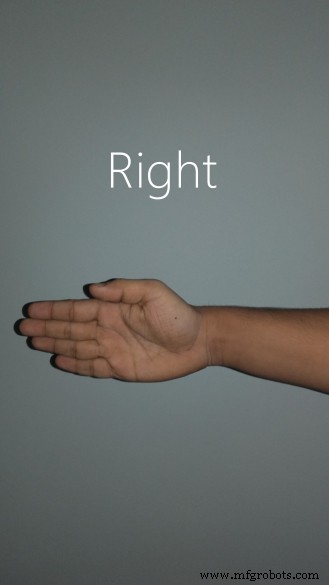
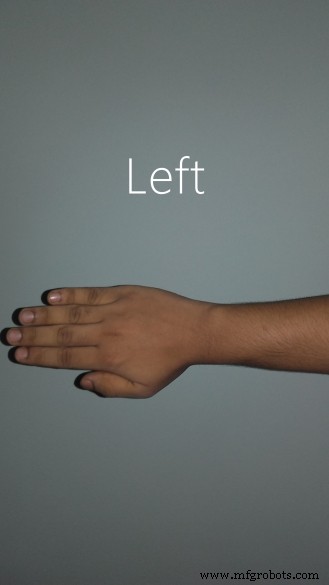
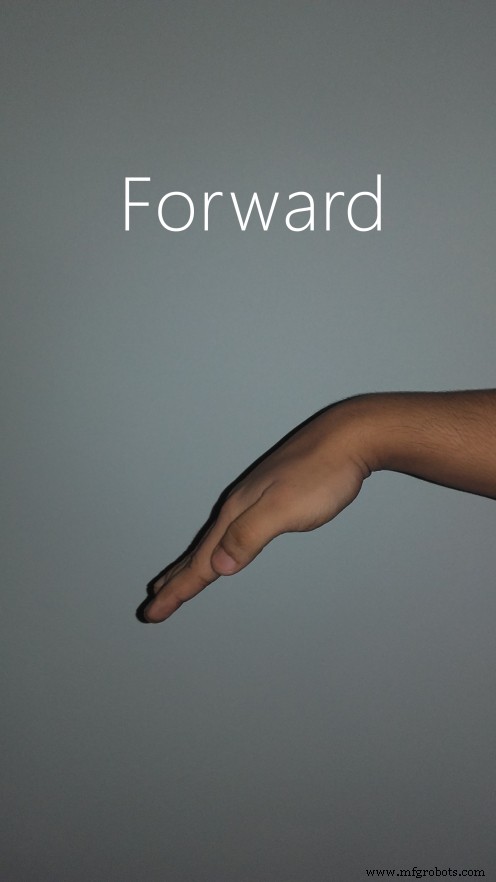
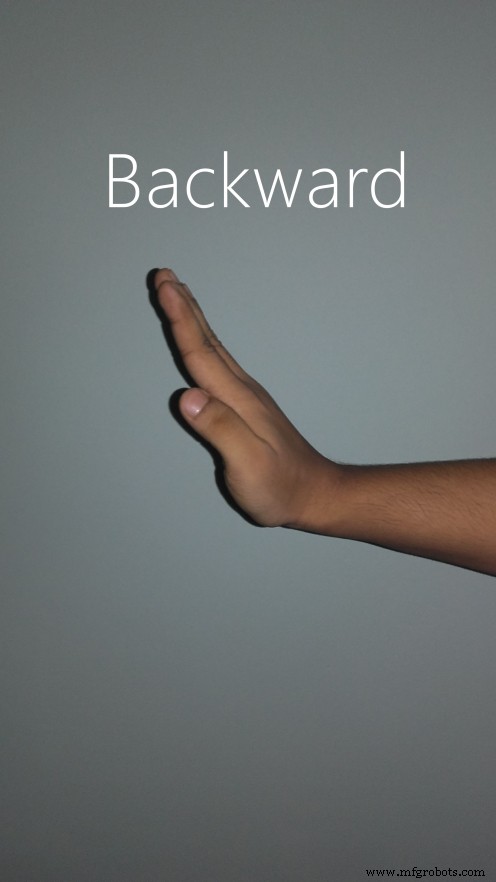
Welche Gesten erkennt der Roboter?
Dieser Roboter ist für die Erkennung von fünf Gestensätzen ausgelegt:vorwärts, rückwärts, links, rechts und Stopp. Sie erhalten eine bessere Vorstellung, wenn Sie sich die Fotos der unten angegebenen Gesten ansehen.
Viel Spaß beim Fahren Ihres Roboters.
Verkleinern Sie es und machen Sie es dauerhaft.
Arduino Uno liegt groß und sperrig in der Hand. Und wenn Sie sich entscheiden, ein weiteres Projekt mit Arduino zu erstellen, müssen Sie das Arduino und alle darauf hergestellten Verbindungen entfernen, und Sie verlieren Ihre alte Arbeit. Ich mache das nicht gerne, also habe ich eine Lösung gefunden, um es dauerhaft zu machen. In diesem Artikel erfahren Sie, wie Sie Ihr Arduino-Projekt verkleinern können.
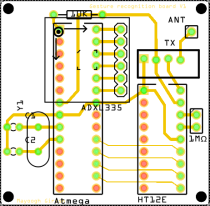
Laden Sie hier das PCB-Layout für die Standalone-Version herunter (Spiegel).
standalone_etch_copper_top_mirror1.pdf standalone_etch_copper_top1.pdfSehen Sie sich dieses Video an, in dem ich den Code auf die Atmega8 MCU übertragen habe. Ich habe nur die Ausgänge der MCU mit LEDs angezeigt.
Besuchen Sie meinen Blog für meine neuen Projekte
Wenn Sie Zweifel haben, hinterlassen Sie hier einen Kommentar. Es ist mein Blog. Ich werde regelmäßig dort nach Feedback suchen und nicht hier.
Herstellungsprozess
- Raspberry Pi Roboter über Bluetooth gesteuert
- Gestengesteuerter Roboter mit Raspberry Pi
- Windows 10 IoT Core:Sprachgesteuerter Roboter
- WLAN-gesteuerter Roboter mit Raspberry Pi
- ROObockey:Ferngesteuerter, zielunterstützter Straßenhockey-Roboter
- Gestengesteuerte interaktive Tischleuchte
- Arduino-Gamecontroller
- Arduino-betriebene Wasserflasche
- Sprachgesteuerter Roboter
- Handgeführte Roboter