


So richten Sie GRBL ein und steuern eine CNC-Maschine mit Arduino
Wenn Sie überlegen oder gerade dabei sind, Ihre eigene CNC-Maschine zu bauen, dann werden Sie höchstwahrscheinlich auf den Begriff GRBL stoßen. In diesem Tutorial lernen wir also, was GRBL ist, wie es installiert und zur Steuerung Ihrer Arduino-basierten CNC-Maschine verwendet wird.
Außerdem lernen wir, wie man den Universal G-Code Sender verwendet, eine beliebte Open-Source-GRBL-Controller-Software.
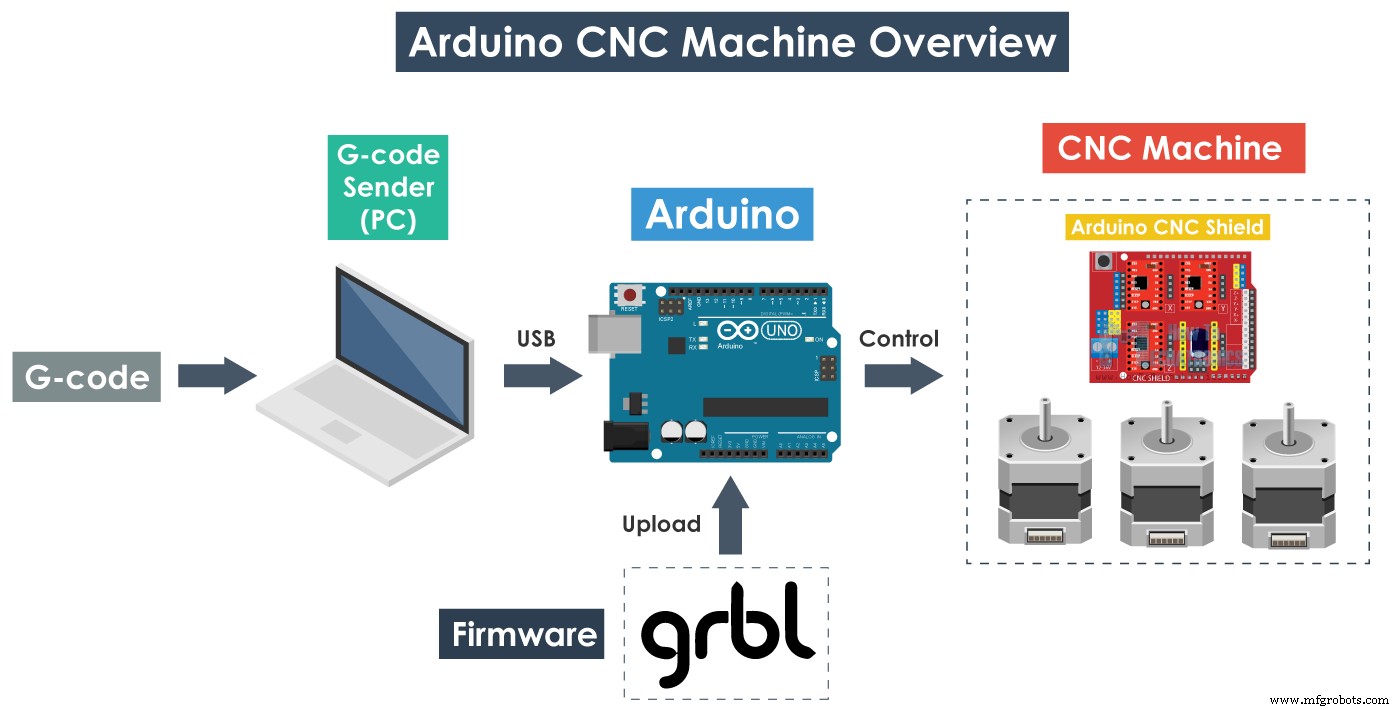
GRBL ist eine Open-Source-Software oder -Firmware, die eine Bewegungssteuerung für CNC-Maschinen ermöglicht. Wir können die GRBL-Firmware einfach auf einem Arduino installieren und erhalten sofort eine kostengünstige Hochleistungs-CNC-Steuerung. Das GRBL verwendet G-Code als Eingabe und gibt die Bewegungssteuerung über das Arduino aus.
Zum besseren Verständnis können wir uns folgendes Diagramm ansehen:
Aus dem Diagramm können wir sehen, wo die GRBL im „großen Bild“ des Arbeitsprinzips einer CNC-Maschine stattfinden. Es ist eine Firmware, die wir installieren oder auf den Arduino hochladen müssen, damit er die Schrittmotoren der CNC-Maschine steuern kann. Mit anderen Worten, die Funktion der GRBL-Firmware besteht darin, den G-Code in eine Motorbewegung zu übersetzen.
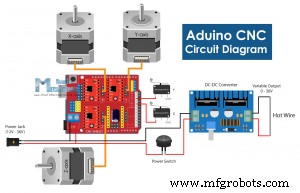
Bitte beachten Sie, dass dies nur die grundlegenden elektronischen Komponenten sind, die wir benötigen, um zu verstehen, wie eine CNC-Maschine funktioniert.
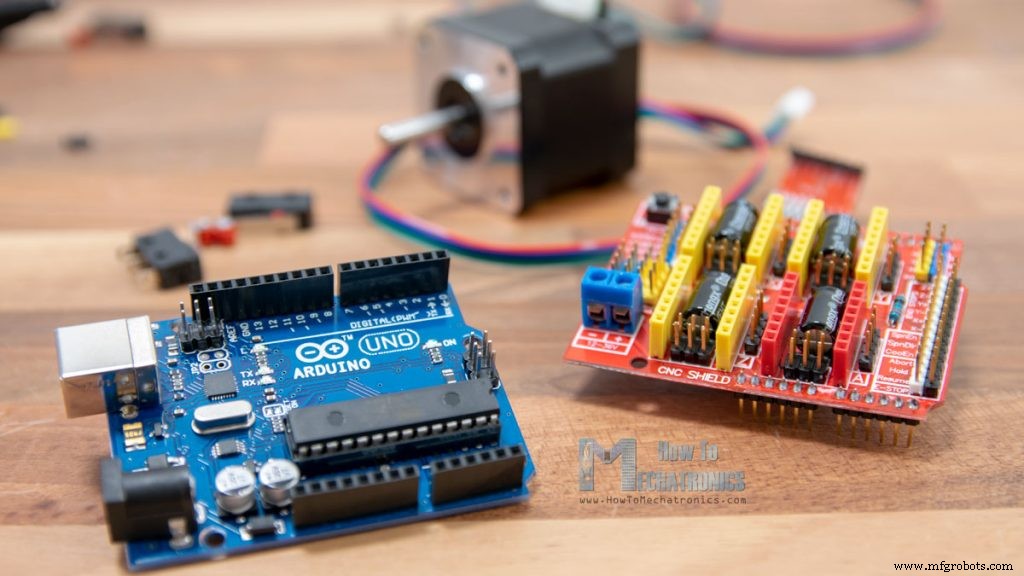
Als Beispiel dafür, wie alles verbunden werden muss, können wir uns meine DIY-CNC-Schaumschneidemaschine ansehen.
Sie können die wichtigsten elektronischen Komponenten, die für den Bau dieser CNC-Maschine benötigt werden, hier überprüfen und erhalten:
Das Hauptwerkzeug dieser CNC-Maschine ist ein heißer Draht, der ein Styropor leicht schmelzen oder durchschneiden und jede gewünschte Form herstellen kann. Für weitere Details, wie ich die Maschine gemacht habe und wie alles funktioniert, können Sie das jeweilige Tutorial lesen.
Trotzdem werden wir diese Maschine in diesem Artikel als Beispiel verwenden, da das gleiche Arbeitsprinzip für jede andere CNC-Maschine gilt, egal ob Fräse oder Laser.
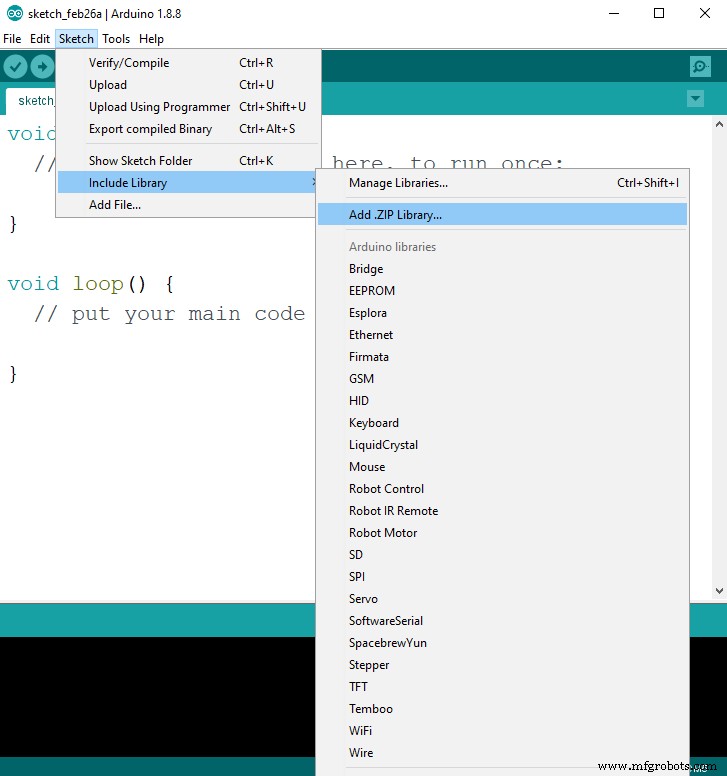
Um die GRBL auf dem Arduino installieren oder hochladen zu können, benötigen wir zunächst die Arduino IDE.
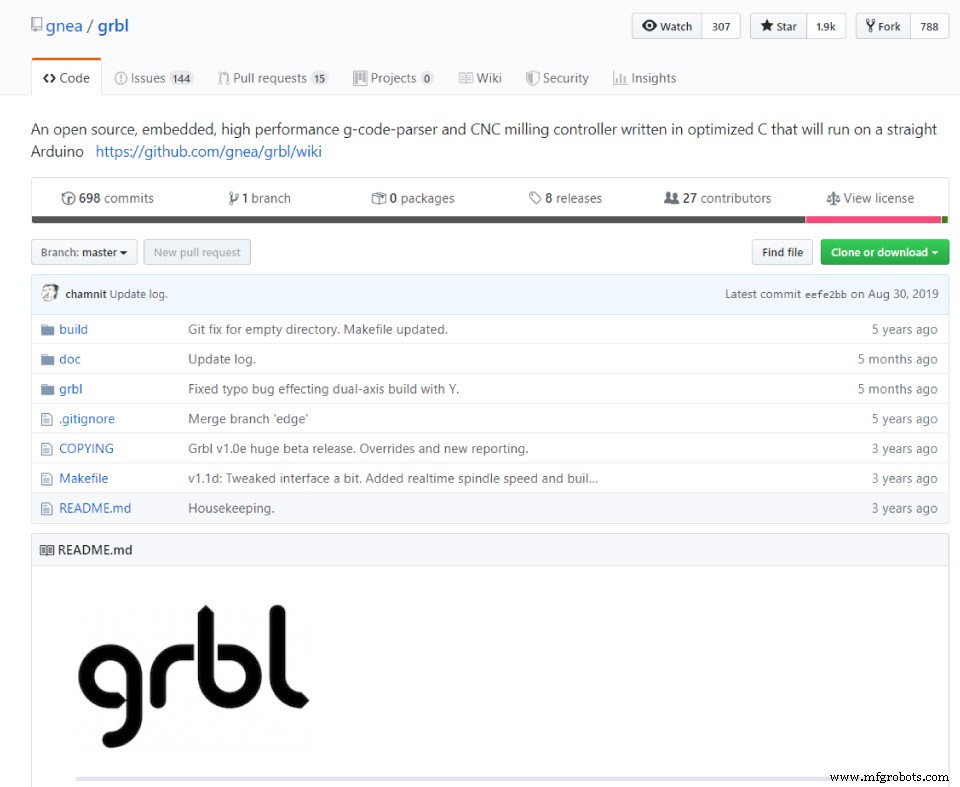
Dann können wir die GRBL-Firmware von github.com herunterladen.
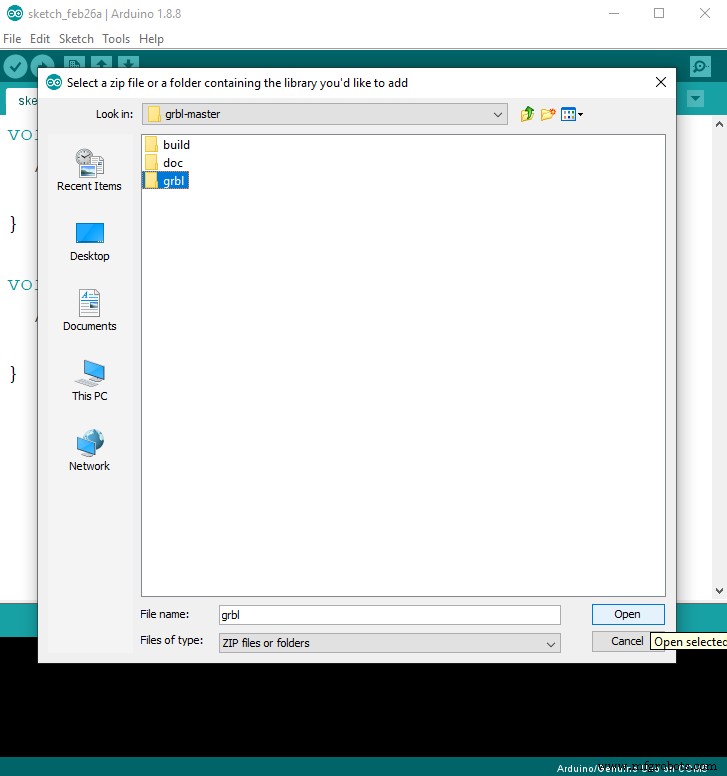
Laden Sie es als .ZIP-Datei herunter und folgen Sie dann diesen Schritten:
An dieser Stelle sollten wir das GRBL an unsere Maschine konfigurieren bzw. anpassen. Das können wir über den Serial Monitor der Arduino IDE machen. Sobald wir den Serial Monitor öffnen, erhalten wir eine Meldung wie „Grbl 1.1h [‚$‘ for help]“. Wenn Sie diese Meldung nicht sehen können, stellen Sie sicher, dass Sie die Baudrate auf 115200 ändern.
Wenn wir „$$“ eingeben, erhalten wir eine Liste mit Befehlen oder aktuellen Einstellungen, die etwa so aussehen:
100 $=250.000 (x, Schritt/mm)
Alle diese Befehle können oder sollten entsprechend unserer CNC-Maschine angepasst werden. Zum Beispiel mit dem ersten Befehl, $100=250.000 (x, Schritt/mm), können wir die Schritte pro mm der Maschine anpassen, oder wir können angeben, wie viele Schritte der Motor machen soll, damit sich unsere X-Achse um 1 mm bewegt.
Ich würde jedoch vorschlagen, diese Einstellungen so zu belassen, wie sie sind. Es gibt eine einfachere Möglichkeit, sie an unsere Maschine anzupassen, indem Sie die Controller-Software verwenden, die wir im nächsten Abschnitt erläutern werden.
Nachdem wir also die GRBL-Firmware installiert haben, weiß unser Arduino jetzt, wie man G-Code liest und wie man die CNC-Maschine entsprechend steuert. Um den G-Code an den Arduino zu senden, benötigen wir jedoch eine Art Schnittstelle oder eine Controller-Software, die dem Arduino mitteilt, was zu tun ist. Tatsächlich gibt es viele sowohl Open-Source- als auch kommerzielle Programme für diesen Zweck. Natürlich bleiben wir bei Open Source, also verwenden wir als Beispiel den Univarsal G-Code Sender.
Für dieses Beispiel verwende ich die Plattformversion 2.0. Sobald wir es heruntergeladen haben, müssen wir die ZIP-Datei extrahieren, in den Ordner „bin“ gehen und eine der ausführbaren „ugsplatfrom“-Dateien öffnen. Dies ist eigentlich ein JAVA-Programm, also müssen wir, um dieses Programm ausführen zu können, zuerst die JAVA-Laufzeitumgebung installieren.
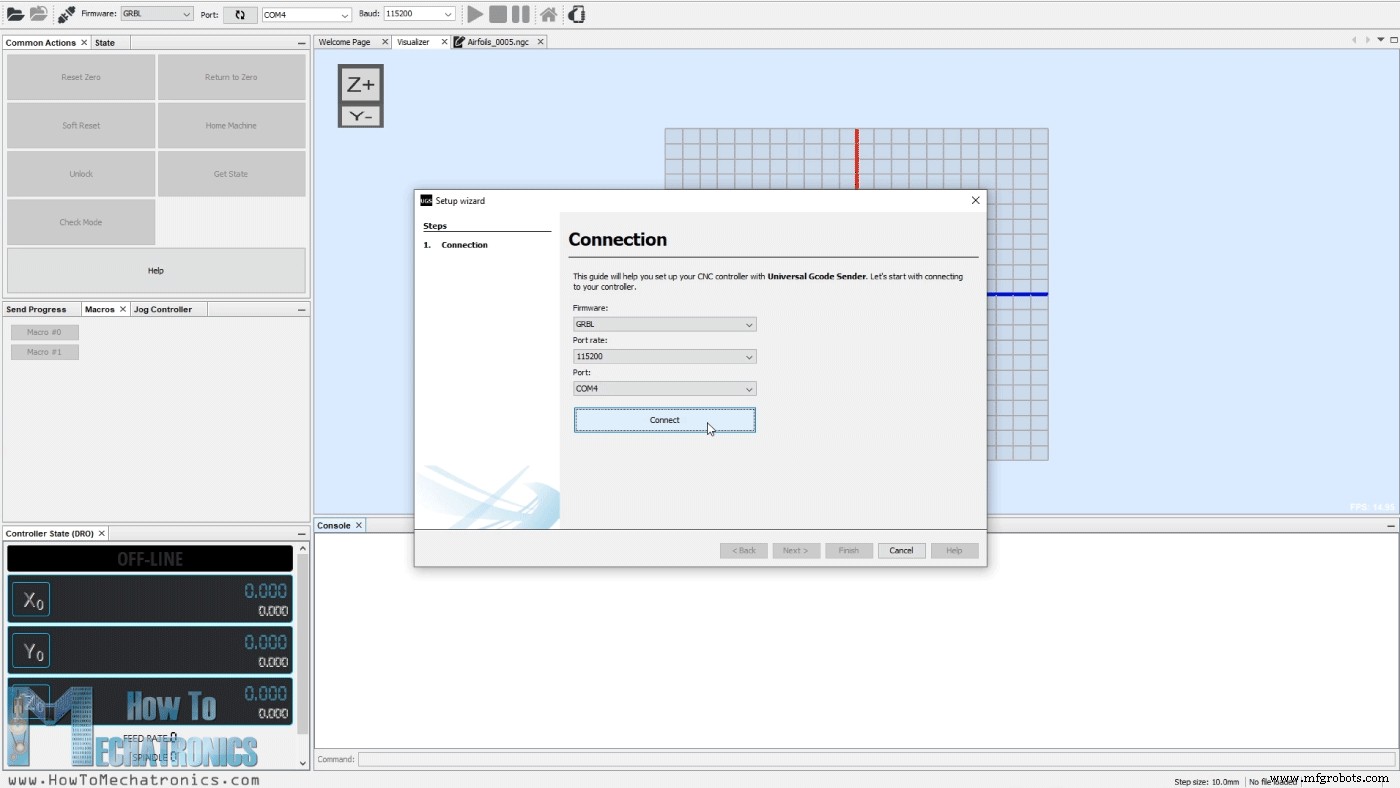
Nachdem wir den universellen G-Code-Sender geöffnet haben, müssen wir zuerst die Maschine konfigurieren oder die zuvor gezeigten GRBL-Parameter konfigurieren. Zu diesem Zweck verwenden wir den UGS-Setup-Assistenten, der viel bequemer ist, als Befehle manuell über den seriellen Monitor der Arduino IDE einzugeben.
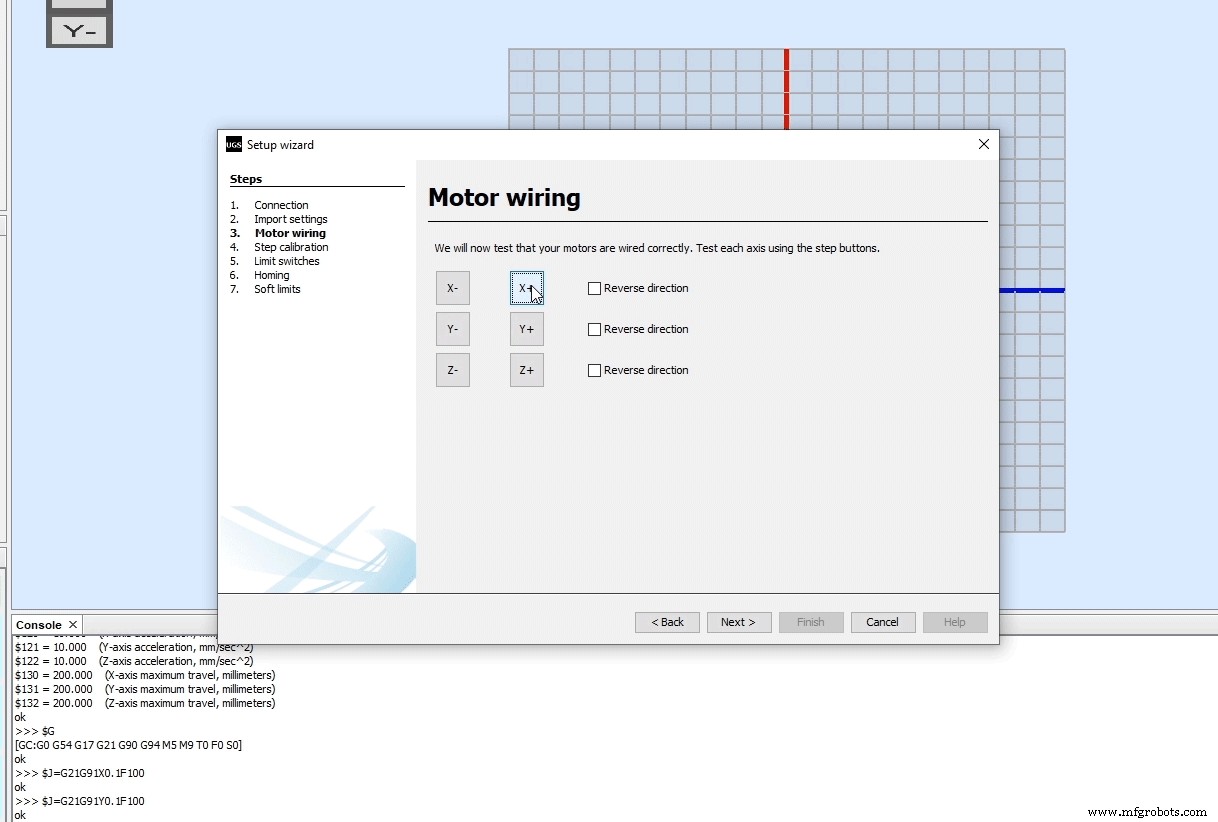
Der erste Schritt hier ist die Auswahl der Baudrate, die 115200 sein sollte, und des Ports, an dem unser Arduino angeschlossen ist. Nachdem wir den Universal G-Code Sender mit dem Arduino verbunden haben, können wir im nächsten Schritt die Bewegungsrichtung der Motoren prüfen.
Bei Bedarf können wir die Richtung über den Assistenten umkehren oder den Anschluss des Motors am Arduino CNC Shield manuell umdrehen.
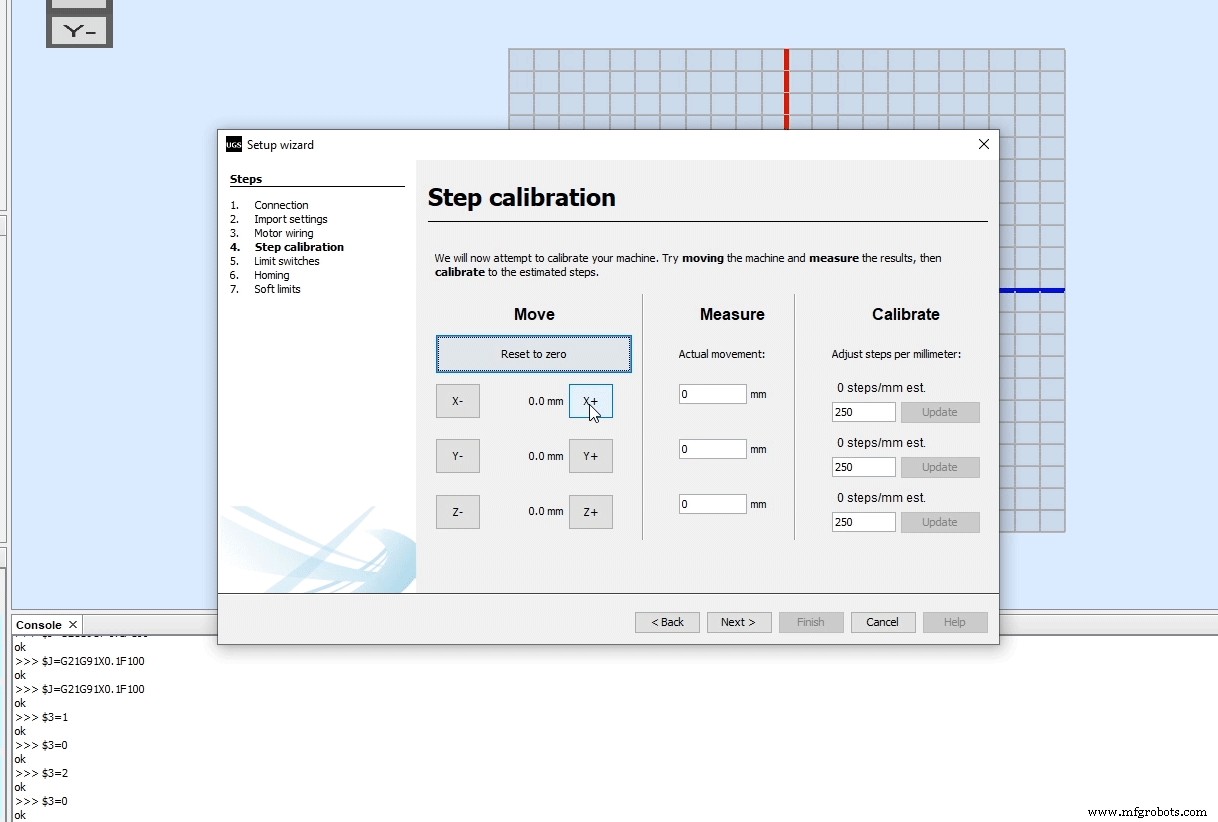
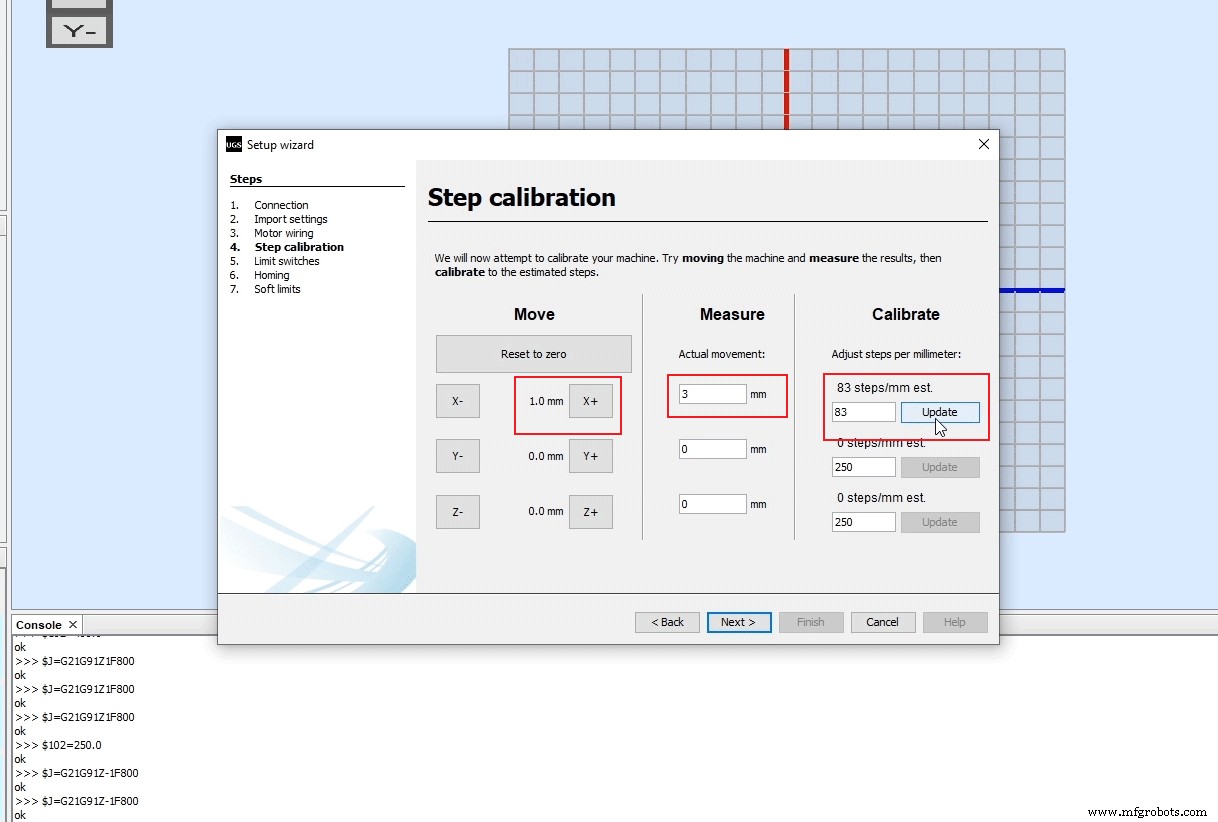
Im nächsten Schritt können wir den zuvor erwähnten Parameter Schritte/mm anpassen. Hier ist es viel einfacher zu verstehen, wie man ihn anpasst, weil der Einrichtungsassistent berechnet und uns sagt, auf welchen Wert wir den Parameter aktualisieren sollten.
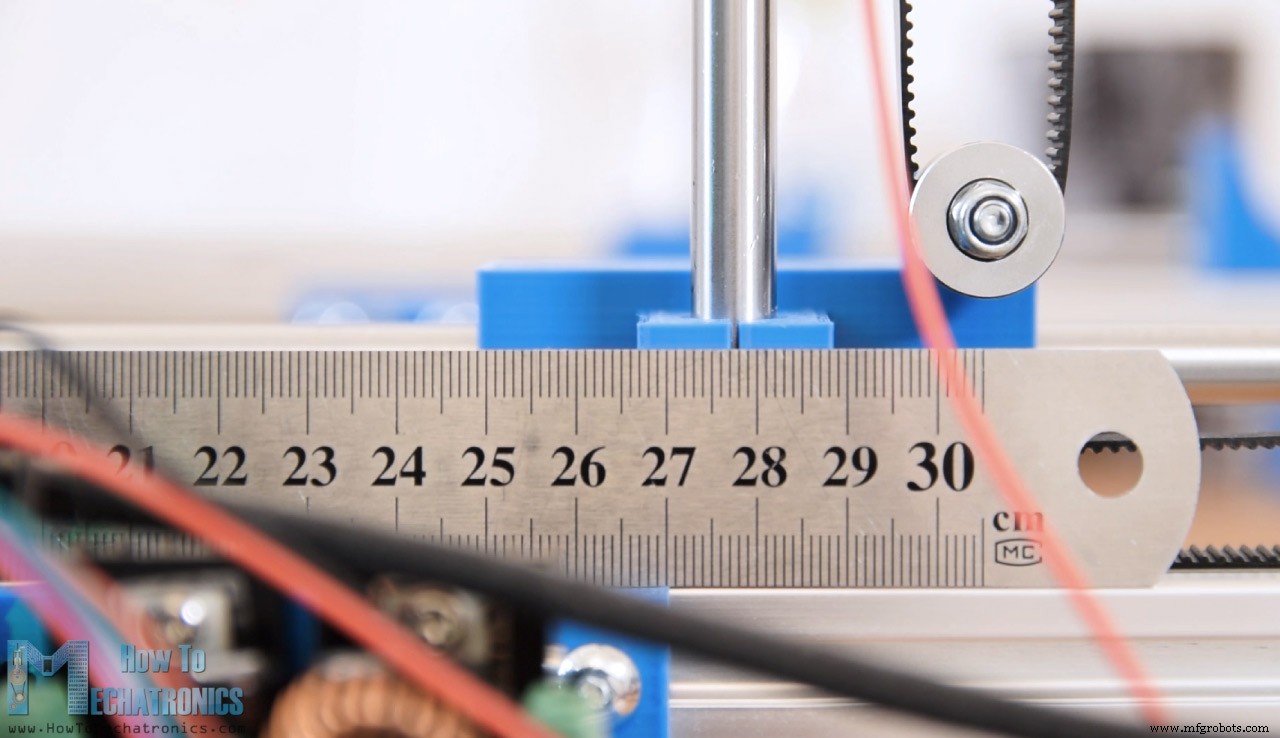
Der Standardwert ist 250 Schritte/mm. Das heißt, wenn wir auf die Schaltfläche „x+“ klicken, macht der Motor 250 Schritte. Abhängig von der Anzahl physikalischer Schritte des Motors, der gewählten Schrittauflösung und dem Übertragungstyp bewegt sich die Maschine nun eine gewisse Strecke. Mit einem Lineal können wir die tatsächliche Bewegung der Maschine messen und diesen Wert in das Feld „Tatsächliche Bewegung“ eingeben. Basierend darauf berechnet der Assistent und teilt uns mit, auf welchen Wert wir den Parameter Schritte/mm ändern sollten.
In meinem Fall bewegte sich die Maschine für die von mir hergestellte DIY-CNC-Maschine um 3 mm. Dementsprechend schlug der Assistent vor, den Parameter Schritte/mm auf einen Wert von 83 zu aktualisieren.
Mit diesem aktualisierten Wert bewegt sich die Maschine jetzt korrekt, 1 mm in der Software bedeutet 1 mm für die CNC-Maschine.
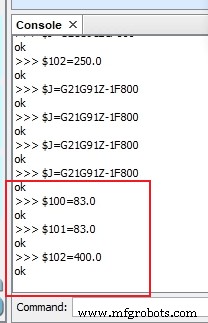
In der UGS-Konsole können wir bei jeder Aktion die ausgeführten Befehle sehen. Wir können feststellen, dass durch die Aktualisierung des Schritte/mm-Parameters das UGS-Programm tatsächlich an den Arduino gesendet hat, oder die GRBL-Firmware den zuvor erwähnten Befehl. Dies war der Standardwert:$100=250.000 (x, Schritt/mm), und jetzt haben wir den Wert auf 83 Schritte pro mm aktualisiert:$100=83.
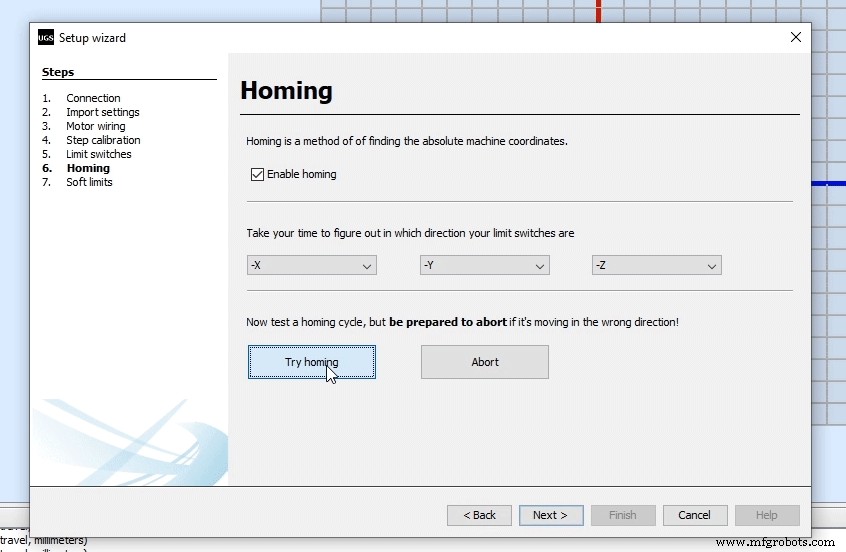
Im nächsten Schritt können wir die Endschalter aktivieren und testen, ob sie richtig funktionieren.
Je nachdem, ob es sich um eine normal offene oder normal geschlossene Verbindung handelt, können wir sie hier auch invertieren.
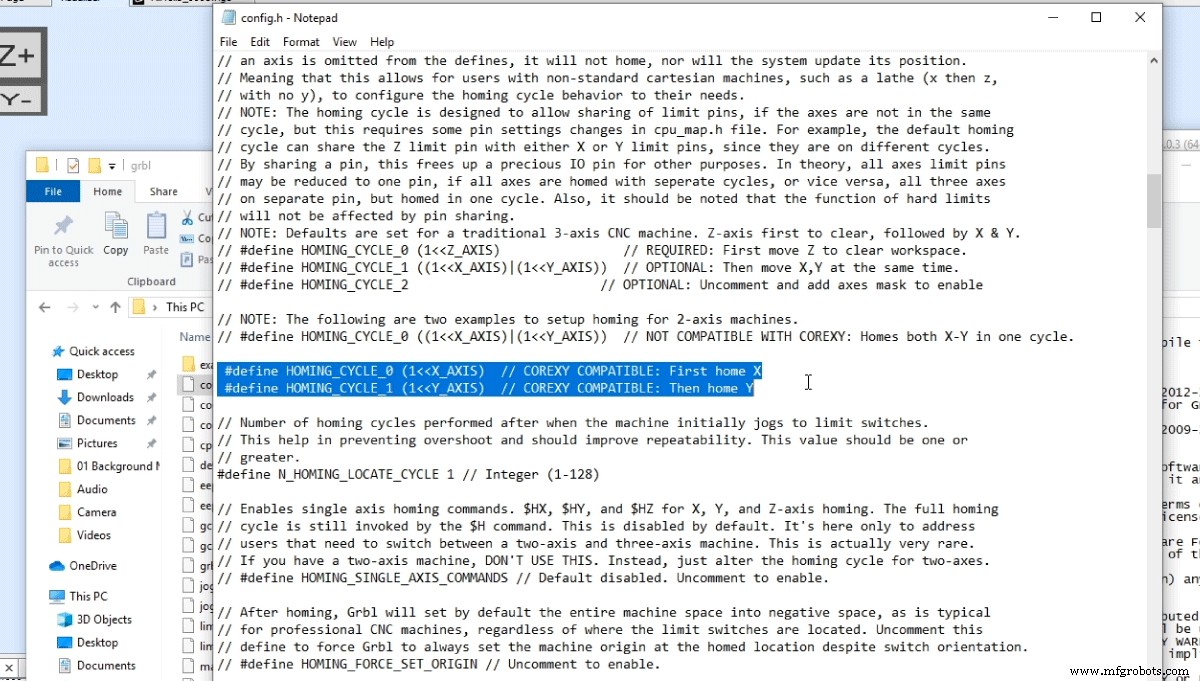
Hier ist es erwähnenswert, dass wir manchmal den Endschalter der Z-Achse deaktivieren müssen. Das war bei meiner DIY-CNC-Schaumschneidemaschine der Fall, wo ich den Z-Achsen-Endschalter nicht brauchte und ihn deaktivieren musste, um die Maschine richtig in die Ausgangsposition bringen zu können. Dazu müssen wir also die Datei config.h bearbeiten, die sich im Arduino-Bibliotheksordner (oder Documents\Arduino\libraries) befindet.
Hier müssen wir die Homing-Cycle-Zeilen finden und den Standardsatz für 3-Achsen-CNC-Maschinen kommentieren und das Setup für 2-Achsen-Maschinen auskommentieren. Damit die Änderungen wirksam werden, müssen wir die Datei speichern und die grblUpload-Skizze erneut auf unser Arduino-Board hochladen.
Trotzdem können wir im nächsten Schritt das Referenzieren der CNC-Bearbeitung entweder aktivieren oder deaktivieren.
Mit der Schaltfläche „Try homing“ beginnt die Maschine, sich auf die Endschalter zuzubewegen. Falls es in die entgegengesetzte Richtung geht, können wir die Richtung leicht umkehren.
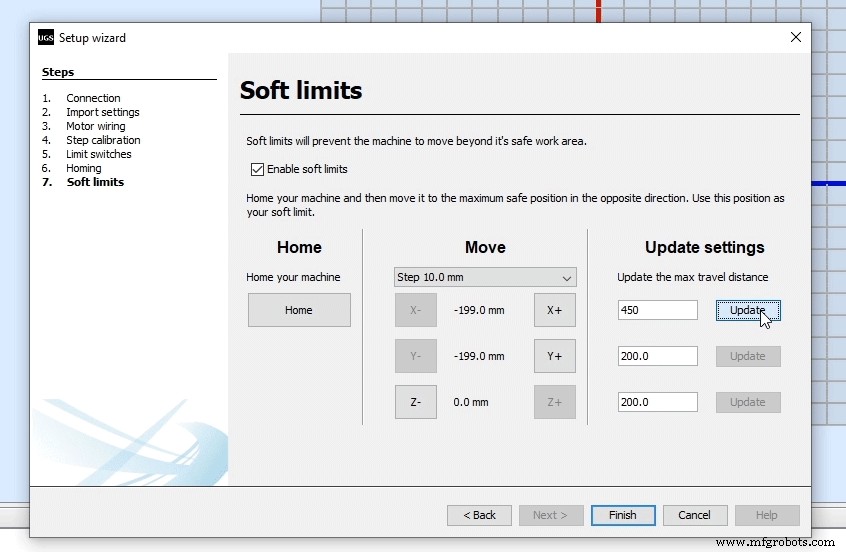
Schließlich können wir im letzten Schritt des Einrichtungsassistenten Softlimits für unsere CNC-Maschine aktivieren.
Die Soft Limits verhindern, dass sich die Maschine über den eingestellten Arbeitsbereich hinaus bewegt.
Dank der GRBL-Firmware und dem Arduino können wir unsere DIY-CNC-Maschine also einfach einrichten und zum Laufen bringen. Natürlich haben wir in diesem Tutorial nur die Grundlagen behandelt, aber ich denke, das war genug, um zu verstehen, wie die Dinge funktionieren und wie wir unsere erste CNC-Maschine zum Laufen bringen.
Natürlich stehen noch viele weitere Einstellungen und Funktionen zur Verfügung, da die GRBL eine wirklich leistungsfähige CNC-Steuerungs-Firmware ist. Die GRBL-Dokumentation erklärt all das im Detail, sodass Sie sie jederzeit auf ihrer Wiki-Seite auf github.com nachlesen können.
Außerdem gibt es viele andere Open-Source-GRBL-Controller-Programme wie den Universal G-Code Sender, und hier sind einige:GRBLweb (Webbrowser), GrblPanel (Windows-GUI), grblControl (Windows/Linux-GUI), Easel (browserbasiert) usw . Sie sollten sie erkunden und herausfinden, welche am besten zu Ihnen passt.Was ist GRBL?
Erforderliche Hardware

So installieren Sie GRBL
GRBL-Konfiguration
101 $=250.000 (y, Schritt/mm)
102 $=3200.000 (z, Schritt/mm)
110 $=500.000 (x max. mm/min)
$111=500.000 (y max rate, mm/min)
$112=500.000 (z max rate, mm/min)
$120=10.000 (x beschleunigung, mm/sek ^2)
121 $=10.000 $ (y-Beschleunigung, mm/s^2)
122 $=10.000 $ (z-Beschleunigung, mm/s^2)GRBL-Controller

So verwenden Sie den universellen G-Code-Sender
Fazit
Herstellungsprozess
- So finden Sie eine gebrauchte CNC-Maschine
- So reinigen Sie eine gebrauchte CNC-Maschine
- Wie erzeuge ich eine G-Code-Datei mit ArtCAM für CNC-Maschinen?
- So vermeiden Sie Probleme mit gebrauchten CNC-Maschinen
- So wählen Sie Ihre CNC-Maschine aus
- Münzprüfer mit Arduino steuern
- Drehmaschine mit CNC
- Wie bearbeitet man Schmuck mit CNC-Bearbeitung?
- Automatisieren von CNC-Maschinenprozessen
- Wie zeichnet sich CNC Swiss Machine beim Drehen aus?