


Die richtige Ausrichtung kann die Leistung des Riemenantriebs steigern
Einführung
Eine Fehlausrichtung ist eine der häufigsten Ursachen für einen vorzeitigen Riemenausfall. Je nach Schweregrad kann eine Fehlausrichtung die Riemenleistung durch zunehmenden Verschleiß und Ermüdung allmählich verringern. Oder es kann einen Gürtel innerhalb von Stunden oder Tagen zerstören. Obwohl die Formen der Fehlausrichtung ziemlich gut verstanden werden können, müssen genaue Messungen und akzeptable Grenzen bestimmt werden, wenn das Wartungspersonal Korrekturmaßnahmen ergreifen soll.
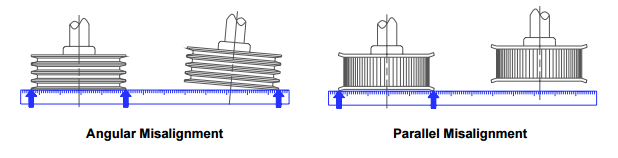
Ausrichtungsarten
Grundsätzlich verringert jeder Winkel- oder Parallelversatz die normale Lebensdauer eines Riemenantriebs.
Winkelversatz führt zu beschleunigtem Riemen-/Scheibenverschleiß und potentiellen Riemenstabilitätsproblemen bei einzelnen Keilriemen. Ein verwandtes Problem, ungleichmäßige Riemen- und Kordbelastung, führt zu ungleicher Lastverteilung innerhalb mehrerer Riemenantriebe und kann zu einem vorzeitigen Ausfall führen. Verbundene Keilriemen können beim Betrieb unter falsch ausgerichteten Bedingungen eine Spaltbandtrennung erleiden. Die Anwendungstechniker von Gates Corporation für Antriebsprodukte weisen darauf hin, dass eine Winkelfehlausrichtung schwerwiegende Auswirkungen auf die Leistung von Synchronriemenantrieben hat.
Symptome wie hohe Riemenführungskräfte, ungleichmäßiger Zahn-/Stirnverschleiß, Kantenverschleiß, hoher Geräuschpegel und potenzielles Zugversagen aufgrund ungleichmäßiger Kordbelastung sind typische Indikatoren für eine Fehlausrichtung. Außerdem reagieren breite Synchronriemen empfindlicher auf Winkelversatz als schmale Riemen.
Eine parallele Fehlausrichtung führt auch zu einem beschleunigten Riemen-/Scheibenverschleiß und potentiellen Riemenstabilitätsproblemen bei einzelnen Keilriemen. Ungleichmäßige Riemen- und Kabelbelastung ist kein so wichtiges Problem wie das Whitepaper von Gates – Die richtige Ausrichtung kann die Leistung des Riemenantriebs bei Winkelversatz erhöhen. Jedoch ist eine parallele Fehlausrichtung bei Keilriemen typischerweise ein größeres Problem als bei Synchronriemen. Dies liegt daran, dass Keilriemen in festen Rillen laufen und nicht wie Synchronriemen in begrenztem Maße zwischen den Flanschen frei schwimmen können.
Eine parallele Fehlausrichtung ist bei Synchronriemenantrieben im Allgemeinen kein kritisches Problem, solange der Riemen nicht zwischen gegenüberliegenden Flanschen eingeklemmt oder eingeklemmt wird und solange der Riemen vollständig auf beiden Kettenrädern läuft.
Synchron-Kettenräder sind mit Zahnbreiten größer als die Riemenbreiten konstruiert, um Probleme im Zusammenhang mit Toleranzakkumulation zu vermeiden und einen kleinen Betrag (Bruchteile eines Zolls) des Montageversatzes zu ermöglichen.
Solange die Breite zwischen gegenüberliegenden Kettenradflanschen die Riemenbreite überschreitet, richtet sich der Riemen automatisch richtig aus, da er auf beiden Kettenrädern eine bequeme Betriebsposition sucht. Es ist normal, dass ein Synchronriemen während des Betriebs mindestens einen der Kettenradflansche im System leicht berührt. Synchronriemen laufen selten in der Mitte der Kettenräder, ohne mindestens einen Flansch zu berühren.
Messfehler
Die Ingenieure von Gates sagen, dass das beste Werkzeug zum Messen von Fehlausrichtungen ein Laser-Ausrichtungsgerät ist. Wenn jedoch eines nicht verfügbar ist, ist das nächstbeste Werkzeug je nach Achsabstand des Antriebs ein Lineal wie eine lange Wasserwaage, ein Aluminiumstrang oder ein Lineal. Das Laserwerkzeug und das Lineal werden verwendet, um die Ausrichtung einer Seilscheiben- oder Kettenradfläche in Bezug auf die andere zu projizieren.
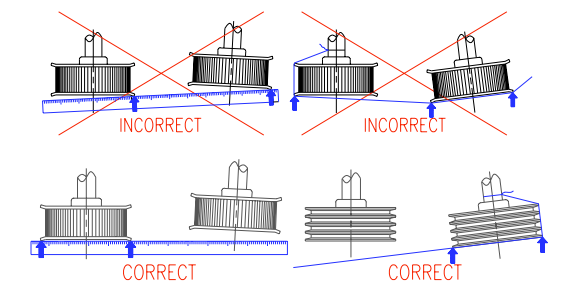
Bei der Vorbereitung der Messung der parallelen Fehlausrichtung muss der Wartungstechniker zuerst überprüfen, ob die Kanten von beiden Riemenscheiben und Kettenrädern gleich dick sind, oder den Dickenunterschied quantifizieren. Es ist wichtig, die Rillen der Riemenscheiben oder Kettenradflächen direkt aufeinander auszurichten und nicht nur die Außenflächen der Riemenscheiben oder Kettenräder (Flansche). Es kann erforderlich sein, Riemenscheiben oder Kettenräder mit zueinander versetzten Außenflächen zu montieren, um die Nuten oder Kettenradflächen richtig auszurichten.
Auch die Kettenradflansche sollten auf Rundlauf geprüft werden. Ein verbogener Flansch kann zu Fehlmessungen führen, wenn das Laserwerkzeug oder das Lineal während des Prüfvorgangs an der Außenkante des beschädigten Flansches anliegt.
Um zu bestimmen, wie viel Fehlausrichtung akzeptabel ist und wann sie übermäßig wird, muss die Ausrichtung zuerst gemessen, quantifiziert und dann mit den Empfehlungen des Riemenherstellers für den jeweiligen Riementyp verglichen werden. Diese Empfehlungen finden Sie in den Handbüchern zur Antriebskonstruktion.
Quantifizierung der Fehlausrichtung
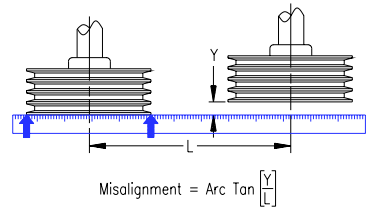
Die Fehlausrichtung kann entweder mathematisch quantifiziert oder mit einigen allgemeinen Faustregeln verglichen werden, um schnellere und einfachere Ergebnisse zu erzielen. Bei Verwendung eines Lineals zum Projizieren der Ebene der Außenfläche von Seilscheibe oder Kettenrad Nr. 1 in Bezug auf Seilscheibe oder Kettenrad Nr #2 über den Durchmesser.
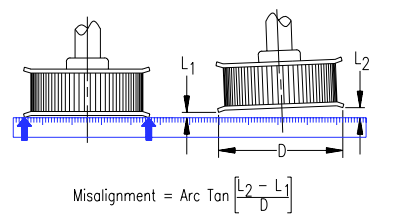
Der Winkel der parallelen Fehlausrichtung kann als Differenz des Spiels zwischen dem Lineal und den Außenflächen der beiden Seilscheiben oder Kettenräder über den Trennungsabstand quantifiziert werden.
Der für Keilriemen empfohlene zulässige Gesamtversatz beträgt im Allgemeinen 1/2 Grad. Während einzelne Keilriemen dafür bekannt sind, größere Fehlausrichtungen zu bewältigen, bevor sie instabil werden, maximiert die Einhaltung der Fehlausrichtung innerhalb von 1/2 Grad die Lebensdauer des Riemens.
Der empfohlene Gesamtversatz für Synchron-, Urethan-60-Grad-Riemen (Polyflex) und Poly-V-Riemen (Micro-V) beträgt 1/4 Grad. Diese Antriebe sind weniger tolerant gegenüber Fluchtungsfehlern als herkömmliche Keilriemenantriebe und müssen genauer ausgerichtet werden.
Bei der Bestimmung, ob ein V-Antriebssystem innerhalb dieser Empfehlungen ausgerichtet ist, müssen sowohl die Winkel- als auch die Parallelverlagerung einzeln gemessen und quantifiziert und dann addiert werden. Die Gesamtsumme von Winkel- und Parallelversatz kann dann mit den Empfehlungen des Riemenherstellers für die jeweilige Antriebsart verglichen werden.
Wie erörtert, werden Kettenräder für Synchronriemen mit Zahnbreiten größer als die Riemenbreite hergestellt, um Riemenpassungsprobleme durch Toleranzansammlungen zu vermeiden. Diese zusätzliche Zahnkranzflächenbreite ermöglicht dem Riemen, frei über die Zahnkranzflächen zu gleiten.
Da Synchronriemen besonders empfindlich gegen Einklemmen oder Einklemmen zwischen gegenüberliegenden Kettenradflanschen sind, müssen die Kettenräder so eingebaut werden, dass auf beiden Seiten zwischen der Riemenkante und den Flanschen Spiel vorhanden ist. Wenn ein Spiel zwischen gegenüberliegenden Kettenradflanschen und den Kanten des Riemens vorhanden ist, muss der Parallelversatz nicht quantifiziert und zum Winkelversatz addiert werden.
Faustregeln
Wartungstechniker finden es möglicherweise nicht immer praktisch oder möglich, die Gesamtfehlausrichtung in einem System genau zu berechnen, während sie feststellen, ob es in akzeptabler Ausrichtung ist. Es ist auch schwierig, kleine Bruchteile eines Winkels wie 1/2 und 1/4 Grad zu visualisieren. Diese lassen sich mit den folgenden Faustregeln anschaulicher darstellen:
Für Keilriemenantriebe:
1/2-Grad-Winkel =ungefähr 1/10 Zoll pro Fuß zurückgelegter Strecke.
Für Synchron-, 60-Grad-Winkel- und Keilrippenantriebe:
1/4-Grad-Winkel =ungefähr 1/16-Zoll pro Fuß zurückgelegter Strecke.
Diese Regeln können verwendet werden, um das Ausmaß der Winkel- und Parallelverschiebung visuell abzuschätzen, anstatt tatsächliche numerische Werte berechnen zu müssen.
Damit beispielsweise ein Synchronriemenantrieb innerhalb der Empfehlungen des Riemenherstellers für den Winkelversatz liegt, sollte der Abstand von der Außenfläche des Kettenrads zum Lineal um nicht mehr als 1/16 Zoll über einen Durchmesser von 12 Zoll abweichen .
Bei einem Kettenrad mit einem Durchmesser von 6 Zoll sollte dieser Unterschied nicht mehr als 1/32 Zoll betragen. Wenn die Differenz größer ist oder der berechnete Winkel den empfohlenen Maximalwert von 1/4 Grad überschreitet, sollte der Antrieb neu ausgerichtet werden.
Schlussfolgerung
Eine Fehlausrichtung kann ein Hindernis für eine zufriedenstellende Synchron- und Keilriemenantriebsleistung sein. In komplexen Antriebsanwendungen ist sie in vielen Fällen nicht ohne weiteres erkennbar. Wartungstechniker sollten auch zugehörige Komponenten wie Halterungen und Plattformen auf korrekte Konstruktion und Platzierung überprüfen. Diese Teile müssen stark genug sein, um den vom Riementrieb ausgeübten Spitzenkräften standzuhalten, ohne sich zu verbiegen oder zu biegen.
Lesen Sie hier den Originalartikel.
Bei J/E sind wir autorisierter Distributor für Gates. Wir führen Produkte wie Riemen, Schläuche und Kettenräder. Wenn Sie Fragen zu einem unserer Produkte haben, besuchen Sie unsere Kontaktseite oder senden Sie uns eine E-Mail an [email protected]
Gerätewartung und Reparatur
- Erhöhte Betriebszeit durch richtige Riemenwartung
- Dienstprogramme können die finanzielle Leistung von MRO-Funktionen verbessern
- Wie eine angemessene Schulung die Zuverlässigkeit erhöhen kann
- Wie die eSIM das Wachstum für Betreiber fördern kann
- Festplatte kann als Mikrofon für Spionage verwendet werden
- Kann Fertigungsrobotik die Sicherheit der Mitarbeiter erhöhen?
- Laserausrichtung bei rotierenden Geräten:Fehlausrichtung und mehr
- IoT in der Öl- und Gasindustrie zur Steigerung der Geschäftsleistung
- Welche Rolle spielt ein Riemenantrieb in Industriemaschinen?
- Die Bedeutung der richtigen Ausrichtung für die Leistung von rotierenden Maschinen