


Inverse Kinematik in der Robotik:Was Sie wissen müssen
Was ist inverse Kinematik?
Wie viel müssen Sie darüber wissen, um das Beste aus Ihrem Roboter herauszuholen?
Inverse Kinematik für die Robotik ist ein riesiges und oft komplexes Thema. Abhängig von Ihrem Projekt müssen Sie sich möglicherweise sehr detailliert damit auskennen oder mit Grundkenntnissen auskommen.
Hier sind die wesentlichen Informationen, die Sie über inverse Kinematik für die Robotik wissen müssen.
Was ist inverse Kinematik?
Inverse Kinematik ist ein mathematischer Prozess, der zur Berechnung der Gelenkpositionen verwendet wird, die erforderlich sind, um den Endeffektor eines Roboters in einer bestimmten Position und Ausrichtung (auch bekannt als seine „Pose“) zu platzieren. Eine zuverlässige inverse kinematische Lösung ist notwendig, um einen Roboter für die Ausführung von Aufgaben zu programmieren.
Es ist wichtig, sich über die Unterschiede zwischen der inversen Kinematik und der Vorwärtskinematik des Roboters im Klaren zu sein.
Die Vorwärtskinematik bestimmt, wo sich der Endeffektor befindet, wenn die Gelenke auf eine bestimmte Position eingestellt werden. Es gibt immer nur eine Lösung für die kinematische Vorwärtsgleichung. Wenn die Gelenke auf eine bestimmte Position eingestellt werden, landet der Endeffektor immer an der gleichen Stelle.
Bei der inversen Kinematik gibt es oft mehrere verschiedene Lösungen und mehrere Ansätze zur Berechnung der inversen Kinematik.
Warum wir inverse Kinematik in der Robotik brauchen
Wenn wir keine inverse Kinematik hätten, wäre die Roboterprogrammierung extrem schwierig … wenn nicht unmöglich.
Wenn Sie möchten, dass sich der Endeffektor Ihres Roboters an eine bestimmte Stelle in seinem Arbeitsbereich bewegt, ist es sinnvoll, dass Sie Ihre gewünschte Pose in das Programm eingeben.
Aber Sie können einem Roboter nicht einfach sagen, dass er zu Ihrem gewünschten X, Y und Z gehen soll Koordinaten und erwarten, dass der Roboter Ihre Anweisungen versteht… nicht ohne inverse Kinematik.
Die meisten Industrieroboter sind aus mehreren unabhängig voneinander steuerbaren Knickgelenken aufgebaut. Jedes Gelenk ist mit einem oder mehreren der anderen Gelenke verbunden, manchmal in komplexen Konfigurationen. Am Ende der gesamten „kinematischen Kette“ ist der Endeffektor angebracht. Wenn Sie ein beliebiges Gelenk bewegen, wirkt sich dies auf verschiedene Weise auf die Pose des Endeffektors aus.
Das bedeutet, dass es keine einfache, direkte Beziehung zwischen der Position des Endeffektors und einem bestimmten Gelenk gibt.
Wenn Sie beispielsweise möchten, dass sich der Endeffektor des Roboters um 1 mm linear entlang der Z-Achse bewegt, müssen Sie möglicherweise alle Gelenke um einen anderen Betrag bewegen.
Schließlich berechnen inverse Kinematikalgorithmen die exakte Position aller Gelenke des Roboters, die erforderlich sind, um die gewünschte Pose des Endeffektors zu erreichen.
So finden Sie die inverse Kinematik eines Roboterarms
Wenn Sie etwas über inverse Kinematik für die Robotik recherchieren, werden Sie oft Seiten über Seiten mit Gleichungen, Formeln und Algorithmusbeschreibungen finden. Denn die Berechnung inverser Kinematik ist ein etabliertes Gebiet in der Robotikforschung. Nicht viele Leute sprechen außerhalb des Forschungsbereichs über inverse Kinematik (außer 3D-Animatoren).
Wenn wir jedoch Roboter für industrielle Anwendungen verwenden, gibt es zwei grundlegende Optionen, um eine Lösung mit inverser Kinematik zu finden:
- Sie können die gesamte mathematische und Programmierarbeit selbst erledigen, um einen inversen kinematischen Solver für Ihren spezifischen Roboter zu erstellen.
- Sie können einen vorhandenen inversen kinematischen Solver für Ihren speziellen Roboter verwenden, der „out of the box“ funktioniert.
Welche davon Sie wählen, hängt von Ihrer individuellen Situation ab.
Wenn Sie den Roboter selbst gebaut haben – d. h. ihn von Grund auf neu gebaut haben, indem Sie Motoren und mechanische Verbindungen miteinander verbunden haben – müssen Sie wahrscheinlich Option 1 wählen.
Wenn Sie einen Industrieroboter eines Roboterherstellers verwenden, ist Option 2 fast immer schneller und einfacher.
Die schwierige Methode:Erstellen Sie einen Solver für inverse Kinematik
Wenn Sie sich dafür entscheiden, Ihren eigenen inversen kinematischen Solver zu erstellen, machen Sie sich bereit für ernsthafte Programmierung!
Es gibt 2 grundlegende Ansätze zur Berechnung der inversen Kinematik:
1. Analytische inverse kinematische Lösungen
Ein analytischer inverser kinematischer Löser wird in der Lage sein, die gewünschte Endeffektor-Pose einzunehmen und (fast) sofort die erforderlichen Gelenkpositionen auszuspucken.
Dies liegt daran, dass die kinematische Kette des Roboters „unter der Haube“ auf eine geschlossene Ausdrucksform reduziert wurde – für jede Pose des Endeffektors gibt es eine mathematische Definition der erforderlichen Gelenkpositionen.
Obwohl Sie den Ausdruck in geschlossener Form selbst (von Hand) generieren könnten, ist dies normalerweise nicht erforderlich. Heutzutage macht die IKFast-Bibliothek diese Aufgabe viel einfacher als früher.
2. Numerische/Iterative Kinematiklöser
Nicht alle Roboter haben eine analytische inverse kinematische Lösung. Wenn die kinematische Struktur des Roboters komplex oder ungewöhnlich ist, besteht die einzige Option darin, einen numerischen Solver für inverse Kinematik zu verwenden.
Darüber hinaus gibt es in einer numerischen Lösung keinen eindeutigen Ausdruck in geschlossener Form. Wenn Sie stattdessen Ihre gewünschte Endeffektorposition eingeben, arbeitet ein iterativer Algorithmus auf eine Lösung für die erforderlichen Gelenkpositionen hin, indem er sie als Optimierungslösung behandelt.
Bei jeder Iteration gibt der Algorithmus einige Gelenkpositionen in die Vorwärtskinematikgleichung des Roboters ein, um herauszufinden, wo der Endeffektor landet. In der nächsten Iteration verwendet es diese Informationen, um die Gelenkpositionen weiter zu optimieren. Dadurch wird der Endeffektor allmählich in die gewünschte Pose bewegt.
Aufgrund dieses iterativen Ansatzes sind numerische inverse kinematische Lösungen langsamer als analytische Lösungen.
Die einfache Methode:Verwenden Sie einen bewährten inversen Kinematik-Solver
Das Erstellen Ihres eigenen Lösers für inverse Kinematik ist eine gute intellektuelle Übung, wenn Sie an der Universität studieren oder Ihren eigenen Roboter von Grund auf neu bauen.
Wenn Sie Ihren Roboter jedoch nur in einer Produktionsumgebung verwenden möchten, ist es unwahrscheinlich, dass Sie einen eigenen inversen Kinematik-Löser erstellen müssen.
Es ist viel einfacher und schneller, einfach einen vorhandenen Solver zu verwenden, der bereits in Ihre Roboterprogrammierumgebung integriert ist.
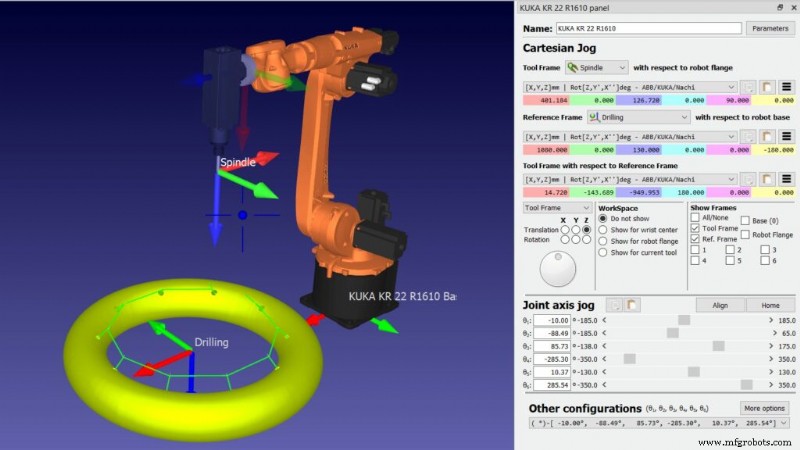
Alle Roboter in der Roboterbibliothek von RoboDK verfügen über eigene inverse kinematische Solver. Dadurch können Sie sofort mit der Programmierung beginnen, ohne jemals darüber nachdenken zu müssen.
Die meisten unserer Solver sind vorgenerierte Analyselösungen, die in der Roboterdatei enthalten sind. Einige der komplexeren Roboter in der Bibliothek verwenden jedoch numerische Löser. Selbst bei den numerischen Lösern ist die reduzierte Berechnungsgeschwindigkeit mit RoboDK kein Problem, da Sie Ihren Roboter offline programmieren, bevor Sie Ihr Programm an den Roboter selbst senden.
Erstellen Sie schließlich nur dann Ihren eigenen inversen kinematischen Solver, wenn Sie wirklich müssen.
Wenn nicht, können Sie Ihre Zeit viel besser damit verbringen, das Roboterprogramm für Ihre Aufgabe zu erstellen und es schneller in Produktion zu bringen.
Welche Fragen haben Sie zur inversen Kinematik in der Robotik? Erzählen Sie es uns in den Kommentaren unten oder beteiligen Sie sich an der Diskussion auf LinkedIn, Twitter, Facebook, Instagram oder im RoboDK-Forum.
Industrieroboter
- Vorausschauende Wartung – Was Sie wissen müssen
- Was Sie über die CMMC-Zertifizierung wissen müssen
- Was Sie über die Leiterplattenbestückung wissen müssen
- Präzise Metallbearbeitung:Was Sie wissen müssen
- Was Sie über den Overmolding-Prozess wissen müssen
- Was Sie über den Export von Maschinen wissen müssen
- AC- und DC-Motoren:Was Sie wissen müssen
- Was Sie über dynamisches Bremsen wissen müssen
- Was Sie über hydraulische Hilfsbremsen wissen müssen
- Was Sie über industrielle Reibmaterialien wissen müssen