


Hall-Effekt-Magnetdesign:Frontal- und Slide-by-Konfigurationen
Erfahren Sie, wie der Hall-Effekt in Positionserfassungsanwendungen verwendet wird.
Die Positionserfassung ist eine der wichtigsten Anwendungen von Hall-Effekt-Sensoren. Ein Hall-Effekt-Gerät misst die Stärke des angelegten Magnetfelds. Um die Position eines Objekts zu erkennen, können wir einen kleinen Permanentmagneten an dem Objekt anbringen. Wenn das Objekt den Magneten relativ zum Hall-Gerät bewegt, ändert sich die Stärke des Magnetfelds. Diese Änderungen können vom System verarbeitet werden, um die Objektposition zu erkennen.
Es gibt mehrere verschiedene Sensor-Magnet-Konfigurationen, die in Positionserfassungsanwendungen auf Hall-Effekt-Basis verwendet werden können. Bei jeder Sensor-Magnet-Konfiguration wird der Magnet auf unterschiedliche Weise relativ zum Sensor bewegt. Dies beeinflusst das vom Hall-Gerät erfasste Magnetfeld und ändert die Systemeigenschaften.
In diesem Artikel werfen wir einen Blick auf einige der grundlegenden magnetischen Konfigurationen, die bei der Hall-Effekt-basierten Positionserfassung verwendet werden, und diskutieren ihre Vor- und Nachteile.
Frontalkonfiguration
Die einfachste magnetische Konfiguration ist die in Abbildung 1 gezeigte Frontalsensorik.
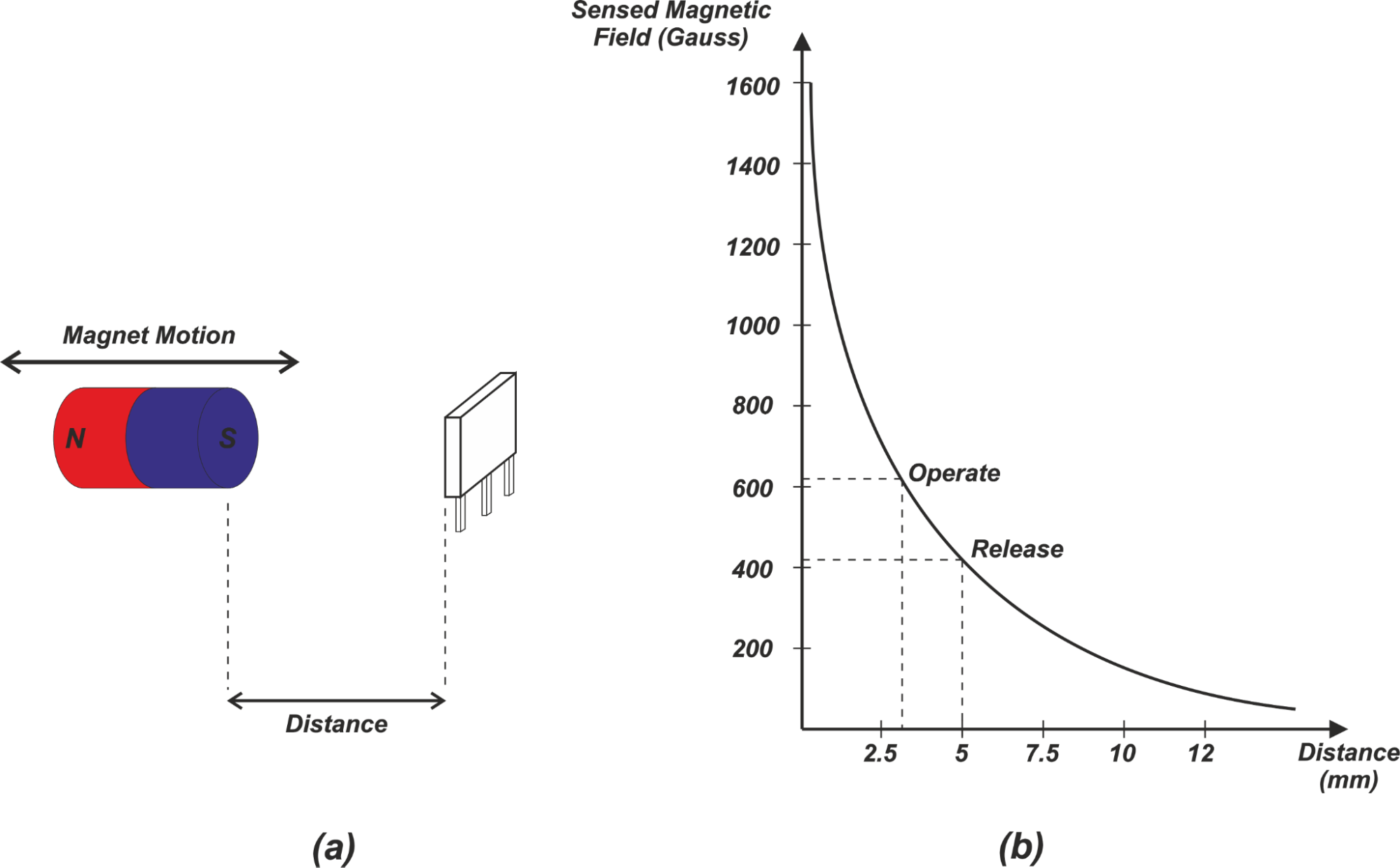
Abbildung 1.
Dabei wird der Südpol des Magneten direkt auf den Sensor zu oder von diesem weg bewegt. Wenn sich der Magnet sehr nahe am Sensor befindet, verläuft eine größere Anzahl der magnetischen Flusslinien durch die aktive Fläche des Sensors. Wenn sich der Südpol des Magneten jedoch vom Sensor wegbewegt, nimmt die Magnetfeldstärke schnell ab, wie in Abbildung 1(b) gezeigt.
Beachten Sie, dass die Gauß-Abstands-Kurve manchmal als Flusskarte der Struktur bezeichnet wird. Die magnetische Flussdichte der frontalen Konfiguration ist umgekehrt proportional zum Quadrat des Abstands zwischen Magnet und Sensor. Die in Abbildung 1(b) angegebenen Flusswerte können mit einem Magneten von ca. 30 mm Länge und einem Durchmesser von ca. 6 mm erzeugt werden.
Anwendung:Erkennen der Anwesenheit eines Objekts
Die Frontalkonfiguration kann mit einem digitalen (ON/OFF) Hall-Effekt-Sensor verwendet werden, um das Vorhandensein eines Objekts zu erkennen. Angenommen, die magnetischen Betriebs- und Auslösepunkte des Sensors sind wie in Abbildung 1(b) gezeigt. Der magnetische Arbeitspunkt gibt den Pegel eines verstärkenden Magnetfelds an, bei dem sich ein Hall-Gerät einschaltet. Der magnetische Auslösepunkt entspricht dem schwächenden Magnetfeld, bei dem das Hall-Gerät abschaltet.
Nähert sich der Magnet dem Sensor, wird die magnetische Feldstärke immer größer. In einem Abstand von ca. 3,1 mm entspricht das erfasste Magnetfeld dem magnetischen Arbeitspunkt (in unserem Beispiel ca. 620 Gauss), der den Sensor einschaltet. Wenn Sie den Magneten näher an den Sensor heranbringen, wird ein noch größeres Magnetfeld erzeugt und der Sensor bleibt eingeschaltet. Wenn sich der Sensor vom Magneten entfernt, nimmt das Magnetfeld ab.
Solange das Magnetfeld jedoch nicht kleiner als der Auslösepunkt ist (in unserem Beispiel etwa 420 Gauss), bleibt der Sensor eingeschaltet. Erst wenn das Magnetfeld unter den Auslösepunkt fällt, schaltet das Gerät ab. Auf diese Weise können wir das Vorhandensein eines Objekts erkennen.
Einschränkungen der Frontalerkennung
Diese Konfiguration ist insbesondere im Hinblick auf die Entfernung, die den Sensor ausschaltet, weniger genau. Dies liegt daran, dass die Steigung der Flusskarte (der Gauß-Abstands-Kurve) um den Freisetzungspunkt herum kleiner ist. Eine gegebene Schwankung des Wertes des magnetischen Auslösepunktes kann zu einer relativ großen Schwankung des Wertes des Abstandes führen, bei dem der Sensor abschaltet. Die gleiche Variation im magnetischen Arbeitspunkt führt zu einer kleineren Abstandsvariation. Dies ist in Abbildung 2 dargestellt.
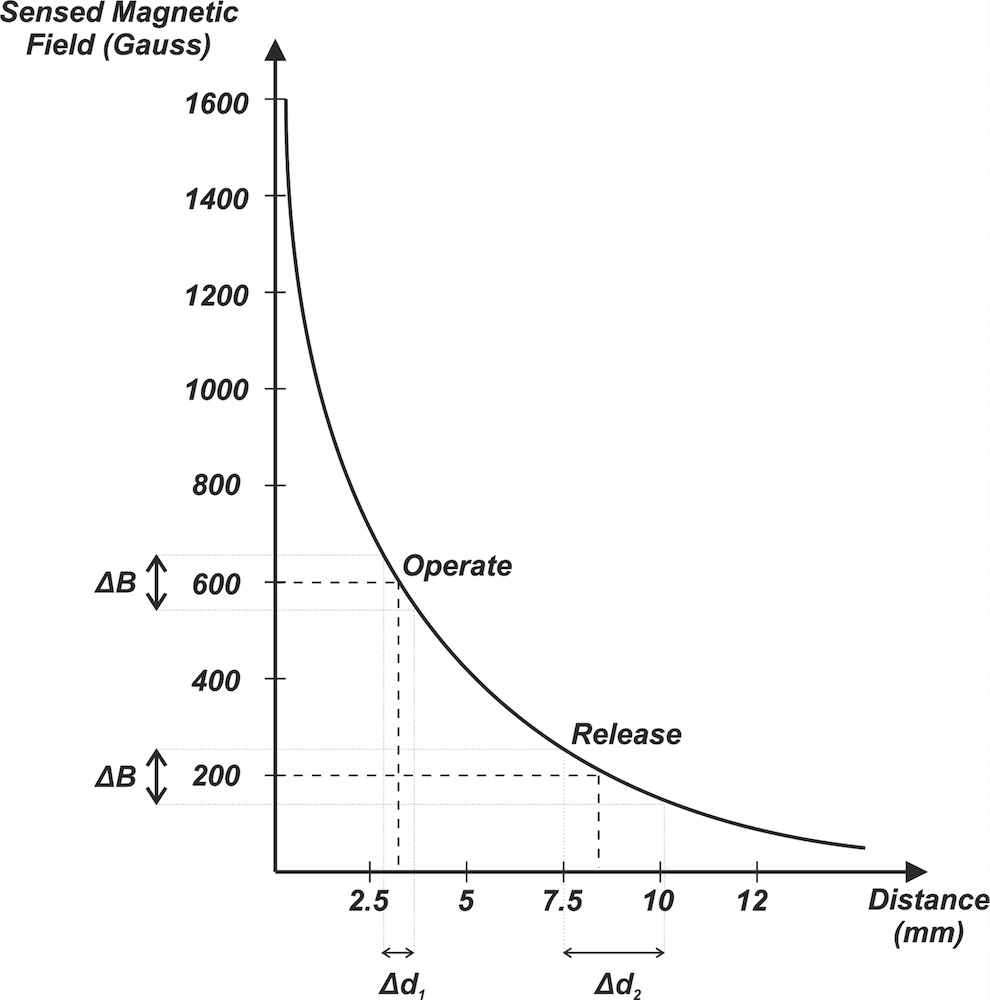
Abbildung 2
Angenommen, die Abweichung von Einheit zu Einheit der Auslöse- und Auslösepunkte beträgt ΔB für einen hypothetischen Sensor, wie in Abbildung 2 gezeigt. Da die Kurve am magnetischen Arbeitspunkt eine größere Steigung aufweist, ist Δd1 ist viel kleiner als Δd2 . Daher ist der Abstand, der dem magnetischen Arbeitspunkt entspricht, zwischen verschiedenen Platinen konsistenter.
Ein weiterer Nachteil besteht darin, dass die frontale Erfassung nicht zum Erfassen großer Verschiebungsbereiche verwendet werden kann, da die magnetischen Feldlinien sehr schnell abklingen. Außerdem ist bei frontaler Konfiguration die Beziehung zwischen dem erfassten Feld und der Entfernung nichtlinear. Dies macht die Erkennung von Langhubbewegungen zu einer Herausforderung, wenn eine lineare Positionsmessung erforderlich ist. Aufgrund dieser Einschränkungen wird die Frontalsensorik normalerweise als Näherungssensor in Anwendungen verwendet, bei denen die Genauigkeitsanforderungen nicht sehr hoch sind.
Unipolares Slide-By Sensing
Bei dieser Anordnung bewegt sich ein einzelner Pol des Magneten seitlich an der Sensorfläche des Sensors vorbei. Dies ist in Abbildung 3(a) dargestellt.
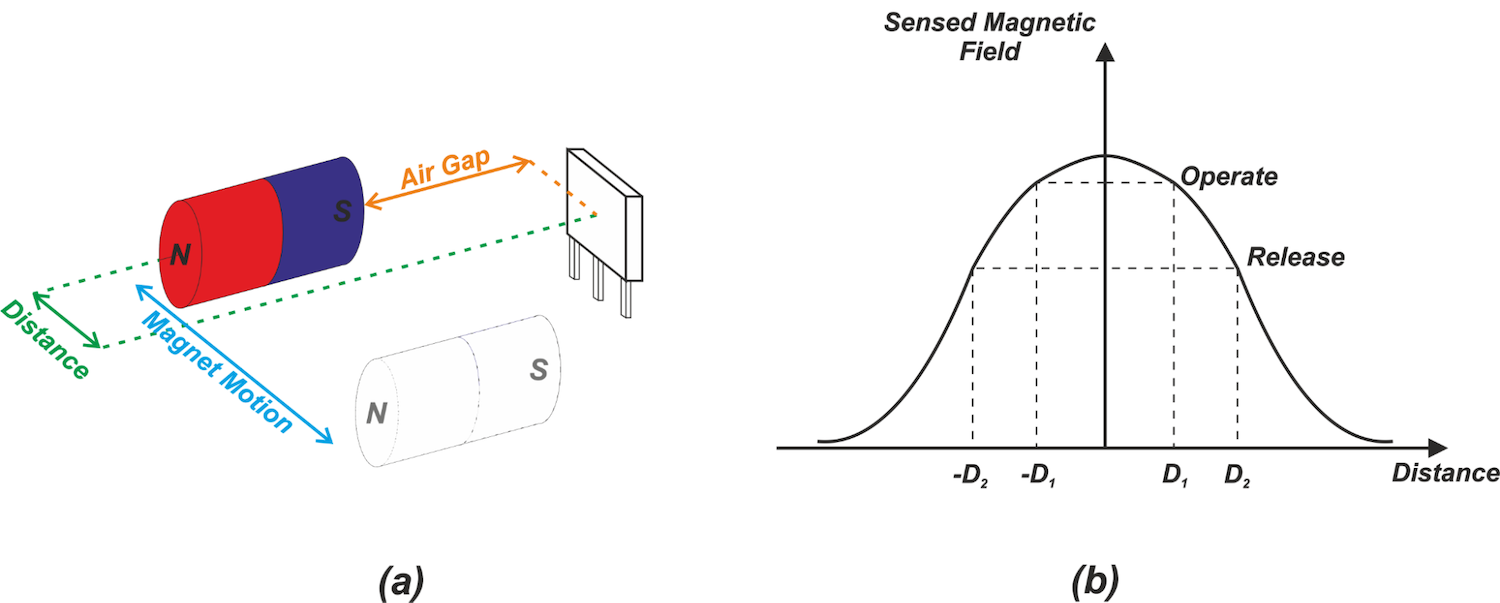
Abbildung 3
Der Magnetpol hat einen konstanten senkrechten Abstand (in der Abbildung durch „Luftspalt“ dargestellt), wenn er sich am Sensor vorbeibewegt. An der Mittelposition (Abstand =0) ist das erfasste Magnetfeld maximal. Wenn sich der Magnet vom Sensor wegbewegt, nimmt das Magnetfeld ab. Da das vom Magneten erzeugte Magnetfeld symmetrisch ist, ist die Flusskarte symmetrisch um den Ursprung, wie in Abbildung 3(b) gezeigt.
Der Spitzenwert der Flusskarte ändert sich mit dem „Luftspalt“-Wert, wie in Abbildung 4 gezeigt.
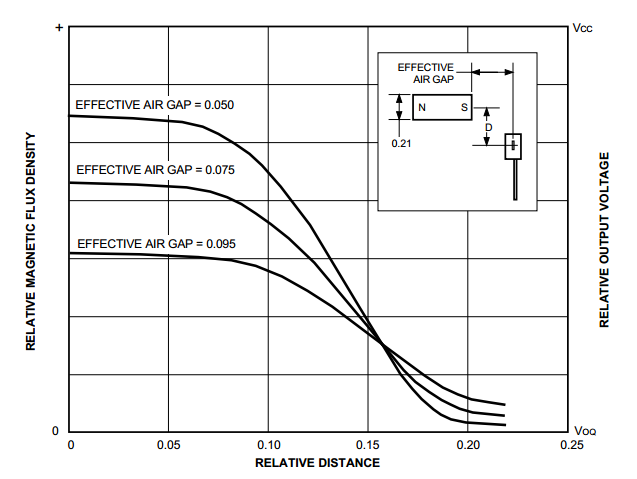
Abbildung 4. Bild mit freundlicher Genehmigung von Allegro.
Head-On- oder Slide-By-Konfiguration?
Es ist wichtig zu beachten, dass die Wahl der magnetischen Konfiguration von der Art der erkannten Bewegung abhängt. Jedes System kann einen anderen Satz mechanischer Beschränkungen und Funktionen aufweisen. Bei der frontalen Konfiguration kann sich das Objekt beispielsweise nicht am Sensor vorbeibewegen. Diese Anordnung eignet sich für Anwendungen, bei denen das erfasste Objekt eine eindeutige Endposition hat und wir daran interessiert sind, die Anwesenheit/Abwesenheit des Objekts an diesem Endpunkt zu erkennen.
Die Frontalsensorik kann beispielsweise eine gute Wahl sein, um zu erkennen, ob der Deckel einer Smartphone-Abdeckung geöffnet oder geschlossen ist. Das Slide-by-Sensing hat diese Einschränkung nicht; Es kann unabhängig davon verwendet werden, ob sich das Objekt am Sensor vorbeibewegt oder nicht.
Ein interessantes Merkmal der Slide-by-Konfiguration ist ihre Symmetrie. Da die Gauss-Abstands-Kurve dieser Struktur symmetrisch um den Ursprung ist, hängen die Auslöse- und Auslösepunkte nicht davon ab, ob wir uns auf den Sensor zu oder von ihm weg bewegen. Dies kann nützlich sein, wenn eine Abweichung von einer Mittellinie erkannt wird.
Beachten Sie, dass es andere Slide-by-Konfigurationen gibt, von denen einige keine symmetrische Reaktion bieten. Im nächsten Artikel werfen wir einen Blick auf anspruchsvollere magnetische Konfigurationen, die üblicherweise in Hall-Effekt-Positionserfassungsanwendungen verwendet werden.
Eine vollständige Liste meiner Artikel finden Sie auf dieser Seite.
Sensor
- Blutdrucksensor – Funktioniert und seine Anwendungen
- Funktionsweise von Spannungssensoren und ihre Anwendungen
- RVG-Sensor – Funktionsprinzip und seine Anwendungen
- Lambda-Sensor – Funktionsweise und ihre Anwendungen
- Bildsensorfunktion und ihre Anwendungen
- Farbsensor – Funktionsweise und Anwendungen
- Arduino-Sensor – Typen und Anwendungen
- Kompasssensor – Funktion und Anwendung
- ACS712 Stromsensorfunktion und Anwendungen
- Hall-Effekt-Sensor verstehen