


Ansatz macht unbemannte Agenten autark
Forscher haben einen Ansatz entwickelt, der es einem unbemannten Luftfahrzeug (UAV) mit Drehflüglern ermöglicht, ohne die Hilfe von GPS auf einem sich bewegenden unbemannten Bodenfahrzeug (UGV) zu landen und aufzuladen, bevor es weitergeht. Teams von autonomen Luft- und Bodenagenten werden Operationen in Such- und Rettungsumgebungen ermöglichen, die für Menschen zu abgelegen oder gefährlich sind, aber oft eine umfangreiche Positionierungs- und Kommunikationsinfrastruktur erfordern.
Eine wichtige Funktion von UAVs ist das autonome Landen auf statischen und sich bewegenden Bodenfahrzeugen, das Aufladen und das Abheben, um neue Missionen durchzuführen. UAVs werden sich nicht auf GPS verlassen können, da es leicht gestört werden kann, sodass diese Verhaltensweisen mithilfe anderer Quellen wie z. B. der Sicht an Bord durchgeführt werden müssen.
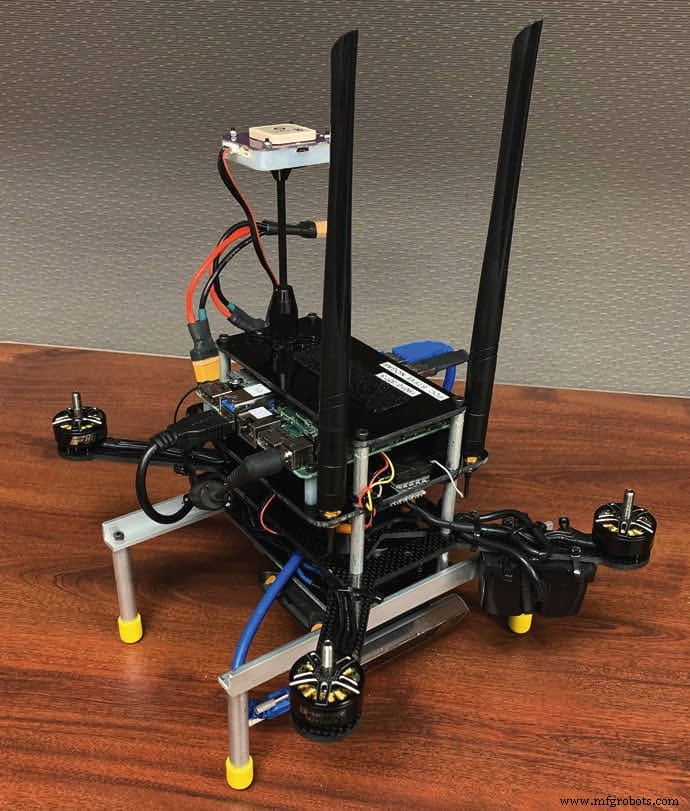
Die Forscher führten Berechnungen an Bord des Fahrzeugs mit kostengünstigen Sensoren und Computern durch. Außerdem fand keine Kommunikation zwischen dem UAV und dem UGV statt. Das Team führte sowohl Software-in-the-Loop-Simulationen als auch Outdoor-Experimente durch und demonstrierte, dass der Algorithmus bei der Durchführung von Landemanövern effektiv ist. Mit einem kleinen, speziell angefertigten Quadrotor und einem UGV bei Jogging-Geschwindigkeit experimentierten die Forscher mit Landungen.
Die Arbeit kombiniert GPS-verweigertes Verhalten und ein experimentell nachgewiesenes Verhalten. Es verwendet eine sichtbasierte Lokalisierung mit visueller Trägheits-Odometrie, einer einzigartigen Markierung auf dem Bodenfahrzeug, die für diese Anwendung entwickelt wurde, sowie Verhalten und Steuerung an Bord. Darüber hinaus wurden diese Verhaltensweisen an Bord eines kleinen UAS mit erheblichen Recheneinschränkungen durchgeführt.
Die benutzerdefinierte Markierung auf dem Bodenfahrzeug ist speziell für die Landeaufgabe konzipiert. Es enthält kleinere Markierungen innerhalb der größeren Markierung, die immer noch betrachtet werden können, selbst wenn sich die Kamera der Markierung nähert. Der Ansatz könnte die Abhängigkeit von der Bezugsmarkierung auf dem Bodenfahrzeug verringern und sie durch künstliche Intelligenz ersetzen, die das Fahrzeug erkennt, auf dem sie landen möchte.
Sensor
- Was ist eine Lichtmaschine?
- Tragbare Softwareagenten:Ein „Goldilocks“-Ansatz für die IoT-Konnektivität
- Was macht einen Innovator aus?
- Aerosol-Schnelldetektor für biologische Arbeitsstoffe
- EV vs. ICE:Wie unterscheidet sich das Kabelbaumdesign?
- Adapter macht alle Kopfhörer intelligent
- Unmanned Aerial Vehicle (UAV) in großer Höhe zur Überwachung meteorologischer Parameter
- Ladeanschluss für autonome Drohnenschwärme
- Ist die Öffentlichkeit bereit für ein autonomes Fahrzeug der Stufe 4?
- Was ist eine Gehäuseerdung?