


Megapixel Photon-Counting-Kameratechnologie
Stellen Sie sich eine Kamera vor, die entwickelt wurde, um Bilder mit einer Auflösung von einem einzelnen Photon bei 24.000 Bildern pro Sekunde aufzunehmen. Dank eines elektronischen Verschlusses, der nur 3,8 ns geöffnet bleiben kann und der mit schnellen Laserpulsen von nur wenigen Pikosekunden Dauer synchronisiert werden kann, kann man buchstäblich sehen, wie sich Licht durch den Weltraum ausbreitet. Mit dieser Fähigkeit eröffnen sich neue Anwendungen wie Quantenvision, Geisterbildgebung, Sub-Shot-Noise-Bildgebung, Quanten-LiDAR und Quantendestillation, um nur einige zu nennen.
Allen diesen Anwendungen gemeinsam ist die Notwendigkeit einer Einzelphotonendetektion und einer hohen zeitlichen Auflösung mit geringem Rauschen und hoher Empfindlichkeit. Diese neue Kamera ist zu all dem in der Lage, tut dies aber zusätzlich auf einer Million Pixel gleichzeitig, wodurch die Aufnahme und möglicherweise die Rekonstruktion erheblich beschleunigt werden. Im Kern dieser Pixel befindet sich eine Einzelphotonen-Avalanche-Diode (SPAD), die eine Photonenerkennung durchführt und einen digitalen Impuls erzeugt. Dieser Impuls kann gezählt oder mit einem Zeitstempel versehen werden, wodurch die Photonenzählung und der zeitaufgelöste Charakter der Kamera angegeben werden.
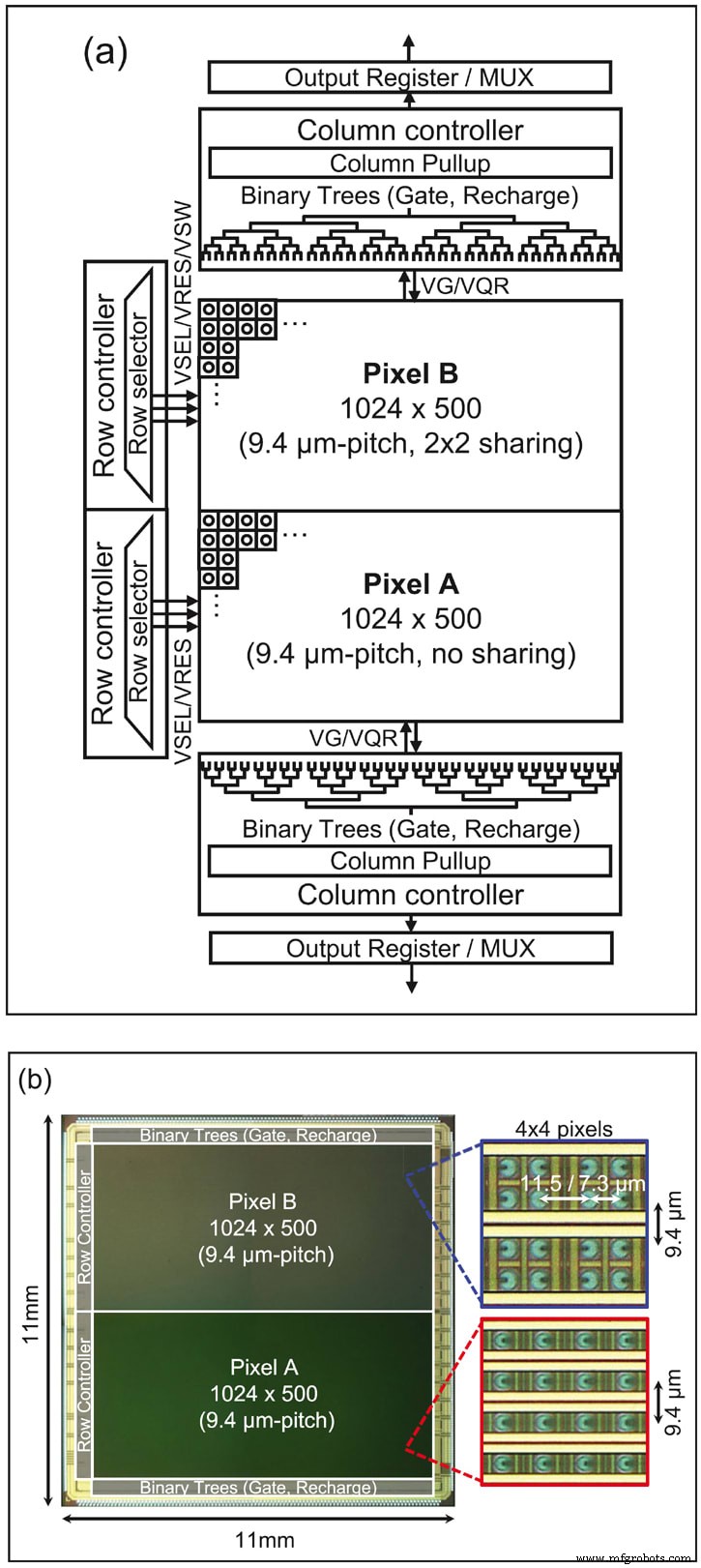
In einem im Peer-Review-Journal Optica veröffentlichten Artikel haben wir die erste 1-Megapixel-Kamera auf Basis der SPAD-Pixel vorgestellt. Die Pixel haben einen Abstand von 9,4 μm mit einer 7T- (7 Transistoren pro Pixel) oder 5,75T-Architektur. Die mikroskopische Aufnahme des Kamerachips ist in Abbildung 1(b) dargestellt. Das Kamerablockdiagramm ist in Abbildung 1(a) dargestellt; es umfasst einen doppelten binären Baum zur Steuerung des Verschlusses mit einer Genauigkeit von etwa 100 ps und einer Position, die in Schritten von 36 ps einstellbar ist. Dadurch können 3D-Bilder rekonstruiert werden, indem die Laufzeit eines Lichtimpulses gemessen wird, der den Laser verlässt und von einem Objekt reflektiert wird. Es ermöglicht auch das Einfangen von Licht während des Fluges, wodurch interessante relativistische Effekte im Labor freigelegt werden.
Der Chip wurde als Intensitätsbildsensor mit einem Standarddiagramm (Abbildung 2(a)) mit bis zu 14 Bit auf Pixelebene getestet. Die Fig. 3(a) und (b) zeigen 2D- und farbcodierte 3D-Bilder, die durch Beleuchten einer Szene mit einem 637-nm-Laser, gepulst bei 40 MHz, erhalten und auf dem Bildsensor mit halber Auflösung aufgenommen wurden. Das Gate-Fenster mit seiner Länge von 3,8 ns wird von 0,6 ns bis 13,2 ns in Schritten von 36 ps verschoben, um vollständige Photonenintensitätsprofile als Funktion der Gate-Position zu erhalten.

Der Abstand LSB in dieser Messung entspricht 5,4 mm. Die Tiefeninformationen werden rekonstruiert, indem die Position der ansteigenden Flanke des geglätteten Intensitätsprofils für jedes Pixel entsprechend der Ankunftszeit des reflektierten Laserpulses erfasst wird. Der Gatterzeitversatz über das Array wird kompensiert, indem eine unabhängig gemessene Zeitversatzverteilung von der gemessenen Ankunftszeitverteilung subtrahiert wird. In Abbildung 3(b) zeigt die rote Farbe eine größere Nähe zur SPAD-Kamera an, während die blaue Farbe einer größeren Entfernung entspricht. Der maximale Tiefenbereich für diese Messung wurde auf 2 m eingestellt, kann aber durch Verringern der Laserwiederholfrequenz und Erhöhen des Torschritts auf mehrere zehn Meter erweitert werden.
Der feine Gate-Abtastabstand und die lange Belichtung werden verwendet, um eine hohe Tiefenpräzision zu erreichen, und die resultierende Datenerfassungszeit für diese Messung betrug einige zehn Sekunden. Dies ist beträchtlich länger als bei anderen Entfernungsverfahren, wie etwa der indirekten Flugzeit, kann jedoch leicht verringert werden, indem der Gate-Abtastabstand erhöht, die Abtastreichweite verringert und die Laserleistung erhöht wird, um die Belichtungszeit zu verkürzen. Darüber hinaus wird eine weitere Verbesserung durch die Implementierung einer Mikrolinse auf dem Chip zur Steigerung der Empfindlichkeit erwartet.
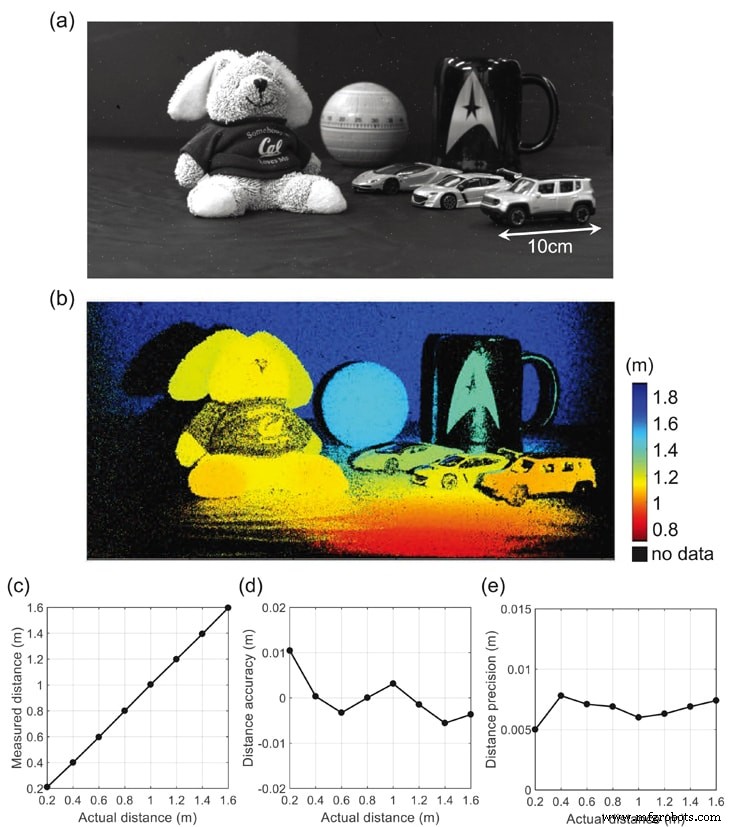
Abbildung 3(c) zeigt die gemessene Entfernung als Funktion der tatsächlichen Objektentfernung. In Abbildung 3(c), (d) und (e) wird ein flaches, mit weißem Papier bedecktes Objekt (Reflexionsgrad etwa 60 %) verwendet, um die gemessene Entfernung, Genauigkeit und Präzision zu bewerten. In Abbildung 3(c) wird der gemessene Abstand extrahiert, indem der Durchschnitt des Einzelpixelabstands über 20 × 20 Pixel in der Mitte des Arrays genommen wird. Innerhalb des gemessenen Bereichs von 0,2 bis 1,6 m ist eine sehr gute Übereinstimmung mit der tatsächlichen Entfernung zu beobachten. In Abbildung 3(d) wird die Entfernungsgenauigkeit als die gemittelte gemessene Entfernung subtrahiert von der tatsächlichen Entfernung berechnet. Für den gemessenen Entfernungsbereich ist die Genauigkeit immer besser als 1 cm. In Abbildung 3(e) wird die Abstandsgenauigkeit als Standardabweichung des Einzelpixelabstands über 20 × 20 Pixel in der Mitte des Arrays ausgenutzt. Die Genauigkeit ist besser als 7,8 mm (rms) für alle gemessenen Punkte bis zu 1,6 m.
Die Erkennung mehrerer Objekte wurde experimentell demonstriert, indem entweder zeitliche Beleuchtungs- oder Belichtungsmuster codiert wurden, was einen hohen Rechenaufwand zur Wiederherstellung von 3D-Bildern mit sich bringt. Ein zeitgesteuerter Time-of-Flight-Sensor bietet eine alternative, skalierbare Lösung mittels kompakter Pixelschaltkreise und weniger komplizierter Berechnung.
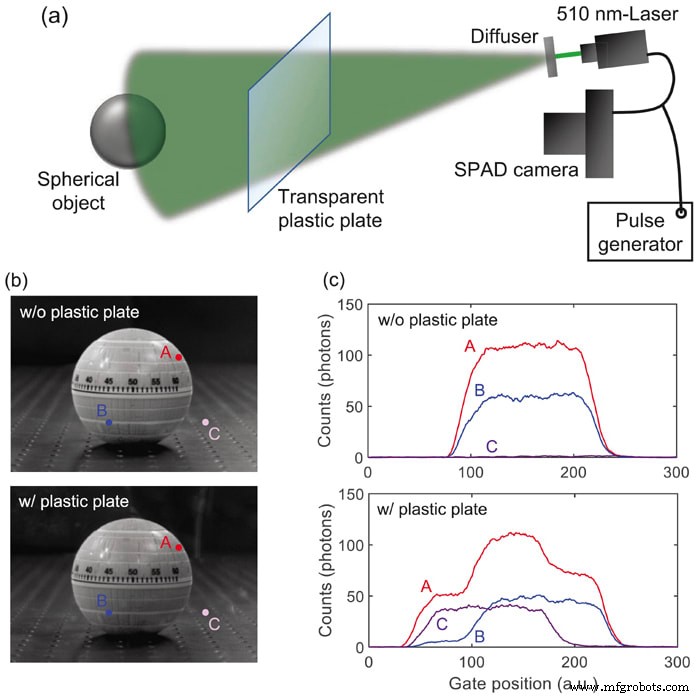
Abbildung 4(a) zeigt den experimentellen Aufbau:Ein 510-nm-Laserstrahl, gepulst mit 40 MHz, wird durch einen Diffusor gestreut und verwendet, um ein kugelförmiges Ziel zu beleuchten. Die SPAD-Kamera wird mit dem Triggersignal des Lasers synchronisiert, und eine transparente Kunststoffplatte wird zwischen Kamera und Objekt eingefügt. Die Entfernungen von der Kamera zur Kunststoffplatte und zum Objekt betragen 0,45 m bzw. 0,75 m. Abbildung 4(b) zeigt 2D-Intensitätsbilder bei Innenbeleuchtung mit und ohne eingesetzte Kunststoffplatte. Da die Platte fast transparent ist, wird in diesen beiden Fällen kein signifikanter Unterschied in den 2D-Bildern beobachtet.
Die gemessenen Time-Gating-Profile für drei repräsentative Punkte (A, B und C) sind in Abbildung 4(c) dargestellt. Ohne die Platte zeigen die Time-Gating-Profile für Punkt A und B nur eine einzige geglättete rechteckige Funktionswellenform mit ihrer ansteigenden Flanke um die Gate-Position 100 herum (ein Schritt der Position entspricht 36 ps). Für Punkt C bleibt die Photonenzahl über den gemessenen Blendenpositionsbereich nahe Null, was darauf hinweist, dass an diesem Pixel kein reflektierendes Objekt erkannt wird.
Bei der Kunststoffplatte hingegen zeigt das Profil am Punkt A zweistufig ansteigende Flanken um die Gate-Positionen 40 und 100. Da das gemessene Profil der Photonenzählungen eine Faltung einer einzelnen geglätteten Rechteckfunktion und der Intensitätsverteilung der reflektierten Photonen ist, das zweistufige Profil ist ein überzeugender Beweis für die Doppelreflexion von der Kunststoffplatte und dem kugelförmigen Objekt. Ein ähnliches Verhalten wird am Punkt B beobachtet, wo die Steigung der ersten Anstiegsflanke um die Angussposition 40 herum milder ist als die von Punkt A. Das Profil am Punkt C zeigt nur eine einzige ansteigende Flanke um die Anschnittposition 40 herum, entsprechend der Reflexion von dem Kunststoff Teller. Die Variation der Steigung für die ansteigende Flanke um die Gate-Position 40 zwischen verschiedenen Punkten wird durch die ungleichmäßige Reflexion von der Oberfläche der Kunststoffplatte induziert.
Die Ergebnisse demonstrieren die Fähigkeit einer zeitgesteuerten SPAD-Kamera, eine räumlich überlappende Multi-Objekt-Erkennung durchzuführen. Beachten Sie, dass das vorgeschlagene Schema auf die Detektion von mehr als zwei Reflexionsspitzen angewendet werden kann. Ein feineres Scannen des virtuellen Gate-Fensters in der Nachbearbeitung ermöglicht die systematische Erkennung mehrerer Peaks. Der minimal auflösbare Abstand zwischen zwei benachbarten reflektierenden Materialien wird grundsätzlich durch die endliche Anstiegs- oder Abfallzeit des Torfensterprofils begrenzt, entsprechend 5-10 cm bei diesem SPAD-Sensor.
Zusammenfassend wurde zum ersten Mal über einen zeitgesteuerten SPAD-Bildsensor mit 1 Megapixel berichtet. In der SPAD-Forschung gilt das Erreichen eines Megapixel-SPAD-Sensors seit über einem Jahrzehnt als einer der wichtigsten Meilensteine. Der Sensor wird auf 2D-Bildgebung mit hohem Dynamikbereich und 3D-Bildgebung mit hoher räumlicher und zeitlicher Auflösung angewendet. Nach unserem besten Wissen wurde die räumlich überlappende Multi-Objekt-Erkennung mit Einzelphotonen-Time-Gating-Schema zum ersten Mal experimentell demonstriert.
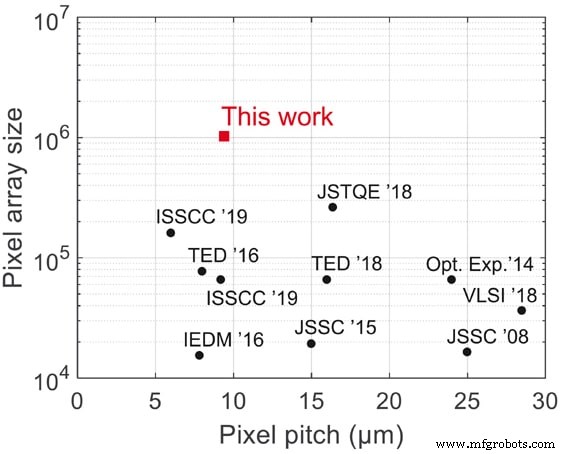
Abbildung 5 zeigt einen aktuellen Vergleich des SPAD-Pixelabstands und der Arraygröße. Die Array-Größe des Sensors ist die größte, fast viermal höher als die des State-of-the-Art-Sensors, während der Pixelabstand einer der kleinsten ist. Aufgrund seiner hochauflösenden 2D- und 3D-Bildgebungsfähigkeiten wird der vorgeschlagene Sensor in einer Vielzahl industrieller Anwendungen wie Sicherheits-, Automobil-, Roboter-, biomedizinische und wissenschaftliche Anwendungen, einschließlich Quantenbildgebung und Ultrahochgeschwindigkeitsbildgebung, nützlich sein /P>
Lesen Sie einen vollständigen Bericht über die Technologie in der wissenschaftlichen Zeitschrift Optica .
Dieser Artikel wurde von Edoardo Charbon, Professor, EPFL Schweiz (Lausanne, Schweiz) verfasst. Weitere Informationen finden Sie hier .
Sensor
- Kamera
- Investitionen in Fertigungstechnologie — Post-Pandemie
- BrickPi-Bookreader
- Linearbewegungstechnologie
- Objektivlose Multi-Shot-Kamera
- Hochauflösender Millimeterwellen-Körperscanner
- Leitfaden für Lieferanten 2021:Sensoren
- Pyroelektrischer Sandwich-Wärmeenergie-Harvester
- plenoptische Kamera
- E-Tongue-Nanosensor-Array