


bürstenloser Gleichstrommotor
Bürstenlose Gleichstrommotoren wurden aus herkömmlichen bürstenbehafteten Gleichstrommotoren mit der Verfügbarkeit von Halbleiter-Leistungshalbleitern entwickelt. Warum diskutieren wir also bürstenlose Gleichstrommotoren in einem Kapitel über Wechselstrommotoren?
Bürstenlose DC-Motoren ähneln AC-Synchronmotoren. Der Hauptunterschied besteht darin, dass Synchronmotoren eine sinusförmige EMF entwickeln , im Vergleich zu einer rechteckigen oder trapezförmigen Gegen-EMK für bürstenlose Gleichstrommotoren.
Beide haben vom Stator erzeugte rotierende Magnetfelder, die ein Drehmoment in einem magnetischen Rotor erzeugen.
Synchronmotoren haben normalerweise eine Größe von mehreren Kilowatt, oft mit elektromagnetischen Rotoren. Echte Synchronmotoren werden als Einfachdrehzahl betrachtet, ein Teiler der Netzfrequenz. Bürstenlose Gleichstrommotoren sind in der Regel klein – einige Watt bis zehn Watt, mit Permanentmagnet-Rotoren.
Die Drehzahl eines bürstenlosen Gleichstrommotors ist nicht festgelegt, es sei denn, er wird von einem Phasenregelkreis angetrieben, der einer Referenzfrequenz untergeordnet ist. Der Baustil ist entweder zylindrisch oder Pfannkuchen.
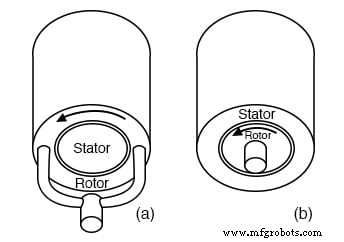
Zylindrische Konstruktion:(a) Außenrotor, (b) Innenrotor
Die gebräuchlichste Konstruktion, zylindrisch, kann zwei Formen annehmen (Abbildung oben). Die gebräuchlichste zylindrische Ausführung ist mit dem Rotor innen oben rechts. Dieser Motortyp wird in Festplattenlaufwerken verwendet. Es ist auch möglich, den Rotor außen um den Stator herum anzubringen.
Dies ist bei bürstenlosen DC-Lüftermotoren ohne Welle der Fall. Diese Bauweise kann kurz und kräftig sein. Die Richtung des Magnetflusses ist jedoch radial zur Drehachse.
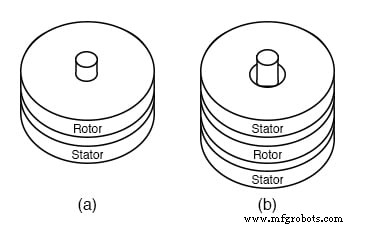
Pancake-Motorkonstruktion:(a) Einzelstator, (b) Doppelstator
Pancake-Motoren mit hohem Drehmoment können Statorspulen auf beiden Seiten des Rotors haben (Abbildung oben-b).
Anwendungen mit geringerem Drehmoment wie Floppy-Disk-Antriebsmotoren genügen mit einer Statorspule auf einer Seite des Rotors (Abbildung oben-a). Die Richtung des magnetischen Flusses ist axial, also parallel zur Drehachse.
Die Kommutierungsfunktion kann von verschiedenen Wellenpositionssensoren ausgeführt werden:einem optischen Encoder, einem magnetischen Encoder (Resolver, Synchro usw.) oder magnetischen Hall-Effekt-Sensoren. Kleine preiswerte Motoren verwenden Hall-Effekt-Sensoren.
Ein Hall-Effekt-Sensor ist ein Halbleiterbauelement, bei dem der Elektronenfluss durch ein Magnetfeld senkrecht zur Stromflussrichtung beeinflusst wird. Es sieht aus wie ein variables Widerstandsnetzwerk mit vier Anschlüssen. Die Spannungen an den beiden Ausgängen sind komplementär.
Das Anlegen eines Magnetfelds an den Sensor verursacht eine kleine Spannungsänderung am Ausgang. Der Hall-Ausgang kann einen Komparator ansteuern, um eine stabilere Ansteuerung des Leistungsgeräts bereitzustellen. Oder es kann eine Verbundtransistorstufe ansteuern, wenn es richtig vorgespannt ist.
Modernere Hall-Effekt-Sensoren können einen integrierten Verstärker und eine digitale Schaltung enthalten. Dieses 3-Leiter-Gerät kann den Leistungstransistor direkt ansteuern, der eine Phasenwicklung speist. Der Sensor muss in der Nähe des Permanentmagnetrotors montiert werden, um seine Position zu erfassen.

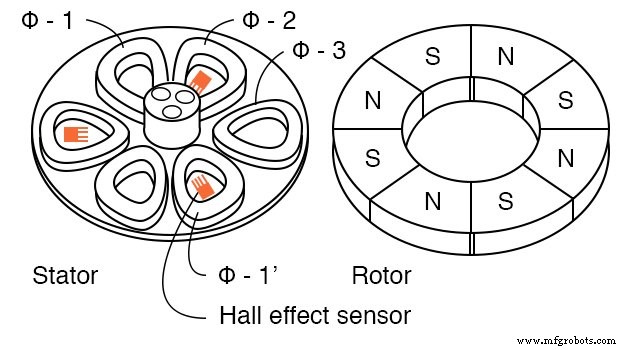
Hall-Effekt-Sensoren kommutieren bürstenlosen 3-φ-DC-Motor
Der einfache zylindrische 3-φ-Motor (Abbildung oben) wird von einem Hall-Effekt-Gerät für jede der drei Statorphasen kommutiert. Die sich ändernde Position des Permanentmagnet-Rotors wird vom Hall-Gerät erfasst, wenn sich die Polarität des vorbeilaufenden Rotorpols ändert.
Dieses Hall-Signal wird verstärkt, damit die Statorspulen mit dem richtigen Strom angesteuert werden. Hier nicht gezeigt, können die Hall-Signale durch kombinatorische Logik für effizientere Antriebswellenformen verarbeitet werden.
Der obige zylindrische Motor könnte eine Festplatte antreiben, wenn er mit einem Phased Locked Loop (PLL) ausgestattet wäre, um eine konstante Geschwindigkeit aufrechtzuerhalten. Eine ähnliche Schaltung könnte den Motor des Pancake-Diskettenlaufwerks antreiben (Abbildung unten). Auch hier wäre eine PLL erforderlich, um eine konstante Geschwindigkeit aufrechtzuerhalten.
Bürstenloser Pfannkuchenmotor
Der 3-φ-Pfannkuchenmotor hat 6-Statorpole und 8-Rotorpole. Der Rotor ist ein flacher Ferritring, der mit acht axial magnetisierten Wechselpolen magnetisiert ist. Wir zeigen nicht, dass der Rotor mit einer Weichstahlplatte zur Befestigung am Lager in der Mitte des Stators bedeckt ist.
Die Stahlplatte trägt auch dazu bei, den Magnetkreis zu schließen. Die Statorpole sind ebenfalls auf einer Stahlplatte montiert, um den Magnetkreis zu schließen.
Die flachen Statorspulen sind trapezförmig, um den Spulen besser zu passen und nähern sich den Rotorpolen. Die 6-Stator-Spulen bestehen aus drei Wicklungssträngen.
Wenn die drei Statorphasen nacheinander erregt würden, würde ein rotierendes Magnetfeld erzeugt.
Der Permanentmagnet-Rotor würde wie bei einem Synchronmotor folgen. Ein zweipoliger Rotor würde diesem Feld mit der gleichen Drehrate wie das Drehfeld folgen. Unser 8-poliger Rotor dreht sich jedoch aufgrund der zusätzlichen Pole im Rotor mit einem Teiler dieser Geschwindigkeit.
Der bürstenlose DC-Lüftermotor hat diese Eigenschaften:

Bürstenloser Lüftermotor, 2-φ
- Der Stator hat 2 Phasen, die auf 4 Pole verteilt sind
- Es gibt vier ausgeprägte Pole ohne Wicklungen, um Nulldrehmomentpunkte zu vermeiden.
- Der Rotor hat vier Hauptantriebspole.
- Der Rotor hat 8 übereinanderliegende Pole, um Nulldrehmomentpunkte zu vermeiden.
- Die Hall-Effekt-Sensoren haben einen physikalischen Abstand von 45°.
- Das Lüftergehäuse wird auf dem Rotor platziert, der über dem Stator platziert wird.
Das Ziel eines bürstenlosen Lüftermotors besteht darin, die Herstellungskosten zu minimieren. Dies ist ein Anreiz, Produkte mit geringerer Leistung von einer 3-φ- auf eine 2-φ-Konfiguration zu verschieben. Je nachdem, wie er angetrieben wird, kann er als 4-φ-Motor bezeichnet werden.
Sie erinnern sich, dass konventionelle Gleichstrommotoren keine gerade Anzahl von Ankerpolen (2, 4 usw.) haben können, wenn sie selbstanlaufend sein sollen, wobei 3, 5, 7 gemeinsam sind. Somit ist es möglich, dass ein hypothetischer 4-poliger Motor bei einem Drehmomentminima zum Stillstand kommt, wo er nicht aus dem Stillstand gestartet werden kann.
Die Addition der vier kleinen ausgeprägten Pole ohne Wicklungen überlagert die Drehmoment-Positions-Kurve mit einem Welligkeitsdrehmoment. Wenn dieses Welligkeitsdrehmoment der normalen Kurve des erregten Drehmoments hinzugefügt wird, werden die Drehmomentminima teilweise entfernt.
Dadurch ist es möglich, den Motor für alle möglichen Stopppositionen zu starten. Das Hinzufügen von acht Permanentmagnetpolen zum normalen 4-poligen Permanentmagnetrotor überlagert dem normalen 4-Pol-Welligkeitsdrehmoment ein kleines zweites harmonisches Welligkeitsdrehmoment.
Dadurch werden die Drehmomentminima weiter entfernt. Solange die Drehmomentminima nicht auf Null sinken, sollten wir den Motor starten können. Je erfolgreicher wir die Drehmomentminima beseitigen, desto leichter startet der Motor.
Der 2-φ-Stator erfordert einen Abstand der Hall-Sensoren um 90° elektrisch. Wenn der Rotor ein 2-Pol-Rotor wäre, würden die Hall-Sensoren 90° . platziert werden physisch. Da wir einen 4-poligen Permanentmagnet-Rotor haben, müssen die Sensoren 45° . platziert werden physisch, um die 90° . zu erreichen elektrischer Abstand. (Beachte den Hallenabstand oben.)
Der Großteil des Drehmoments ist auf die Wechselwirkung der inneren 2-φ-Spulen des Stators mit dem 4-poligen Abschnitt des Rotors zurückzuführen. Außerdem muss sich der 4-Pol-Bereich des Rotors unten befinden, damit die Hall-Sensoren die richtigen Kommutierungssignale erfassen.
Der 8-polige Rotorabschnitt dient nur der Verbesserung des Motorstarts.

Bürstenloser Gleichstrommotor 2-φ-Gegentaktantrieb
In der Abbildung oben verwendet der 2-φ-Gegentaktantrieb (auch als 4-φ-Antrieb bekannt) zwei Hall-Effekt-Sensoren, um vier Wicklungen anzutreiben. Die Sensoren haben einen Abstand von 90° elektrisch auseinander, das sind 90° physikalisch für einen einpoligen Rotor.
Da der Hall-Sensor zwei komplementäre Ausgänge hat, bietet ein Sensor die Kommutierung für zwei gegenüberliegende Wicklungen.
Industrietechnik
- AC-Kommutatormotoren
- Nanotec:kompakte Motorsteuerung für bürstenlose Gleichstrommotoren und Schrittmotoren
- So beheben Sie Fehler bei Motoren mit gewickeltem Rotor
- Elektromotoren-Tipp:Minimieren Sie Ihre Startzeiten
- Technischer Tipp:Motoren
- Elektromotorsicherheit:Verschiedene Phasen und Sicherheitsmaßnahmen
- 4 Hauptarten von Wicklungsfehlern bei AC-Elektromotoren
- Über Industriemotoren und Anwendungen
- BLDC-Motoren und Automatisierung
- Eine Einführung in den BLDC-Motor