


Schrittmotoren
Schrittmotor vs. Servomotor
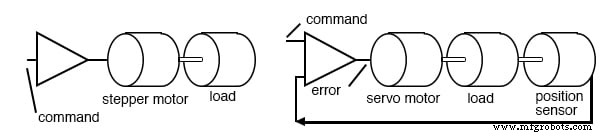
Ein Schrittmotor ist eine „digitale“ Version des Elektromotors. Der Rotor bewegt sich wie befohlen in diskreten Schritten, anstatt sich kontinuierlich wie ein herkömmlicher Motor zu drehen. Wenn er gestoppt, aber mit Strom versorgt wird, wird ein Stepper (kurz für Schrittmotor) hält seine Last mit einem Haltemoment .
Die breite Akzeptanz des Schrittmotors in den letzten zwei Jahrzehnten wurde durch den Aufstieg der digitalen Elektronik vorangetrieben. Die moderne Festkörper-Treiberelektronik war ein Schlüssel zum Erfolg. Und Mikroprozessoren können problemlos mit Schrittmotortreiberschaltungen verbunden werden.
Anwendungstechnisch war der Vorgänger des Schrittmotors der Servomotor. Heute ist dies eine kostenintensivere Lösung für Hochleistungs-Bewegungssteuerungsanwendungen. Der Aufwand und die Komplexität eines Servomotors sind auf die zusätzlichen Systemkomponenten zurückzuführen:Positionssensor und Fehlerverstärker) Es ist immer noch der Weg, schwere Lasten zu positionieren, die für Stepper mit geringerer Leistung nicht greifbar sind.
Eine hohe Beschleunigung oder ungewöhnlich hohe Genauigkeit erfordert immer noch einen Servomotor. Ansonsten ist der Stepper aufgrund der einfachen Antriebselektronik, der guten Genauigkeit, des guten Drehmoments, der moderaten Geschwindigkeit und der geringen Kosten der Standard.
Schrittmotor vs. Servomotor
Ein Schrittmotor positioniert die Schreib-Lese-Köpfe in einem Diskettenlaufwerk. Sie wurden einst für den gleichen Zweck in Festplatten verwendet. Die hohe Geschwindigkeit und Genauigkeit der modernen Festplattenpositionierung erfordert jedoch die Verwendung eines linearen Servomotors (Schwingspule).
Der Servoverstärker ist ein Linearverstärker mit einigen schwer zu integrierenden diskreten Komponenten. Es ist ein beträchtlicher Konstruktionsaufwand erforderlich, um die Servoverstärkerverstärkung gegenüber dem Phasengang der mechanischen Komponenten zu optimieren. Die Schrittmotortreiber sind weniger komplexe Halbleiterschalter, die entweder „ein“ oder „aus“ sind. Somit ist eine Schrittmotorsteuerung weniger komplex und kostspielig als eine Servomotorsteuerung.
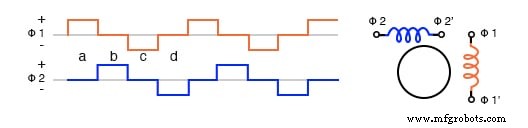
Slo-syn Synchronmotoren können wie ein einphasiger Permanentkondensator-Induktionsmotor mit Wechselspannung betrieben werden. Der Kondensator erzeugt ein 90° zweite Phase. Mit der Netzgleichspannung haben wir einen 2-phasigen Antrieb.
Antriebswellenformen von bipolar (±) Rechteckwellen von 2-24V sind heutzutage üblicher. Die bipolaren Magnetfelder können auch von unipolar . erzeugt werden (eine Polarität) Spannungen, die an abwechselnde Enden einer mittig angezapften Wicklung angelegt werden (Abbildung unten).
Mit anderen Worten, Gleichstrom kann auf den Motor geschaltet werden, damit er Wechselstrom sieht. Da die Wicklungen nacheinander erregt werden, synchronisiert sich der Rotor mit dem daraus resultierenden Statormagnetfeld. Daher behandeln wir Schrittmotoren als eine Klasse von AC-Synchronmotoren.
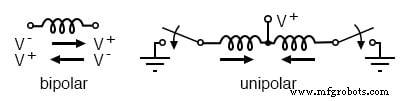
Ein unipolarer Antrieb einer mittig angezapften Spule bei (b), emuliert Wechselstrom in einer Einzelspule bei (a)
Eigenschaften
Schrittmotoren sind robust und kostengünstig, da der Rotor keine Wicklungsschleifringe oder Kommutator enthält. Der Rotor ist ein zylindrischer Vollkörper, der auch entweder ausgeprägte Pole oder feine Zähne aufweisen kann. Meistens ist der Rotor ein Permanentmagnet.
Sie können feststellen, dass der Rotor ein Permanentmagnet ist, indem Sie eine kraftlose Handdrehung zeigen, die ein Rastmoment anzeigt , Drehmomentpulsationen. Schrittmotorspulen sind in einem laminierten Stator gewickelt, außer für kann stapeln Konstruktion. Es können nur zwei oder sogar fünf Wicklungsphasen vorhanden sein.
Diese Phasen werden häufig in Paare aufgeteilt. Somit kann ein 4-poliger Schrittmotor zwei Phasen haben, die aus in Reihe geschalteten Polpaaren mit einem Abstand von 90° . bestehen ein Teil. Es können auch mehrere Polpaare pro Phase vorhanden sein. Ein 12-poliger Stepper hat beispielsweise 6 Polpaare, drei Paare pro Phase.
Da Schrittmotoren nicht unbedingt kontinuierlich rotieren, gibt es keine PS-Angabe. Wenn sie sich kontinuierlich drehen, erreichen sie nicht einmal eine Nennleistung von unter einem Bruchteil der PS-Leistung. Sie sind im Vergleich zu anderen Motoren wirklich kleine Geräte mit geringem Stromverbrauch.
Sie haben Drehmomentwerte von bis zu tausend in-oz (Inch-Unzen) oder zehn Nm (Newton-Meter) für eine 4-kg-Einheit. Ein kleiner Schrittmotor in der Größe eines „Gramms“ hat ein Drehmoment von einem Hundertstel Newtonmeter oder einigen Inch-Unzen. Die meisten Stepper haben einen Durchmesser von wenigen Zoll mit einem Bruchteil eines Nm oder ein paar In-Unzen Drehmoment.
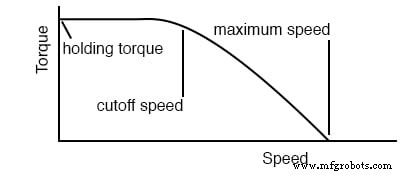
Das verfügbare Drehmoment ist eine Funktion von Motordrehzahl, Lastträgheit, Lastdrehmoment und Antriebselektronik, wie in der Drehzahl-Drehmoment-Kurve dargestellt unter. Ein bestromter, haltender Stepper hat ein relativ hohes Haltedrehmoment Bewertung. Für einen laufenden Motor steht weniger Drehmoment zur Verfügung, das bei einer hohen Drehzahl auf Null sinkt.
Diese Drehzahl ist aufgrund der mechanischen Resonanz der Motorlastkombination häufig nicht erreichbar.
Eigenschaften der Steppergeschwindigkeit
Schrittmotoren bewegen sich Schritt für Schritt, der Schrittwinkel wenn die Antriebswellenformen geändert werden. Der Schrittwinkel hängt von den Konstruktionsdetails des Motors ab:Anzahl der Spulen, Anzahl der Pole, Anzahl der Zähne. Er kann 90° . betragen auf 0,75° , entspricht 4 bis 500 Schritten pro Umdrehung.
Die Antriebselektronik kann den Schrittwinkel halbieren, indem sie den Rotor in Halbschritten bewegt .
Stepper können die Geschwindigkeiten auf der Drehzahl-Drehmoment-Kurve nicht sofort erreichen. Die maximale Starthäufigkeit ist die höchste Rate, mit der ein gestoppter und unbelasteter Stepper gestartet werden kann. Jede Belastung macht diesen Parameter unerreichbar.
In der Praxis wird die Schrittfrequenz beim Start deutlich unterhalb der maximalen Startfrequenz hochgefahren. Beim Stoppen eines Schrittmotors kann die Schrittrate vor dem Stoppen verringert werden.
Das maximale Drehmoment, bei dem ein Stepper starten und stoppen kann, ist das Anzugsdrehmoment . Diese Drehmomentbelastung des Schrittmotors ist auf Reibungs- (Bremse) und Trägheitslasten (Schwungrad) auf die Motorwelle zurückzuführen. Sobald der Motor auf Drehzahl ist, Auszugsdrehmoment ist das maximale nachhaltige Drehmoment, ohne Schritte zu verlieren.
Es gibt drei Arten von Schrittmotoren in der Reihenfolge steigender Komplexität:variable Reluktanz, Permanentmagnet und Hybrid. Der Stepper mit variabler Reluktanz hat einen massiven Weichstahlrotor mit ausgeprägten Polen. Der Permanentmagnet-Stepper hat einen zylindrischen Permanentmagnet-Rotor.
Der Hybrid-Stepper verfügt über weiche Stahlzähne, die dem Permanentmagnet-Rotor für einen kleineren Schrittwinkel hinzugefügt wurden.
Variabler Reluktanz-Stepper
Ein Schrittmotor mit variabler Reluktanz beruht auf dem magnetischen Fluss, der den Weg mit der niedrigsten Reluktanz durch einen magnetischen Kreis sucht. Dies bedeutet, dass sich ein unregelmäßig geformter weichmagnetischer Rotor bewegt, um einen Magnetkreis zu schließen, wodurch die Länge eines Luftspalts mit hohem Reluktanz minimiert wird.
Der Stator hat normalerweise drei Wicklungen, die auf Polpaare verteilt sind, der Rotor vier ausgeprägte Pole, was einen 30° . ergibt Schrittwinkel. Ein stromloser Stepper ohne Rastmoment bei Handdrehung ist als Stepper mit variabler Reluktanz zu erkennen.
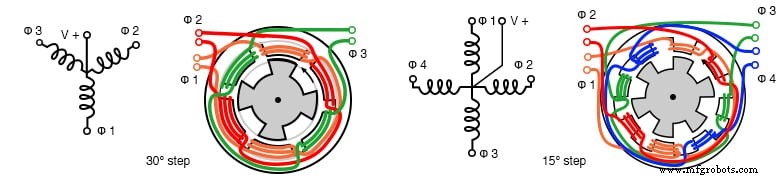
Dreiphasen- und Vierphasen-Schrittmotoren mit variabler Reluktanz
Die Antriebswellenformen für den 3-φ-Schrittmotor sind im Abschnitt „Reluktanzmotor“ zu sehen. Der Antrieb für einen 4-φ-Stepper ist in der Abbildung unten dargestellt. Das sequentielle Umschalten der Statorphasen erzeugt ein rotierendes Magnetfeld, dem der Rotor folgt.
Aufgrund der geringeren Anzahl von Rotorpolen bewegt sich der Rotor jedoch bei jedem Schritt weniger als der Statorwinkel. Für einen Schrittmotor mit variabler Reluktanz ist der Schrittwinkel gegeben durch:
ΘS =360o/NS ΘR =360o/NR ΘST =ΘR - ΘS wobei:ΘS =Statorwinkel, ΘR =Rotorwinkel, ΘST =Schrittwinkel NS =Anzahl Statorpole, NP =Anzahl Rotorpole
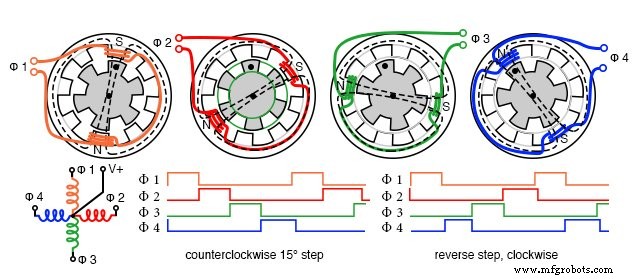
Schrittsequenz für Stepper mit variabler Reluktanz
In der obigen Abbildung dreht sich das Statormagnetfeld von φ1 zu φ2 usw. im Uhrzeigersinn. Der Rotor bewegt sich gegen den Uhrzeigersinn (CCW). Beachten Sie, was nicht passiert! Der gepunktete Rotorzahn wandert nicht zum nächsten Statorzahn. Stattdessen zieht das φ2-Statorfeld bei der Bewegung des Rotors gegen den Uhrzeigersinn einen anderen Zahn an, der einen kleineren Winkel hat (15° ) als der Statorwinkel von 30° .
Der Rotorzahnwinkel von 45° geht in die Berechnung nach obiger Gleichung ein. Der Rotor bewegte sich bei 45° . gegen den Uhrzeigersinn zum nächsten Rotorzahn , aber um 30° . an einem CW ausgerichtet Statorzahn. Somit ist der tatsächliche Schrittwinkel die Differenz zwischen einem Statorwinkel von 45° und einem Rotorwinkel von 30°.
Wie weit würde sich der Stepper drehen, wenn Rotor und Stator die gleiche Zähnezahl hätten? Null – keine Notation.
Beginnend im Ruhezustand mit eingeschalteter Phase φ1 sind drei Impulse erforderlich (φ2, φ3, φ4), um den „gestrichelten“ Rotorzahn mit dem nächsten CCW-Statorzahn auszurichten, der 45° . beträgt . Bei 3 Pulsen pro Statorzahn und 8-Statorzähnen bewegen 24 Pulse oder Schritte den Rotor um 360° .
Durch Umkehren der Pulsfolge wird die Drehrichtung oben rechts umgekehrt. Die Richtung, Schrittrate und eine Anzahl von Schritten werden von einem Schrittmotor-Controller gesteuert, der einen Treiber oder Verstärker speist. Dies könnte zu einer einzigen Platine kombiniert werden.
Der Controller könnte ein Mikroprozessor oder eine spezialisierte integrierte Schaltung sein. Der Treiber ist kein linearer Verstärker, sondern ein einfacher Ein-Aus-Schalter, der einen ausreichend hohen Strom liefern kann, um den Stepper mit Energie zu versorgen. Im Prinzip könnte der Treiber ein Relais oder sogar ein Kippschalter für jede Phase sein. In der Praxis besteht der Treiber entweder aus diskreten Transistorschaltern oder einer integrierten Schaltung.
Sowohl Treiber als auch Controller können zu einer einzigen integrierten Schaltung kombiniert werden, die einen direkten Befehl und einen Schrittimpuls akzeptiert. Es gibt Strom nacheinander an die richtigen Phasen aus.
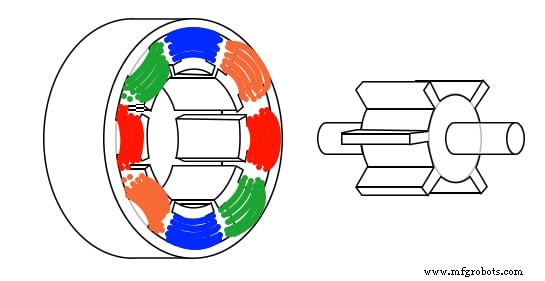
Schrittmotor mit variabler Reluktanz
Sie können einen Reluktanz-Stepper zerlegen, um die internen Komponenten anzuzeigen. Der interne Aufbau eines Schrittmotors mit variabler Reluktanz ist in der obigen Abbildung dargestellt. Der Rotor weist hervorstehende Pole auf, so dass sie beim Schalten vom rotierenden Statorfeld angezogen werden können. Ein tatsächlicher Motor ist viel länger als unsere vereinfachte Darstellung.
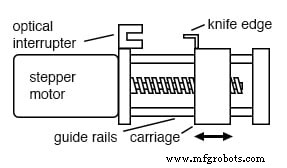
Variable Reluktanz-Schrittmotor-Antriebsspindel
Die Welle ist häufig mit einer Antriebsschraube ausgestattet (Abbildung oben). Dies kann die Köpfe eines Diskettenlaufwerks auf Befehl des Diskettenlaufwerk-Controllers bewegen.
Schrittmotoren mit variabler Reluktanz werden eingesetzt, wenn nur ein moderates Drehmoment erforderlich ist und ein grober Schrittwinkel ausreichend ist. Ein Schraubenantrieb, wie er in einem Diskettenlaufwerk verwendet wird, ist eine solche Anwendung. Wenn die Steuerung hochfährt, kennt sie die Position des Schlittens nicht.
Es kann jedoch den Schlitten in Richtung des optischen Unterbrechers fahren und die Position kalibrieren, an der die Messerschneide den Unterbrecher als „Ausgangspunkt“ schneidet. Ab dieser Position zählt die Steuerung Schrittimpulse. Solange das Lastdrehmoment das Motordrehmoment nicht überschreitet, kennt die Steuerung die Schlittenposition.
Zusammenfassung:Schrittmotor mit variabler Reluktanz
- Der Rotor ist ein Weicheisenzylinder mit ausgeprägten (hervorstehenden) Polen.
- Dies ist der am wenigsten komplexe und kostengünstigste Schrittmotor.
- Der einzige Schrittmotor ohne Rastmoment bei Handdrehung einer stromlosen Motorwelle.
- Großer Schrittwinkel
- Für eine lineare Schrittbewegung wird oft eine Leitspindel an der Welle montiert.
Permanentmagnet-Stepper
Ein Permanentmagnet-Schrittmotor hat einen zylindrischen Permanentmagnet-Rotor. Der Stator hat normalerweise zwei Wicklungen. Die Wicklungen könnten mittig angezapft werden, um eine unipolare zu ermöglichen Treiberschaltung, bei der die Polarität des Magnetfelds durch Umschalten einer Spannung von einem Ende der Wicklung zum anderen geändert wird.
Ein bipolares Um Wicklungen ohne Mittelanzapfung mit Strom zu versorgen, ist ein Antrieb mit wechselnder Polarität erforderlich. Ein reiner Permanentmagnet-Stepper hat meist einen großen Schrittwinkel. Die Drehung der Welle eines stromlosen Motors weist ein Rastmoment auf. Wenn der Rastwinkel groß ist, sagen wir 7,5° auf 90° , es ist wahrscheinlich eher ein Permanentmagnet-Stepper als ein Hybrid-Stepper.
Permanentmagnet-Schrittmotoren erfordern phasengesteuerte Wechselströme, die an die zwei (oder mehr) Wicklungen angelegt werden. In der Praxis sind dies fast immer Rechteckwellen, die von der Festkörperelektronik aus Gleichstrom erzeugt werden.
Die bipolare Antrieb sind Rechteckwellen, die zwischen (+) und (-) Polaritäten wechseln, z. B. +2,5 V bis -2,5 V. Unipolar Der Antrieb liefert einen (+) und (-) abwechselnden magnetischen Fluss an die Spulen, der aus einem Paar positiver Rechteckwellen entwickelt wird, die an gegenüberliegende Enden einer mittig angezapften Spule angelegt werden. Das Timing der bipolaren oder unipolaren Welle ist Wave Drive, Full Step oder Half Step.
Wave Drive
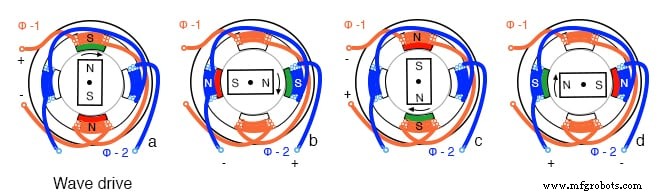
PM-Wave-Drive-Sequenz (a) φ1+ , (b) φ2+ , (c) φ1- , (d) φ2-
Der konzeptionell einfachste Antrieb ist der Wellenantrieb . Die Drehfolge von links nach rechts ist positiv φ-1 zeigt Rotornordpol oben, (+) φ-2 zeigt Rotornord rechts, negatives φ-1 zieht Rotornordpol nach unten, (-) φ-2 zeigt Rotor links. Die Wellenformen unten zeigen, dass jeweils nur eine Spule erregt wird. Dies ist zwar einfach, erzeugt jedoch nicht so viel Drehmoment wie andere Antriebstechniken.
Wellenformen:bipolarer Wellenantrieb
Die Wellenformen (Abbildung oben) sind bipolar, da beide Polaritäten (+) und (-) den Stepper antreiben. Das Spulenmagnetfeld kehrt sich um, weil sich die Polarität des Antriebsstroms umkehrt.
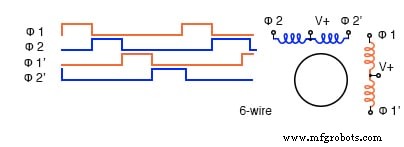
Wellenformen:unipolarer Wellenantrieb
Die Wellenformen (Abbildung oben) sind unipolar, da nur eine Polarität erforderlich ist. Dies vereinfacht die Antriebselektronik, erfordert aber doppelt so viele Treiber. Es gibt doppelt so viele Wellenformen, weil ein Paar (+)-Wellen erforderlich ist, um ein magnetisches Wechselfeld durch Anlegen an gegenüberliegende Enden einer Spule mit Mittenabgriff zu erzeugen.
Der Motor benötigt magnetische Wechselfelder. Diese können entweder durch unipolare oder bipolare Wellen erzeugt werden. Motorspulen müssen jedoch Mittelanzapfungen für den unipolaren Antrieb haben.
Permanentmagnet-Schrittmotoren werden mit verschiedenen Anschlusskabelkonfigurationen hergestellt.
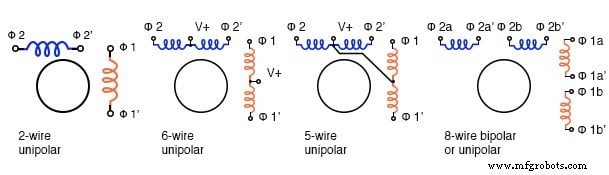
Schaltpläne für Schrittmotoren
- Der 4-Draht-Motor kann nur durch bipolare Wellenformen angetrieben werden.
- Der 6-Draht-Motor, die gebräuchlichste Anordnung, ist wegen der Mittelanzapfung für unipolaren Antrieb vorgesehen. Es kann jedoch durch bipolare Wellen angetrieben werden, wenn die Mittelabgriffe ignoriert werden.
- Der 5-Draht-Motor kann nur mit unipolaren Wellen betrieben werden, da der gemeinsame Mittelabgriff stört, wenn beide Wicklungen gleichzeitig bestromt werden.
- Die 8-Draht-Konfiguration ist selten, bietet aber maximale Flexibilität. Es kann für einen unipolaren Antrieb wie für den 6-Leiter- oder 5-Leiter-Motor verdrahtet werden. Ein Spulenpaar kann für eine bipolare Hochspannungsansteuerung mit niedrigem Strom in Reihe oder für eine Niederspannungs-Hochstromansteuerung parallel geschaltet werden.
Eine bifilare Wicklung wird hergestellt, indem die Spulen mit zwei Drähten parallel gewickelt werden, oft ein roter und grüner Lackdraht. Dieses Verfahren erzeugt exakte 1:1-Windungsverhältnisse für mittig angezapfte Wicklungen. Diese Wickelmethode ist auf alle außer der obigen 4-Draht-Anordnung anwendbar.
Vollschrittfahrt
Vollschritt Antrieb bietet mehr Drehmoment als Wellenantrieb, da beide Spulen gleichzeitig erregt werden. Dadurch werden die Rotorpole in der Mitte zwischen den beiden Feldpolen angezogen. (Abbildung unten)
Vollschritt, bipolarer Antrieb
Der bipolare Vollschrittantrieb hat, wie oben gezeigt, den gleichen Schrittwinkel wie der Wellenantrieb. Eine unipolare Ansteuerung (nicht gezeigt) würde ein Paar unipolarer Wellenformen für jede der obigen bipolaren Wellenformen erfordern, die an die Enden einer mittig angezapften Wicklung angelegt werden. Der unipolare Antrieb verwendet eine weniger komplexe, kostengünstigere Treiberschaltung. Die Mehrkosten des bipolaren Antriebs sind gerechtfertigt, wenn mehr Drehmoment benötigt wird.
Halbschrittfahrt
Der Schrittwinkel für eine gegebene Schrittmotorgeometrie wird mit Halbschritt . halbiert Antrieb. Dies entspricht doppelt so vielen Schrittimpulsen pro Umdrehung. (Abbildung unten) Halbschritt bietet eine höhere Auflösung bei der Positionierung der Motorwelle.
Zum Beispiel würde ein halber Schritt des Motors, der den Druckkopf über das Papier eines Tintenstrahldruckers bewegt, die Punktdichte verdoppeln.
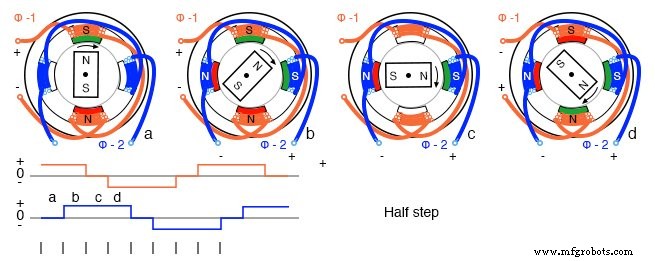
Halbschritt, bipolarer Antrieb
Halbschrittantrieb ist eine Kombination aus Wellenantrieb und Vollschrittantrieb, wobei eine Wicklung erregt wird, gefolgt von beiden Wicklungen erregt, was doppelt so viele Schritte ergibt. Die unipolaren Wellenformen für den Halbschrittantrieb sind oben gezeigt. Der Rotor richtet sich wie beim Wellenantrieb mit den Feldpolen und beim Vollschrittantrieb zwischen den Polen aus.
Microstepping ist mit speziellen Controllern möglich. Durch Variation der Ströme zu den Wicklungen können sinusförmig viele Mikroschritte zwischen den Normallagen interpoliert werden. Der Aufbau eines Permanentmagnet-Schrittmotors unterscheidet sich erheblich von den obigen Zeichnungen.
Es ist wünschenswert, die Anzahl der Pole über die dargestellte hinaus zu erhöhen, um einen kleineren Schrittwinkel zu erzeugen. Es ist auch wünschenswert, die Anzahl der Wicklungen zu reduzieren oder zumindest die Anzahl der Wicklungen nicht zu erhöhen, um die Herstellung zu erleichtern.
Bau
Der Aufbau eines Permanentmagnet-Schrittmotors unterscheidet sich erheblich von den obigen Zeichnungen. Es ist wünschenswert, die Anzahl der Pole über die dargestellte hinaus zu erhöhen, um einen kleineren Schrittwinkel zu erzeugen. Es ist auch wünschenswert, die Anzahl der Wicklungen zu reduzieren oder zumindest die Anzahl der Wicklungen nicht zu erhöhen, um die Herstellung zu erleichtern.
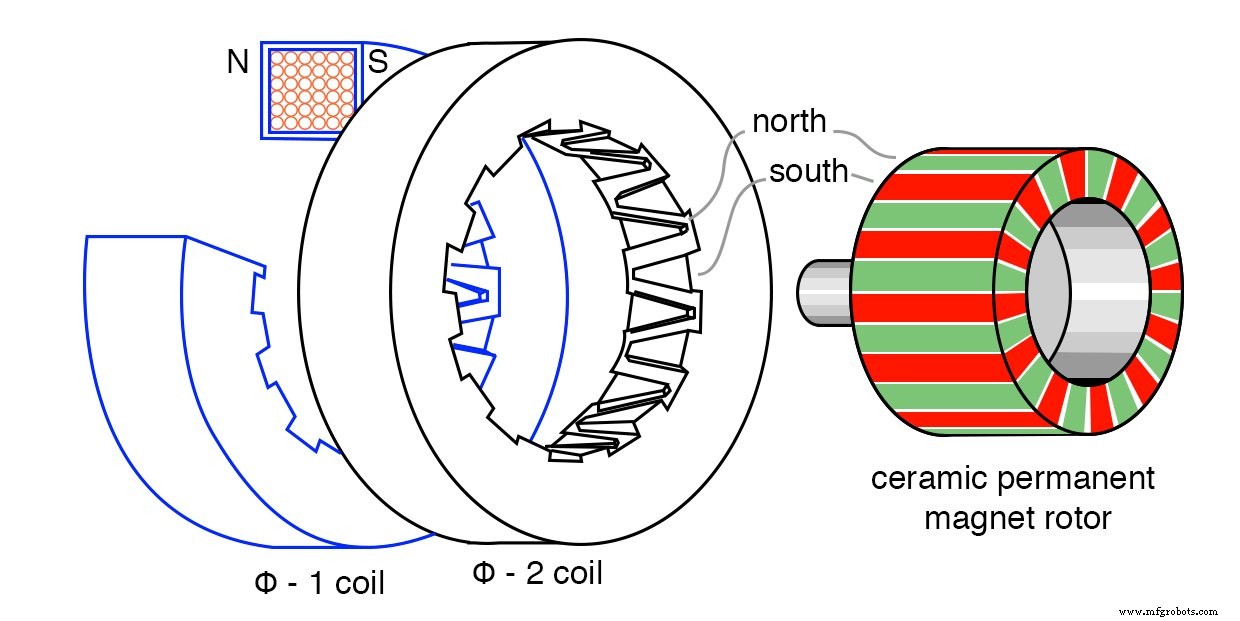
Permanentmagnet-Schrittmotor, 24-polige Can-Stack-Konstruktion
Der Permanentmagnet-Stepper hat nur zwei Wicklungen, hat aber in jeder der zwei Phasen 24 Pole. Diese Bauweise ist als kann stapeln bekannt . Eine Phasenwicklung wird mit einer Weichstahlhülle umwickelt, wobei die Finger in die Mitte gebracht werden.
Eine Phase wird vorübergehend eine Nordseite und eine Südseite haben. Jede Seite wickelt sich mit zwölf ineinandergreifenden Fingern für insgesamt 24 Pole um die Mitte des Donuts. Diese abwechselnden Nord-Süd-Finger ziehen den Permanentmagnet-Rotor an.
Wenn die Polarität der Phase umgekehrt würde, würde der Rotor um 360° . springen /24 =15° . Wir wissen nicht, in welche Richtung, welche nicht sinnvoll ist. Wenn wir jedoch φ-1 gefolgt von φ-2 aktivieren, bewegt sich der Rotor um 7,5° weil φ-2 um 7,5° . versetzt (gedreht) ist von φ-1. Siehe unten für Versatz. Und es dreht sich in eine reproduzierbare Richtung, wenn die Phasen abgewechselt werden.
Die Anwendung einer der oben genannten Wellenformen dreht den Permanentmagnetrotor.
Beachten Sie, dass der Rotor ein grauer Ferrit-Keramikzylinder ist, der im gezeigten 24-Pol-Muster magnetisiert ist. Dies kann mit Magnetbetrachterfolie oder Eisenspäne auf einer Papierumhüllung betrachtet werden. Die Farben des Films sind jedoch sowohl für den Nord- als auch für den Südpol grün.
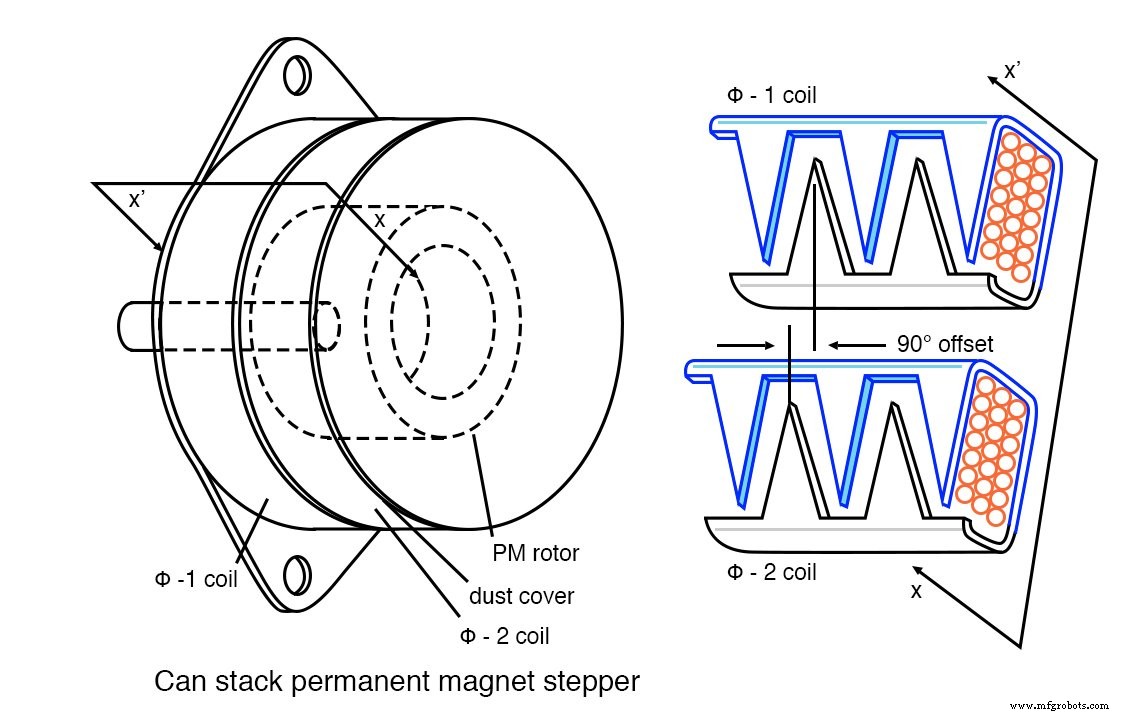
(a) Außenansicht des Dosenstapels, (b) Feldversatzdetail
Der Aufbau eines PM-Steppers im Can-Stack-Stil ist unverwechselbar und leicht an den gestapelten „Dosen“ zu erkennen (Abbildung oben). Beachten Sie den Rotationsversatz zwischen den zweiphasigen Abschnitten. Dies ist der Schlüssel, damit der Rotor dem Wechsel der Felder zwischen den beiden Phasen folgt.
Zusammenfassung:Permanentmagnet-Schrittmotor
- Der Rotor ist ein Permanentmagnet, oft eine mit zahlreichen Polen magnetisierte Ferrithülse.
- Die Can-Stack-Konstruktion bietet zahlreiche Pole aus einer einzigen Spule mit verschachtelten Fingern aus Weicheisen.
- Großer bis mittlerer Schrittwinkel.
- Wird oft in Computerdruckern verwendet, um das Papier vorzuschieben.
Hybrid-Schrittmotor
Der Hybrid-Schrittmotor kombiniert die Merkmale des Steppers mit variabler Reluktanz und des Permanentmagnet-Steppers, um einen kleineren Schrittwinkel zu erzeugen. Der Rotor ist ein zylindrischer Permanentmagnet, der mit radialen Weicheisenzähnen entlang der Achse magnetisiert ist.
Die Statorspulen sind auf Wechselpolen mit entsprechenden Zähnen gewickelt. Typischerweise sind zwei Wicklungsstränge auf Polpaare verteilt. Diese Wicklung kann für einen unipolaren Antrieb mittig angezapft werden. Die Mittelanzapfung wird durch eine bifilare Wicklung erreicht , ein Paar Drähte, die physisch parallel gewickelt, aber in Reihe geschaltet sind.
Die Nord-Süd-Pole einer Phase tauschen die Polarität, wenn der Phasentreiberstrom umgekehrt wird. Der bipolare Antrieb wird für nicht angezapfte Wicklungen benötigt.
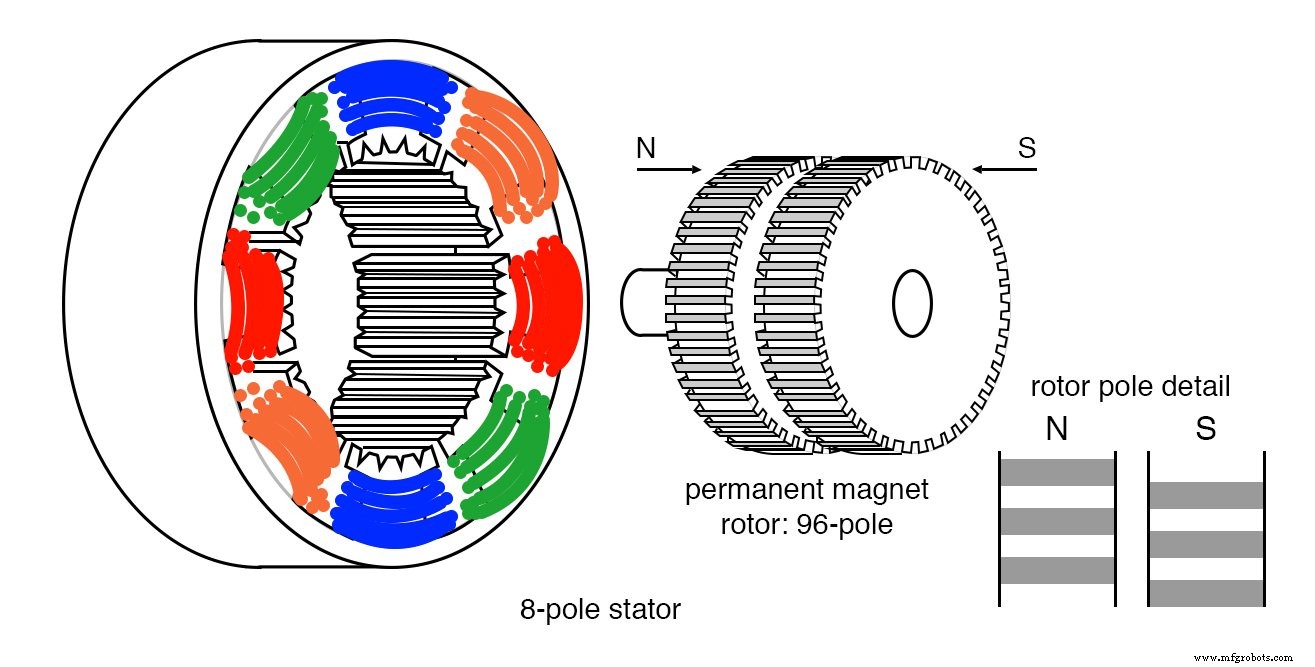
Hybrid-Schrittmotor
Beachten Sie, dass die 48 Zähne eines Rotorabschnitts um eine halbe Teilung vom anderen versetzt sind. (Siehe Details zu den Rotorpolen oben. Dieser Rotorzahnversatz wird auch unten gezeigt.) Aufgrund dieses Versatzes hat der Rotor effektiv 96 verschachtelte Pole entgegengesetzter Polarität.
Dieser Offset ermöglicht eine Drehung in Schritten von 1/96 einer Umdrehung durch Umkehren der Feldpolarität einer Phase. Zweiphasige Wicklungen sind üblich, wie oben und unten gezeigt. Es kann jedoch bis zu fünf Phasen geben.
Die Statorzähne an den 8-Polen entsprechen den 48-Rotorzähnen, bis auf fehlende Zähne im Zwischenraum der Pole. Somit kann ein Pol des Rotors, beispielsweise der Südpol, mit dem Stator in 48 verschiedenen Positionen ausgerichtet sein. Allerdings sind die Zähne des Südpols von den Nordzähnen um einen halben Zahn versetzt.
Daher kann der Rotor in 96 verschiedenen Positionen mit dem Stator ausgerichtet sein. Dieser halbe Zahnversatz wird im Rotorpoldetail oben oder in der Abbildung unten angezeigt.
Als ob dies nicht kompliziert genug wäre, sind die Statorhauptpole in zwei Phasen (φ-1, φ-2) unterteilt. Diese Statorphasen sind um einen Viertelzahn gegeneinander versetzt. Dieses Detail ist nur auf den folgenden schematischen Diagrammen erkennbar. Das Ergebnis ist, dass sich der Rotor bei abwechselnder Bestromung der Phasen in Schritten von einem Viertel eines Zahns bewegt.
Mit anderen Worten, der Rotor bewegt sich für den obigen Schrittmotor in 2 × 96 =192 Schritten pro Umdrehung.
Die obige Zeichnung ist repräsentativ für einen tatsächlichen Hybridschrittmotor. Wir stellen jedoch eine vereinfachte bildliche und schematische Darstellung zur Verfügung, um Details zu veranschaulichen, die oben nicht offensichtlich sind. Beachten Sie der Einfachheit halber die reduzierte Anzahl von Spulen und Zähnen in Rotor und Stator.
In den nächsten beiden Abbildungen versuchen wir, die Viertelzahndrehung, die durch die beiden um einen Viertelzahn versetzten Statorphasen erzeugt wird, und den halben Zahnversatz des Rotors darzustellen. Der Statorversatz von viertel Zähnen in Verbindung mit dem Timing des Antriebsstroms definiert auch die Drehrichtung.
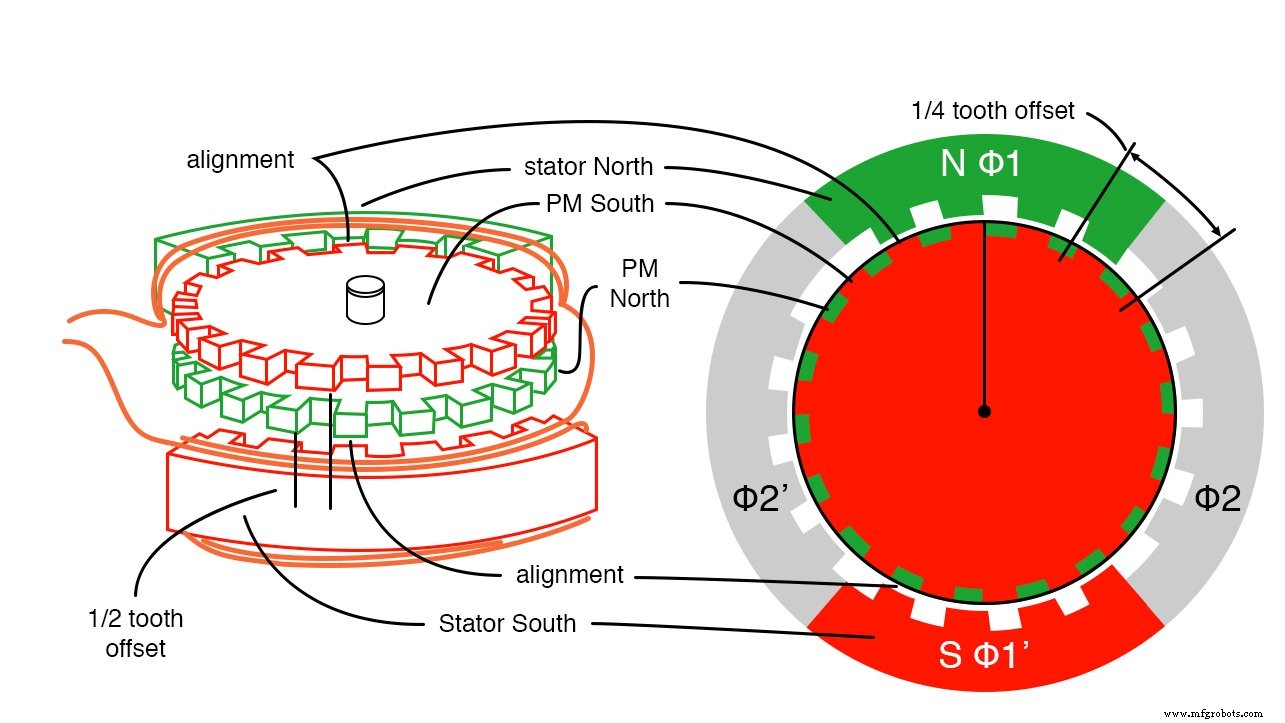
Schaltplan des Hybrid-Schrittmotors
Funktionen des Hybrid-Stepper-Schemas
- Die Oberseite des Permanentmagnetrotors ist der Südpol, die Unterseite der Norden.
- Die Nord-Süd-Zähne des Rotors sind um einen halben Zahn versetzt.
- Wenn der φ-1-Stator vorübergehend erregt wird, Norden oben, Süden unten.
- Die oberen φ-1 Statorzähne richten sich nach Norden zu den oberen südlichen Rotorzähnen aus.
- Die unteren φ-1’ Statorzähne sind nach Süden mit den unteren Nordzähnen des Rotors ausgerichtet.
- Ein ausreichendes Drehmoment, das auf die Welle ausgeübt wird, um das Haltedrehmoment zu überwinden, würde den Rotor um einen Zahn bewegen.
- Wenn die Polarität von φ-1 umgekehrt würde, würde sich der Rotor um einen halben Zahn bewegen, Richtung unbekannt. Die Ausrichtung wäre Südstator oben nach Nordrotor unten, Nordstator unten nach Südrotor.
- Die -2 Statorzähne sind nicht mit den Rotorzähnen ausgerichtet, wenn φ-1 erregt wird. Tatsächlich sind die -2 Statorzähne um einen Viertelzahn versetzt. Dies ermöglicht eine Drehung um diesen Betrag, wenn φ-1 entregt und φ-2 erregt ist. Die Polarität von φ-1 und Antrieb bestimmen die Drehrichtung.
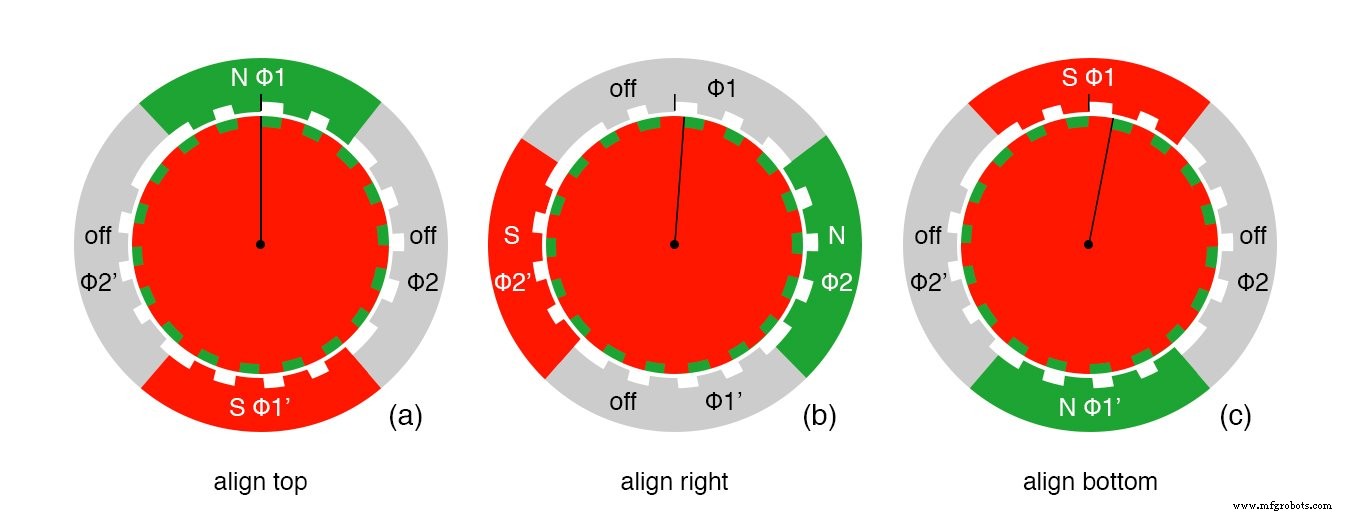
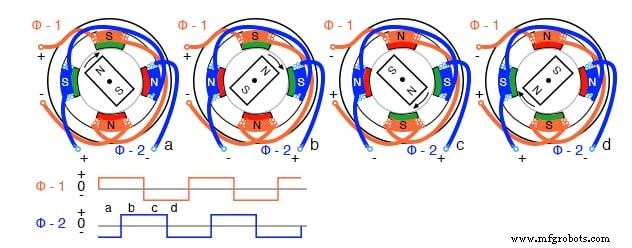
Hybrid-Schrittmotor-Rotationssequenz
Hybrid-Schrittmotordrehung
- Rotor oben ist Permanentmagnet Süden, unten Norden. Felder φ1, φ-2 sind umschaltbar:ein, aus, rückwärts.
- (a) φ-1=ein=Nord-Oberseite, φ-2=aus. Ausrichten (von oben nach unten): φ-1 Stator-N:Rotor-oben-S, φ-1’ Stator-S:Rotor-unten-N. Startposition, Drehung=0.
- (b) -1=aus, φ-2=ein. Ausrichten (von rechts nach links): φ-2 Stator-N-rechts:Rotor-oben-S, φ-2’ Stator-S:Rotor-unten-N. 1/4 Zahn drehen, Gesamtdrehung=1/4 Zahn.
- (c) φ-1=rückwärts(ein), φ-2=aus. Ausrichten (von unten nach oben): φ-1 Stator-S:Rotor-unten-N, φ-1’ Stator-N:Rotor-oben-S. 1/4 Zahn aus der letzten Position drehen. Gesamtdrehung ab Start:1/2 Zahn.
- Nicht gezeigt:φ-1=aus, φ-2=rückwärts(ein). Ausrichten (von links nach rechts): Gesamtdrehung:3/4 Zähne.
- Nicht gezeigt:φ-1=ein, φ-2=aus (wie (a)). Ausrichten (von oben nach unten): Gesamtrotation 1-Zahn.
Ein stromloser Schrittmotor mit Rastmoment ist entweder ein Permanentmagnet-Schrittmotor oder ein Hybrid-Schrittmotor. Der Hybrid-Stepper hat einen kleinen Schrittwinkel, viel weniger als 7,5° von Permanentmagnet-Steppern. Der Schrittwinkel könnte ein Bruchteil eines Grades sein, was einigen hundert Schritten pro Umdrehung entspricht. Zusammenfassung:Hybrider Schrittmotor
- Der Schrittwinkel ist kleiner als bei Steppern mit variabler Reluktanz oder Permanentmagneten.
- Der Rotor ist ein Permanentmagnet mit feinen Zähnen. Nord- und Südzähne sind für einen kleineren Schrittwinkel um einen halben Zahn versetzt.
- Die Statorpole haben passende feine Zähne mit der gleichen Teilung wie der Rotor.
- Die Statorwicklungen sind in nicht weniger als zwei Phasen unterteilt.
- Die Pole einer Statorwicklung sind für einen noch kleineren Schrittwinkel um einen Viertelzahn versetzt.
VERWANDTES ARBEITSBLATT:
- Arbeitsblatt für Schrittmotoren
Industrietechnik
- Einphasen-Asynchronmotoren
- AC-Kommutatormotoren
- Nanotec:kompakte Motorsteuerung für bürstenlose Gleichstrommotoren und Schrittmotoren
- Technischer Tipp:Motoren
- Die Grauzone zwischen Servo- und Schrittmotoren
- Elektromotorsicherheit:Verschiedene Phasen und Sicherheitsmaßnahmen
- 4 Hauptarten von Wicklungsfehlern bei AC-Elektromotoren
- Über Industriemotoren und Anwendungen
- Eine Einführung in den BLDC-Motor
- Richtige Wartung von Kompressormotoren