


AC-Kommutatormotoren
Die erste Aufgabe von Charles Proteus Steinmetz nach seiner Ankunft in Amerika bestand darin, Probleme bei der Konstruktion der Wechselstromversion des Bürstenkollektormotors zu untersuchen. Die Situation war so schlimm, dass Motoren nicht vor dem eigentlichen Bau konstruiert werden konnten.
Der Erfolg oder Misserfolg eines Motordesigns ist nicht bekannt, bis es tatsächlich gebaut und getestet wird. Er formulierte die Gesetze der magnetischen Hysterese beim Finden einer Lösung. Hysterese ist ein Nacheilen der magnetischen Feldstärke im Vergleich zur Magnetisierungskraft. Dies führt zu einem Verlust, der bei Gleichstrommagneten nicht vorhanden ist.
Legierungen mit geringer Hysterese und Aufbrechen der Legierung in dünne isolierte Lamellen ermöglichte es, AC-Kommutatormotoren vor dem Bau genau zu konstruieren.
Wechselstrom-Kommutatormotoren haben wie vergleichbare Gleichstrommotoren ein höheres Anlaufdrehmoment und eine höhere Drehzahl als Wechselstrom-Induktionsmotoren.
Der Reihenmotor arbeitet deutlich über der Synchrondrehzahl eines herkömmlichen Wechselstrommotors. Wechselstrom-Kommutatormotoren können entweder einphasig oder mehrphasig sein. Die einphasige AC-Version leidet unter einer doppelten Netzfrequenz-Drehmomentpulsation, die beim mehrphasigen Motor nicht vorhanden ist.
Da ein Kommutatormotor mit einer viel höheren Geschwindigkeit arbeiten kann als ein Induktionsmotor, kann er mehr Leistung abgeben als ein Induktionsmotor ähnlicher Größe. Kommutatormotoren sind jedoch aufgrund des Bürsten- und Kommutatorverschleißes nicht so wartungsfrei wie Induktionsmotoren.
Einphasen-Reihenmotor
Wird ein DC-Reihenmotor mit laminiertem Feld an AC angeschlossen, reduziert die nacheilende Reaktanz der Feldspule den Feldstrom erheblich. Während sich ein solcher Motor dreht, ist der Betrieb marginal.
Beim Start sehen Ankerwicklungen, die mit den durch die Bürsten kurzgeschlossenen Kommutatorsegmenten verbunden sind, wie kurzgeschlossene Transformatorwindungen für das Feld aus. Dies führt zu erheblichen Lichtbögen und Funkenbildung an den Bürsten, wenn sich der Anker zu drehen beginnt.
Dies ist mit zunehmender Drehzahl weniger problematisch, wodurch Lichtbögen und Funken zwischen den Kommutatorsegmenten verteilt werden. Die nacheilende Reaktanz und die Lichtbogenbürsten sind nur bei sehr kleinen unkompensierten Wechselstrommotoren, die mit hoher Geschwindigkeit betrieben werden, tolerierbar. AC-Motoren der Serie, die kleiner als Handbohrmaschinen und Küchenmischer sind, können nicht kompensiert werden. (Abbildung unten)
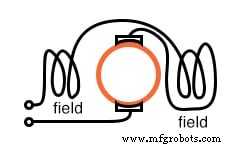
Unkompensierter AC-Reihenmotor
Kompensierter Reihenmotor
Die Lichtbogen- und Funkenbildung wird durch das Anbringen einer Kompensationswicklung gemildert der Stator in Reihe mit dem Anker so positioniert, dass seine magnetomotorische Kraft (mmf) den Ankerwechselstrom mmf aufhebt.
Ein kleinerer Motorluftspalt und weniger Feldumdrehungen reduzieren die nacheilende Reaktanz in Reihe mit dem Anker und verbessern den Leistungsfaktor. Alle bis auf sehr kleine Wechselstrom-Kommutatormotoren verwenden Kompensationswicklungen. Motoren, die so groß wie die in einem Küchenmixer verwendeten oder größer sind, verwenden kompensierte Statorwicklungen.
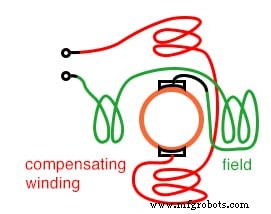
Wechselstrommotor mit kompensierter Serie
Universalmotor
Es ist möglich, kleine (unter 300 Watt) Universalmotoren zu konstruieren die entweder mit Gleichstrom oder Wechselstrom betrieben werden. Sehr kleine Universalmotoren können unkompensiert sein. Größere Universalmotoren mit höherer Drehzahl verwenden eine Ausgleichswicklung.
Ein Motor läuft bei Wechselstrom langsamer als bei Gleichstrom aufgrund der bei Wechselstrom auftretenden Reaktanz. Die Spitzen der Sinuswellen sättigen jedoch den Magnetpfad, wodurch der Gesamtfluss unter den DC-Wert sinkt und die Drehzahl des „Serien“-Motors erhöht wird.
Die Ausgleichseffekte führen somit zu einer nahezu konstanten Drehzahl von DC bis 60 Hz. Die kleinen linienbetriebenen Geräte wie Bohrmaschinen, Staubsauger und Mixer, die 3000 bis 10.000 U/min benötigen, verwenden Universalmotoren.
Die Entwicklung von Festkörpergleichrichtern und kostengünstigen Permanentmagneten macht den DC-Permanentmagnetmotor jedoch zu einer praktikablen Alternative.
Abstoßungsmotor
Ein Repulsionsmotor besteht aus einem Feld, das direkt mit der Netzwechselspannung verbunden ist, und einem Paar kurzgeschlossener Bürsten, die um 15° . versetzt sind bis 25° von der Feldachse. Das Feld induziert einen Stromfluss in den kurzgeschlossenen Anker, dessen Magnetfeld dem der Feldspulen entgegengesetzt ist.
Die Geschwindigkeit kann durch Drehen der Bürsten in Bezug auf die Feldachse gesteuert werden. Dieser Motor hat eine überlegene Kommutierung unterhalb der Synchrondrehzahl, eine minderwertige Kommutierung oberhalb der Synchrondrehzahl. Der niedrige Anlaufstrom erzeugt ein hohes Anlaufdrehmoment.
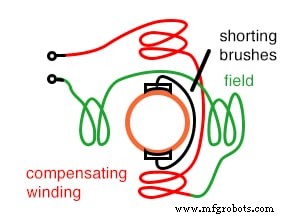
Abstoßungs-Wechselstrommotor
Abstoßungsstart-Induktionsmotor
Wenn ein Induktionsmotor eine harte Startlast wie ein Kompressor antreibt, kann das hohe Startdrehmoment des Repulsionsmotors genutzt werden. Die Rotorwicklungen des Induktionsmotors werden zum Starten durch ein Paar kurzgeschlossener Bürsten zu den Kommutatorsegmenten geführt.
Bei naher Laufgeschwindigkeit schließt ein Fliehkraftschalter alle Kommutatorsegmente kurz, wodurch die Wirkung eines Käfigläufers entsteht. Die Bürsten können auch angehoben werden, um die Lebensdauer der Bürsten zu verlängern. Das Anlaufdrehmoment beträgt 300 % bis 600 % des Werts der vollen Drehzahl im Vergleich zu weniger als 200 % bei einem reinen Induktionsmotor.
Zusammenfassung:Wechselstrom-Kommutatormotoren
- Der Einphasen-Reihenmotor ist ein Versuch, einen Motor wie einen Gleichstrom-Kommutatormotor zu bauen. Der resultierende Motor ist nur in den kleinsten Größen praktikabel.
- Durch Hinzufügen einer Kompensationswicklung entsteht der kompensierte Reihenmotor , Überwindung übermäßiger Kommutatorfunken. Die meisten Wechselstrom-Kommutatormotoren sind dieser Art. Bei hoher Drehzahl liefert dieser Motor mehr Leistung als ein gleichgroßer Induktionsmotor, ist jedoch nicht wartungsfrei.
- Es ist möglich, kleine Gerätemotoren herzustellen, die entweder mit Wechselstrom oder Gleichstrom betrieben werden. Dies ist als Universalmotor bekannt .
- Die Wechselstromleitung ist direkt mit dem Stator eines Abstoßungsmotors . verbunden wenn der Kommutator durch die Bürsten kurzgeschlossen ist.
- Einziehbare kurzgeschlossene Bürsten können einen Induktionsmotor mit gewickeltem Rotor starten. Dies ist als Abstoßungsstart-Induktionsmotor bekannt.
Industrietechnik
- Einführung in AC-Motoren
- Einphasen-Asynchronmotoren
- Technischer Tipp:Motoren
- Überdimensionierte Elektromotoren:Sollten sie ersetzt werden?
- Elektromotorsicherheit:Verschiedene Phasen und Sicherheitsmaßnahmen
- 4 Hauptarten von Wicklungsfehlern bei AC-Elektromotoren
- Über Industriemotoren und Anwendungen
- Eine Einführung in den BLDC-Motor
- 5 Gründe, warum TEFC-Motoren ausfallen
- Richtige Wartung von Kompressormotoren