


So funktionieren bürstenloser Motor und ESC
In diesem Tutorial lernen wir, wie bürstenloser Motor und ESC funktionieren. Dieser Artikel ist der erste Teil des folgenden Videos, in dem wir das Funktionsprinzip eines bürstenlosen Gleichstrommotors und ESC (Electronic Speed Controller) lernen, und im zweiten Teil lernen wir, wie man einen BLDC-Motor mit Arduino steuert.
Sie können sich das folgende Video ansehen oder das schriftliche Tutorial unten lesen.
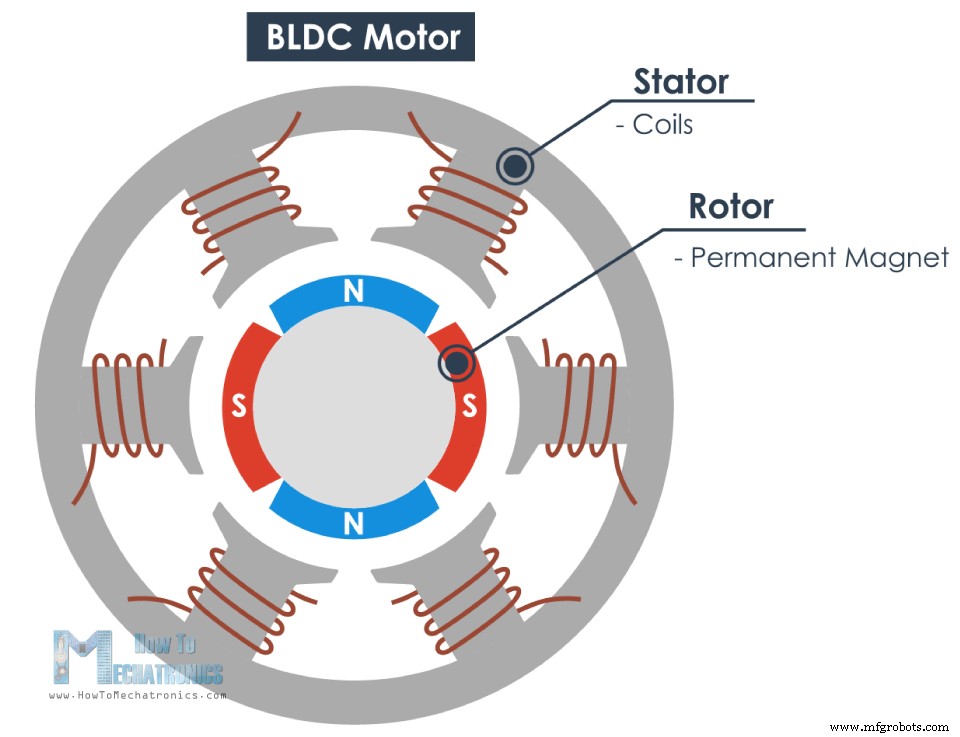
Ein BLDC-Motor besteht aus zwei Hauptteilen, einem Stator und einem Rotor. Für diese Darstellung ist der Rotor ein Permanentmagnet mit zwei Polen, während der Stator aus Spulen besteht, die wie im Bild unten gezeigt angeordnet sind.
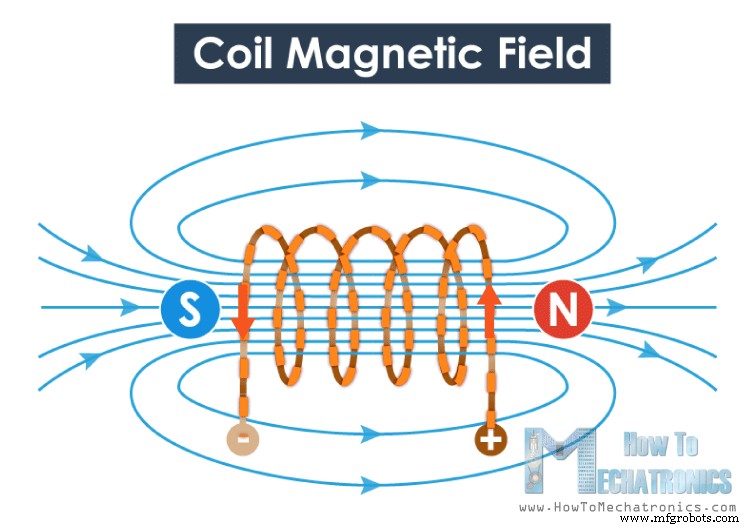
Wir alle wissen, dass, wenn wir Strom durch eine Spule leiten, ein Magnetfeld erzeugt wird und die magnetischen Feldlinien oder die Pole von der Stromrichtung abhängen.
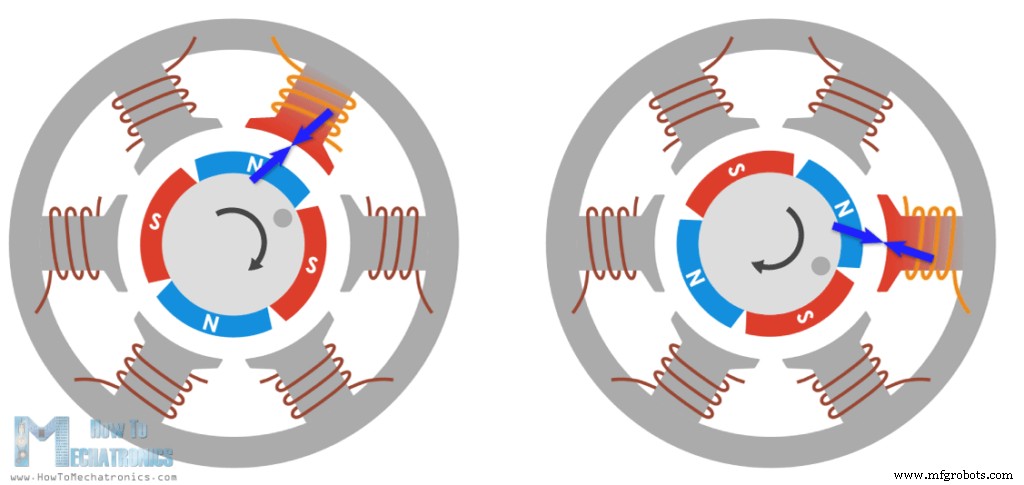
Wenn wir also den entsprechenden Strom anlegen, erzeugt die Spule ein Magnetfeld, das den Permanentmagneten des Rotors anzieht. Wenn wir nun jede Spule nacheinander aktivieren, dreht sich der Rotor aufgrund der Kraftwechselwirkung zwischen Permanent und Elektromagnet weiter.
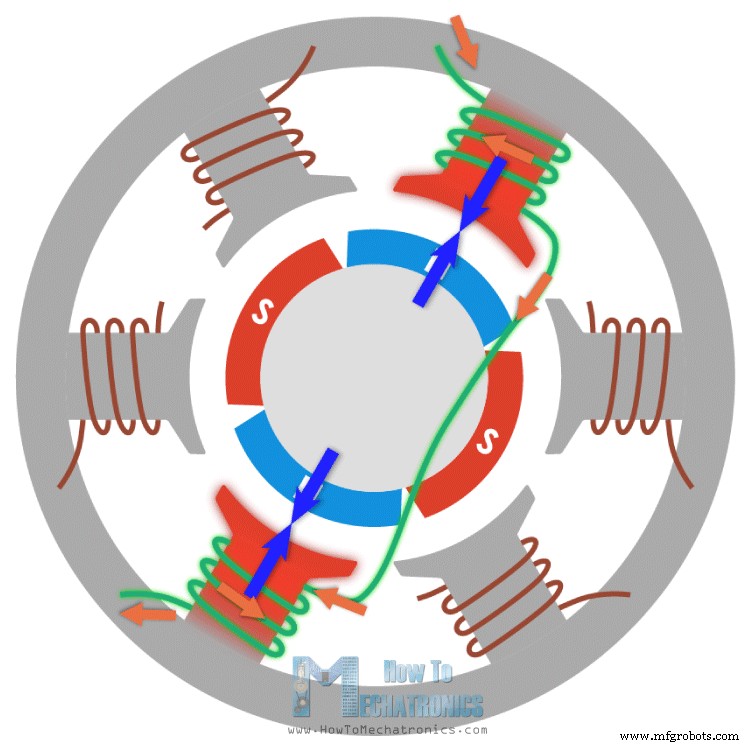
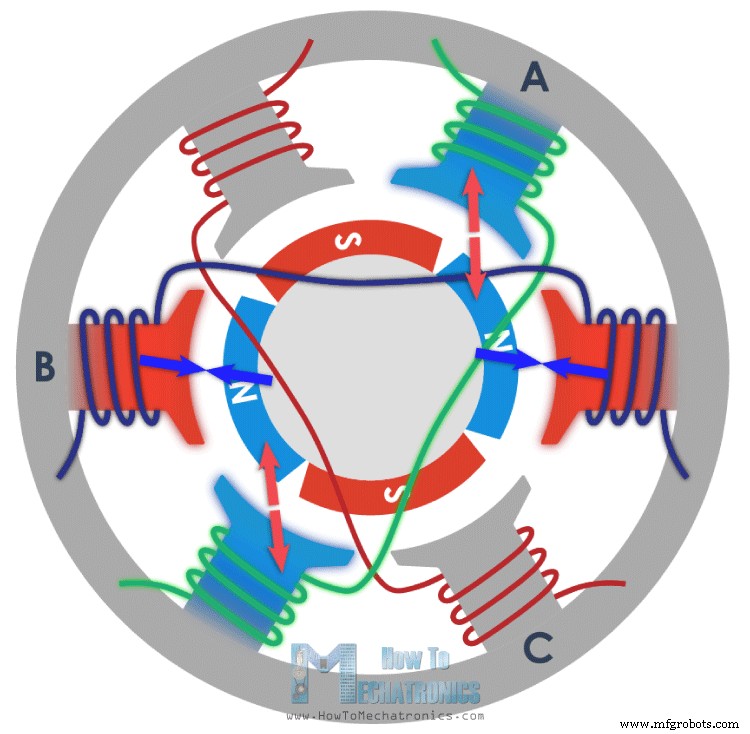
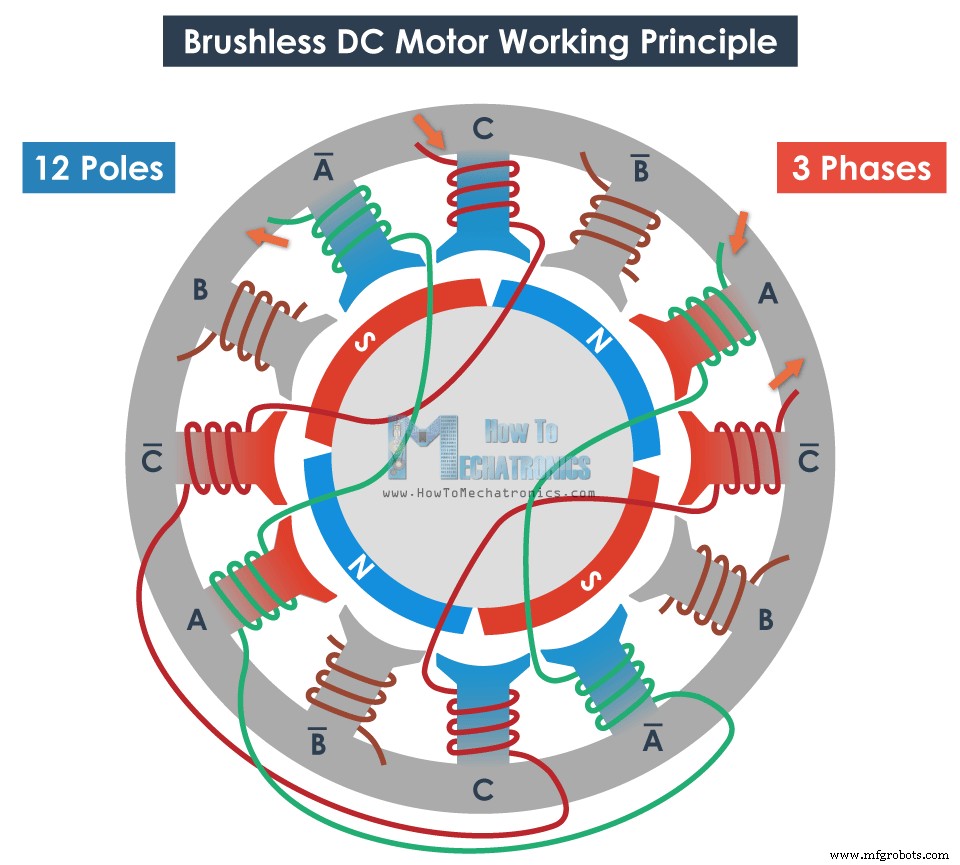
Um die Effizienz des Motors zu erhöhen, können wir zwei gegenüberliegende Spulen als eine einzige Spule so wickeln, dass entgegengesetzte Pole zu den Rotorpolen erzeugt werden, wodurch wir eine doppelte Anziehungskraft erhalten.
Mit dieser Konfiguration können wir die sechs Pole auf dem Stator mit nur drei Spulen oder Phasen erzeugen. Wir können den Wirkungsgrad weiter steigern, indem wir zwei Spulen gleichzeitig bestromen. Auf diese Weise zieht eine Spule den Rotor an und die andere Spule stößt ihn ab.
Damit der Rotor einen vollen 360-Grad-Zyklus macht, benötigt er sechs Schritte oder Intervalle.
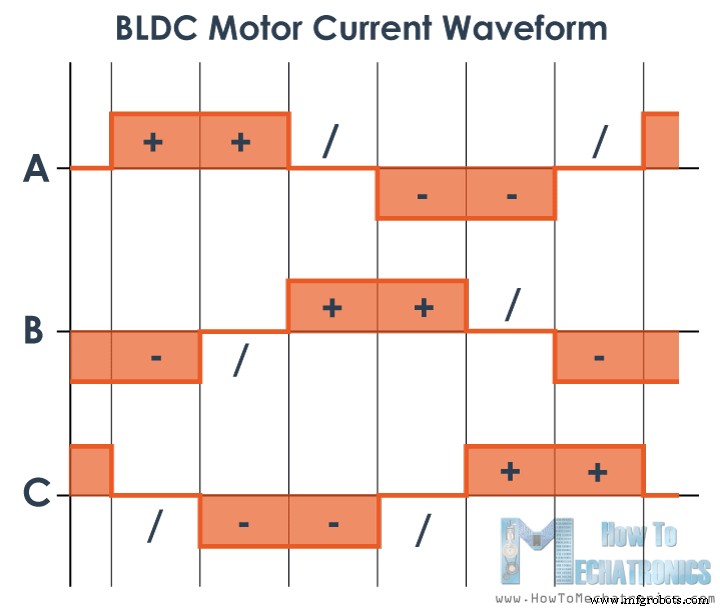
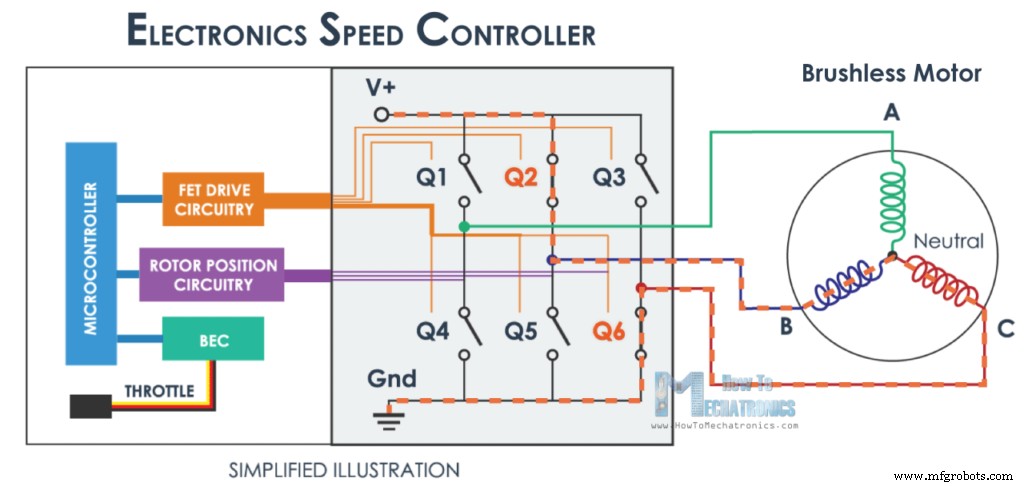
Wenn wir uns die Stromwellenform ansehen, können wir feststellen, dass in jedem Intervall eine Phase mit positivem Strom, eine Phase mit negativem Strom vorhanden ist und die dritte Phase ausgeschaltet ist. Dies gibt die Idee, dass wir die freien Endpunkte jeder der drei Phasen miteinander verbinden und so den Strom zwischen ihnen teilen oder einen einzigen Strom verwenden können, um die beiden Phasen gleichzeitig zu erregen.
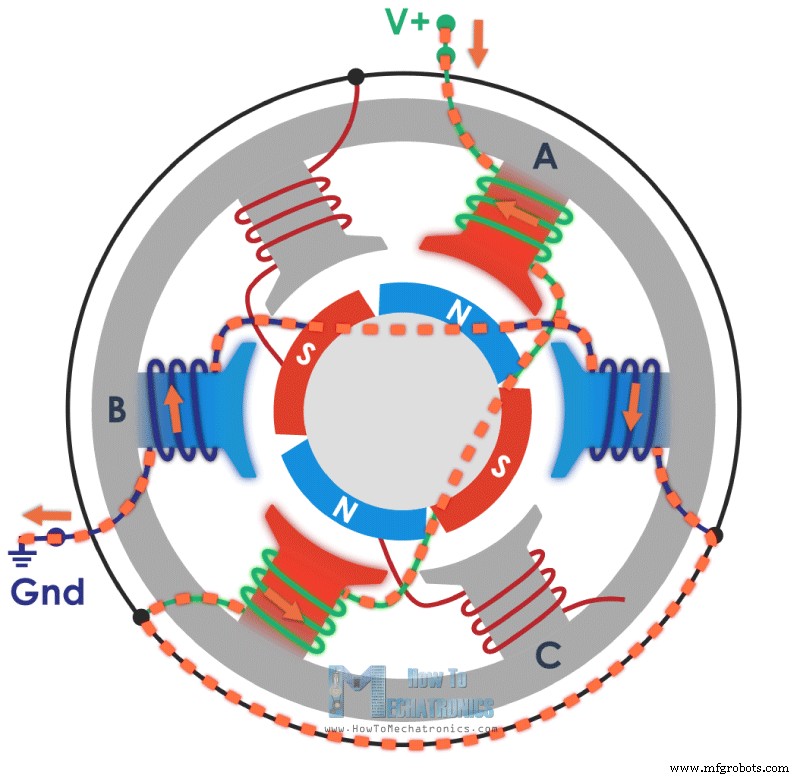
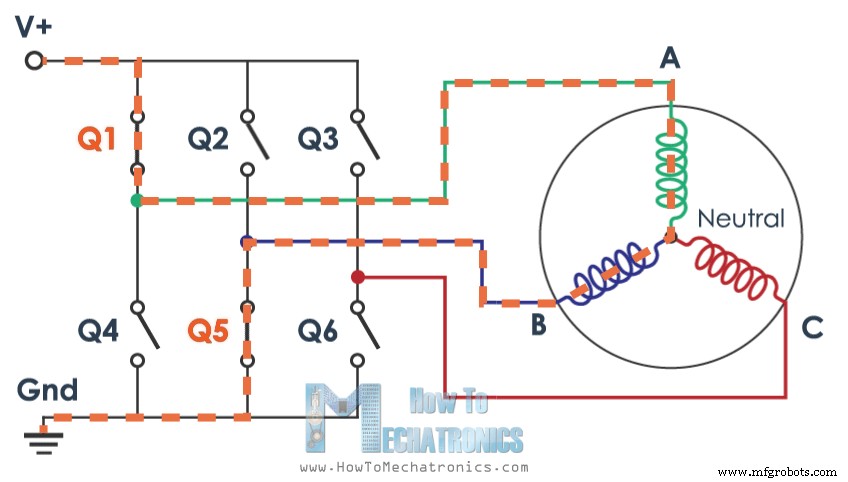
Hier ist ein Beispiel. Wenn wir Phase A hochziehen oder mit einer Art Schalter, z. B. einem MOSFET, an die positive Gleichspannung anschließen und auf der anderen Seite Phase B mit Masse verbinden, fließt der Strom von VCC durch Phase A, der Neutralpunkt und Phase B, an Masse. Mit nur einem Stromfluss haben wir also die vier unterschiedlichen Pole erzeugt, die den Rotor in Bewegung setzen.
Bei dieser Konfiguration haben wir tatsächlich eine Sternschaltung der Motorphasen, bei der der Neutralpunkt intern verbunden ist und die anderen drei Enden der Phasen aus dem Motor herauskommen, und deshalb haben bürstenlose Motoren drei Drähte, die aus ihm herauskommen.
Damit der Rotor den vollen Zyklus durchläuft, müssen wir also nur die richtigen zwei MOSFETs in jedem der 6 Intervalle aktivieren, und darum geht es bei ESCs eigentlich.
Ein ESC oder ein elektronischer Geschwindigkeitsregler steuert die Bewegung oder Geschwindigkeit des bürstenlosen Motors, indem er die entsprechenden MOSFETs aktiviert, um das rotierende Magnetfeld zu erzeugen, damit sich der Motor dreht. Je höher die Frequenz bzw. je schneller der ESC die 6 Intervalle durchläuft, desto höher wird die Drehzahl des Motors.
Hier kommt jedoch eine wichtige Frage, und wie wissen wir, wann wir welche Phase aktivieren müssen. Die Antwort ist, dass wir die Position des Rotors kennen müssen und es zwei gängige Methoden gibt, die zur Bestimmung der Rotorposition verwendet werden.
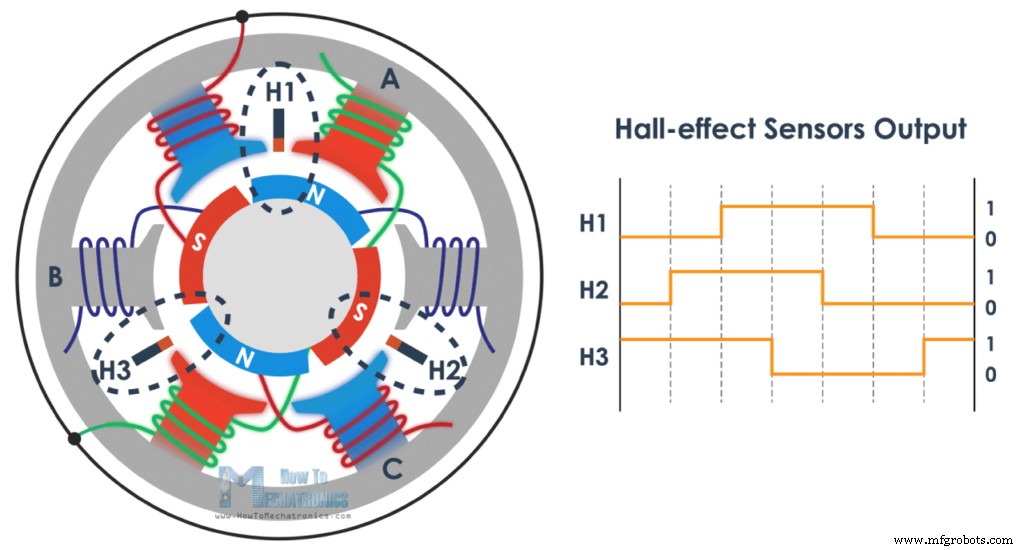
Die erste gängige Methode ist die Verwendung von Hall-Effekt-Sensoren, die in den Stator eingebettet sind und in einem gleichen Winkel von 120 oder 60 Grad zueinander angeordnet sind.
Wenn sich die Permanentmagnete des Rotors drehen, erfassen die Hall-Effekt-Sensoren das Magnetfeld und erzeugen ein logisches „High“ für einen Magnetpol oder ein logisches „Low“ für den entgegengesetzten Pol. Gemäß dieser Information weiß das ESC, wann es die nächste Kommutierungssequenz oder das nächste Intervall aktivieren muss.
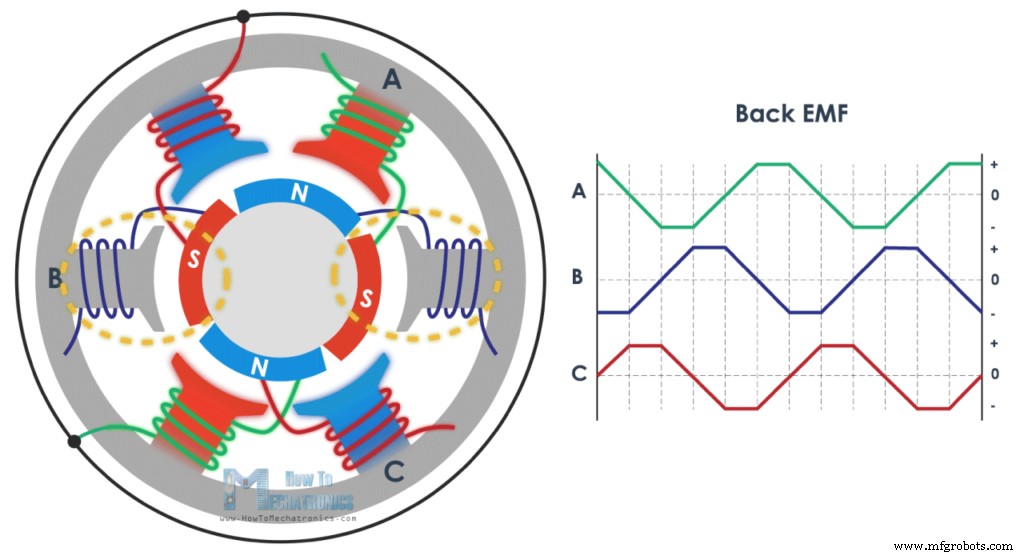
Das zweite übliche Verfahren zur Bestimmung der Rotorposition ist die Erfassung der elektromotorischen Gegenkraft oder Gegen-EMK. Die Gegen-EMK entsteht als Ergebnis des genau entgegengesetzten Prozesses der Erzeugung eines Magnetfelds oder wenn ein sich bewegendes oder sich änderndes Magnetfeld durch eine Spule fließt, induziert es einen Strom in der Spule.
Wenn also das sich bewegende Magnetfeld des Rotors durch die freie Spule oder die nicht aktive Spule fließt, induziert es einen Stromfluss in der Spule und als Ergebnis tritt in dieser Spule ein Spannungsabfall auf. Der ESC erfasst diese Spannungsabfälle, sobald sie auftreten, und basierend darauf sagt er voraus oder berechnet, wann das nächste Intervall stattfinden sollte.
Das ist also das grundlegende Arbeitsprinzip von bürstenlosen Gleichstrommotoren und ESCs und es ist dasselbe, selbst wenn wir die Polzahl sowohl des Rotors als auch des Stators erhöhen. Wir werden immer noch einen Drehstrommotor haben, nur die Anzahl der Intervalle wird zunehmen, um einen vollständigen Zyklus abzuschließen.
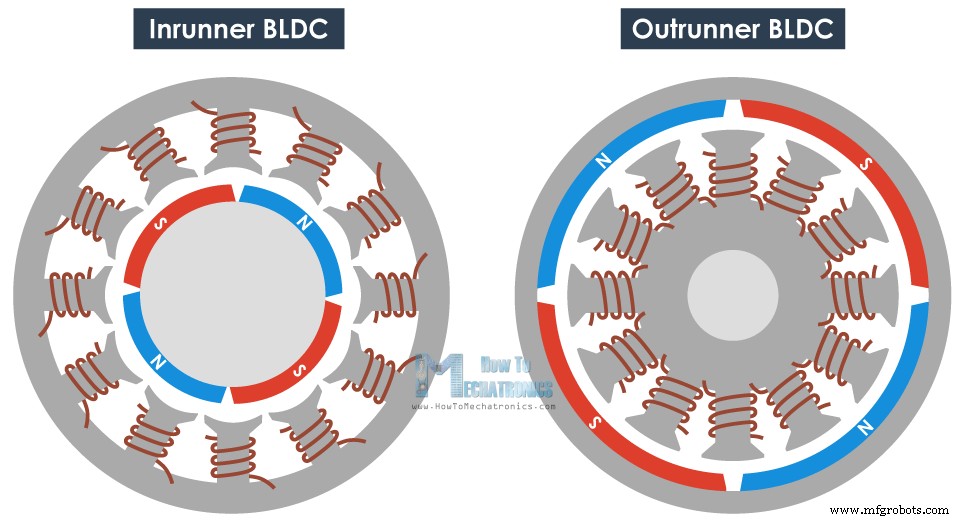
Hier können wir auch erwähnen, dass BLDC-Motoren Innenläufer oder Außenläufer sein können. Bei einem bürstenlosen Innenläufermotor befinden sich die Permanentmagnete innerhalb der Elektromagnete, und umgekehrt, bei einem Außenläufermotor befinden sich die Permanentmagnete außerhalb der Elektromagnete. Auch hier verwenden sie das gleiche Arbeitsprinzip und jeder von ihnen hat seine eigenen Stärken oder Schwächen.
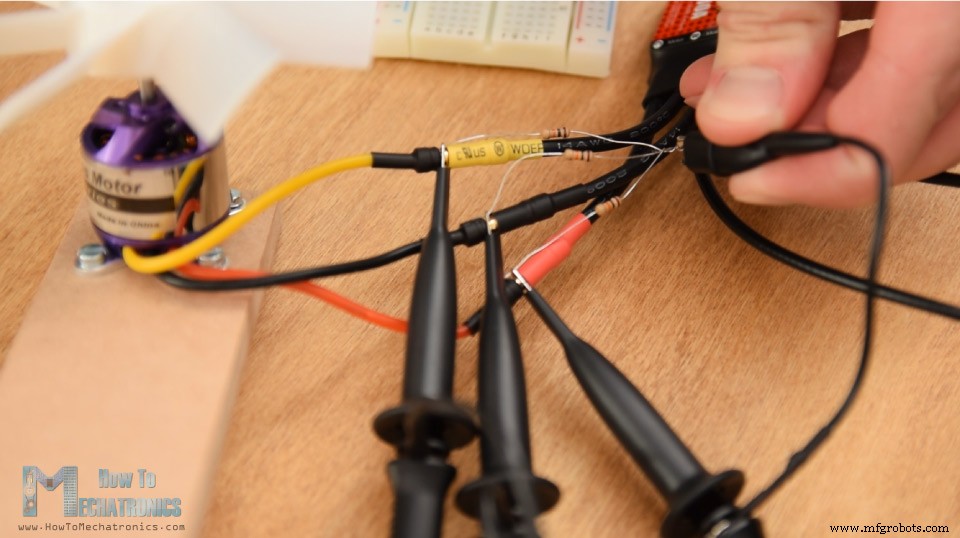
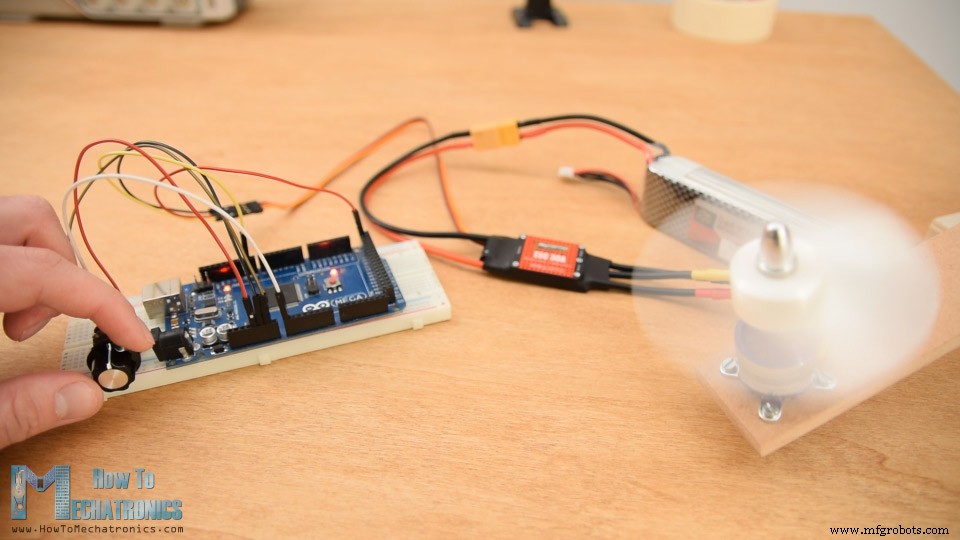
Ok, das ist genug Theorie, also lassen Sie uns jetzt demonstrieren und im wirklichen Leben sehen, was wir oben erklärt haben. Dazu verbinden wir die drei Phasen eines bürstenlosen Motors mit einem Oszilloskop. Ich habe 3 Widerstände an einem einzigen Punkt verbunden, um einen virtuellen Neutralpunkt zu bilden, und auf der anderen Seite habe ich sie mit den drei Phasen des BLDC-Motors verbunden.
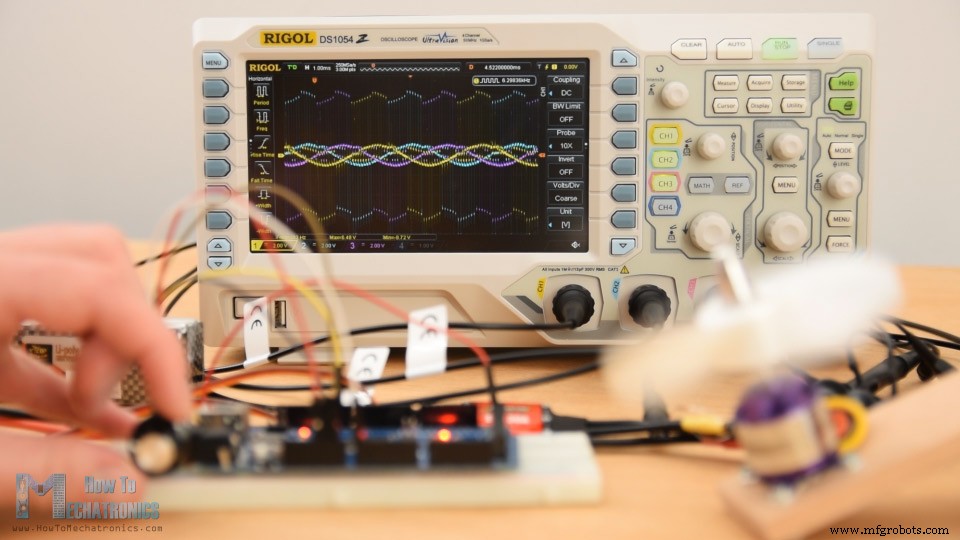
Das erste, was uns hier auffällt, sind die drei Sinuswellen. Diese Sinuswellen sind eigentlich die Back-EFM, die in den Phasen erzeugt werden, in denen sie nicht aktiv sind.
Wir können sehen, dass sich die Frequenz der Sinuswellen und ihre Amplitude ändern, wenn wir die Drehzahl des Motors ändern. Je höher die Drehzahl, desto höher sind die Frequenz und die Amplitude der Gegen-EMK-Sinuswellen. Was den Motor jedoch antreibt, sind eigentlich diese Spitzen, das sind die aktiven Phasen, die das sich ändernde Magnetfeld erzeugen.
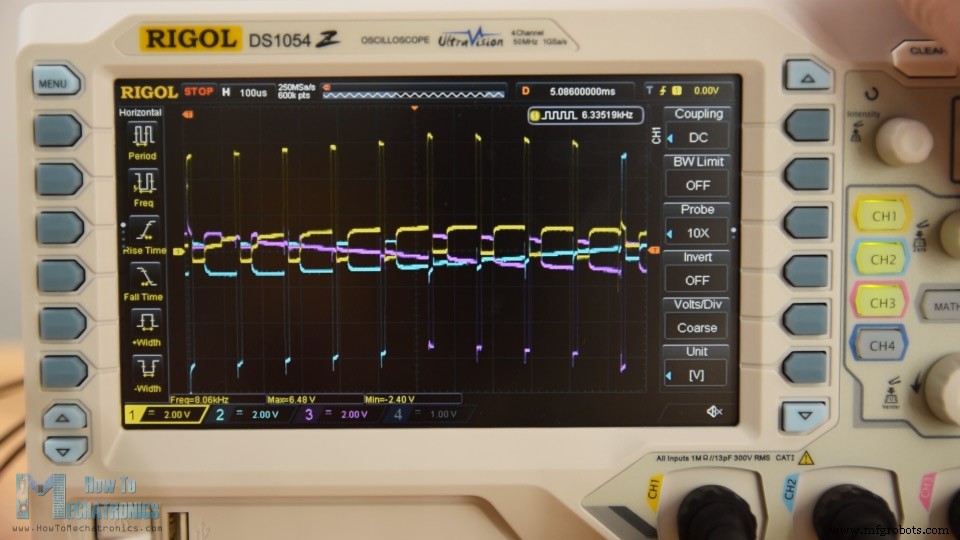
Wir können feststellen, dass es in jedem Intervall zwei aktive und eine inaktive Phase gibt. Hier haben wir zum Beispiel Phase A und B aktiv, während Phase C inaktiv ist. Dann haben wir Phase A und C aktiv, während Phase B inaktiv ist, und so weiter.
Hier möchte ich Banggood.com dafür danken, dass sie mir dieses Oszilloskop zur Verfügung gestellt haben. Es ist das Rigol DS1054Z und es ist eines der besten Einsteiger-Oszilloskope für seinen Preis. Es hat vier Eingangskanäle, eine Bandbreite von 50 MHz, die auf 100 MHz gehackt werden kann, eine Abtastrate von 1 GSa/s und eine relativ große Speichertiefe von 24 Mpts.
Das Display ist 7 Zoll und es ist wirklich schön und hell. Es verfügt über verschiedene mathematische Funktionen, Tiefpass- und Hochpassfilter, SPI- und I2C-Decodierung und vieles mehr. Nochmals vielen Dank an Banggood.com und stellen Sie sicher, dass Sie sich dieses Oszilloskop in ihrem Geschäft ansehen.
Nichtsdestotrotz ist dies das grundlegende Arbeitsprinzip des bürstenlosen Motors. Falls Sie weitere reale Live-Beispiele wünschen und lernen möchten, wie man bürstenlose Motoren mit Arduino steuert, sollten Sie sich den zweiten Teil dieses Tutorials ansehen.
Ich hoffe, Ihnen hat dieses Tutorial gefallen und Sie haben etwas Neues gelernt. Fühlen Sie sich frei, Fragen im Kommentarbereich unten zu stellen, und vergessen Sie nicht, meine Sammlung von Arduino-Projekten zu überprüfen.Wie es funktioniert
Wie funktioniert ein ESC (elektronischer Geschwindigkeitsregler)

Industrietechnik
- Eine Einführung in Nockenschlösser und wie sie funktionieren
- Eine Einführung in Augenschrauben und ihre Funktionsweise
- Eine Einführung in Ösen und ihre Funktionsweise
- Was ist Spritzpressen und wie funktioniert es?
- Was ist eine Übertragung und wie funktioniert sie?
- Wie funktioniert ein gebürsteter Gleichstrommotor
- Was ist 3D-Druck? – Typen und wie funktioniert er?
- Was ist Lichtbogenschweißen? - Typen und wie funktioniert es
- Was ist ein CNC-Bohrwerk und wie funktioniert es?
- Was ist eine Industriekupplung und wie funktioniert sie?