


Drehzahlregelung von Gleichstrommotoren – Spannungs-, Rheostatik- und Flussregelungsmethoden
Methoden zur Drehzahlregelung von Gleichstrommotoren – Spannungs-, Rheostatik- und Flussregelung von Reihen- und Nebenschluss-Gleichstrommotoren
Ein Gleichstrommotor wird verwendet, um die elektrische Gleichstromleistung (DC) basierend auf den von Magnetfeldern erzeugten Kräften in mechanische Leistung umzuwandeln. Die Leistung des Motors ist mechanische Leistung in Bezug auf die Rotation (Geschwindigkeit) der Welle.
Je nach Anwendung müssen wir die Drehzahl des Motors ändern. Die absichtliche Geschwindigkeitsänderung wird daher als Geschwindigkeitsregelung des Motors bezeichnet.
Der Begriff Geschwindigkeitskontrolle unterscheidet sich von der Geschwindigkeitsregelung. Die Drehzahlregelung bedeutet, die Drehzahl der Welle konstant gegen die Laständerung zu halten.
- Verwandter Beitrag:Gleichstrommaschine – Konstruktion, Funktionsweise, Typen und Anwendungen
EMK-Gleichung eines Gleichstrommotors
Die EMF-Gleichung eines Gleichstrommotors ist unten angegeben:
Eb =PΦNZ / 60A
Wo;
- P =Polzahl
- Ф =Fluss pro Pol
- N =Drehzahl des Motors (RPM)
- Z =Anzahl Leiter
- A =Anzahl paralleler Pfade
Sobald der Motor konstruiert ist, können sich die Anzahl der Pole (P), die Anzahl der Leiter (Z) und die Anzahl der parallelen Pfade (A) nicht mehr ändern. Das sind also fixe Mengen.
Eb ∝ ΦN
Eb =kΦN
Wobei k =Proportionalitätskonstante
Für Gleichstrommotoren wird die EMF auch definiert als;
Eb =V – Ia Ra
Wo;
- V =Versorgungsspannung
- Icha =Ankerstrom
- Ra =Ankerwiderstand
Vergleichen Sie nun beide Gleichungen;
kΦN =V – Ia Ra
k =N =V – Ia Ra / kΦ
Aus der obigen Gleichung hängt die Drehzahl des Motors von der Versorgungsspannung (V), dem Fluss (Φ) und dem Ankerwiderstand (Ra) ab ).
Daher kann die Drehzahl eines Gleichstrommotors variiert, verändert und durch Veränderung gesteuert werden;
- Klemmenspannung „V“ (AKA Applied Voltage Control Method ).
- Außenwiderstand mit Ankerwiderstand Ra (AKA Rheostatische Kontrollmethode ).
- Fluss pro Pol Φ (AKA Flux Control Method ).
Hier werden Klemmenspannung und Ankerwiderstand dem Ankerkreis und der Fluss pro Pol dem Feldkreis zugeordnet.
Also werden die Geschwindigkeitsregelungsmethoden eines Gleichstrommotors wie folgt klassifiziert:
- Ankersteuerungsmethode
- Feldkontrollmethode
Nun besprechen wir, wie diese Methoden für DC-Serien-, Shunt- und Verbundmotoren implementiert werden können.
- Verwandter Beitrag: Servomotor – Typen, Konstruktion, Arbeitsweise, Steuerung &Anwendungen
Geschwindigkeitsregelung des Motors der DC-Serie
Die Drehzahlregelung des DC-Serienmotors erfolgt durch die Ankersteuerungs- und Feldsteuerungsmethoden.
Ankerwiderstands-Steuermethode für DC-Reihenmotoren
Bei dieser Methode wird ein variabler Widerstand oder Rheostat in Reihe mit einem Ankerwiderstand geschaltet. Das Schaltbild dieser Methode ist in der folgenden Abbildung dargestellt.
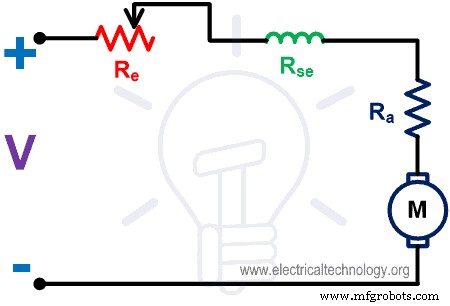
Bild-1
Im Reihenmotor ist die Ankerwicklung in Reihe mit der Feldwicklung geschaltet. Daher sind Ankerstrom und Erregerstrom gleich.
Durch Variieren des Ankerwiderstands variieren Ankerstrom und -spannung. Wenn der Wert des externen Widerstands zunimmt, wird die Spannung über dem Anker und der Strom von der Ankerwicklung reduziert. Und die Geschwindigkeit wird verringert.
Durch diese Methode verringert sich die Drehzahl des Motors nur von dem Drehzahlniveau, wenn kein externer Widerstand angeschlossen ist. Die Geschwindigkeit eines Motors kann von diesem Niveau aus nicht steigen.
Hier ist der Außenwiderstand in Reihe mit dem Anker geschaltet. Daher fließt der volle Laststrom durch den externen Widerstand. Es ist also darauf ausgelegt, den vollen Laststrom kontinuierlich zu führen.
Die Drehzahl-Strom-Kennlinie ist wie in der folgenden Abbildung dargestellt.
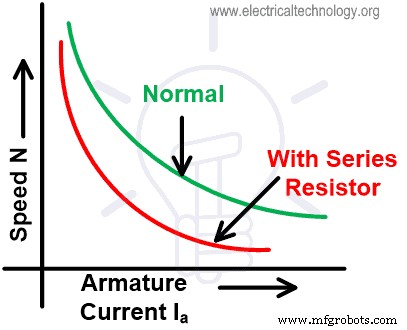
Bild-2
- Verwandter Beitrag: Bürstenloser Gleichstrommotor (BLDC) – Konstruktion, Funktionsprinzip und Anwendungen
Ankerspannungsregelungsverfahren für DC-Reihenmotoren
Bei dieser Methode wird die Drehzahl durch Variation der Ankerspannung (Versorgungsspannung) gesteuert. Bei dieser Methode ist eine separate variable Spannungsquelle erforderlich.
Die Drehzahl eines Motors ist proportional zur Versorgungsspannung. Wenn also die Spannung ansteigt, erhöht sich die Drehzahl des Motors und umgekehrt.
Im Allgemeinen wird diese Methode nicht verwendet. Denn die Kosten für eine variable Stromversorgung sind sehr hoch. Daher wird diese Methode selten zur Geschwindigkeitsregelung verwendet.
Feldsteuerungsmethode für Motoren der DC-Serie
Der Feldstrom ist proportional zum Fluss. Bei diesem Verfahren wird die Geschwindigkeit durch Steuern des Feldstroms gesteuert. Es gibt zwei Möglichkeiten, den Feldstrom zu steuern;
- Feldumleitungssteuerung
- Tapped Filed Control
Abgelegte Umleitungssteuerung
Bei dieser Methode wird die Reihenfeldwicklung parallel zum Ableiter geschaltet. Der Ableiter ist nichts anderes als ein variabler Widerstand. Einige Teile des Feldstroms passieren den Ableiter.
Aus der Drehzahlgleichung eines Motors geht hervor, dass der Fluss umgekehrt proportional zur Drehzahl des Motors ist. Wenn also der Fluss abnimmt, nimmt die Geschwindigkeit zu.
Geringer der Wert des Ableitwiderstands abzüglich des Feldstroms und abzüglich des im Motor erzeugten Flusses. Daher erhöht sich die Drehzahl des Motors.
Bei dieser Methode kann die Geschwindigkeit von der normalen Geschwindigkeit erhöht werden. Das Schaltbild dieser Methode ist in der folgenden Abbildung dargestellt.
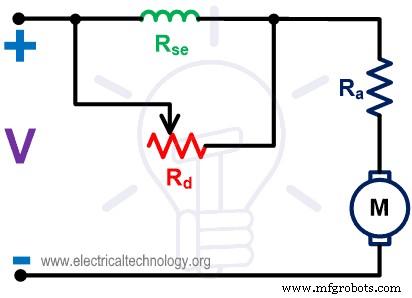
Bild-3
- Verwandter Beitrag: Schrittmotor – Typen, Konstruktion, Betrieb und Anwendungen
Getippte Feldsteuerung
Es gibt Tippen auf die Feldwicklung, um die Anzahl der Windungen in der Wicklung auszuwählen. Durch die Wahl der Anzapfung wird der Feldstrom gesteuert.
Bei einer größeren Anzahl von Umdrehungen ist der Feldstrom höher und die Geschwindigkeit geringer. Bei einer geringeren Anzahl von Umdrehungen ist der Feldstrom geringer und die Geschwindigkeit höher.
Daher kann bei dieser Methode die Geschwindigkeit gesteuert werden, indem das richtige Klopfen an der abgelegten Wicklung gewählt wird.
Dieses Verfahren wird in der elektrischen Traktion zur Geschwindigkeitsregelung des Antriebs verwendet. Das Schaltbild dieser Methode ist in der folgenden Abbildung dargestellt.
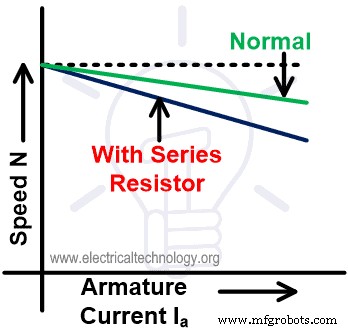
Bild-4
Drehzahlregelung des DC-Nebenschlussmotors
Methoden zur Drehzahlregelung für DC-Nebenschlussmotoren sind ähnlich wie bei Motoren der DC-Serie. Ankersteuerungs- und Feldsteuerungsmethoden, die auch auf den Gleichstrom-Nebenschlussmotor anwendbar sind.
- Verwandter Beitrag:Berechnung der Kabelgröße für LT- und HT-Motoren
Ankerwiderstandsregelungsverfahren für Gleichstrom-Nebenschlussmotor
Bei dieser Methode wird dem Ankerkreis ein externer Widerstand hinzugefügt. Die Feldwicklung ist direkt mit der Versorgung verbunden. Daher bleibt der Feldstrom gleich. Außerdem bleibt der Fluss gleich, wenn der Außenwiderstand variiert.
Aus der Drehzahlgleichung ist der Ankerstrom proportional zur Drehzahl des Motors. Wenn der Wert des externen Widerstands zunimmt, wird der Ankerstrom verringert. Daher wird die Geschwindigkeit verringert.
Diese Methode wird verwendet, um die Geschwindigkeit unter ihren normalen Wert zu steuern. Die Geschwindigkeit kann nicht über die normale Geschwindigkeit ansteigen. Das Anschlussdiagramm dieser Methode ist in der folgenden Abbildung dargestellt.
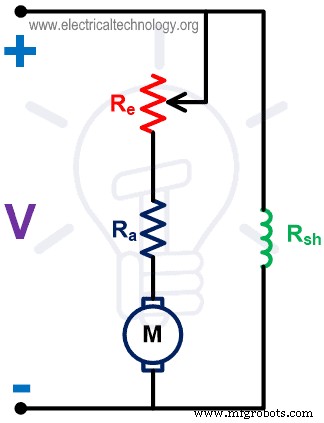
Bild-5
Die Drehzahl-Strom-Kennlinie ist wie in der folgenden Abbildung dargestellt.
Bild-6
- Verwandter Beitrag:Einphasen-Induktionsmotor – Konstruktion, Funktionsweise, Typen und Anwendungen
Feldsteuerungsverfahren für Gleichstrom-Nebenschlussmotor
In einem Gleichstrom-Nebenschlussmotor ist der variable Widerstand in Reihe mit der Feldwicklung des Nebenschlusses geschaltet. Durch diesen variablen Widerstand kann der Feldstrom variiert werden. Dieser variable Widerstand wird auch als Feldregler bezeichnet.
Das Verbindungsdiagramm dieser Methode ist in der folgenden Abbildung dargestellt.
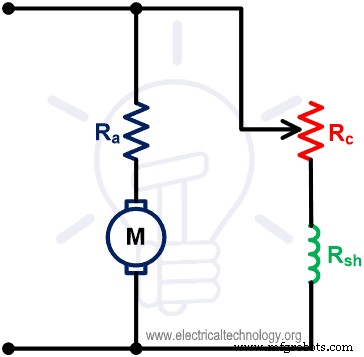
Bild-7
Aus dem obigen Schaltplan ergibt sich die Gleichung des Shunt-Feldstroms:
Durch Erhöhen des Widerstandswerts sinkt der Feldstrom und damit der Fluss. Aus der Geschwindigkeitsgleichung ist der Fluss umgekehrt proportional zur Geschwindigkeit. Die Geschwindigkeit nimmt also zu, wenn der Fluss abnimmt.
Diese Methode ist also anwendbar, um die Geschwindigkeit über der normalen Geschwindigkeit zu steuern. Die Geschwindigkeit kann bei dieser Methode nicht unter die normale Geschwindigkeit reduziert werden. Die Drehzahl-Strom-Charakteristik dieser Methode ist in der folgenden Abbildung dargestellt.
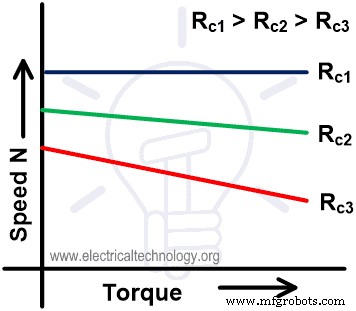
Bild-8
- Verwandter Beitrag: Dreiphasen-Induktionsmotor – Konstruktion, Funktionsweise, Typen und Anwendungen
Ankerspannungsregelungsverfahren für Gleichstrom-Nebenschlussmotor
Bei dieser Methode wird die Feldwicklung durch die Konstantversorgung versorgt. Die Ankerwicklung wird jedoch von einer separaten variablen Gleichstromquelle versorgt.
Diese Methode ist auch als Ward-Leonard-Methode bekannt . Das Anschlussdiagramm dieser Methode ist in der folgenden Abbildung dargestellt. 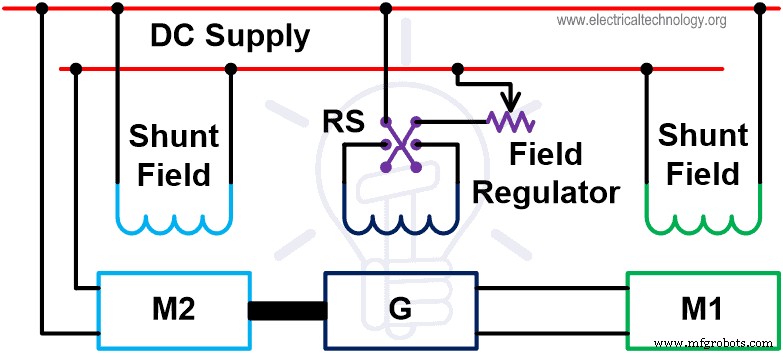
Bild-9
Aus dem obigen Diagramm steuern wir die Geschwindigkeit von Motor M1. Dieser Motor wurde vom Generator G.
angetriebenDie Shunt-Feldwicklung ist mit der DC-Versorgung verbunden. Der Generator G wird durch den Motor M2 angetrieben. Der Motor M2 ist ein Motor mit konstanter Geschwindigkeit und wird von der Gleichstromversorgung versorgt.
Der Motor M1 beginnt sich zu drehen, wenn die Ausgangsspannung des Generators G an den Motor angelegt wird. Die Geschwindigkeit eines Motors kann durch Steuern der Ausgangsspannung des Generators G gesteuert werden.
Der Feldregler ist über den Generator mit einer DC-Versorgungsleitung verbunden, um die Felderregung zu steuern.
Durch Steuerung der Erregungsspannung des Generators wird die Ausgangsspannung des Generators gesteuert. Und diese Spannung steuert die Geschwindigkeit des Motors M1.
Der Schalter RS ist ein Rückwärtsschalter. Dieser Schalter dient zum Umschalten des Felderregungsanschlusses. Aus diesem Grund kehrt sich der Erregerstrom um und erzeugt die entgegengesetzte Spannung.
Also wird diese entgegengesetzte Spannung die Geschwindigkeit von Motor M1 umkehren. Daher kann der Motor durch dieses Verfahren in beiden Richtungen laufen. And speed can be controlled on both sides of the direction of rotation.
- Related Post:What is Motor Efficiency and How to improve it?
Advantages &Disadvantages if Ward Leonard Method
Advantages of Ward Leonard Method
The advantages of this method are summarized below;
- The speed of a motor can be controlled over a wide range.
- The operation of the motor is very smooth.
- The speed regulation of the motor is good.
- A motor can run with uniform acceleration.
- It has an inherent breaking capacity.
- Easy to reverse the direction of rotation and speed can be controlled in both directions.
Disadvantages of Ward Leonard Method
The disadvantages of this method are summarized below;
- It needs two additional machines (motor-generator set) with the same rating of the main motor. Therefore, the overall cost of this arrangement is very high.
- It produces more noise.
- Frequent maintenance required.
- This arrangement needs more space to install.
- Overall efficiency is low if the motor runs with light load conditions for a long period of time.
Application of Ward Leonard Method
This method is used where the motor to be controlled over a wide speed range. The application of the motor is very sensitive to speed, in this condition this method is very useful.
This method is used in the application like; cranes, excavator, elevator, mine hoists, paper machine, steel rolling mills, etc.
Industrietechnik
- Signalkopplung
- Freigabe- und Interlock-Schaltungen
- Motorsteuerkreise
- Qualitätskontrolle ist der erste Schritt zur Zuverlässigkeit des Motors
- Wachstum des Marktes für Niederspannungssteuerung
- Motorkabel für Antriebe mit variabler Drehzahl
- Arten von Qualitätskontrollmethoden, die für Sandgussteile verwendet werden
- Was bestimmt die Drehzahl eines Hydraulikmotors
- Wie steuert man die Drehzahl eines Hydraulikmotors?
- Was bestimmt die Drehzahl eines Hydraulikmotors?