


Arduino Nano:Steuerung von 2 Schrittmotoren mit Joystick
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
| × | 1 | ||||
| × | 2 | ||||
| × | 2 |
Apps und Onlinedienste
 |
| |||
 |
|
Über dieses Projekt
Beim Bauen von Arduino Projekte mit Schrittmotoren , wie zum Beispiel CNC Maschine, Plotter , oder Animierte Kunst , kommt ein Moment, in dem die Stepper manuell gesteuert werden müssen. Analoge Joysticks sind preiswerte und einfache Module zur manuellen Steuerung mit variabler Geschwindigkeit. Sie scheinen eine gute Wahl zu sein, um die Stepper zu kontrollieren . Lösung des Problems mit traditionellem Arduino Code ist jedoch nicht trivial.
In diesem Tutorial zeige ich Ihnen, wie einfach es ist, Arduino Nano zu programmieren mit Visuino zur Steuerung von 2 Schrittmotoren mit Joystick .
Schritt 1:Komponenten
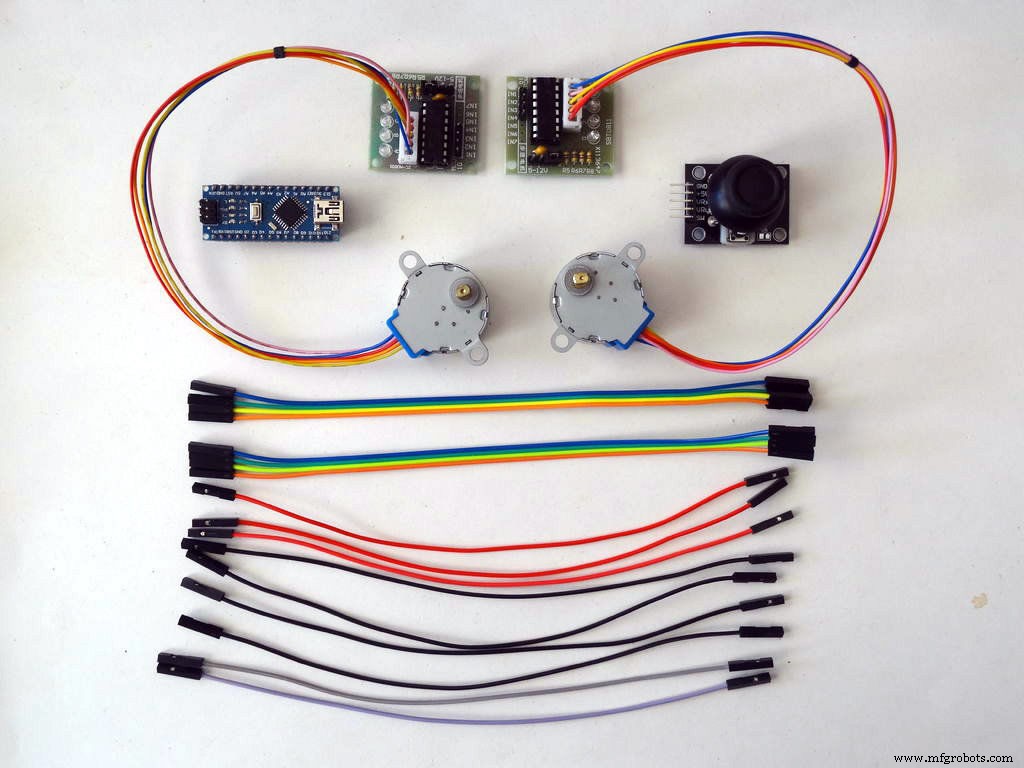
- Ein Arduino kompatibles Board (ich benutze Arduino Nano, weil ich eins habe, aber jedes andere ist gut)
- Ein Joystick die ich von diesem günstigen 37 Sensoren Set bekommen habe
- Zwei 5-V-Schrittmotoren mit Treiberboards (Ich habe einen 28BYJ-48-Stepper mit ULN2003-Treiberplatine verwendet)
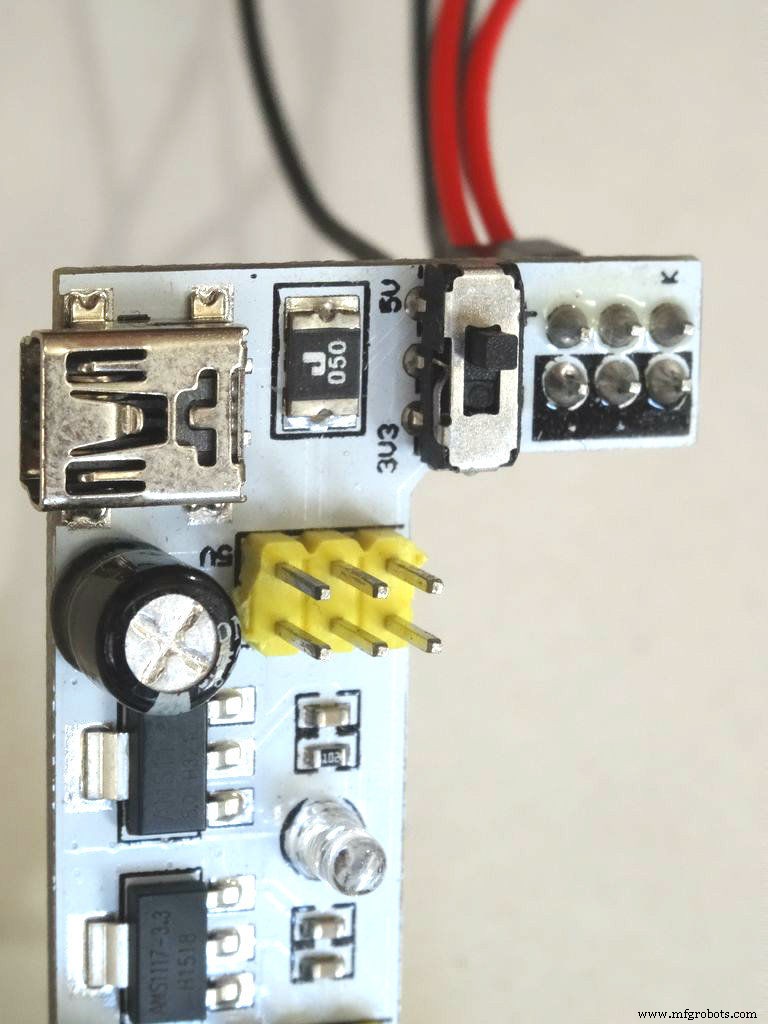
- Ein K2 Breadboard-Netzteil mit Adapter (Bild 2 ) oder eine andere 5-V-Stromquelle für die Stepper
- 17 weiblich-weiblich Überbrückungsdrähte
Schritt 2:Strom anschließen und Schrittmotoren erden
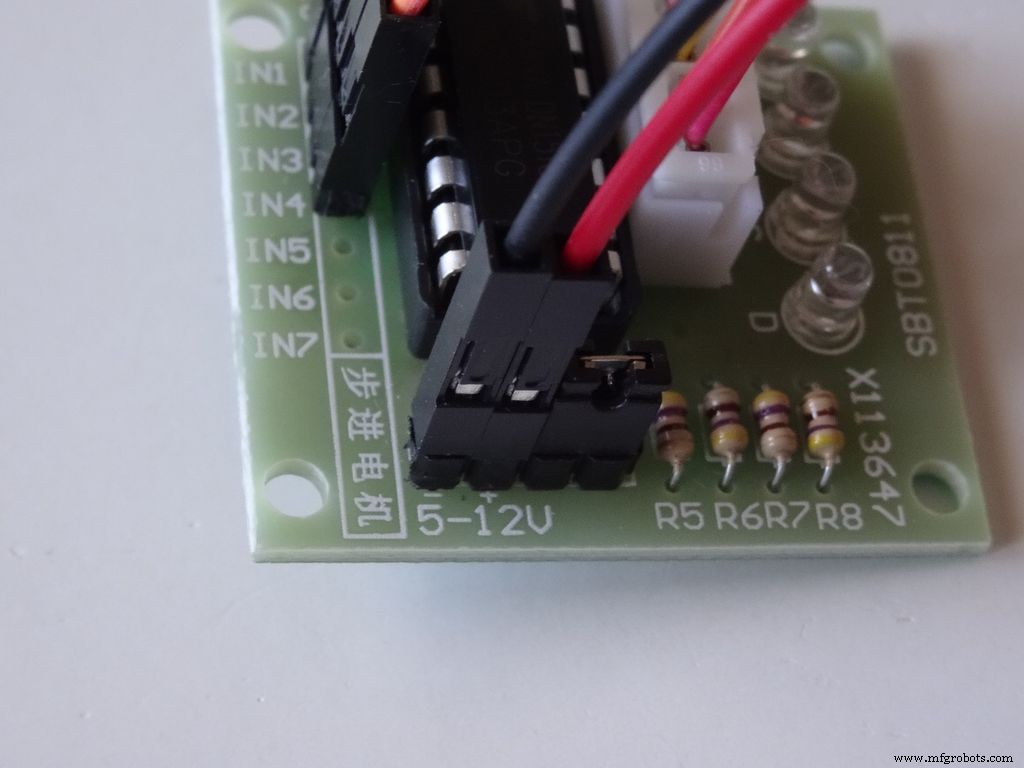

- Verbinden Sie Erde (Schwarzer Draht ) und Power (Roter Draht ), zu jedem der Stepper Driver Module (Bild 1 )
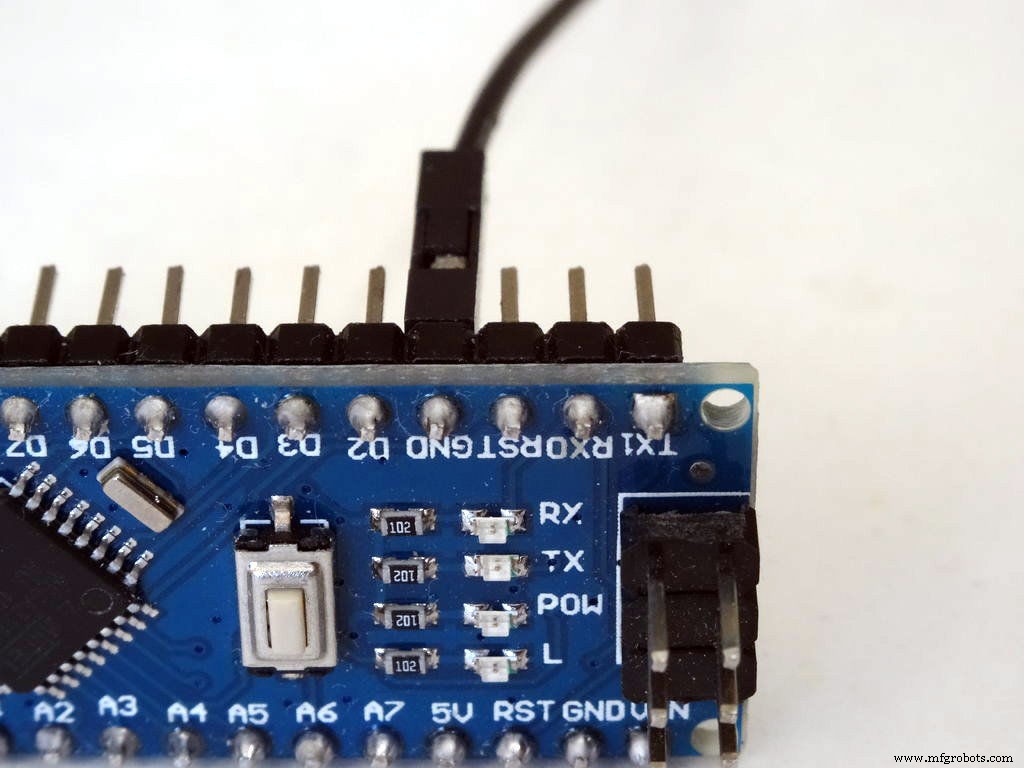
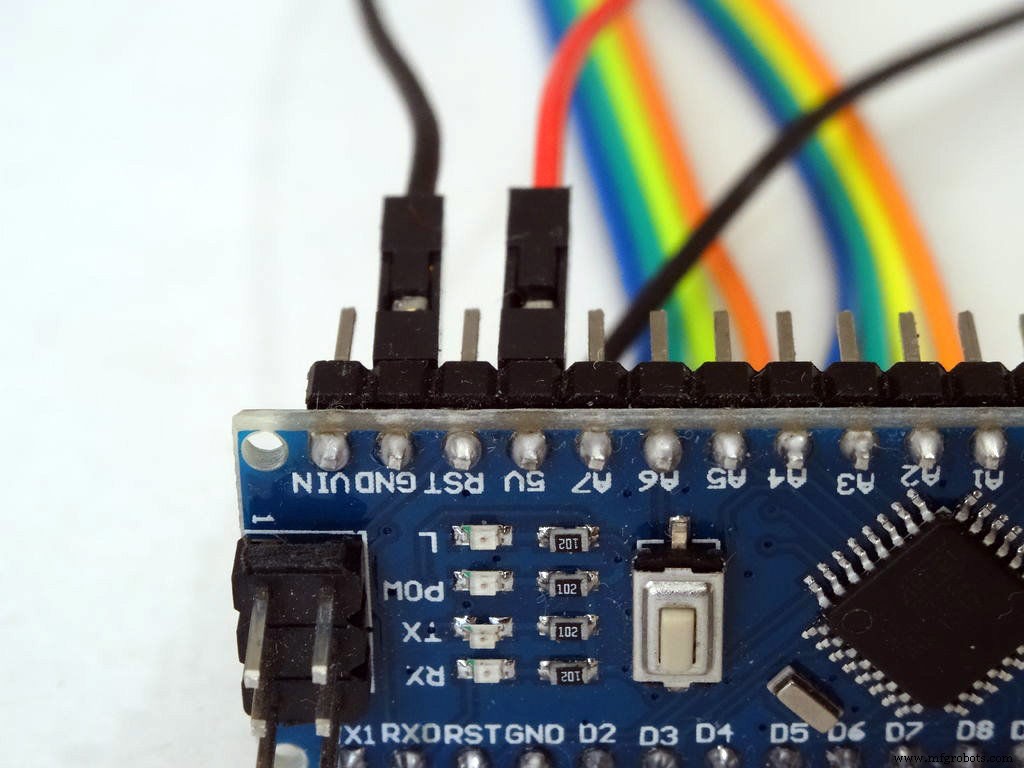
- Verbinde eine andere Erde (Schwarzer Draht ) zum Boden Pin des Arduino Tafel (Bild 2 )
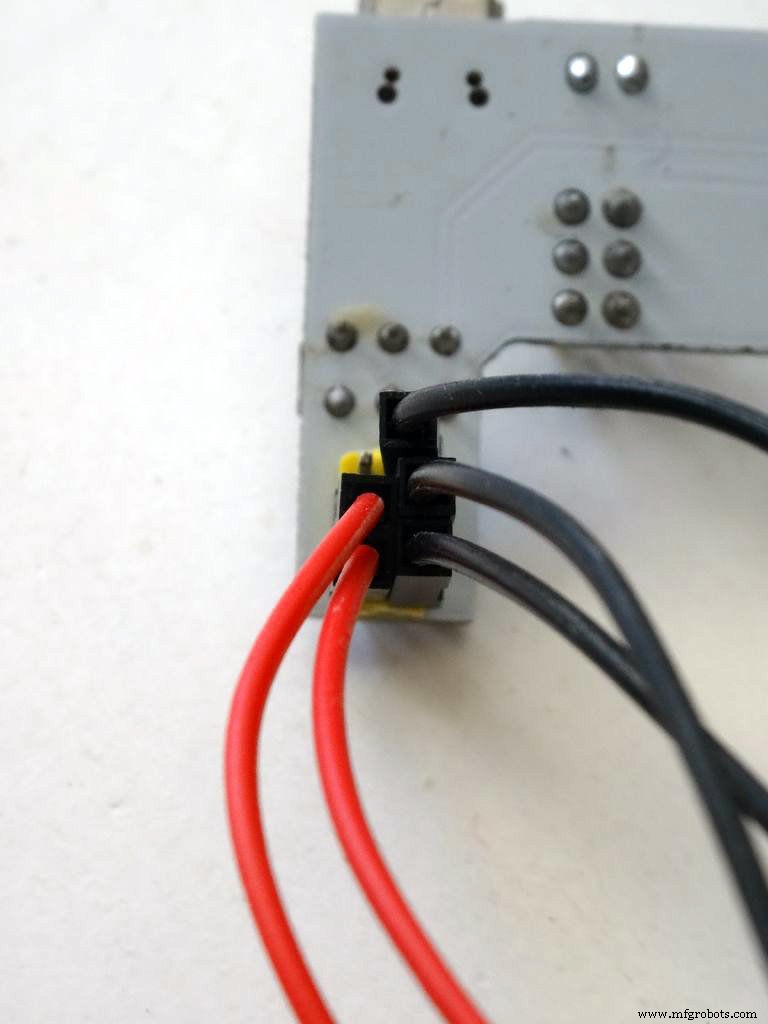
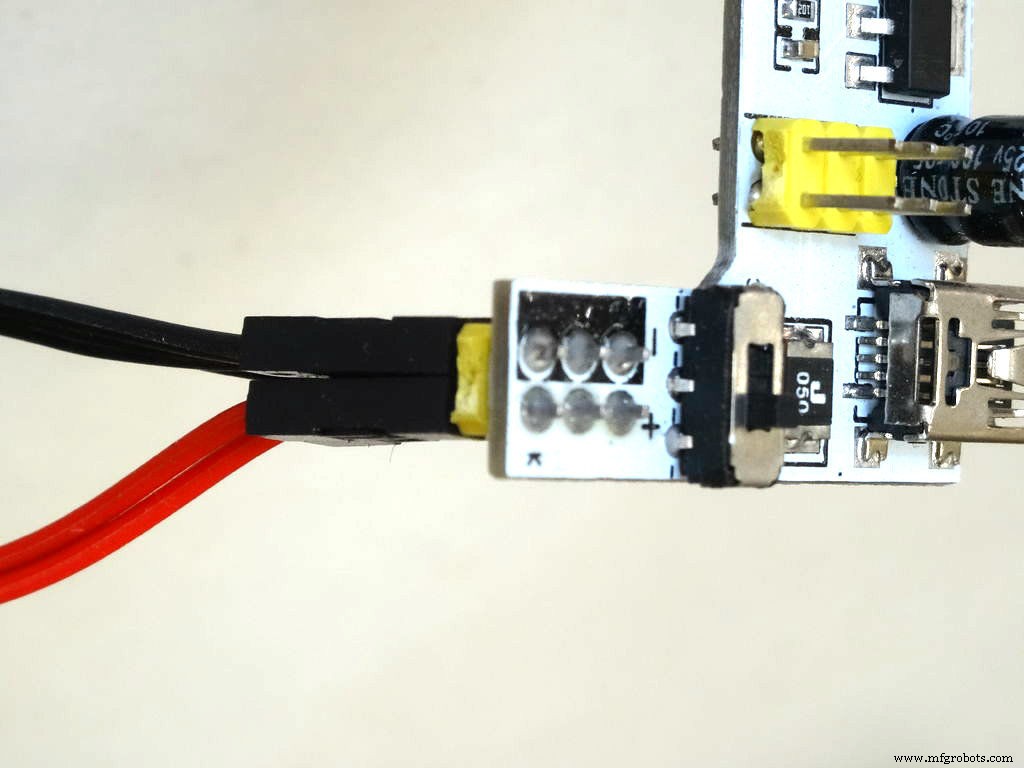
- Verbinde das andere Ende des Stroms (Rote Drähte ) aus den Motortreibermodulen zur "" Macht Pins des K2 Netzteils (Bilder 3 und 4 )
- Verbinde das andere Ende der Erde (Schwarze Drähte ) aus den Motortreibermodulen und dem Arduino zum "- " Boden Pins des K2 Netzteils (Bilder 3 und 4 )
- Stellen Sie sicher, dass der Schalter für die Energieauswahl des K2-Netzteils ist auf 5 V eingestellt (Bild 5 )
- Bild 6 zeigt, wo der Boden ist Pin des Arduino Nano
Schritt 3:Verbinden Sie die Schrittmotoren mit dem Arduino

- Wenn noch nicht geschehen, stecken Sie die Schrittmotorstecker in die Treiberplatinen
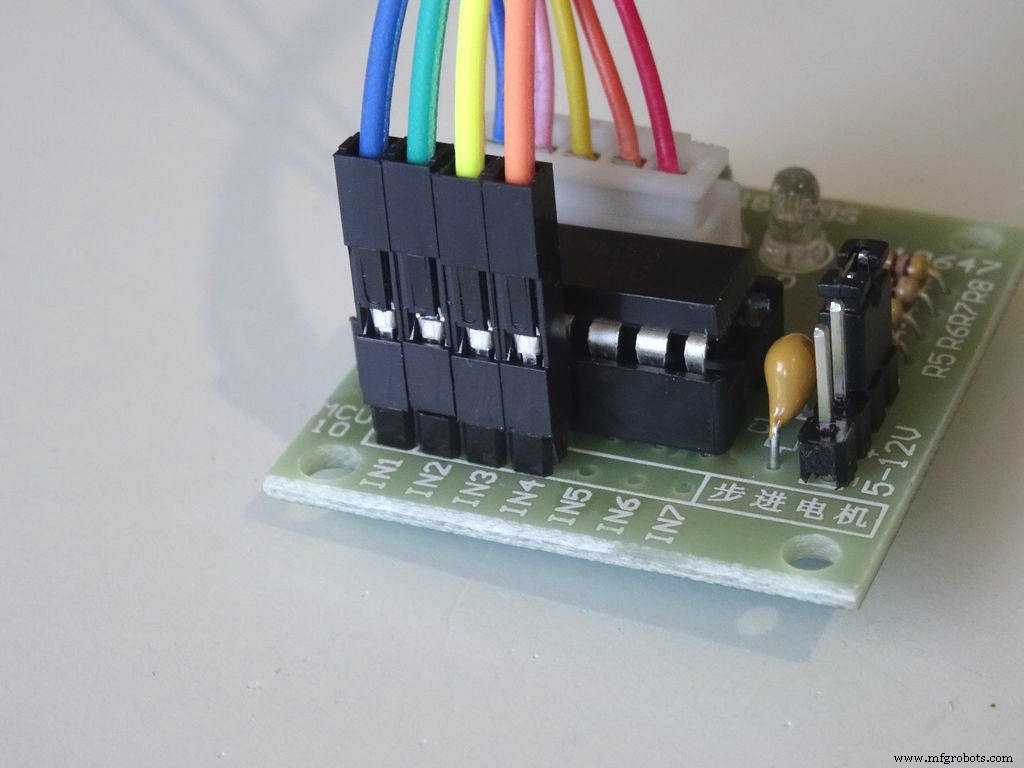
- Verbinden Sie ein Ende der Female-Female-Überbrückungsdrähte (Blaues, Grünes, Gelbes und Oranges Kabel ) an die Pins IN1 bis IN4 des Stepper-Treibers für den ersten Motor (Bild 1 )
- Verbinden Sie ein Ende der Female-Female-Überbrückungsdrähte (Blaues, Grünes, Gelbes und Oranges Kabel ) an die Pins IN1 bis IN4 des Stepper-Treibers für den zweiten Motor (Bild 1 )
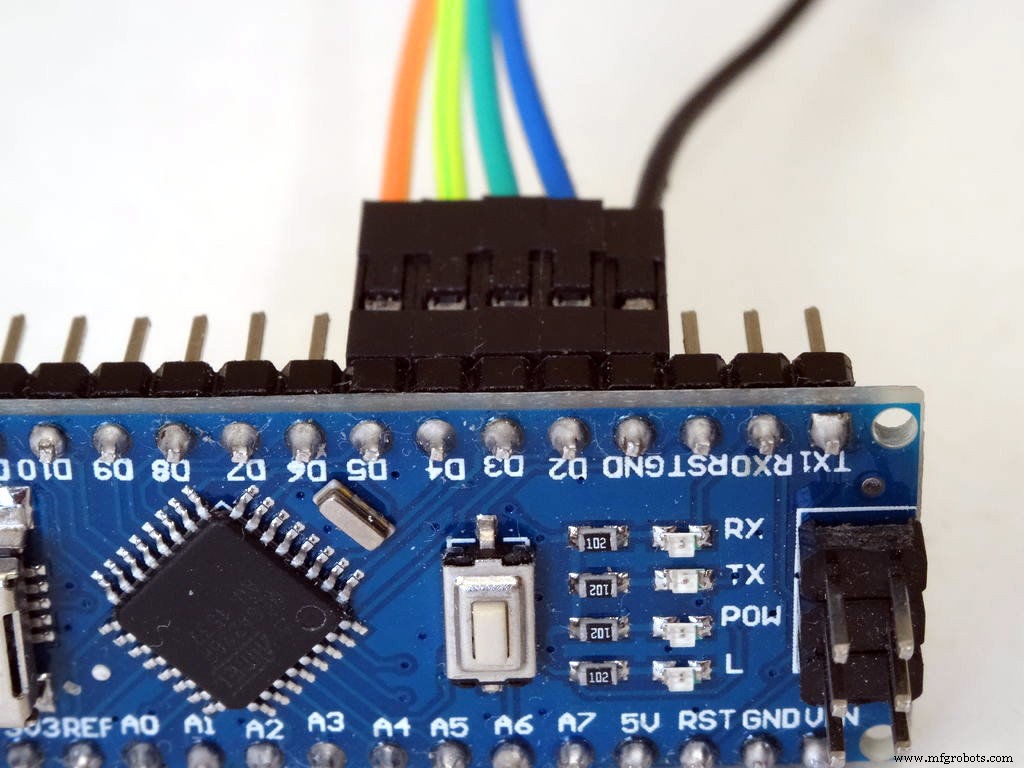
- Schließen Sie das IN1-Kabel an vom ersten Motor (Blaues Kabel ) zum Digitalen Pin 2 des Arduino Tafel (Bild 2 )
- Schließen Sie das IN2-Kabel an vom ersten Motor (Grünes Kabel ) zum Digitalen Pin 3 des Arduino Tafel (Bild 2 )
- Schließen Sie das IN3-Kabel an vom ersten Motor (Gelber Draht ) zum Digitalen Pin 4 des Arduino Tafel (Bild 2 )
- Schließen Sie das IN4-Kabel an vom ersten Motor (Orangefarbener Draht ) zum Digitalen Pin 5 des Arduino Tafel (Bild 2 )
- Schließen Sie das IN1-Kabel an vom zweiten Motor (Blaues Kabel ) zum Digitalen Pin 6 des Arduino Tafel (Bild 3 )
- Schließen Sie das IN2-Kabel an vom zweiten Motor (Grünes Kabel ) zum Digitalen Pin 7 des Arduino Tafel (Bild 3 )
- Schließen Sie das IN3-Kabel an vom zweiten Motor (Gelber Draht ) zum Digitalen Pin 8 des Arduino Tafel (Bild 3 )
- Schließen Sie das IN4-Kabel an vom zweiten Motor (Orangefarbener Draht ) zum Digitalen Pin 9 des Arduino Tafel (Bild 3 )
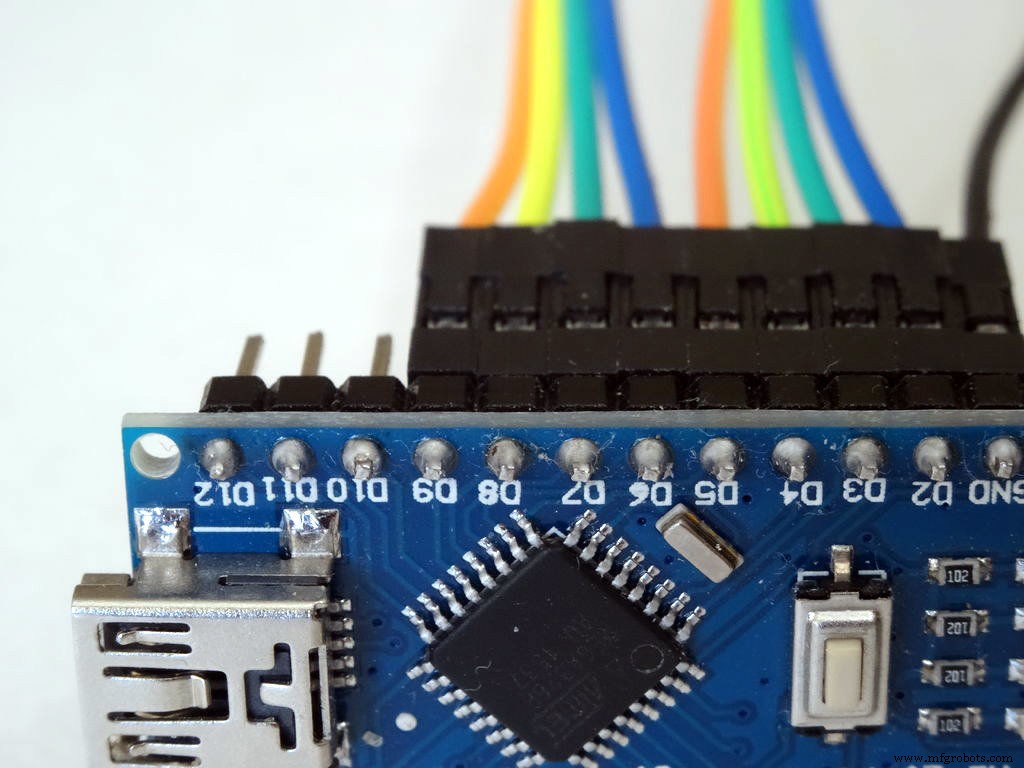
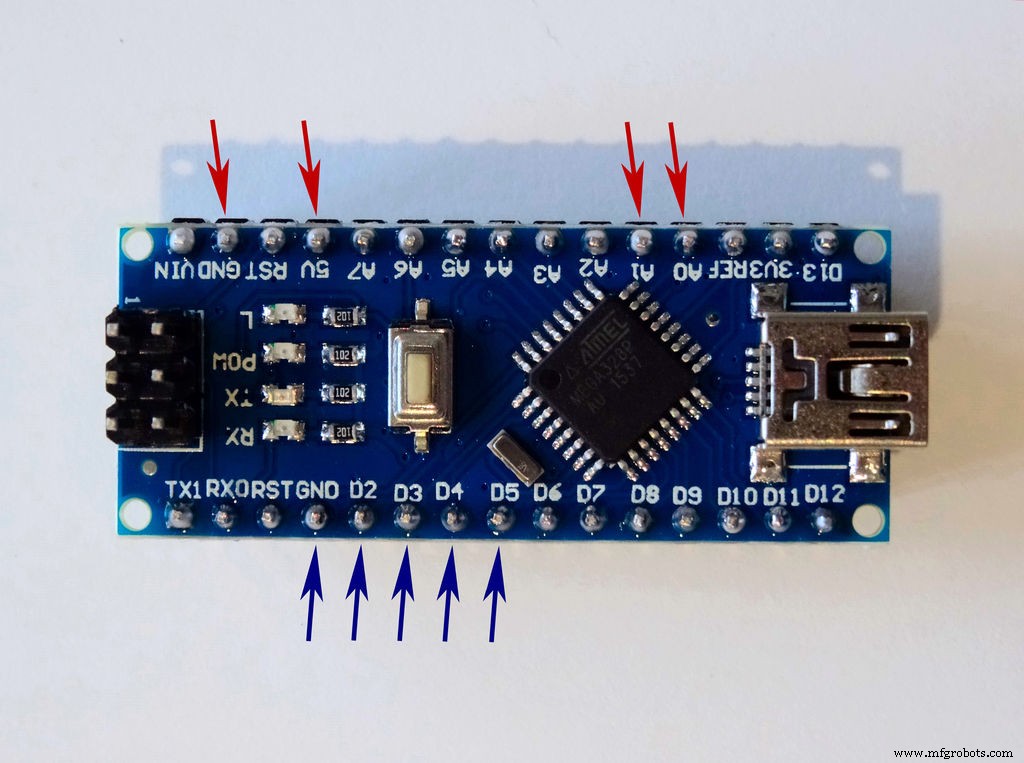
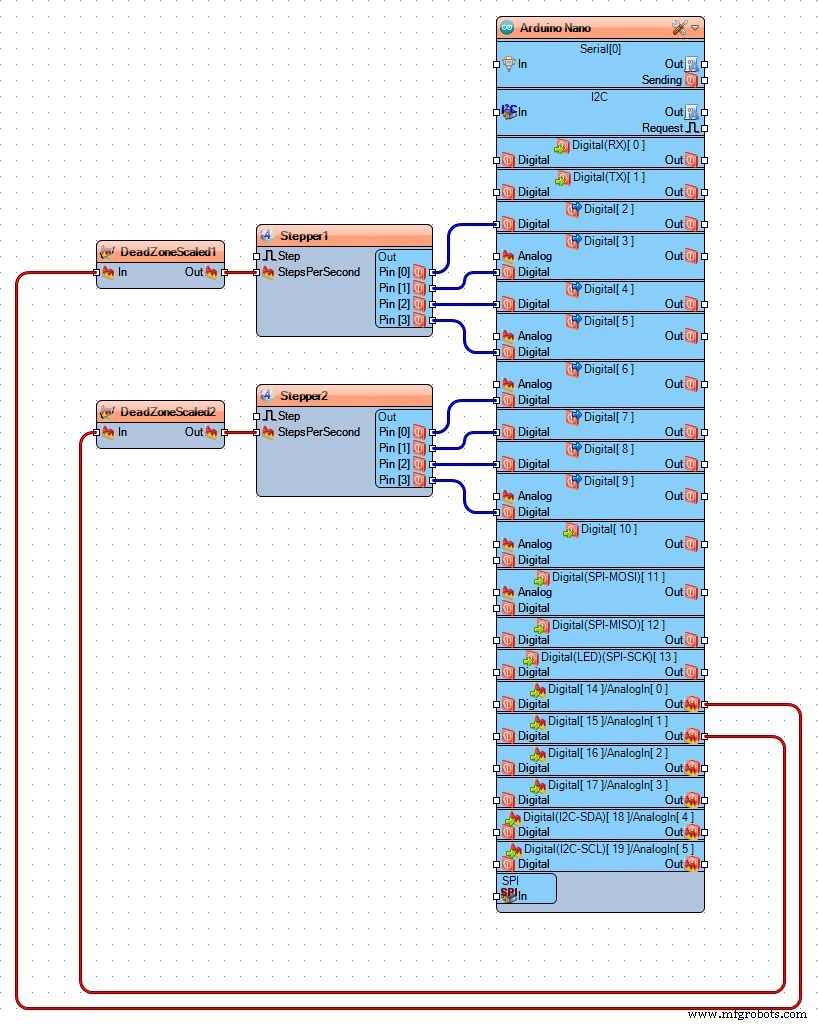
- Bild 4 wird in Rot angezeigt wo sind die Digital 2 bis Digital 9 Pins des Arduino Nano. In Blau wird die im vorherigen Schritt hergestellte Verbindung angezeigt.
Schritt 4:Verbinden Sie den Joystick mit dem Arduino
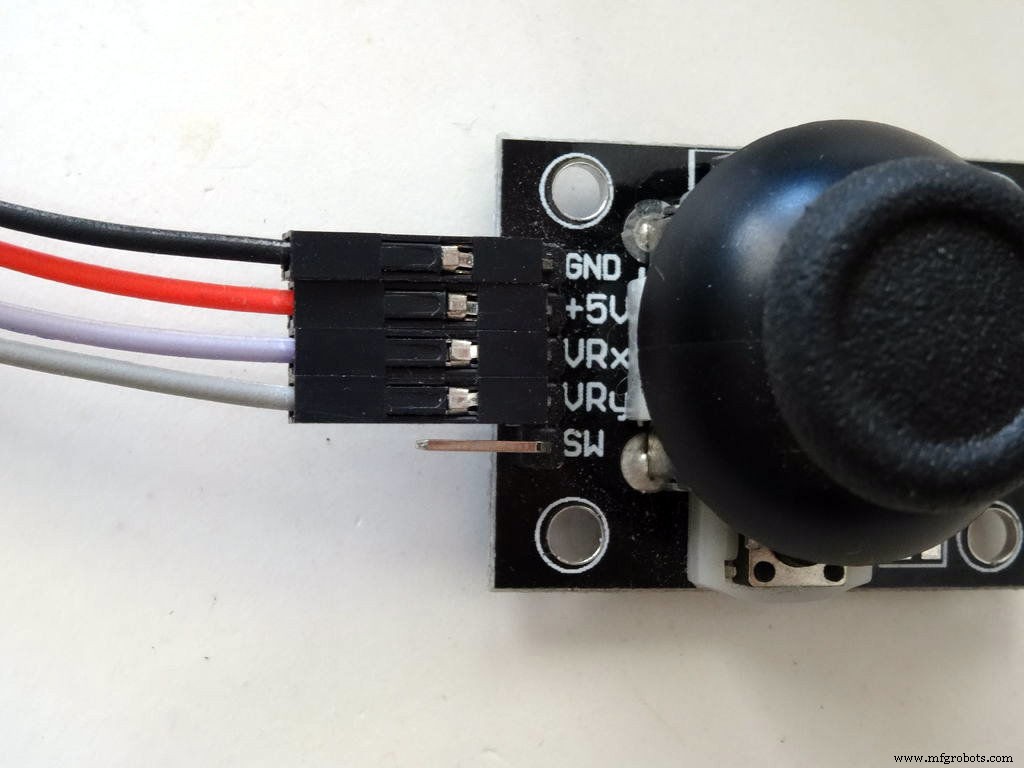
- Verbinde Weiblich-Weiblich Kabel zur Masse (Schwarzer Draht ), Kraft (Roter Draht ), VRx (Lila Draht ) und VRy (Grauer Draht ) des Joysticks wie in Bild 1 gezeigt
- Schließen Sie das Massekabel an (Schwarzer Draht ) auf den Boden Pin des Arduino Tafel (Bild 2 )
- Schließen Sie das Stromkabel an (Roter Draht ) an die 5V Power-Pin des Arduino (Bild 2 )
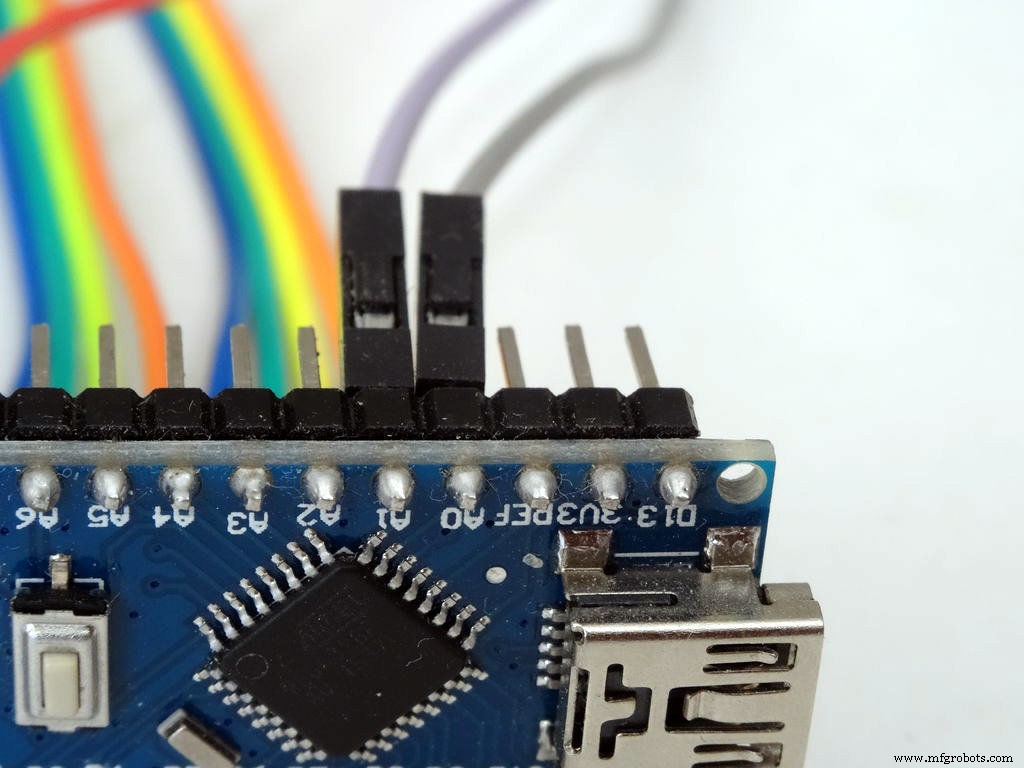
- Schließen Sie das VRx-Kabel an (Brauner Draht ) das Analog 1 Pin des Arduino Tafel (Bild 3 )
- Schließen Sie das VRy-Kabel an (Grauer Draht ) das Analog 0 Pin des Arduino Tafel (Bild 3 )
- Bild 4 wird in Rot angezeigt wo ist der Boden , 5V Leistung, Analog 0 , und Analog 1 Pins des Arduino Nano. In Blau wird die in den vorherigen Schritten hergestellte Verbindung angezeigt.
Schritt 5:Starten Sie Visuino und wählen Sie den Arduino Board-Typ aus
Um mit der Programmierung des Arduino zu beginnen, benötigen Sie die Arduino-IDE installiert von hier:http://www.arduino.cc/ .
Stellen Sie sicher, dass Sie 1.6.7 höher installieren, sonst funktioniert dieses Tutorial nicht!
Der Visuino :https://www.visuino.com muss ebenfalls installiert werden.
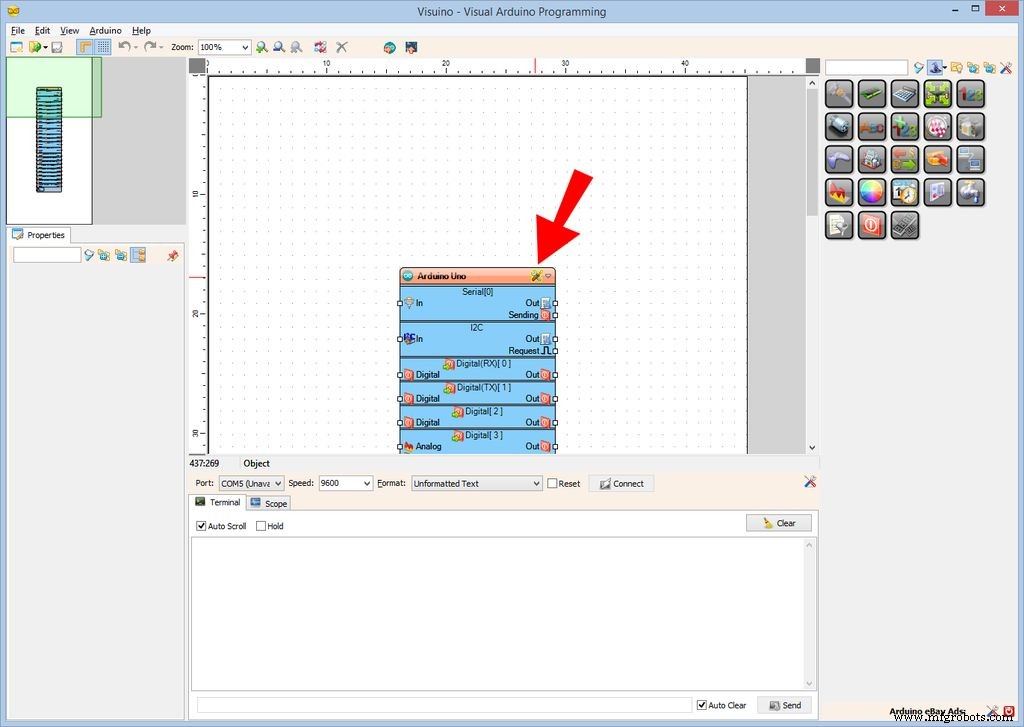
- Starte Visuino wie im ersten Bild gezeigt
- Klicken Sie auf "Tools "-Taste auf der Arduino-Komponente (Bild 1 ) in Visuino
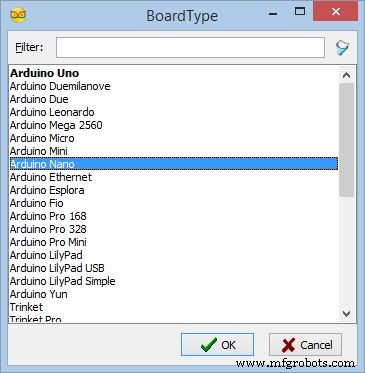
- Wenn das Dialogfeld angezeigt wird, wählen Sie Arduino Nano wie in Bild 2 gezeigt
Schritt 6:In Visuino:Schrittmotorkomponenten hinzufügen und verbinden

Zuerst müssen wir Komponenten hinzufügen, um die Schrittmotoren zu steuern:
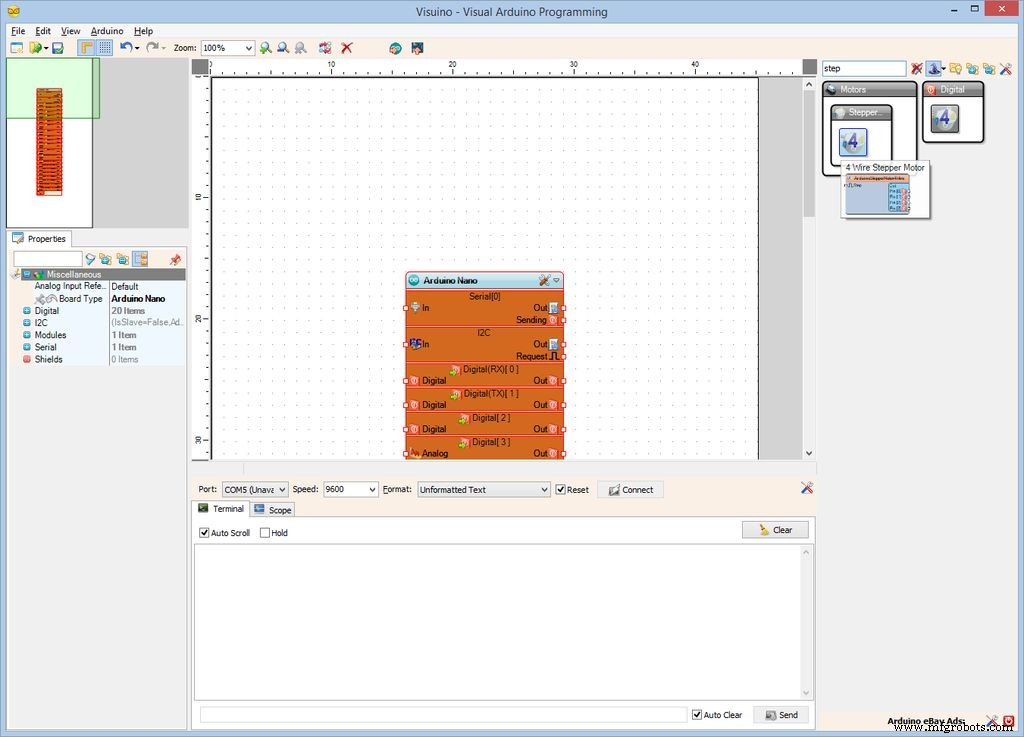
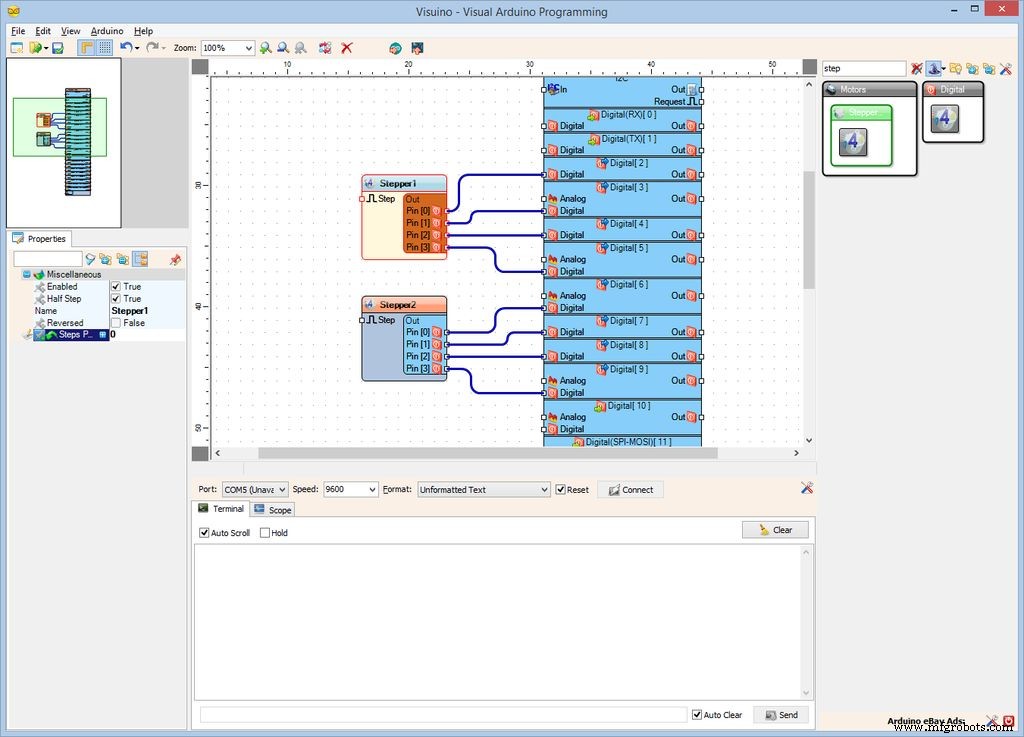
- Geben Sie "Schritt . ein " im Filterfeld der Komponenten-Toolbox und wählen Sie dann den "4-Draht-Schrittmotor " Komponente (Bild 1 ) und lass zwei davon fallen es im Designbereich
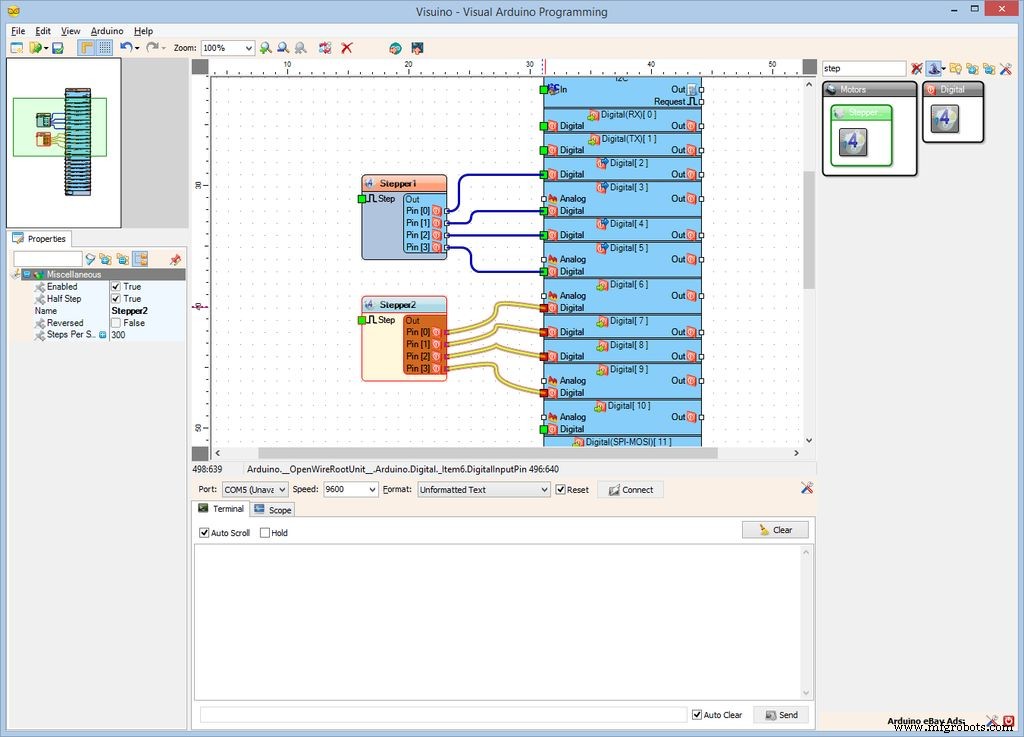
- Klicken Sie in das "Aus " Box enthält die Pins des Stepper1 Komponente, um alle Out-Pins auf einmal zu verbinden (Bild 2 )
- Bewegen Sie die Maus über das "Digital " Eingangspin des "Digital[ 2 ] " Kanal des Arduino Komponente. Der Visuino verteilt die Drähte automatisch, sodass sie korrekt mit den restlichen Pins verbunden sind (Bild 2 )
- Klicken Sie in das "Aus " Box enthält die Pins des Stepper2 Komponente, um alle Out-Pins auf einmal zu verbinden (Bild 3 )
- Bewegen Sie die Maus über das "Digital " Eingangspin des "Digital[ 6 ] " Kanal des Arduino Komponente. Der Visuino breitet die Drähte automatisch aus, sodass sie korrekt mit den restlichen Pins verbunden sind (Bild 3 )
Schritt 7:In Visuino:Legen Sie die Eigenschaften der Schrittmotorkomponente fest und fügen Sie Pins hinzu, um die Geschwindigkeit zu steuern
Da wir die Geschwindigkeit der Stepper steuern möchten, müssen wir der Eigenschaft "Steps Per Second" Pins hinzufügen:
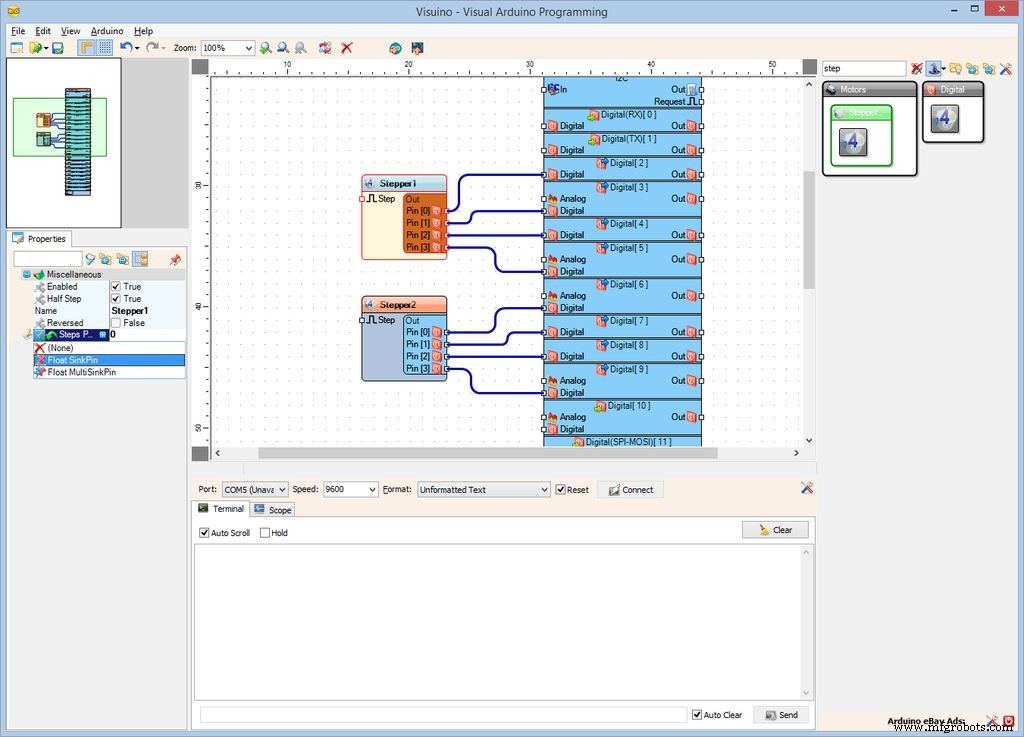
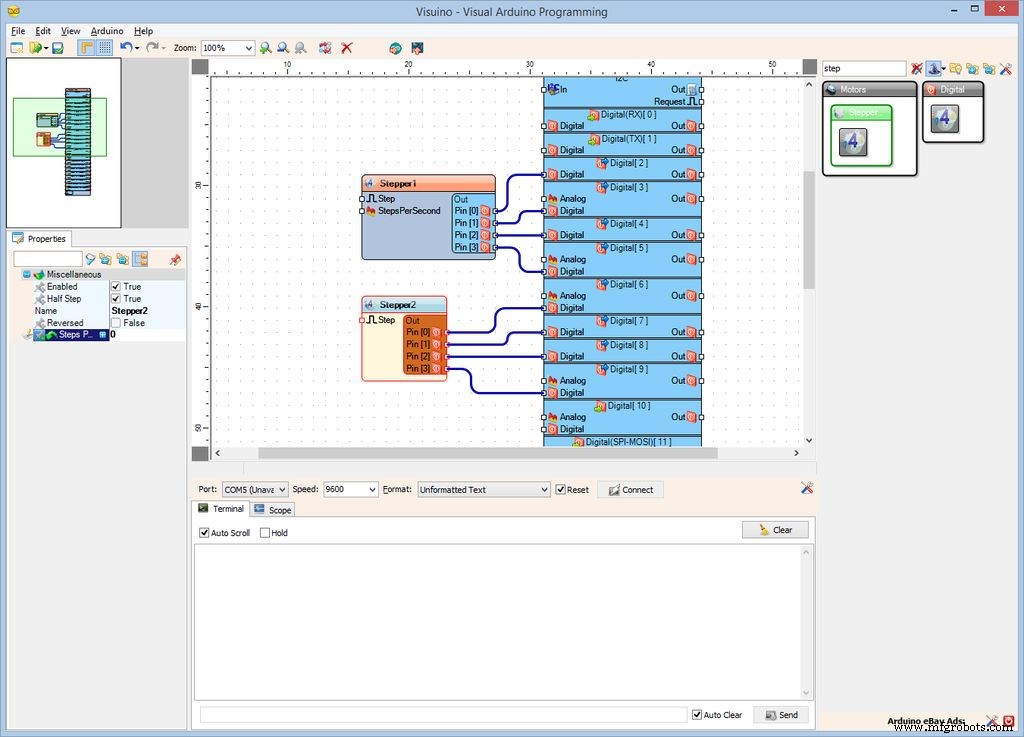
- Wählen Sie den Stepper1 Komponente (Bild 1 )
- Legen Sie im Objektinspektor den Wert für "Schritte pro Sekunde . fest " Eigenschaft zu "0 " (Bild 1 )
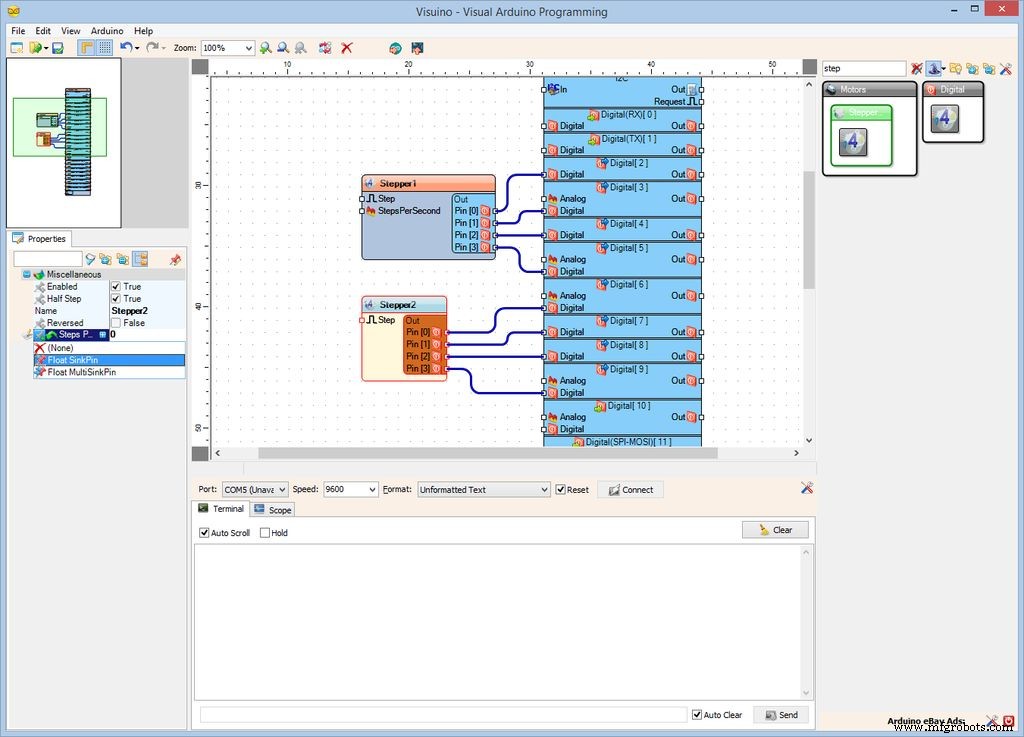
- Klicken Sie im Objektinspektor auf den Pin Schaltfläche vor dem "Schritte pro Sekunde "-Eigenschaft und wählen Sie "Float SinkPin " (Bild 2 )
- Wählen Sie den Stepper2 Komponente (Bild 3 )
- Legen Sie im Objektinspektor den Wert für "Schritte pro Sekunde . fest " Eigenschaft zu "0 " (Bild 3 )
- Klicken Sie im Objektinspektor auf den Pin Schaltfläche vor dem "Schritte pro Sekunde "-Eigenschaft und wählen Sie "Float SinkPin " (Bild 4 )
Schritt 8:In Visuino:Totzonenskalierte analoge Komponenten hinzufügen und verbinden
Die analogen Pins, an denen der Joystick angeschlossen ist, erzeugen normalisierte Werte zwischen 0.0 und 1.0. Wir müssen sie in +/-300 Schritte pro Sekunde umwandeln. Da der Joystick in losgelassener Mittelposition nicht sehr präzise ist, möchten wir, dass eine kleine Zone um die Mitte als 0,5 betrachtet wird, daher müssen wir "Tote Zone" einführen:
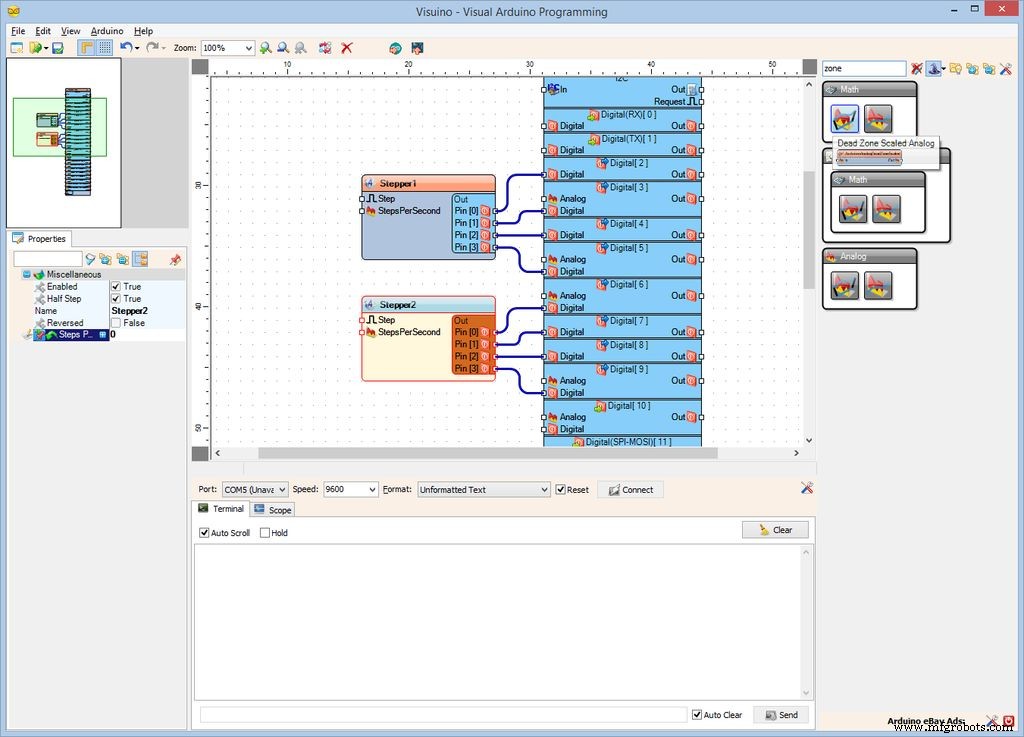
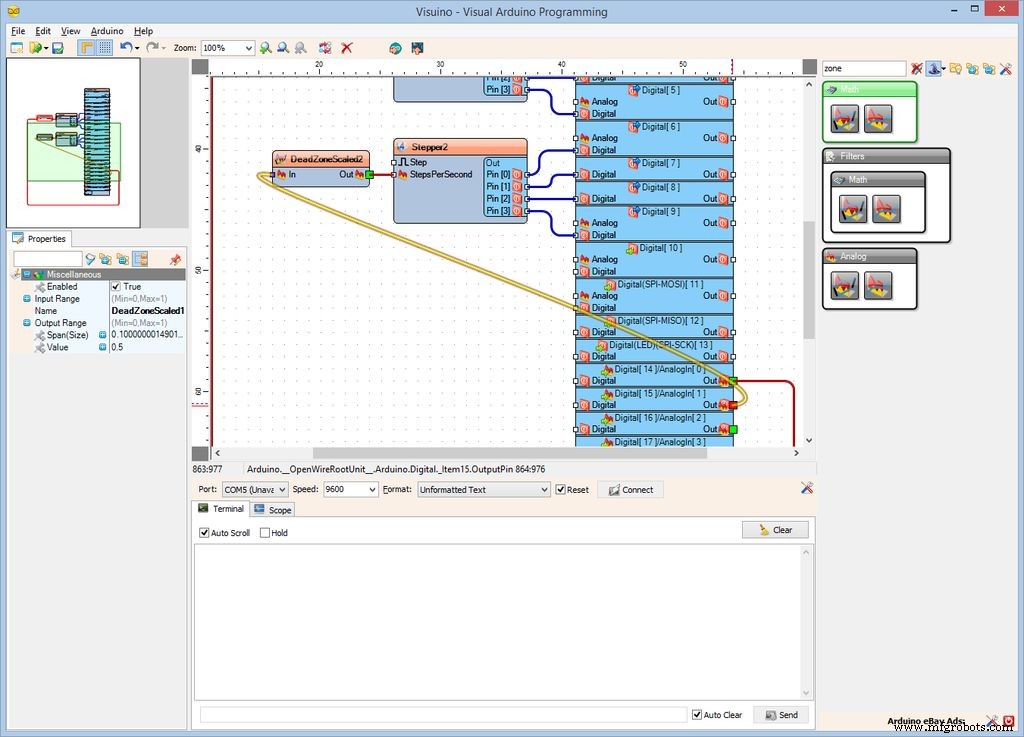
- Geben Sie "Zone . ein " im Feld "Filter" der Komponenten-Toolbox und wählen Sie dann "Totzonenskaliertes Analog . aus " Komponente (Bild 1 ) und lass zwei davon fallen es im Designbereich
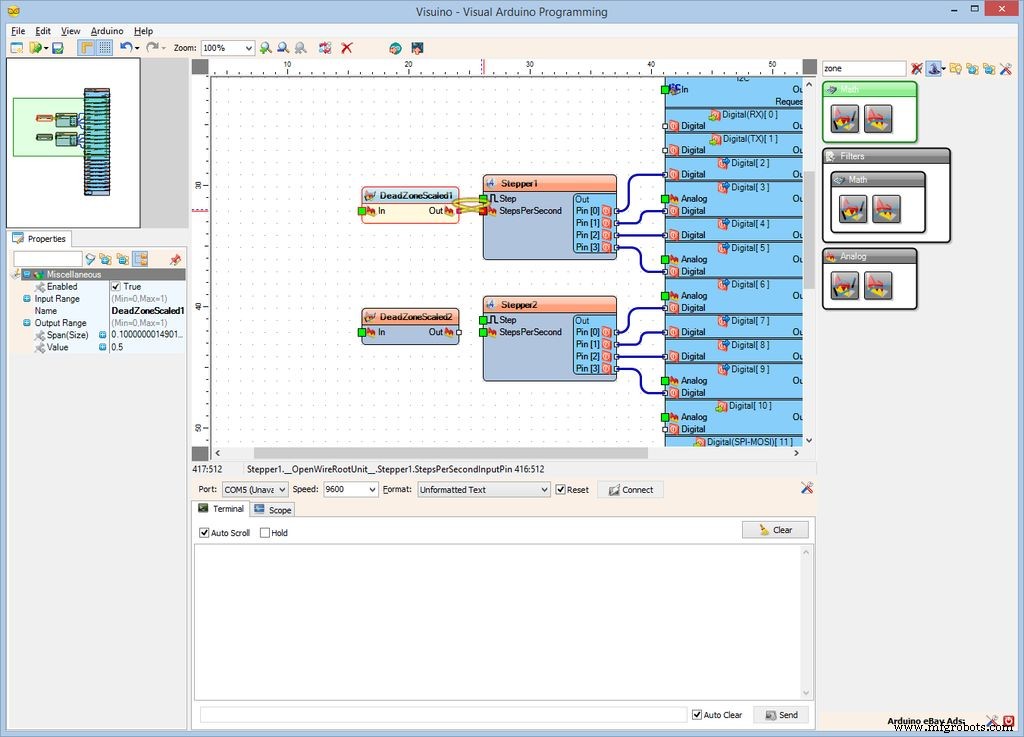
- Verbinden Sie das "Out " Ausgangspin des DeadZoneScaled1 Komponente zu "StepsPerSecond " Eingangspin des Stepper1 Komponente (Bild 2 )
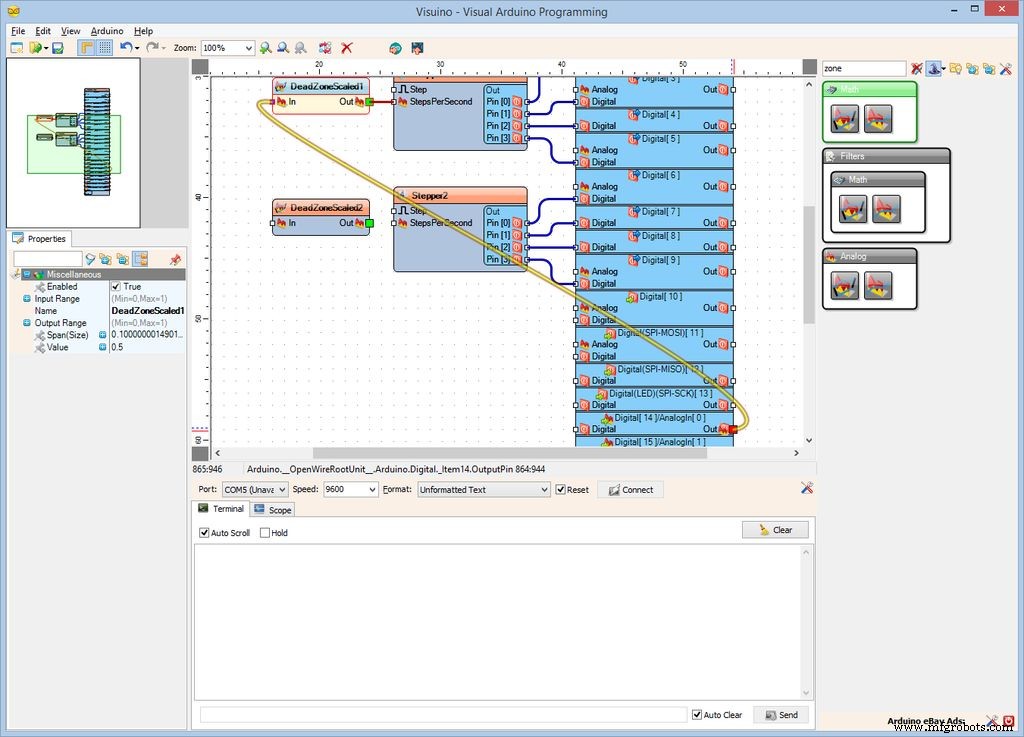
- Verbinden Sie das "Out " Ausgangspin des "Digital[ 14 ]/Analog[ 0 ] " Kanal des Arduino Komponente zum "In " Eingangspin des DeadZoneScaled1 Komponente (Bild 3 )
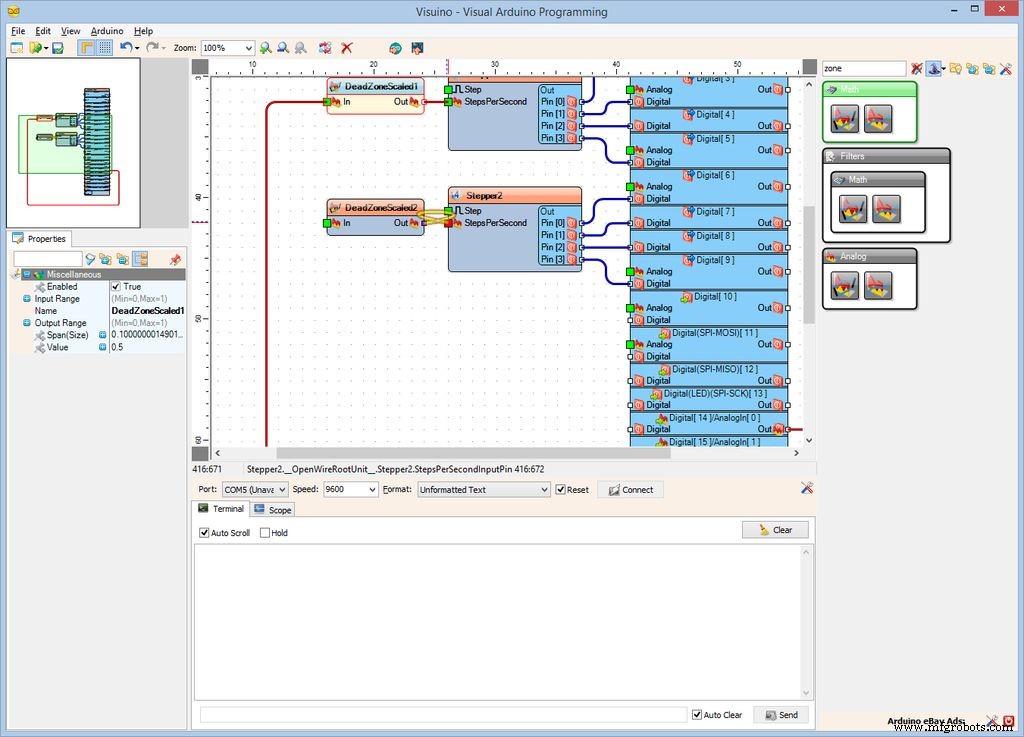
- Verbinden Sie das "Out " Ausgangspin des DeadZoneScaled2 Komponente zu "StepsPerSecond " Eingangspin des Stepper2 Komponente (Bild 4 )
- Verbinden Sie das "Out " Ausgangspin des "Digital[ 15 ]/Analog[ 1 ] " Kanal des Arduino Komponente zum "In " Eingangspin des DeadZoneScaled2 Komponente (Bild 5 )
Schritt 9:In Visuino:Legen Sie die Eigenschaften der analogen Komponenten mit Totzone-Skalierung fest
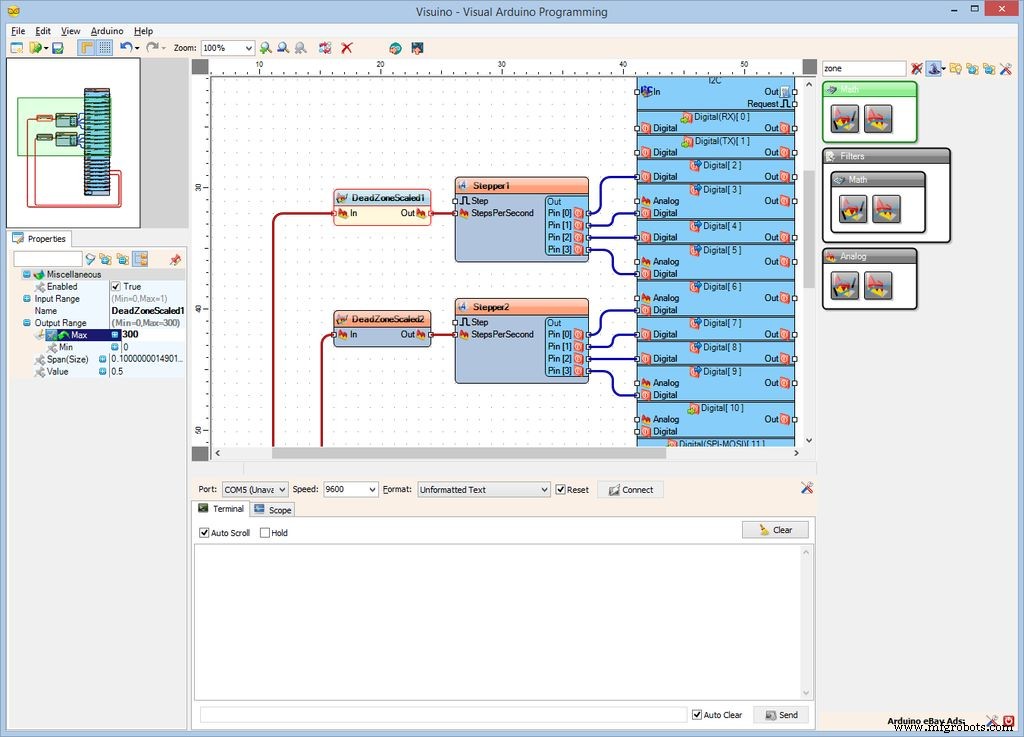
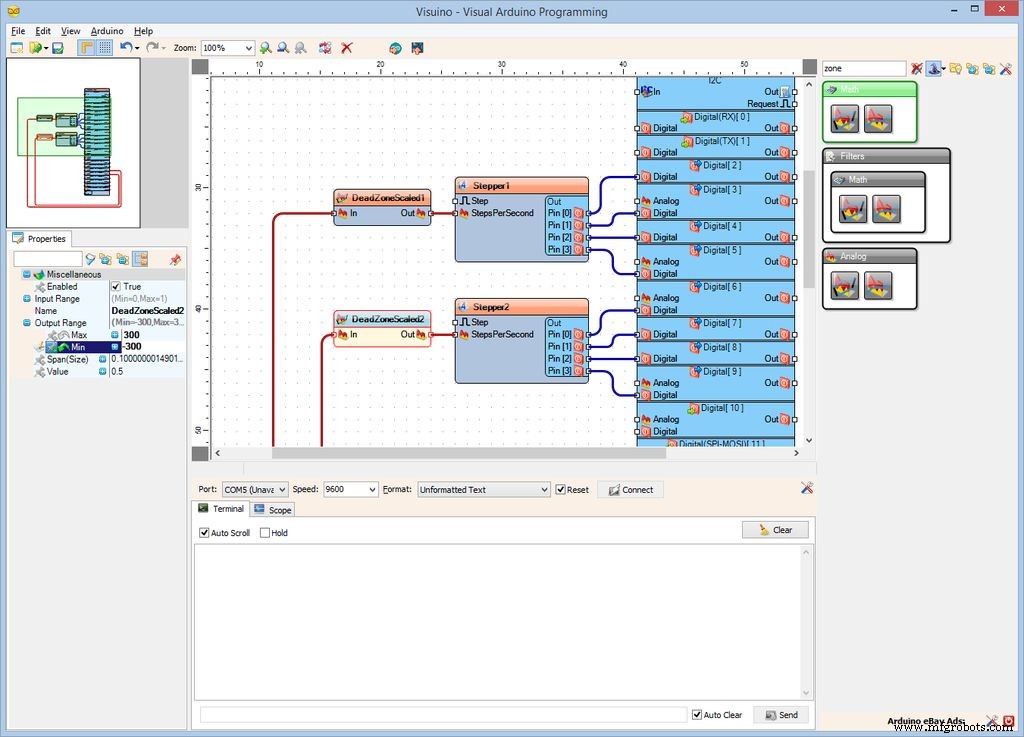
- Wählen Sie im Designbereich DeadZoneScaled1 Komponente (Bild 1 )
- Erweitern Sie im Objektinspektor den "Ausgabebereich " Eigenschaft (Bild 1 )
- Legen Sie im Objektinspektor den Wert von "Max " untergeordnete Eigenschaft von "Ausgabebereich " Eigenschaft auf "300 " (Bild 1 )
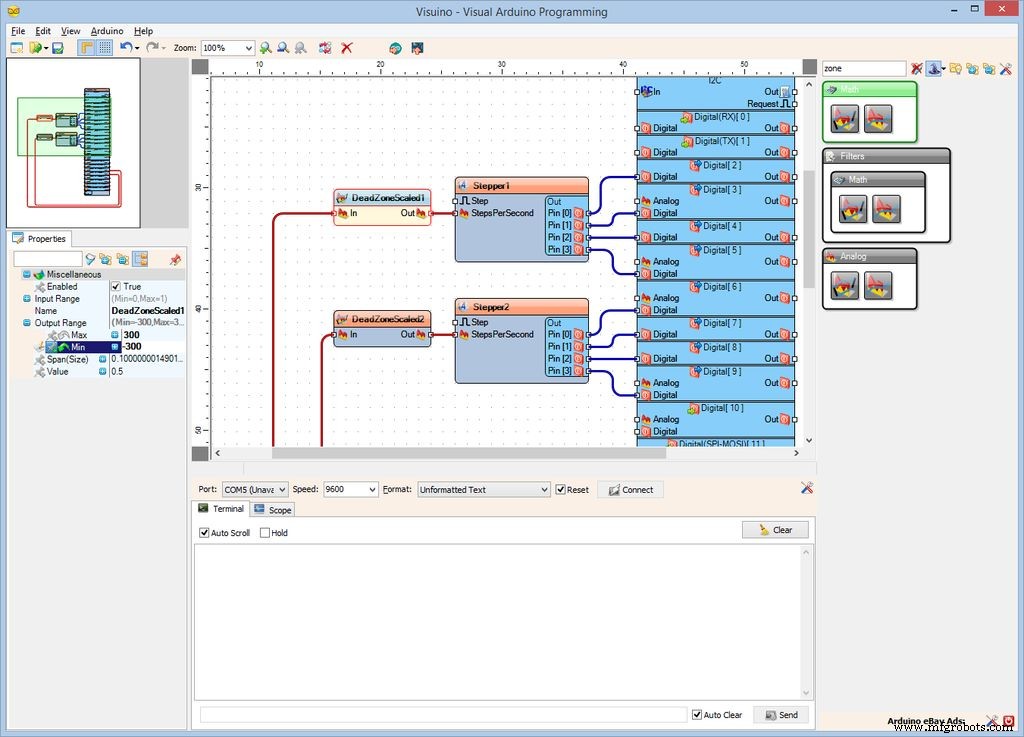
- Legen Sie im Objektinspektor den Wert von "Min " untergeordnete Eigenschaft von "Ausgabebereich " Eigenschaft zu "-300 " (Bild 2 )
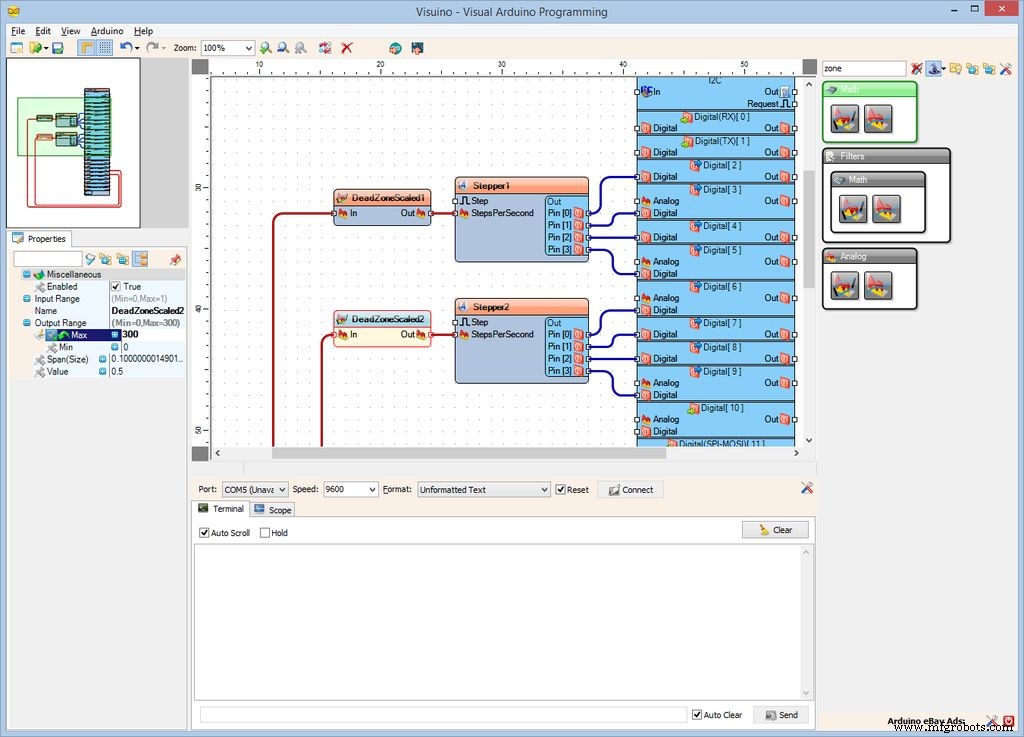
- Wählen Sie im Designbereich DeadZoneScaled2 Komponente (Bild 3 )
- Erweitern Sie im Objektinspektor den "Ausgabebereich " Eigenschaft (Bild 3 )
- Legen Sie im Objektinspektor den Wert von "Max " untergeordnete Eigenschaft von "Ausgabebereich " Eigenschaft auf "300 " (Bild 3 )
- Legen Sie im Objektinspektor den Wert von "Min " untergeordnete Eigenschaft von "Ausgabebereich " Eigenschaft zu "-300 " (Bild 4 )
Schritt 10:Arduino-Code generieren, kompilieren und hochladen
- In Visuino , Drücken Sie F9 oder klicken Sie auf die Schaltfläche in Bild 1 um den Arduino-Code zu generieren und die Arduino-IDE zu öffnen
- In der Arduino-IDE , klicken Sie auf Hochladen Schaltfläche, um den Code zu kompilieren und hochzuladen (Bild 2 )
Schritt 11:Und spielen...

Herzlichen Glückwunsch! Sie haben das Projekt abgeschlossen.
Bild 1 und das Video Zeigen Sie das verbundene und eingeschaltete Projekt an.
Sie können die Stepper steuern mit dem Joystick wie im Video zu sehen . Bewegen des Joysticks nach oben und Runter steuert die Weiterleitung und Rückwärts Rotation eines der Stepper . Bewegen des Joysticks nach links und Recht steuert den anderen Stepper .
Auf Bild 2 Sie können das komplette Visuino sehen Diagramm.
Ebenfalls beigefügt ist das Visuino Projekt, das ich für dieses Tutorial erstellt habe. Sie können es herunterladen und in Visuino öffnen :https://www.visuino.com
FQM7EG7IPOA2W5T.zip
Herstellungsprozess
- Münzprüfer mit Arduino steuern
- Arduino mit Bluetooth zur Steuerung einer LED!
- Bestimmung der Pflanzengesundheit mit TinyML
- Handheld-Geigerzähler mit Arduino Nano
- ThimbleKrox - Maussteuerung mit den Fingern
- Arduino-Joystick
- Steuern Sie eine Kakerlake mit Arduino für unter 30 $
- Autosteuerung mit Arduino Uno und Bluetooth
- Steuern Sie den Arduino-Roboterarm mit der Android-App
- 25-kHz-4-Pin-PWM-Lüftersteuerung mit Arduino Uno