


Wie softwaredefinierte Radios mit Ultra-Wide-Frequency-Tuning umgehen
Ein softwaredefiniertes Funkgerät (SDR) verwendet einen Allzweck-Computerprozessor, um Aspekte der digitalen Signalverarbeitung anstelle von analoger Schaltungshardware durchzuführen. Dies ermöglicht eine größere Flexibilität bei der Anwendung, Verarbeitungsfähigkeit und Dynamikbereich, oft zu geringeren Kosten im Vergleich zu dedizierten Schaltungen. Im Vergleich zu einem vollständig analogen Funkgerät ersetzt ein SDR einige analoge Schaltungen durch äquivalente Softwareimplementierungen, obwohl einige analoge Komponenten erforderlich sind.
Das wichtigste Beispiel für analoge Komponenten, die für jeden SDR erforderlich sind, ist die Sende- oder Empfangsverstärkerschaltung, die mit der Hochfrequenzantenne verbunden ist. Ein wichtiger Teil jedes Funksystems ist ein Mischer, dessen Zweck es ist, die Frequenz eines Signals entweder nach oben oder nach unten zu verschieben – ein Vorgang, der als Überlagerung bezeichnet wird. SDRs verwenden digitale Mischer, die Signale mit komplexen Zahlen darstellen, was ihnen einen erheblichen Vorteil gegenüber ihren analogen Äquivalenten verschafft – sie sind in der Lage, die Frequenz eines Signals nach unten zu DC zu verschieben, während ein analoger Mischer ein Signal nur zu einer niedrigeren Frequenz verschieben kann.
Typischerweise haben SDRs um ihre Mittenfrequenz herum höhere Bandbreiten, wodurch ein größerer Teil des Funkspektrums überwacht und über einen breiteren Bereich abgestimmt werden kann, ohne dass eine Neuabstimmung erforderlich ist. Anders ausgedrückt bedeutet dies, dass SDRs oft in der Lage sind, hohe Momentanbandbreiten über einen weiten Abstimmbereich von DC bis über 18 GHz anzubieten. Aufgrund der Kombination dieser beiden Hochleistungsradioattribute kann die zur Unterstützung der Frequenzabstimmung erforderliche Radio- und Signalverarbeitungshardware variieren.
Es ist wichtig zu beachten, dass die Frequenzmischung und -abstimmung je nach Design und Frequenzbereich an jeder Stelle der Signalkette implementiert werden kann, auch digital oder analog. In diesem Artikel werden die spezifischen Mechanismen diskutiert, die für die Abstimmung verschiedener Frequenzen verfügbar sind, einschließlich Direktabtastung, Phasenquadratur-(IQ)-Mischung und Superheterodyn-Mischung.
Was ist Frequenzmechanik?
In diesem Dokument wird der Begriff Frequenzmechanik verwendet, um sich auf den Prozess zu beziehen, bei dem ein Hochfrequenzsignal in der Frequenz nach unten in einen Bereich verschoben wird, der für die Abtastung durch einen Analog-Digital-Wandler (ADC) geeignet ist, sowie auf die nachfolgenden Frequenzumsetzungen, die auftreten, sobald das Signal digitalisiert ist. Basierend auf der Frequenz des Signals muss ein bestimmter Funkpfad ausgewählt werden – unterschiedliche Funkpfade werden für unterschiedliche Frequenzbereiche optimiert. Innerhalb jeder Funkkette kann die Frequenz durch Analogwandler gemischt werden, wodurch die Frequenz effektiv nach oben oder unten verschoben wird.
In ähnlicher Weise kann auch ein digitales Signal entweder innerhalb des Wandlers oder innerhalb des FPGA verschoben werden. Je nach gewähltem Frequenzbereich kommen unterschiedliche Abtast- und Wandlungsmethoden zum Einsatz. Kurz gesagt, in diesem Artikel werden die spezifischen Stimmmechaniken zusammen mit den relevanten Frequenzmechaniken für jeden Betriebsmodus erörtert.
MethodeAnaloge Tuning-KomponentenFrequenz-Tuning-OrtDirektes SamplingKeineSoftwareIQMixerHardware gefolgt von SoftwareSuperheterodyneIF Downconverter, evtl. zweiter MixerHardwareDirekte Probenahme
Direkte Abtastung bezieht sich auf das Abtasten (oder Senden) von Signalen direkt von der Antenne mit minimalen oder keinen analogen Komponenten dazwischen. Mit anderen Worten, ein Teil des Hochfrequenz-(RF)-Signals wird abgetastet, digitalisiert und zur Verarbeitung an Software weitergegeben. Obwohl es einfach ist, umfassen die Beschränkungen dieses Verfahrens Rauschen und die Verfügbarkeit von Hochgeschwindigkeits-Abtasthardware und -Taktgebern. Da eine große Spreizung des HF-Spektrums abgetastet wird, sind Multiband-Anwendungen ohne Neuabstimmung möglich.
Die Möglichkeit, sich auf verschiedene Frequenzen einzustellen, hängt von der Abtastrate des ADC oder Digital-Analog-Wandlers (DAC) beim Senden ab. Kommerziell erhältliche Wandlergeräte können bis zu 3GSPS (Giga-Samples pro Sekunde) abtasten, wodurch eine große Datenmenge in kurzer Zeit digitalisiert werden kann. Diese Abtastraten ermöglichen das Abtasten von Daten über mehrere Frequenzbänder hinweg, einschließlich vieler kommerzieller Mobilfunkfrequenzbänder.
SDRs werden oft als Transceiver betrieben – Geräte, die sowohl senden als auch empfangen können – und die direkte Abtastkette ist eine von mehreren Ketten, die bei Breitband-SDRs möglich sind. Die direkte Abtastkette wird automatisch gewählt, wenn Frequenzen verwendet werden, die unter denen liegen, die vom analogen Abwärtswandler unterstützt werden.
Basisbandübertragung
Die externe Antenne ist über Schalter und Verstärker mit dem SDR verbunden. Beachten Sie jedoch, dass keine analogen Komponenten zur Frequenzumsetzung verwendet werden. Alle Resampling- und Frequenzumwandlungen werden in Software implementiert und die analoge Schaltung wird ausschließlich zur Signalaufbereitung – Filterung – und Verstärkung verwendet.
Klick für Bild in voller Größe
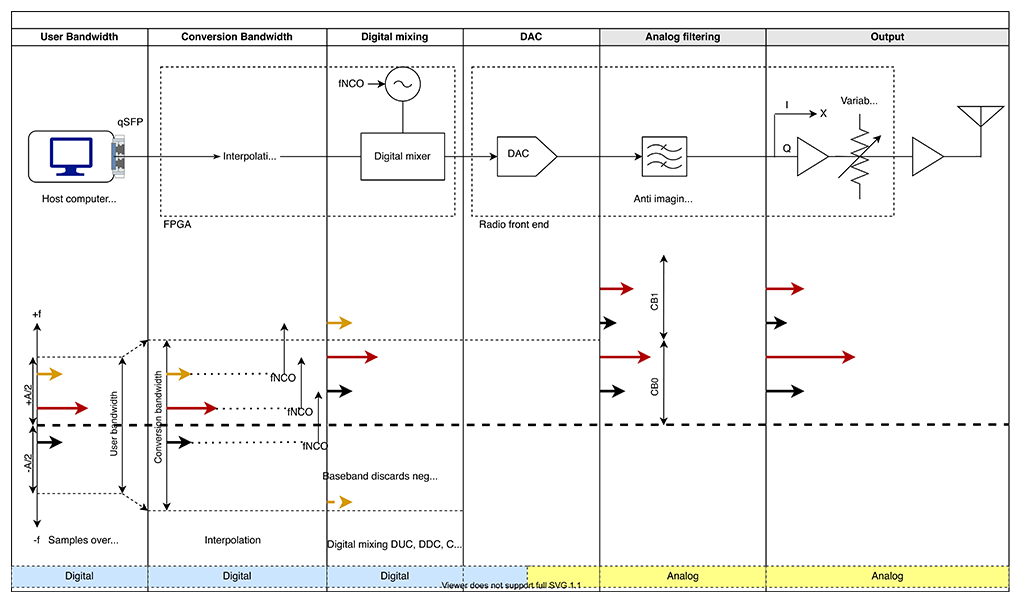
Abbildung 1:Direct Sampling bezieht sich auf die Übertragung von Signalen direkt von der Antenne mit minimalen oder keinen analogen Komponenten dazwischen. Quelle:Per Vices
Beim Betrieb des SDR als Sender werden Daten von der Anwenderapplikation generiert und vom FPGA als Samples empfangen. Die qSFP+-Ports senden die digitalisierten Daten über eine serielle Verbindung zum FPGA, wo Resampling und Frequenzmischung im digitalen Bereich erfolgen. Anschließend durchläuft es die FPGA-basierte Interpolationsroutine, gefolgt von der FPGA-basierten digitalen Aufwärtskonvertierung – unter Verwendung des numerisch gesteuerten Oszillators (NCO). Jede vom Benutzer vorgenommene Frequenzverschiebung erfolgt nach der Interpolation, bevor die Daten an den DAC gesendet werden, wie in Abbildung 1 gezeigt. Die frequenzverschobenen digitalen Daten werden dann vom DAC in ein analoges Signal umgewandelt, das als Teil des Umwandlungsprozesses Spiegelfrequenzen erzeugt . Das jetzt analoge Signal wird durch Anti-Imaging-Filter, durch die Radio-Front-End-Verstärker und dann zur Radioantenne geleitet.
Basisband-Übertragungsmechanik
Während sich die Samples durch die verschiedenen Komponenten im SDR bewegen, ändern sich die Frequenzen und Bandbreiten. Nachdem wir nun unsere Schaltungen gut verstanden haben, schauen wir uns an, was bei jedem dieser Schritte mit dem Signal passiert.
Muster generieren
Die untere Hälfte von Abbildung 1 zeigt drei Wellenformen, die wir möglicherweise übertragen möchten. Bevor die Abtastwerte generiert werden, definiert der Benutzer eine Abtastrate (mit A gekennzeichnet). Die Abtastrate dient zur Angabe der Benutzerbandbreite; ein Intervall [-A/2, A/2], das um 0 Hz zentriert ist. Da diese Wellenformen zu einem späteren Zeitpunkt um die NCO-Frequenz versetzt werden, können die anfänglichen Sinuswellen in einigen Fällen eine negative Frequenz haben – wie das schwarze Signal im Diagramm. Nach der Generierung werden die Samples zur weiteren Verarbeitung über eine serielle Verbindung an den SDR gesendet. Es ist wichtig zu beachten, dass nicht alle Samples in der Benutzerbandbreite übertragen werden – das wird später klar (siehe das gelbe Signal in der obigen Abbildung).
Interpolation
Nach dem Generieren von Benutzerabtastwerten besteht der nächste Schritt darin, eine Interpolation durchzuführen, um eine größere Bandbreite zu erhalten. Diese neue Bandbreite gibt ein größeres Intervall an – ebenfalls um 0 Hz zentriert –, das durch die Abtastrate des Geräts definiert wird (325 MSPS für Crimson TNG, 1 GSPS für Cyan). Die Benutzerbandbreite ist immer kleiner als die Konvertierungsbandbreite. Die Interpolation der Samples auf eine größere Bandbreite ist entscheidend für die nächste Stufe, in der die digitale Aufwärtskonvertierung stattfindet.
Hochkonvertierung
Nach der Interpolation des Signals auf die Konvertierungsbandbreite des Geräts kann der FPGA mit der Aufwärtskonvertierung der Abtastwerte fortfahren. Denken Sie daran, dass die Aufwärtskonvertierung einfach alle Frequenzen um einen festen Betrag nach oben verschiebt – die Frequenz des NCO. Sowohl Crimson TNG als auch Cyan verfügen über CORDIC-Digitalmischer, die sowohl zur Aufwärts- als auch zur Abwärtskonvertierung (DUC, DDC) fähig sind. Die Aufwärtskonvertierung erfolgt durch Mischen der Benutzerabtastwerte mit einem lokalen Oszillator, der sich im FPGA befindet (auf NCO-Frequenz eingestellt). Dadurch erhöht sich die Frequenz aller unserer Signale. Die Verwendung der größeren Umwandlungsbandbreite, die wir durch die Interpolation erhalten haben, stellt sicher, dass wir mehr unserer Mischprodukte erfassen können.
In einigen Fällen (siehe gelbes Signal) führt die Mischung unseres generierten Signals mit der NCO-Frequenz zu einer Frequenz, die nicht innerhalb der Benutzerbandbreite liegt. Hier hat das Mischprodukt immer noch ein Bild, das gedreht wird, um in unsere Erfassungsbandbreite zu passen (siehe die gestrichelte Linie in Gelb). Bei Basisbandsignalen werden negative Frequenzkomponenten verworfen und daher ist dieses Bild nicht relevant und wird ignoriert.
Der DAC wandelt die Signale dann in ihre analoge Form um. Trotz der guten Leistung moderner DACs werden Nyquist-Bilder der Originalsignale existieren; bei jedem Vielfachen unserer Umwandlungsbandbreite werden wir wahrscheinlich Bilder des Signals mit ihren entsprechenden Offsets sehen. Anti-Imaging-Filter werden verwendet, um die Bilder zu unterdrücken, die normalerweise in höheren Nyquist-Zonen angezeigt werden – ein Vielfaches der Konvertierungsbandbreite. Das finale analoge Signal kann nun über die Antenne übertragen werden.
Direkter IQ
Direkte IQ- oder In-Phase-Quadratur-Abtastung ist eine Variante der direkten Abtastung, bei der ein empfangenes HF-Signal in zwei Komponenten aufgeteilt wird, die um 90 Grad in der Phase getrennt sind. Zwei ADC-Kanäle – oder DAC-Kanäle für die Übertragung – werden verwendet, um diese phasenverschobenen Signale abzutasten. Der Vorgang für den direkten IQ-Empfang wird unten beschrieben.
Klick für Bild in voller Größe
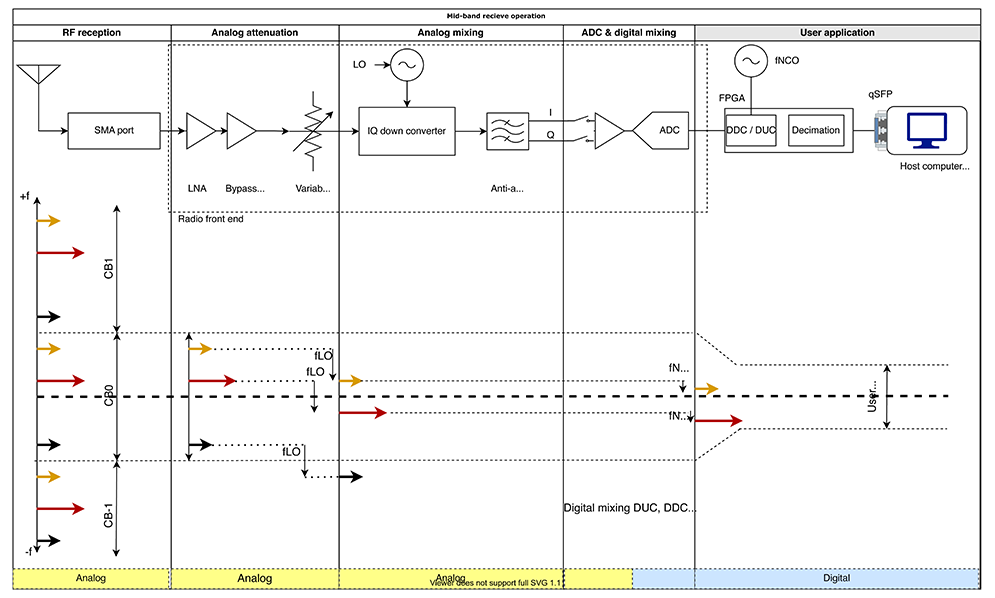
Abbildung 2:Direct IQ-Empfänger, eine Variante des Direct-Samplings, verwendet zwei Kanäle, um phasenverschobene Signale abzutasten. Quelle:Per Vices
Der erste Abschnitt auf der linken Seite von Abbildung 2 zeigt drei reine Sinuswellen und ihre Bilder, wie sie von der Antenne aufgenommen werden. Ein variables Dämpfungsglied dämpft Frequenzen außerhalb des interessierenden Bandes. Die folgende Stufe – der IQ-Modulator – kombiniert die I- und Q-Komponenten zum HF-Signal. Dieser Vorgang verschiebt alle Frequenzen um einen vom Lokaloszillator (LO) bestimmten Betrag nach unten. Beachten Sie, dass dies ein analoger Prozess ist.
Ein analoger Anti-Aliasing-Filter zielt darauf ab, das eingehende Signal auf diejenigen zu beschränken, die in die Domäne des Wandlers fallen. Dies ist wichtig, da der ADC einen endlichen Betriebsfrequenzbereich hat, der durch seine Abtastrate begrenzt ist. Die Wandlerbandbreite gibt ein großes Intervall um 0 Hz an, das durch die Abtastrate des Geräts definiert wird (325 MSPS für Crimson TNG, 1 GSPS für Cyan). Der ADC wandelt die eingehenden Signale in eine digitale Form um.
An diesem Punkt ist die umgewandelte Bandbreite für die digitale Verarbeitung groß. Zur Vorbereitung der Dezimierung werden die Abtastwerte digital herunterkonvertiert. Dadurch wird die Frequenz aller Signale um die am FPGA eingestellte NCO-Frequenz verringert. Der Crimson TNG und Cyan verfügen über CORDIC-Digitalmischer, die sowohl DUC als auch DDC unterstützen können. Die Abwärtswandlung erfolgt durch Mischen der empfangenen Abtastwerte mit einem im FPGA gefundenen Lokaloszillator – eingestellt auf die sogenannte NCO-Frequenz. Beachten Sie, dass danach einige der Frequenzen – wie die in Rot dargestellte – negativ sein können.
Bevor die Abtastwerte empfangen werden, definiert der Benutzer eine Abtastrate (bezeichnet mit B). Die Abtastrate wiederum gibt die Benutzerbandbreite an, ein Intervall [-B/2, B/2], das um 0 Hz zentriert ist. Die Dezimierung stellt sicher, dass alle eingehenden Signale innerhalb der Benutzerbandbreite liegen.
Super-Heterodyn
Ein Überlagerungsempfänger mischt das empfangene HF-Signal (f1) mit einem Referenzsignal von einem lokalen Oszillator (f2), um zwei Signale bei Zwischenfrequenzen von (f1 ± f2) zu erzeugen. Die Zwischenfrequenz (ZF) eines Superheterodyn-Empfängers – abgekürzt zu Super-Het – ist so gewählt, dass sie mit analoger Elektronik einfacher zu verarbeiten ist und folglich über den normalen menschlich hörbaren Frequenzen liegt (daher das Präfix von „super“).
Super-Het-Empfänger
Abbildung 3 zeigt einen Superhet-Empfänger. Beachten Sie, dass der Einfachheit halber nur ein Empfänger dargestellt ist – die äquivalente Übertragungsschaltung verwendet ähnliche Komponenten mit umgekehrtem Signalfluss. Die zugehörigen Analogstufen werden automatisch ausgewählt, wenn der Benutzer eine Arbeitsfrequenz im Superhet-Bereich wählt. Ein Superhet-Empfänger wandelt zuerst die empfangene HF unter Verwendung eines analogen Mischers herunter. Dies wird durch eine geeignete separate Schaltung erreicht, die in Abbildung 3 als „LOgen-Platine“ bezeichnet ist. Bei einer solchen Hochfrequenz-Analogmischung entstehen sogenannte Schwebungsfrequenzen oder Vielfache der ZF. Vor der Digitalisierung sind analoge Filter erforderlich.
Klick für Bild in voller Größe
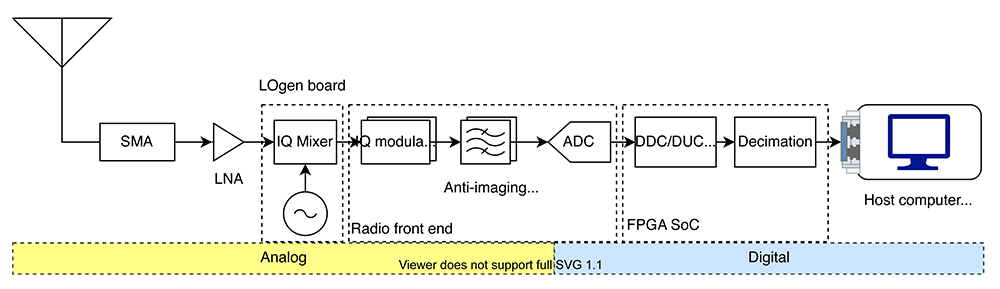
Abbildung 3:Die ZF des Superheterodyn-Empfängers ist so gewählt, dass sie mit analoger Elektronik einfacher zu verarbeiten ist. Quelle:Per Vices
Eine zweite Stufe der Abwärtskonvertierung wird unter Verwendung des IQ-Modulators implementiert, gefolgt von Anti-Imaging-Filtern, um Konversionsprodukte zu entfernen, die durch den Hochfrequenz-Mischprozess erzeugt werden. Die ZF ist jetzt digitalisiert und kann vor der Dezimierung und endgültigen Verwendung in Software mit digitalen Mischern weiter gemischt werden.
Kompromisse verstehen
Abhängig von der Arbeitsfrequenz wählt ein Breitband-SDR aus den verfügbaren analogen Schaltungen aus. Beim Arbeiten mit Basisbandfrequenzen oder Direktabtastung ist keine analoge Mischung möglich und die Frequenz wird durch die Taktgeschwindigkeit der Schaltung begrenzt. Beim Arbeiten mit höheren Frequenzen werden analoge Mischerschaltungen benötigt, und die Anzahl der analogen Mischstufen hängt wiederum von der Frequenz ab. Das Arbeiten im GHz-Bereich erfordert typischerweise eine superhet analoge Schaltung und typischerweise zwei analoge Mischschaltungen, um die Signalfrequenz auf den Arbeitsbereich der digitalen Komponenten wie ADCs oder DACs abzusenken.
Die Verwendung eines einzelnen Geräts für die Breitbandabstimmung erfordert ein Verständnis der Kompromisse verschiedener Verfahren. Beispiele hierfür sind Signalartefakte, die durch analoges Mischen verursacht werden, oder die Kosten von Hochgeschwindigkeits-Umwandlungsvorrichtungen, wenn ein analoges Mischen nicht erwünscht ist. Es ist wichtig, mit Anbietern zusammenzuarbeiten, die über Erfahrung in der Entwicklung für den Breitbandbetrieb verfügen und in der Lage sind, ihre Produkte an die spezifischen Anforderungen eines bestimmten Projekts anzupassen. Es ist am besten, einen Anbieter basierend auf seinen verfügbaren Produkten, Spezifikationen, unterstützten Anwendungen und einer Diskussion über seine Fähigkeiten auszuwählen.
>> Dieser Artikel wurde ursprünglich auf unserer Schwesterseite EDN . veröffentlicht .
 Victor Wollesen ist CEO der Per Vices Corporation.
Victor Wollesen ist CEO der Per Vices Corporation.  Eldrich Rebello ist Elektroingenieur am Wind Energy Institute of Canada.
Eldrich Rebello ist Elektroingenieur am Wind Energy Institute of Canada. Verwandte Inhalte:
- Satellitennavigation und Software Defined Radio
- Softwaredefinierte Automobile:Eine effiziente Plattform für die notwendige Parallelisierung
- IoT-Sicherheit – Softwaredefinierter Perimeter und Blockchain
- Open-Source-SDN-Projekt erhält Google-Code
- Warum DSPs plötzlich überall sind
Für mehr Embedded, abonnieren Sie den wöchentlichen E-Mail-Newsletter von Embedded.
Eingebettet
- Radio
- So stellen Sie die beste Leistung der Qt-Zustandsmaschine sicher
- Wie analoges In-Memory-Computing die Leistungsherausforderungen der Edge-KI-Inferenz lösen kann
- Wie man Verarbeiter vertrauenswürdig macht
- Wie Motion Tracking den Benutzerkomfort erhöht
- Wie niedrig (Energie) können Sie gehen?
- Prozessor-in-Memory-Chip beschleunigt KI-Berechnungen
- Sie stellen jetzt ein? Umgang mit einem Zustrom von Bewerbern
- Wie geht man mit Nichtkonformitäten in Produktionslinien um?
- So reparieren Sie Ihren Autotürgriff