


Referenzdesign vereinfacht die Motorsteuerung von Industrierobotern
Ein neues Referenzdesign beschleunigt die Entwicklung von End-of-Arm-Werkzeugen für Industrierobotik mit Einachs-Servocontroller/Treibermodul mit integrierter Bewegungssteuerung.
Trinamic, jetzt Teil von Maxim Integrated, demonstrierte eine Reihe von Leistungssteuerungslösungen an der Spitze der APEC, einschließlich seiner neuesten Lösungen, die die Entwicklung von End-of-Arm-Tooling (EoAT) für die Industrierobotik und den einachsigen Servocontroller vereinfachen. Treiber mit integrierter Bewegungssteuerung. In einem Interview mit Power Electronics stellten Jeff DeAngelis, Vice President Industrial Communications bei Maxim Integrated, sowie Jonas Proeger, Director of Business Management, und Stephan Kubisch, Director Product Definition, beide bei Trinamic, diese neuesten Lösungen vor, die die Entwicklungszeit beschleunigen verschiedene industrielle Automatisierungsanwendungen.
Das Open-Source-Referenzdesign TMCM-1617-GRIP-REF integriert einen feldorientierten Hardware-Controller (FOC) und drei Kommunikationsports. Es umfasst den industrietauglichen IC MAX22000 von Maxim Integrated, den IO-Link-Transceiver MAX22515, einen per Software konfigurierbaren, hochpräzisen analogen E/A und den MAX14906, einen digitalen Vierkanal-E/A zum Konfigurieren des Betriebsmodus des Single- Achs-Servoantrieb.
Das neue Servocontroller-/Treibermodul TMCM-1321 soll die Leistung von zweiphasigen bipolaren Schrittmotoren optimieren, indem die Achsgeschwindigkeit und -synchronisation optimiert und die Leistungsverluste reduziert werden. Maxim Integrated wies darauf hin, dass das Gerät einen magnetischen Encoder und digitale Eingänge für optische Encoder integriert, um die Servosteuerung mit fortschrittlichem Feedback und Diagnose zu vereinfachen.
Open-Source-Plattform
„Der Vorteil des Referenzdesigns TMCM-1617-GRIP-REF ist seine Fähigkeit, mehrere Schaltkreise auf einer Platine zu integrieren, die normalerweise auf mehrere Platinen oder Komponenten am Ende eines Roboterarms verteilt wäre. Diese kompakte Grundfläche kombiniert eine vereinfachte Kommunikationsbusschnittstelle, die den Kabelbaumaufwand reduziert und eine optimierte Möglichkeit bietet, sowohl Daten als auch Strom über ein einzelnes oder doppeltes Kabelpaar zu übertragen sowie das Werkzeug korrekt in Betrieb zu nehmen. Diese kompakte Größe und vereinfachte Kommunikations- und Konfigurationsbusschnittstelle ist mit unserer TMCL-IDE-Softwareentwicklungsumgebung gekoppelt, was sie zu einem sehr vielseitigen Referenzdesign für End-of-Arm-Tooling macht“, sagte DeAngelis. Er fügte hinzu:„Neben der kompakten Größe ist ein weiterer wichtiger Faktor das sehr geringe Gewicht dieses Moduls von 24 Gramm.“
Wie von Proeger beschrieben, zeigt das Blockschaltbild von Abbildung 1 eine Kraftmessdose zum Erfassen der Kraft, die vom Arm oder vom Greifer oder Näherungssensor kommt. TMCM-1617-GRIP-REF unterstützt die industriellen Kommunikationsprotokolle EtherCAT, IO-Link und RS-485 und bietet ein analoges Signal sowie softwareprogrammierbare digitale Ein-/Ausgänge und kann mit der Trinamic Motion Control Language Integrated Development Environment (TMCL- IDE). „Wir bieten die nach wie vor beliebte Option der RS-485-Kommunikation mit 100 Megabit pro Sekunde. Der Vorteil ist, dass es sich nach wie vor um eine traditionelle Hochgeschwindigkeitsverkabelung handelt, um den Anforderungen dieser Anwendung gerecht zu werden. Aus kommunikationstechnischer Sicht ist es ein sehr flexibles Produkt, da es sich um einen traditionelleren Ansatz zur Steuerung des Motors handelt“, sagte Proeger.
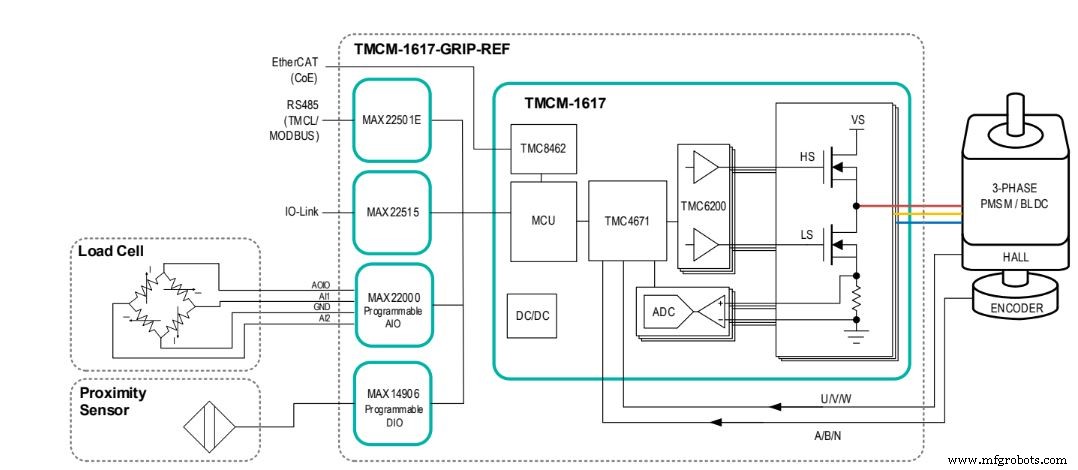
Abbildung 1:Blockschaltbild von TMCM-1617-GRIP-REF (Quelle:Maxim Integrated)
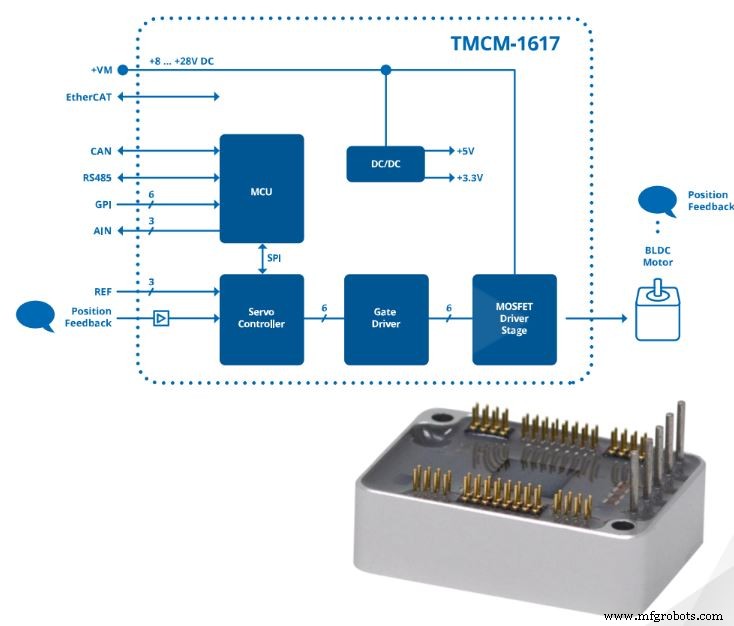
Abbildung 2:TMCM-1617 – Kleinster Servocontroller (Quelle:Maxim Integrated)
„Wir stellen alle erforderlichen Versorgungsschienen zur Verfügung, um externe Peripherie und Sensoren zu unterstützen, ohne dass eine zusätzliche Stromquelle benötigt wird“, so Kubisch. Er fügte hinzu:„Eine perfekte Stromregelung hat den größten Einfluss auf die Gesamtsystemeffizienz.“
Mit modernsten Busarchitekturen, kombiniert mit integrierter Steuerung und Diagnose in einer einzigen Lösung, ist Maxim Integrated davon überzeugt, dass das Referenzdesign die Produktivität in der Fabrikhalle steigern und künstliche Intelligenz an den Rand bringen kann. Zum Beispiel bietet der MAX22515 Onboard-Features wie einen umfassenden integrierten Schutz, um eine robuste Kommunikation in rauen Industrieumgebungen zu gewährleisten. Alle Pins der IO-Link-Leitungsschnittstelle (V24, C/Q, DI und GND) sind verpolungssicher, kurzschlussfest, Hot-Plug-geschützt und verfügen über einen integrierten Überspannungsschutz von ±1,2 kV/500 .
Für die Zukunft der Motor- und Bewegungssteuerung führt die steigende Komplexität in Verbindung mit der Forderung nach höchster Zuverlässigkeit zu mehr Smartness des Systems – und das muss am Edge, dezentral sein. Entscheidungen müssen in Echtzeit getroffen werden, Daten müssen an der Quelle gesammelt und in der Cloud geteilt werden.
Servocontroller/Treiber TMCM-1321
Der TMCM-1321 ist ein einachsiger Controller/Treiber für zweiphasige bipolare Schrittmotoren mit integriertem magnetischem Encoder und digitalen Eingängen, die alle eine Closed-Loop-Steuerungslogik zur Optimierung der Motorsteuerung bieten.
Maxim Integrated wies darauf hin, dass der Formfaktor deutlich kleiner sein soll als bei anderen Lösungen und das Board 256x Microstepping bei rauschfreiem Betrieb unterstützt. Der integrierte magnetische Encoder kann verwendet werden, wenn ein geeigneter Magnet an der Motorachse angebracht ist, was einen Closed-Loop-Betrieb ermöglicht. Alternativ kann über die ABN-Digitaleingänge ein optischer Encoder angeschlossen werden. Es können verschiedene Rampenformen gewählt werden. Zusätzlich zur linearen Rampe und Trinamic SixPoint™-Rampe implementiert das TMCM-1321-Modul eine S-förmige Rampe, die die tatsächliche Übertragungszeit beschleunigen kann.
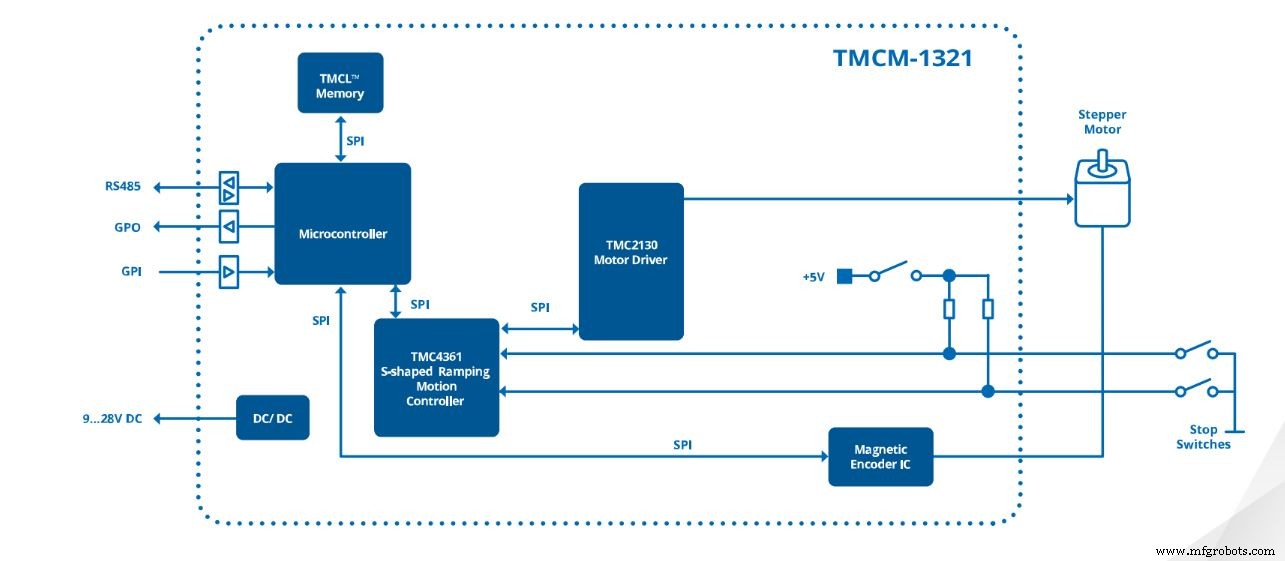
Abbildung 3:Blockschaltbild von TMCM-1321 (Quelle:Maxim Integrated)

Abbildung 4:TMCM-1321-Platine (Quelle:Maxim Integrated)
Das TMCM-1321 ist für Spulenströme bis 0,7A RMS und 24V DC Versorgungsspannung ausgelegt. Drei digitale Eingänge können als Endschalter- und Referenzschaltereingänge oder als Universaleingänge verwendet werden.
Motorsteuerung und Antriebe sind in vielen Anwendungen von grundlegender Bedeutung, da sie ein hohes Maß an Genauigkeit ermöglichen, was wiederum zu geringeren Kosten und höherer Effizienz führt. Die entscheidende Funktion eines Motorsteuerkreises besteht darin, sicherzustellen, dass der Rotor bei unterschiedlichen Betriebs- und Lastbedingungen eine genaue Position bezüglich der Wicklungen einnimmt, um seine Position mit ausreichender Genauigkeit zu bestimmen.
>> Dieser Artikel wurde ursprünglich auf unserer Schwesterseite Power . veröffentlicht Elektroniknachrichten.
Verwandte Inhalte:
- Entwicklung von Motorsteuerungen für Robotersysteme
- Roboter bauen mit Ada, Teil 2 – Die Motoren antreiben
- Lösung der Designherausforderungen für deterministische Mehrachsen-Motorsteuerungen
- Software erleichtert das Design von BLDC-Motortreibern
- Entwicklungskits bieten Plattformen für digitale Stromversorgungs- und Motorsteuerungsdesigns
- Entwurf eines schnell reagierenden Feedback-Systems für miniaturisierte motorbetriebene Designs
Für mehr Embedded, abonnieren Sie den wöchentlichen E-Mail-Newsletter von Embedded.
Eingebettet
- Renesas erweitert Mikrocontroller-Optionen für die Servosteuerung in Industrierobotern
- Front-End-Modul vereinfacht das Wi-Fi 6-Design
- Entwicklung von Motorsteuerungen für Robotersysteme
- Motorcontroller integriert Arm Cortex-M0-Kern
- Integrierte Treiber erleichtern das Design von Schrittmotoren
- Vorteile der industriellen Steuerungskonvergenz
- Industrielle Schalttafeln verstehen
- Grundlagen des Bedienfelddesigns
- Was ist Industriedesign-Prototyping?
- Über Industriemotoren und Anwendungen