


Antrieb von Motoren in batteriebetriebenen IoT-Systemen
Lernen Sie Designtechniken für Motortreiber, um die Batterielebensdauer in batteriebetriebenen Motorsystemen zu verlängern.
Viele batteriebetriebene Systeme und Internet-of-Things-Anwendungen (IoT) – wie intelligente Zähler, intelligente Hygieneprodukte, Video-Türklingeln, Roboterspielzeug, Körperpflegeprodukte und elektronische Schlösser – enthalten einen Motor, ein Solenoid oder ein Relais. Die Interaktion zwischen der Batterie und der Motorphysik bringt einige interessante Designherausforderungen mit sich, wie z. B. der zuverlässige Betrieb des Systems bei Änderungen der Batteriespannung, die Minimierung der Standby-Leistung zur Erhöhung der Systemlebensdauer und die Zufuhr hoher Ströme zum Motor während des Anlaufens und Abwürgens.
In diesem Artikel gebe ich einige Tipps, um diese Designherausforderungen zu meistern.
Übersicht über batteriebetriebene Motorsysteme
Der dem Motortreiber zur Verfügung stehende Batteriespannungsbereich hängt von der Batteriechemie, der Entladetiefe, der Temperatur, dem Laststrom und der Anzahl der in Reihe oder parallel geschalteten Batteriezellen ab. Obwohl die Batteriemodellierung eine komplexe Wissenschaft ist, beginnen wir mit einem einfachen Batteriemodell unter Verwendung der Leerlaufspannung (VOCV ), interner Batteriewiderstand (RBAT ) und Batterieklemmenspannung (VBAT ), wie in Abbildung 1 gezeigt .
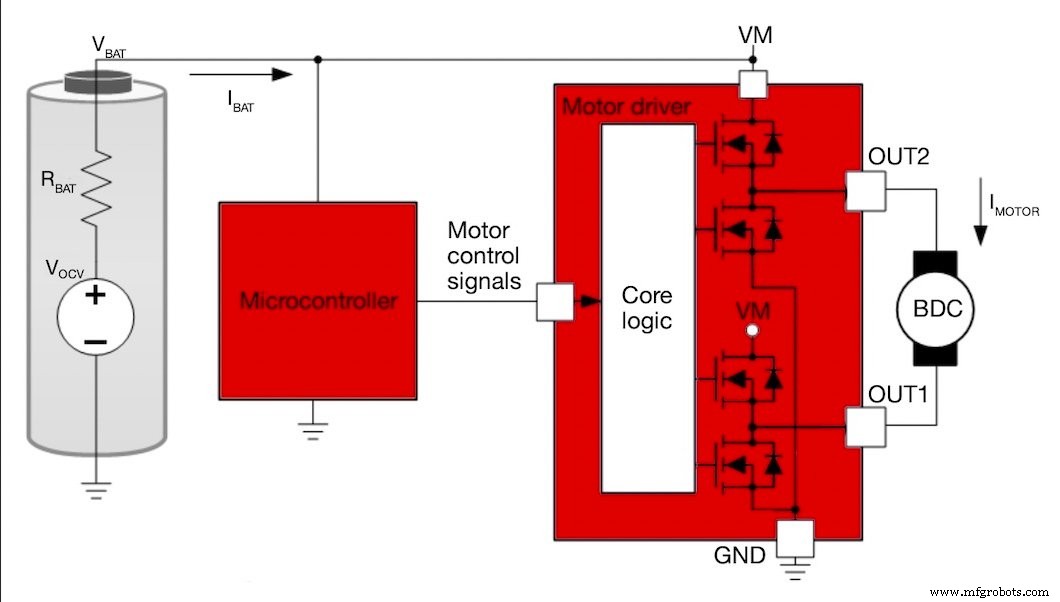
Abbildung 1. Blockschaltbild eines batteriebetriebenen Systems mit Motortreiber und Motor.
Tabelle 1 zeigt einige Beispiele für Batteriespannungsbereiche für verschiedene Batteriechemien.
| Batteriechemie und Stapelung | VBAT voll geladener Batterie | VBAT leerer Akku | RBAT | Kapazität |
| 2 AA (alkalisch), Duracell OP1500 | 1,7 V/Zelle 3,4 V insgesamt | 0,8 V/Zelle 1.6 V gesamt | 100-250 m²/Zelle 200-500 m² insgesamt | 2.400 mAh* |
| 3 AAA (alkalisch), Panasonic LR03AD | 1,55 V/Zelle 4,65 V insgesamt | 0,8 V/Zelle 2,4 V insgesamt | 135 m²/Zelle (Durchschnitt) 405 m² insgesamt (Durchschnitt) | 2.640 mAh |
| 4 AA (alkalisch), Energizer E91 | 1,5 V/Zelle 6 V/Zelle | 0,8 V/Zelle 3,2 V gesamt | 150-300 m²/Zelle (frisch) 600-1200 m² insgesamt (frisch) | 2.500 mAh* |
| 1 Lithium-Ionen, Panasonic NCR18650BF | 4,2 V | 2,5 V | 77 m²* | 3.200 mAh |
| 2 Lithium-Polymer, Farnell SR674361P | 4,2 V/Zelle 8,4 V insgesamt | 2,75 V/Zelle 5,5 V insgesamt | 160 m²/Zelle 320 m² insgesamt | 2.000 mAh |
*Parameter berechnet aus anderen Batteriedatenblattparametern
Tabelle 1. Ungefähre Batterieparameter für verschiedene Batteriechemien und Aufbauten.
RBAT und VOCV sind wichtige Beiträge zu VBAT während der Lebensdauer der Batterie ändern. Wenn die Batterieladung nachlässt, VOCV nimmt ab und RBAT steigt. Da die Last Strom aus der Batterie zieht (IBAT ), VBAT sinkt aufgrund des Spannungsabfalls an RBAT .
Abbildung 2 zeigt die Beziehung zwischen VOCV , RBAT und ichBAT über die gesamte Batterielebensdauer.
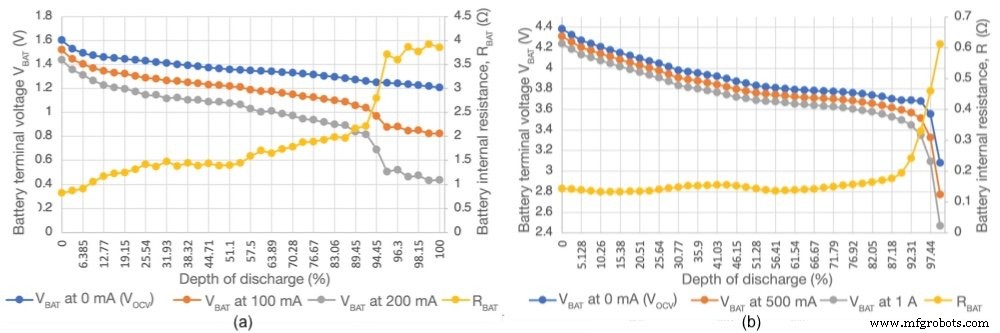
Abbildung 2. Diagramme von VBAT und RBAT für alkalische (a) und Lithium-Ionen (b) Batterien für verschiedene Batterieladeströme (IBAT) basierend auf Daten aus der chemischen Identifikationsdatenbank von TI.
Die Entladetiefe (DoD) gibt die Batterielebensdauer in Prozent in Bezug auf die volle Batterieladekapazität in Milliamperestunden (mAh) an. Ein DoD von 100 % steht für eine vollständig entladene Batterie.
Design für ein breites VBAT Reichweite
Weil VBAT ändert sich mit DoD und IBAT , muss die Versorgungsschiene für einen Motortreiber einen Bereich möglicher Batteriespannungen berücksichtigen. Viele Motortreiber, die für 24-V-Systeme ausgelegt sind, haben beispielsweise eine Mindestversorgungsschiene von 4,5 V. Bei vier in Reihe geschalteten Alkalibatterien kann sich ein Motortreiber mit einer Mindestversorgungsleistung von 4,5 V selbst durch Unterspannungssperre deaktivieren, bevor die Batterien vollständig geladen sind abtropfen lassen.
DRV8210 und DRV8212 von Texas Instruments (TI) sind Beispiele für Motortreiber, die für batteriebetriebene Anwendungen mit einer Versorgungsleistung von 1,65 V bis 11 V entwickelt wurden. Dies nimmt die maximale Spannung für einen zweizelligen Lithiumbatteriestapel (8,4 V) auf oder ein fast entladener zweizelliger Alkalibatteriestapel (1,65 V).
Design für den stromsparenden Standby-Modus
Batteriebetriebene Systeme verbringen die meiste Zeit ihrer Betriebszeit im Standby-Zustand. Verbraucher dürfen beispielsweise nur zweimal am Tag motorisierte Jalousien bedienen oder ein elektronisches Schloss bis zu 20 Mal pro Tag ver- und entriegeln. Das Ventil eines Gas- oder Wasserzählers darf immer nur einmal im Jahr ansteuern. Der Ruhestrom des Gesamtsystems muss gering sein, um in diesen Systemen lange Batterielebensdauern zu erreichen.
Das Hinzufügen von Lastschaltern auf den Versorgungsschienen von Peripheriegeräten im System ist eine Möglichkeit, den Standby-Strom niedrig zu halten. Eine andere Möglichkeit besteht darin, Geräte mit niedrigen Standby-Strömen zu verwenden, die für Batterieanwendungen optimiert sind. Der DRV8210 und der DRV8212 haben Ruheströme von <84,5 nA, um den Standby-Stromverbrauch des Systems zu reduzieren. Andere Möglichkeiten, den Standby-Strom des Systems zu reduzieren, bestehen darin, Widerstandsteiler zu eliminieren und Gerätelogik-Pins mit Pulldown-Widerständen auf 0 V zu setzen, wenn sie nicht in Betrieb sind.
Management großer Ströme, um den Energieverbrauch zu senken und die Betriebsdauer zu verlängern
Große Ströme von Motoren verursachen in Batteriesystemen zwei Probleme:Sie verbrauchen Energie unproduktiv und können aufgrund des Spannungsabfalls an RBAT . dazu führen, dass das System vorzeitig in einen batteriearmen Sperrzustand übergeht . Es gibt zwei Hauptursachen für große Motorströme:Einschaltstrom während des Motorstarts und Blockierstrom. Abbildung 3 zeigt ein Beispiel für diese Ströme.
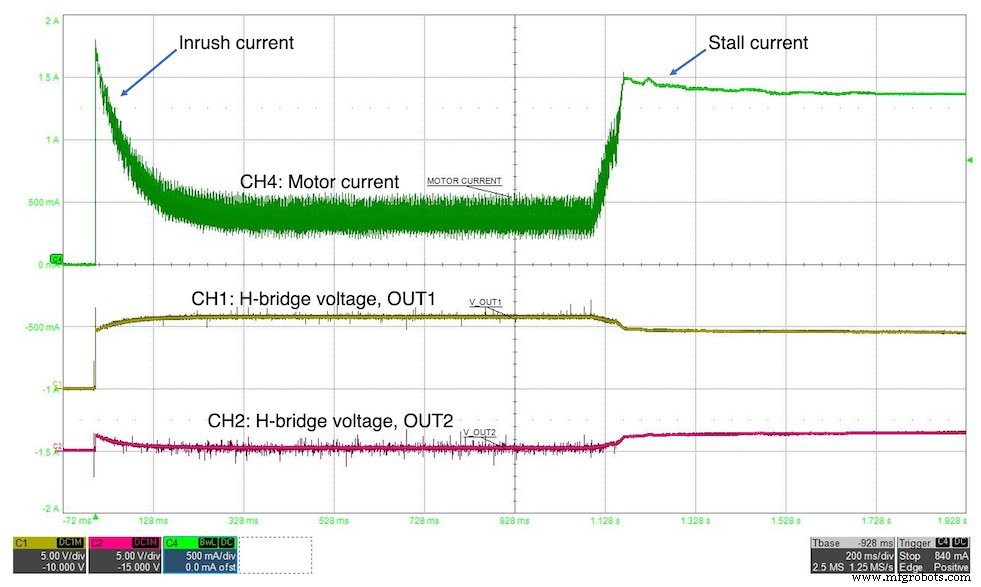
Abbildung 3. Einschalt- und Stillstandsströme.
Das Implementieren einer Sanftanlaufroutine für den Motor durch Rampen des Pulsweitenmodulations-Tastverhältnisses kann den großen Einschaltstrom während des Motorstarts abschwächen. Abbildung 4 zeigt Beispiele für Hardstart- und Softstart-Implementierungen für einen leeren Stapel von vier AAA-Batterien.
In Abbildung 4(a) , bewirkt der Einschaltstrom des Motors, dass die Batteriespannung während eines harten Starts aufgrund des Spannungsabfalls an RBAT . abfällt . Wenn dieses System zurückgesetzt wird oder in einen Unterspannungs-Sperrzustand bei etwa 3,5 V übergeht, kann der Motor nicht über die Erstinbetriebnahme hinaus betrieben werden.
Abbildung 4(b) zeigt, wie die Verwendung eines Sanftanlaufs zu einem geringeren Spannungsabfall auf der Versorgungsschiene führt, was dazu beitragen kann, bei einem System mit entladener Batterie etwas mehr Betriebsdauer zu erzielen.
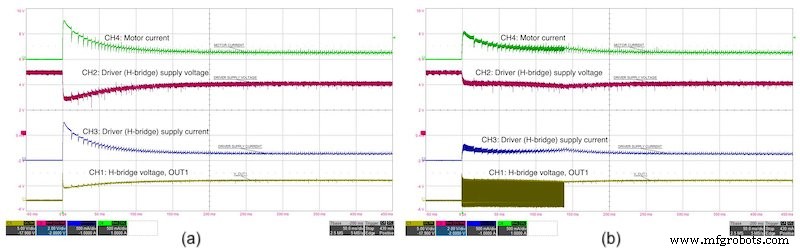
Abbildung 4. Schwer- (a) und Softstart (b) Einschaltstrom bei vier leeren AAA-Batterien in Reihe mit dem DRV8210. Die hier gezeigte Softstart-Routine erhöht das Tastverhältnis während des Motorstarts von 0 % auf 100 %.
Um Blockierströme zu kontrollieren, kann das Hinzufügen eines Strommesswiderstands dem Mikrocontroller helfen, ein Blockieren zu erkennen und den Motortreiber zu deaktivieren, bevor über einen längeren Zeitraum große Blockierströme gezogen werden. Blockierbedingungen können durch eine unbeabsichtigte mechanische Blockierung oder durch das Erreichen eines Endanschlags durch die mechanische Last auftreten (z. B. ein vollständig betätigter Riegel in einem Smart Lock).
Abbildung 5 zeigt eine beispielhafte Systemimplementierung mit dem DRV8212.
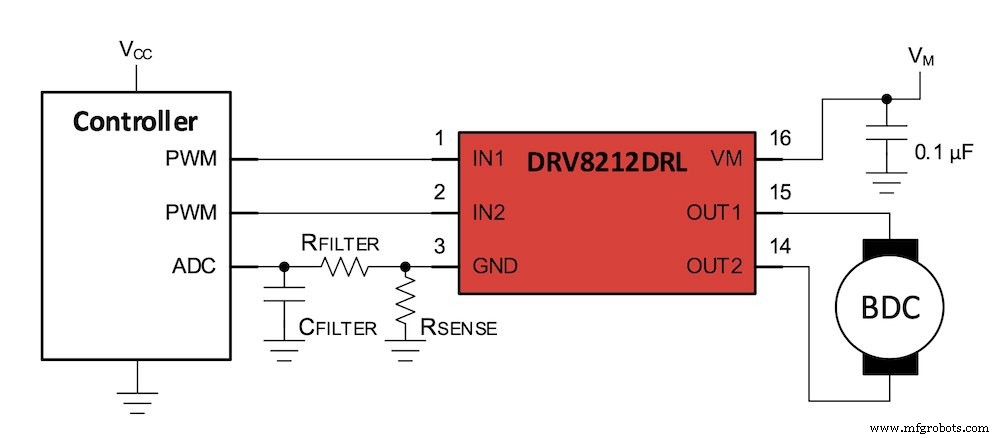
Abbildung 5. Beispielblockdiagramm einer Implementierung der Stall-Erkennung mit dem DRV8212.
Der Analog-Digital-Wandler des Mikrocontrollers misst die Spannung des Messwiderstands und vergleicht diese Spannung mit einem in der Firmware gespeicherten Schwellenwert. Wenn die Strommessung den Schwellenwert für eine bestimmte Zeit überschreitet, deaktiviert der Mikrocontroller den Motortreiber, um Strom zu sparen. Es ist wichtig, die Zeitdauer für die Blockiererkennung zu konfigurieren, damit der Einschaltstrom nicht versehentlich die Blockiererkennung auslöst.
Abbildung 6 zeigt ein Motorstromprofil während einer Blockierbedingung mit implementierter Blockiererkennung, während Abbildung 3 zeigt die Wellenform des Motorstroms ohne Blockiererkennung.
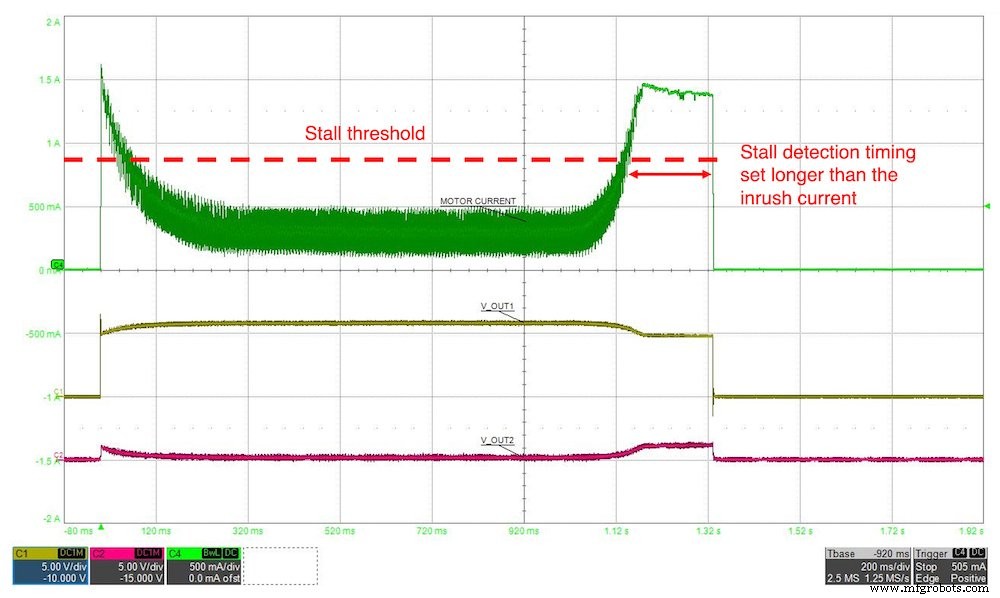
Abbildung 6. Motorstromprofile mit Blockiererkennung.
Batteriehersteller messen die Batteriekapazität in mAh, daher hilft die Begrenzung sowohl der Höhe des Einschaltstroms als auch der Dauer des Blockierstroms, die Batterielebensdauer zu verlängern.
Schlussfolgerung
Aufgrund der begrenzten Batterielebensdauer, Batteriespannungsschwankungen und großen Motorströmen kann es eine Herausforderung sein, batteriebetriebene Systeme zu entwickeln, die Motoren verwenden. Die Verwendung eines Motortreibers, der für den Spannungsbereich der Batterie ausgelegt ist, erleichtert den Entwurfsaufwand, indem zusätzliche Aufwärtswandler eliminiert und die minimale Batteriebetriebsspannung berücksichtigt werden.
Die Minimierung des gesamten Standby-Stroms des Systems und die Verwendung eines Motortreibers mit einem Energiesparmodus reduzieren die Energieverschwendung aus der Batterie. Sowohl Softstart- als auch Blockiererkennungstechniken können auch dazu beitragen, die Lebensdauer von Batterieanwendungen zu verlängern, indem sie die Größe und Dauer großer Motorströme im System reduzieren.
Durch die Verwendung dieser Techniken können Systemdesigner die Betriebslebensdauer von batteriebetriebenen Systemen wie intelligenten Sanitärprodukten, motorisierten Jalousien, elektronischen intelligenten Schlössern und anderen verlängern.
Branchenartikel sind eine Inhaltsform, die es Branchenpartnern ermöglicht, nützliche Nachrichten, Nachrichten und Technologien mit All About Circuits-Lesern auf eine Weise zu teilen, für die redaktionelle Inhalte nicht gut geeignet sind. Alle Branchenartikel unterliegen strengen redaktionellen Richtlinien, um den Lesern nützliche Neuigkeiten, technisches Know-how oder Geschichten zu bieten. Die in Branchenartikeln zum Ausdruck gebrachten Standpunkte und Meinungen sind die des Partners und nicht unbedingt die von All About Circuits oder seinen Autoren.
Internet der Dinge-Technologie
- Untersuchung des zellularen IoT:Kosten, Batterie und Daten
- Intelligente Fertigung und das IoT treiben die nächste industrielle Revolution voran
- LoRa-Technologie treibt die Einführung des IoT voran und verändert Leben
- Starke Führung fördert die Einführung des IoT
- Sechs Schritte zur Sicherung eingebetteter Systeme im IoT
- Altes trifft auf IoT, SaaS-Integration
- Was ist IoT-Sicherheit?
- Partnerschaft zielt auf endlose Batterielebensdauer von IoT-Geräten ab
- Das industrielle IoT ist nicht das Allheilmittel, das uns versprochen wurde … noch nicht
- Anwendungen von industriellen IoT-infundierten Luftqualitätsüberwachungssystemen