


Signalinterferenzen beeinträchtigen die Sicherheit von Fahrzeugradaren
Das wenig beachtete Thema Radarsicherheit entwickelt sich als potenzielle Achillesferse fahrerassistierter und hochautomatisierter Fahrzeuge:Radarsignale stören sich gegenseitig.
Radar ist zu einer unverzichtbaren Erfassungsmodalität geworden, die CMOS-Bildgebungskameras ergänzt. Radar funktioniert bei allen Wetterbedingungen und ermöglicht eine Reihe automatisierter Fahrfunktionen, einschließlich automatischer Notbremsungen (AEB). Aber Radare können vereitelt oder fehlerhaft sein, wenn sie, wie die Teilchenbeschleuniger von Ghostbusters, sich gegenseitig kreuzen.

"Ich habe etwas sehr Wichtiges vergessen, dir zu sagen.
Überquere nicht die Bäche. Es wäre schlecht.“
Obwohl dies noch kein Phänomen ist, das von Automobilherstellern öffentlich gewarnt oder von Autofahrern allgemein wahrgenommen wird, werden Fahrzeugradare, die in überfüllten Umgebungen betrieben werden, erheblichen Störungen ausgesetzt sein.
Das Anwendungssegment von Radar reicht von adaptiver Geschwindigkeitsregelung und Toter-Winkel-Erkennung bis hin zu Frontkollisionswarnsystemen und intelligenten Parkassistenten. Damit ein Fahrzeug eine 360-Grad-Sicht erhält, benötigt es sowohl Nahbereichs- als auch Fernbereichsradarchips. AEB verwendet normalerweise Radar (Allwetter) und manchmal Lidar und Kameras, um einen bevorstehenden Absturz zu erkennen.
Die schnelle Verbreitung von AEB auf dem Weltmarkt ist für die Anbieter von Radarsensoren zu einem zweischneidigen Schwert geworden. Es ist sowohl ein Grund zum Feiern als auch Anlass zur Sorge.
Das China New Car Assessment Program (NCAP) hat beispielsweise bereits AEB für alle Lkw vorgeschrieben, die 2020 ab Werk auf den Markt kommen. Neue Autos in Japan müssen ab diesem Jahr über die Front- und Heck-AEB-Funktionen verfügen. In den USA haben sich 20 Autohersteller auf eine freiwillige „100-prozentige AEB-Fit-Rate bei Neuwagen im Jahr 2022“ verständigt. Angesichts der Euro NCAP-Anforderungen von 2019 sind bereits 90 Prozent der in Europa verkauften Autos mit der neuesten Technologie zur Unfallvermeidung für Auto-zu-Auto-Aufprall ausgestattet.
NXP Semiconductors prognostiziert, dass die Penetrationsrate von Kfz-Radaren im Jahr 2030 auf 55 Prozent steigen wird. In einem aktuellen Interview mit der EE Times , warnte Huanyu Gu, Senior Product Marketing Manager bei NXP Semiconductors, verantwortlich für ADAS und V2X, dass Radarinterferenzen unvermeidlich seien und sagte:sichtbarer Pfad.“
Gu von NXP ist nicht der Einzige, der sich Sorgen macht. Martin Duncan, General Manager der ADAS- und ASIC-Abteilung von ST Microelectronics, sagte auch der EE Times „Dass wir mittlerweile 25 % der Neufahrzeuge mit Radarsystemen haben, ist schon ein Thema. Wenn Sie versuchen, die Straßenbedingungen in Echtzeit zu erfassen, ist es sehr einfach, Übertragungen von mehreren Fahrzeugen zu sehen. Da wir alle dasselbe Frequenzband verwenden, wird sich dies möglicherweise mit zunehmender Anpassungsrate verschlechtern.“
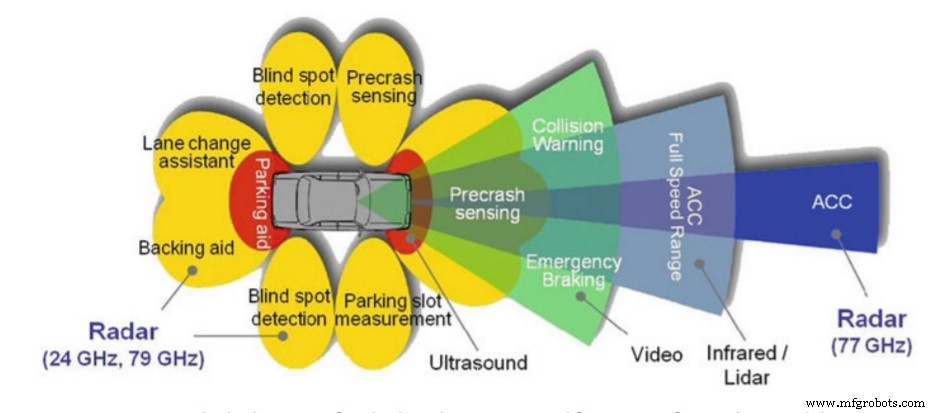
Ein Beispiel für den Einsatz mehrerer Radarsensoren für aktive Sicherheit und assistierte Fahrsysteme (Kissinger, 2012)
Das Prinzip der Radarüberlastung ist einfach. Die National Highway Traffic Safety Administration (NHTSA) schrieb in ihrer im September 2018 herausgegebenen „Radar Congestion Study“:
Radare nutzen das Wissen über abgestrahlte Signale, um Echos zu identifizieren und die Entfernung und Geschwindigkeit von Objekten in der Umgebung abzuschätzen. Diese Echos sind keine perfekten Kopien des Originalsignals, sondern eine Summe mehrerer Echos, die das Signal konstruktiv und destruktiv stören. Es ist wichtig zu verstehen, dass die Rückstrahlung von Objekten, die vom Radar beleuchtet werden, schwankt, insbesondere wenn sich die relative Entfernung, das Aussehen und andere Objekte in der Szene ändern. Wenn mehrere Radare in unmittelbarer Nähe betrieben werden und eine Umgebung mit mehreren Streuquellen vorhanden ist, verschlechtert sich die Leistung jedes Radars mit steigendem Interferenzpegel.
Das könnte zu einer Beeinträchtigung der Sicherheit führen. „Das schlimmste Szenario wären Todesfälle durch Radarstörungen. Es gibt bereits heute einen verstärkten Einsatz der Filterung gegen False Positives im Radar-Stack, unabhängig von der Grundursache“, bemerkte der Gründer und Präsident von VSI Labs, Phil Magney.
Die Branche wurde gewarnt
Je mehr mit Radar ausgestattete Autos auf die Straße kommen, desto schneller muss jedes Radar lernen, mit der Anwesenheit anderer Radare umzugehen. Radaranbieter stehen unter Druck.
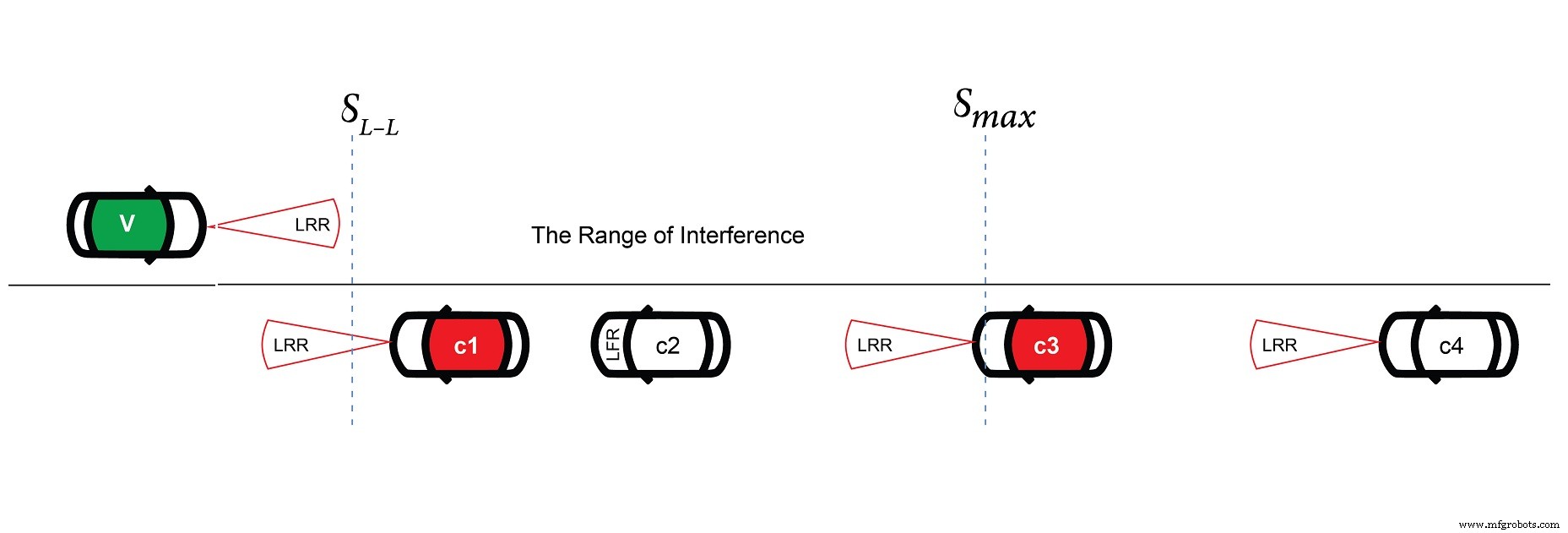
Das einfache allgemeine Verkehrsszenario, bei dem die Störung am Opferradar (grün) berechnet und von den anderen Fahrzeugen (rot) erzeugt wird3. (Quelle:NXP)
Radarstörungen sind kaum eine unerwartete Folge der Radarverbreitung. Die Automobilindustrie war gewarnt worden. Vor mehr als einem Jahrzehnt hat Europa ein Projekt namens MOSARIM (MOre Safety for All by Radar Interference Mitigation) ins Leben gerufen und 2012 einen Bericht veröffentlicht. Das Projekt untersuchte „gegenseitige Radarinterferenzen und die Definition und Ausarbeitung wirksamer Gegenmaßnahmen und Mitigationstechniken. ”
Vor kurzem führte die NHTSA eine „Radar Congestion Study“ durch, bei der Radarinterferenzen mit zwei Fragen im Hinterkopf modelliert und simuliert wurden:
- Wie viel Leistung empfängt ein bestimmtes Radar von anderen Radarsendern?
- Wie wirkt sich dies auf die Leistung eines Kollisionswarnsystems aus?
Der Bericht schloss:
…Systeme, die in Umgebungen mit wenigen anderen Radargeräten gut funktionieren, können in Umgebungen mit Radarüberlastung unter erheblichen Leistungseinbußen leiden. Die Ergebnisse der Studie zeigen, dass die Interferenzpegel aufgrund des Betriebs aktueller Systeme in überlasteten Umgebungen erheblich sein werden. In Szenarien mit vielen Fahrzeugen, die Radare im 76-81-GHz-Band betreiben, wird die Leistung anderer Radare wahrscheinlich die Leistung der Echos von Zielen, die für die angegebene Leistung erforderlich sind, um mehrere Größenordnungen übersteigen.
Zusammenarbeit zwischen Radargeräten?
Die Branche weiß also seit einem Jahrzehnt um die drohenden Radarstaus. Welche Maßnahmen wurden ergriffen?
Bei all dieser Vorlaufzeit können Sie erwarten, dass Auto-OEMs und Tier-1-Unternehmen eine robuste Strategie entwickeln, um Störungen zu vermeiden. Sie können sich einen Radarsensor vorstellen, der Interferenzen vermeidet, indem er die Wellenformparameter dynamisch anpasst.
Dies ist keine Raketenwissenschaft. Die Radargemeinschaft verfügt über das Know-how, um ähnliche Arten von Kanalzugangsregeln auszuleihen, die bereits von der Telekommunikationsindustrie eingesetzt werden (wie bei TDMA, FDMA und CDMA). Ein solches „Listen-before-Talk“-Schema sollte eine strukturiertere Kommunikation zwischen Radargeräten ermöglichen, sagte Gu von NXP.
Leider ist dies nicht die von der Industrie übernommene Eindämmung von Störungen. Abgesehen von der Tatsache, dass Autoradare das gleiche zugewiesene Frequenzspektrum verwenden (76 GHz bis 81 GHz), unterliegt die Radargemeinschaft keinen Vorschriften. „Radarwellenformparameter werden nicht reguliert“, bemerkte Gu.
Branchenvereinbarungen, Standardisierung und Regulierung waren nie Teil der DNA der Autoindustrie.
Ein heute üblicher Ansatz ist laut Gu, „die Interferenzen zu begrenzen, indem die übertragenen Signale entweder zeitlich oder frequenzmäßig randomisiert werden“. Gu erkannte die Unlogik hinter dieser Randomisierung an und sagte:„Heute tun Sie dies blind. Dies ist sicherlich in Ordnung, besonders wenn nicht so viele Autos mit Radar auf den Straßen unterwegs sind. Wenn Sie jedoch die Robustheit des Radarsensors gegenüber Störungen verbessern möchten, müssen Sie die Zusammenarbeit zwischen den Radarsensoren suchen.“
Aber das würde eine Regulierung erfordern.
Nichtsdestotrotz kam NXP in seinem eigenen Whitepaper über Radarinterferenzen zu dem Schluss:
Um eine hohe Marktdurchdringung zu unterstützen, wird eine Vereinbarung zwischen den Herstellern erforderlich sein, um die Sensorressourcen auf faire Weise effektiver zu verteilen. Dieser letzte Schritt bedeutet, dass alle Akteure auf dem Markt zusammensitzen müssen, um einen standardisierten Zugang zum Kanal zu definieren und gleichzeitig die Möglichkeit einer differenzierenden Erfassungsleistung aufrechtzuerhalten.
Kostenlos für alle
Radar war schon immer „kostenlos für alle“, bemerkte Egil Juliussen, ein unabhängiger erfahrener Analyst der Automobilindustrie. Auf der Suche nach Innovationen neigen Radarsensorunternehmen normalerweise dazu, neue, proprietäre Algorithmen zu entwickeln, die auf DSPs oder MCUs laufen, die mit Sensorchips verbunden sind, damit ihr Radar die Bildauflösung verbessern und Interferenzen abschwächen kann, erklärte er.
Mit anderen Worten, für viele in der Automobilindustrie ist eine stärkere Signalverarbeitung bei den Radarinterferenzproblemen ein bevorzugterer Ansatz als alle Branchenvereinbarungen oder -vorschriften.
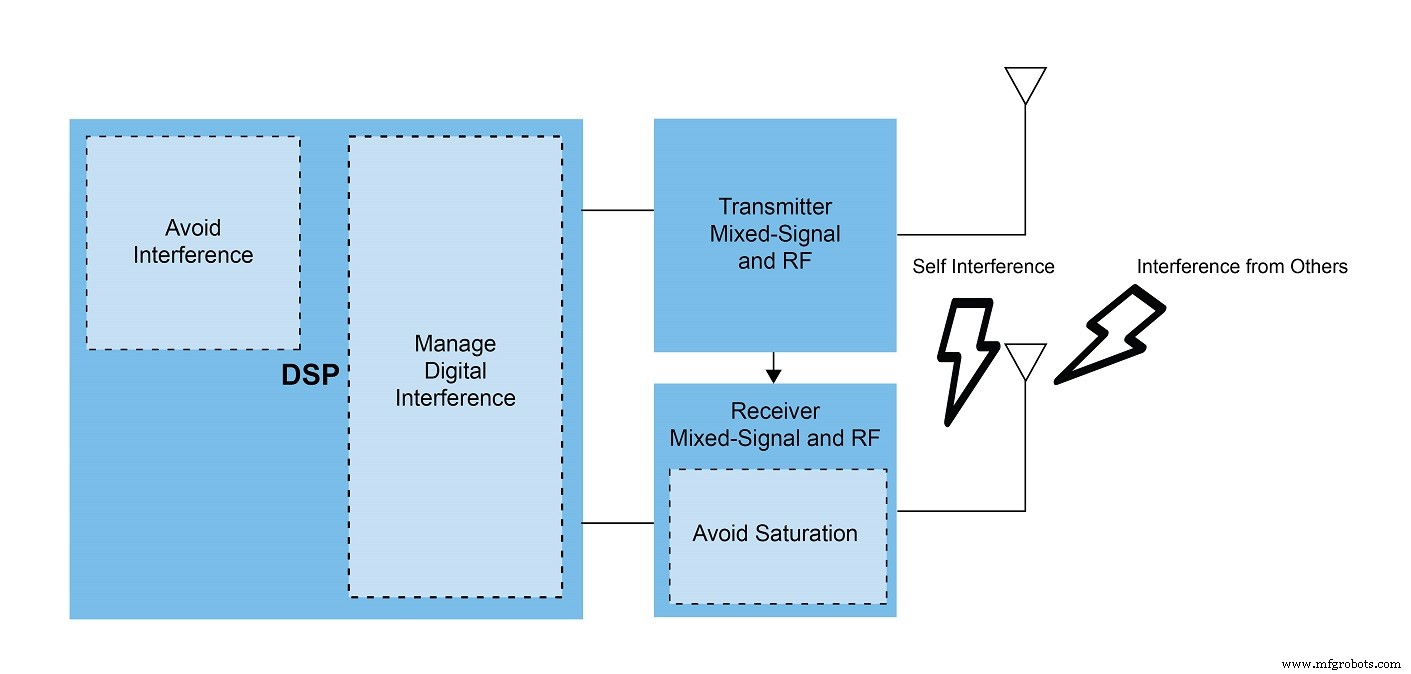
Ein Radarsensor mit einem digitalen Teil (DSP), dem Sender- und Empfänger-Frontend. Interferenztechniken können in solche gruppiert werden, die eine Sättigung des Front-Ends vermeiden, solche, die die Interferenz digital verwalten, und solche, die versuchen, Interferenzen zu vermeiden, bevor sie tatsächlich auftreten. (Quelle:NXP)
Während unseres Interviews stellte Gu von NXP drei verschiedene Ansätze zur Minderung von Radarinterferenzen vor:1) Vermeiden Sie eine Sättigung am Front-End; 2) digitale Interferenz handhaben durch Erkennen und Entfernen von Interferenzen in der digitalen Domäne; 3) Vermeiden Sie Interferenzen, indem Sie die Wellenformparameter dynamisch anpassen.
Der dritte Ansatz wird bereits im aktuellen 77-GHz-Spektrum als am wenigsten wahrscheinlich eingeschätzt. Gu erklärte:„Die Leute denken, es ist zu spät, weil wir bereits zu viele Radarsensoren auf der Straße haben und diese Sensoren nicht zusammenarbeiten würden.“ Er fügte hinzu, dass das Schema „in Zukunft auf die 140-GHz-Frequenz angewendet werden könnte, wenn dieses Band für Radar verfügbar gemacht wird“.
Der erste – wahrscheinlicher – Ansatz besteht darin, Techniken zu entwickeln, die eine Sättigung des Frontends vermeiden. Hier kann zumindest ein Teil des Nutzsignals empfangen und entsprechende Gegenmaßnahmen ergriffen werden. „Sie können dies tun, indem Sie den Radarempfänger mit zwei verschiedenen Verstärkungseinstellungen versehen“, sagte Gu. Alternativ könnte das System eine "räumliche Nullung" beinhalten, bei der das Front-End mehrere Antennen verwendet, um sich selbst in die Richtung zu blenden, die Interferenzen erzeugt. Dieser Ansatz versucht, ein störendes Signal zu eliminieren, bevor es das Front-End sättigt, erklärt Gu.
Anbieter von Radarchips wie NXP konzentrieren sich tendenziell auf den Umgang mit Störungen im digitalen Bereich – im DSP. „Voraussetzung ist natürlich, dass das Nutzsignal tatsächlich nicht von den starken Signalen verdeckt wird“, sagt Gu.
Nachdem festgestellt wurde, dass das Störsignal relativ schwach ist, kann es zusammen mit dem Nutzsignal digitalisiert werden, ohne dass das Front-End gesättigt wird.
Aber der Name des Spiels ist zunächst zu erkennen, ob das Signal beschädigt wurde, was laut NXP leichter gesagt als getan ist. Die hierfür erforderlichen Techniken hängen von der spezifischen Radarwellenform sowohl des Opferradars als auch der Störung ab. Da der heutige Regulierungsrahmen verschiedene Arten der Erstellung von Radarwellenformen zulässt, wählt jeder Hersteller von Radarsensoren seine eigenen, was den Prozess nicht nur vielfältig, sondern auch knifflig macht.
Der De-facto-Standard im Automobilradar ist das frequenzmodulierte Dauerstrichradar (FMCW). FMCW bietet eine sehr gute Leistung, die relativ einfach und elegant ist. Es deckt eine große Bandbreite mit einem ADC mit niedriger Bandbreite ab und bietet laut NXP eine robuste Schätzung der Zielgeschwindigkeit. Aber es kommt mit einigen Vorbehalten.
Verschiedene Hersteller verwenden unterschiedliche Parametereinstellungen von FMCW-Wellenformen, um ihr Produktangebot zu differenzieren und unterschiedliche Anwendungsanforderungen abzudecken, wie z /P>
Zur Erinnerung:Der Radarsensor muss erst erkennen, ob ein Störer vorhanden ist. Die Erkennung von Interferenzen funktioniert durch das Erkennen einzigartiger Eigenschaften des fremden Signals. Sobald die Interferenz erkannt wurde, müssen Systemalgorithmen sie so vollständig wie möglich aus dem empfangenen Signal entfernen, ohne das gewünschte Signal zu verfälschen oder zu entfernen.
All dies sollte niemanden in der Radar-Community überraschen. „Es gibt Lehrbuchalgorithmen für die Signalverarbeitung auf dem Markt, und sie werden bereits von der Industrie verwendet“, sagte Gu.
Lehrbuchalgorithmen haben jedoch Grenzen, bemerkte er. „Sie beschränken sich oft auf den Umgang mit gering korrelierten Interferenzen. Und sie sind auch in der Lage, nur eine sehr begrenzte Anzahl von Störungen zu bewältigen – eine oder zwei gleichzeitig.“
Das Ziel von NXP ist es, seine differenzierten fortschrittlichen digitalen Signalalgorithmen zur Beseitigung von Störungen weiterzuentwickeln.
ST arbeitet an einer eigenen Methodik. Duncan sagte:„Wenn Sie wissen, was das Radar-Chirp sein soll, können Sie Störsignale leicht filtern/ignorieren. Es ist auch möglich, Signaturen zwischen Chirps einzufügen.“
Duncan fügte jedoch hinzu:„Wenn es mehr Standardisierung/Weitergabe der Übertragung gäbe, würde dies bei den Gegenmaßnahmen helfen, unerwünschte Signale zu entfernen.“
Fühlen Sie Radarstörungen?
Die NHTSA hat einige Szenarien entwickelt, in denen Interferenzen simuliert werden, die bei Radarüberlastung zu erwarten sind.
- Im Fall von Verkehr auf einer zweispurigen Autobahn, unter der Annahme, dass die Radare zufällig ausgewählte Trägerfrequenzen verwenden, sagte die NHTSA voraus, dass „ein Automobilradar eine viel stärkere Leistung von anderen Radargeräten empfangen würde als die Echos seiner eigenen Übertragungen, die zum Verfolgen erforderlich sind andere Fahrzeuge. Die Interferenz nähert sich vier Größenordnungen oder fast 40 dB mehr als Echos, die für ein Referenzziel typisch sind, wie für das System spezifiziert.“
- Bei Radaren, die nach hinten gerichtet sind (wie bei Systemen zur Erkennung des toten Winkels), "sind diese Einheiten anfällig für das direkte Eintreffen von Radaren zur Kollisionsvermeidung nach vorne, die eine höhere Leistung und Antennenverstärkung verwenden." In der Studie heißt es:„Unsere Analyse zeigt, dass diese Einheiten eine Störleistung von einem Vorwärts-Kollisionsvermeidungsradar erfahren könnten, die fast fünf Größenordnungen oder 50 dB höher ist als die Reflexionen von ihrem angegebenen Referenzziel.“
Bisher war der Einfluss von Radar auf realen Straßen jedoch nicht zu spüren.
„Radar-zu-Radar-Störungen sind noch unbekannt und als angewandte Forscher, die fast täglich mit Radar arbeiten, kann VSI nicht sagen, dass wir jemals bei Tests auf öffentlichen Straßen Radar-zu-Radar-Störungen von einem anderen Fahrzeug erlebt haben“, sagte Magney . von VSI Labs . „Wir können davon ausgehen, dass wir exponiert sind, weil heute so viele Fahrzeuge auf den Straßen eine Mischung aus Radargeräten für kurze bis lange Entfernungen haben“, fügte er hinzu.
Während des Finanzgesprächs von Tesla im ersten Quartal am Montag wiederholte CEO Elon Musk Pläne, Radare aus Tesla-Fahrzeugen zu eliminieren, wodurch das Problem der Radarstörungen strittig wurde – zumindest für Tesla-Fahrzeuge.
Andere Auto-OEMs, Tier 1s und Automobiltechnologie-Zulieferer werden das Radar jedoch in absehbarer Zeit nicht aufgeben.
Insbesondere Radare seien kritisch, weil sie wetterfest seien, betonte Magney von VSI. „Radar ist einer der kostengünstigsten ADAS-Sensoren und die Verbreitung wird in den kommenden Jahren dramatisch zunehmen.“
>> Dieser Artikel wurde ursprünglich auf unserer Schwesterseite EE veröffentlicht Zeiten.
Verwandte Inhalte:
- ADAS-Experten erwägen Sensorintegration in zukünftige Fahrzeuge
- ADAS-Fahrzeuge schneiden bei der Fußgängersicherheit schlecht ab
- Die Zukunft der automatisierten Fahrzeuge steht vor unbeantworteten Sensorfragen
- Verbesserung der Straßenerkennung über die visuelle Ebene hinaus mit intelligenter Datenverarbeitung
- 60-GHz-Radar-on-Chip unterstützt die Anforderungen der Automobilindustrie
- Automobile mmWave-Sensoren ermöglichen intelligenteres Radar
Für mehr Embedded, abonnieren Sie den wöchentlichen E-Mail-Newsletter von Embedded.
Sensor
- Stromsignalsysteme
- Verkehrssignal
- Was ist ein Radarsensor:Funktionsweise und Anwendungen
- Verbesserte aktive Geräuschunterdrückung mit neuen Automobil-Audiotechnologien
- Debüts des bildgebenden Radarprozessors für die Automobilindustrie mit 30 fps
- Wird digitales Radar die neuen Herausforderungen bei ADAS-Interferenzen lösen?
- Modifiziertes PBT bietet mehr Klarheit für Kfz-Radarsensoren
- Sicherheitsvorrichtungen für Ankerwinden
- Signalintegrität &PCB
- Atombasierte Funkkommunikation