


Mit KI erlangen robotische Exoskelette Selbstkontrolle
Robotikforscher entwickeln Exoskelettbeine, die ihre Schritte selbstständig machen, indem sie hochentwickelte Technologien der künstlichen Intelligenz (KI) verwenden. Die selbstgesteuerten Beine können eines Tages die Bewegungen von älteren Menschen und Menschen mit körperlichen Behinderungen unterstützen.
Das System, das von Forschern der University of Waterloo gebaut und getestet wurde, kombiniert Computer Vision und Deep-Learning-KI. um einen menschenähnlichen Gang nachzuahmen. Das System „lernt“ aus einer Sammlung von Beispielspaziergängen in einer Umgebung und passt seine Bewegungen basierend auf der Umgebung an, die es wahrnimmt.
„Wir geben Roboter-Exoskeletten Vision, damit sie sich selbst steuern können“, sagte Brokoslaw Laschowski , ein Doktorand in Systems Design Engineering, der ein Forschungsprojekt der University of Waterloo namens ExoNet leitet .
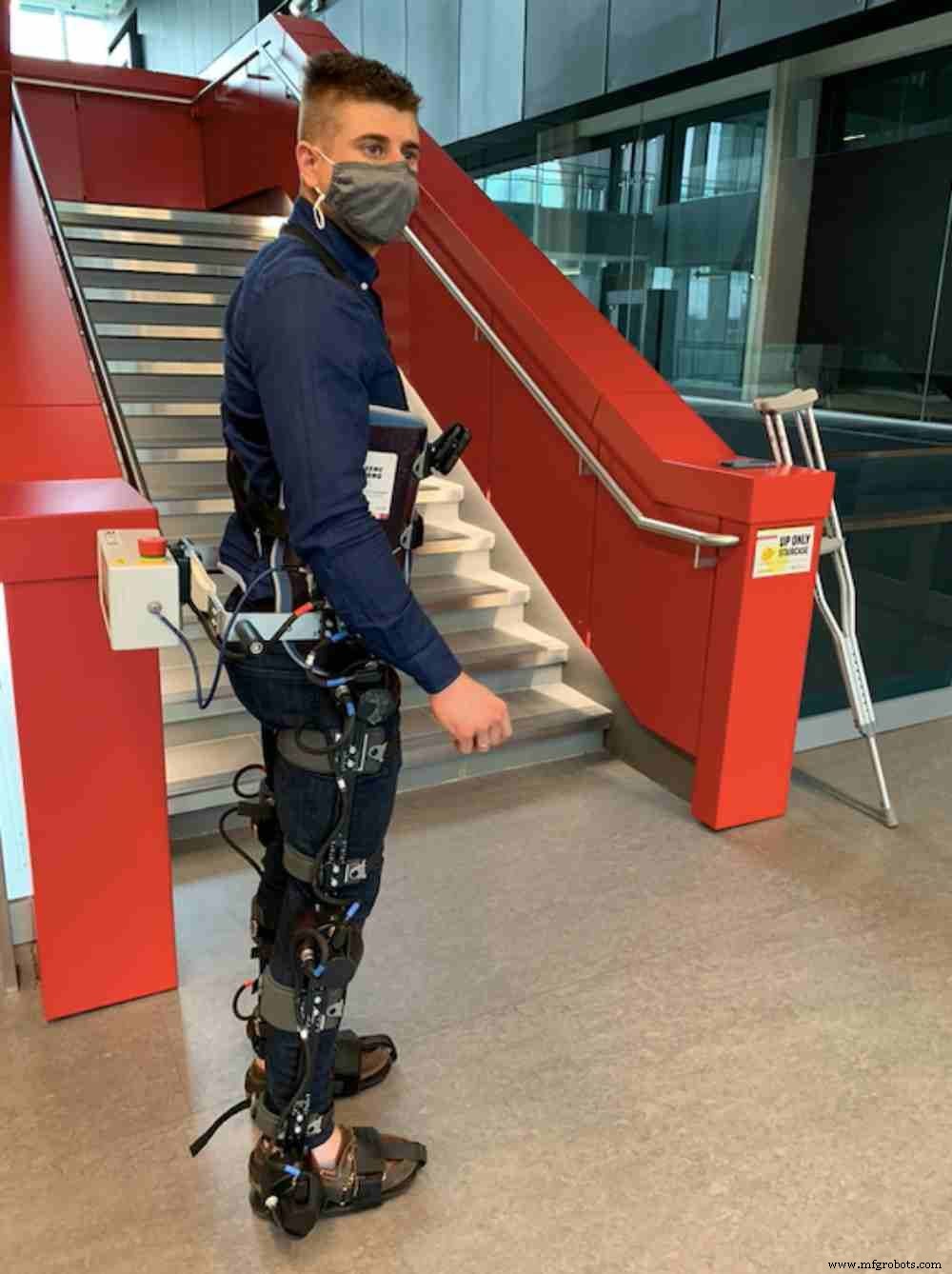
Das von künstlicher Intelligenz unterstützte ExoNet-System greift auf vom Team gesammelte Trainingsdaten zurück. Mit tragbaren Kameras an der Brust (wie im obigen Bild gezeigt) nahmen Laschowski und seine Forscherkollegen Videos von Innen- und Außenumgebungen auf.
KI Computersoftware verarbeitete dann den Video-Feed, um Treppen, Türen und andere Merkmale in der Umgebung genau zu erkennen.
Die Leistung wurde in der Zeitschrift Frontiers in Robotics and AI ausführlich beschrieben . (Untersuchen Sie einen Forschungsdatensatz im Zusammenhang mit diesem autonomen Exoskelett-Projekt.)
Das neueste in einer Reihe von Papieren zu den verwandten Projekten, Simulation of Stand-to-Sit Biomechanics for Robotic Exoskeletons and Prostheses with Energy Regeneration , erscheint in der Zeitschrift IEEE Transactions on Medical Robotics and Bionics.
Motorbetriebene Exoskelettbeine wurden schon früher entworfen, aber der Träger benötigte fast immer einen Joystick oder eine Smartphone-Anwendung, um seine Bewegungen zu steuern.
Mehr Roboter in Tech Briefs
Ein Roboter, der an der Universität Tel Aviv entwickelt wird, „hört“ elektrische Signale dank eines natürlichen Sensors:dem Ohr einer toten Heuschrecke.
Ein neuer Roboter braucht keine Elektronik, um sich zu bewegen – nur eine konstante Druckluftquelle.
„Das kann unbequem und kognitiv fordernd sein“, sagt Laschowski. „Jedes Mal, wenn Sie eine neue Bewegungsaktivität ausführen möchten, müssen Sie anhalten, Ihr Smartphone zücken und den gewünschten Modus auswählen.“
Der Ansatz der University of Waterloo bietet dank der K.I. eine stärker automatisierte Steuerung. und Computer-Vision-Fähigkeiten.
In der nächsten Phase des ExoNet-Forschungsprojekts werden Anweisungen an Motoren gesendet, damit Roboter-Exoskelette Treppen steigen, Hindernissen ausweichen oder andere geeignete Maßnahmen ergreifen können, basierend auf der Analyse der aktuellen Bewegung des Benutzers und des bevorstehenden Geländes.
Darüber hinaus arbeiten die Forscher auch daran, die Energieeffizienz von Motoren für Roboter-Exoskelette zu verbessern, indem sie die menschliche Bewegung nutzen, um die Batterien selbst aufzuladen.
„Unser Kontrollansatz würde nicht unbedingt menschliches Denken erfordern“, sagte Laschowski, der von Ingenieurprofessor John McPhee betreut wird , dem kanadischen Forschungslehrstuhl für Biomechatronische Systemdynamik, in seiner Bewegungsforschungsgruppe Labor. „Ähnlich wie autonome Autos, die selbst fahren, entwerfen wir autonome Exoskelette, die für sich selbst gehen.“
In einem Q&A mit Tech Briefs unten erklärt Brokoslaw Laschowski mehr über die ExoNet-Technologie und warum ein Exoskelett, das ähnliche Eigenschaften wie ein selbstfahrendes Auto hat, auch fahrzeugähnliche Sicherheitsmaßnahmen beinhalten muss.
Technische Informationen : Wie gewährleisten Sie die Sicherheit? Kann der Benutzer die Kontrolle übernehmen, wenn das Exoskelett versehentlich etwas Gefährliches tut? Die Analogie lautet ADAS vs. vollständig autonome Fahrzeuge. Wie würde der Benutzer die Geschwindigkeit und das Stoppen und Gehen steuern? Wie würden solche Steuerelemente mit dem Benutzer kommunizieren?
Brokoslaw Laschowski :Sicherheit ist das Wichtigste. Diese Robotergeräte wurden entwickelt, um älteren Menschen und Menschen mit körperlichen Behinderungen (z. B. Schlaganfall, Rückenmarksverletzung, Zerebralparese, Osteoarthritis usw.) zu helfen. Wir können es uns nicht leisten, dass das Exoskelett falsche Entscheidungen trifft und möglicherweise Stürze oder Verletzungen verursacht. Folglich konzentrieren wir uns ausschließlich auf die Verbesserung der Klassifizierungsgenauigkeit und -kontrolle, indem wir ein Umgebungserkennungssystem entwickeln, das es dem Exoskelett ermöglicht, die Gehumgebung autonom zu erfassen und in Echtzeit darauf zu reagieren. Wir optimieren die Systemleistung mithilfe von Computern und tragbaren Prototypen mit „gesunden“ Bedienelementen vor klinischen Tests. Der Benutzer des Exoskeletts hat jedoch immer die Möglichkeit, die manuelle Steuerung (z. B. Anhalten und Lenken) zu übernehmen.
Technische Informationen :Können Sie mir eine Anwendung vorstellen, die Sie sich für diese Art von Exoskelett vorstellen? Wo wird dies am wertvollsten sein?
Brokoslaw Laschowski :Diese Robotergeräte wurden entwickelt, um ältere Menschen und Menschen mit körperlichen Behinderungen bei Bewegungsaktivitäten zu unterstützen. Eine beispielhafte Anwendung unseres umgebungsadaptiven automatisierten Steuerungssystems ist das Umschalten zwischen verschiedenen Bewegungsaktivitäten. Bei im Handel erhältlichen Exoskeletten nähert sich der Benutzer beispielsweise beim Übergang vom Gehen auf ebenem Boden zum Treppensteigen der Treppe, hält an und teilt dem Exoskelett die beabsichtigte Aktivität manuell mit, indem er eine mobile Schnittstelle, Drucktasten oder andere Handsteuerungen verwendet (je nach Gerät).
Im Gegensatz dazu erfassen und klassifizieren bei einem autonomen Steuersystem, wenn sich der Benutzer einer geneigten Treppe nähert, Onboard-Sensoren wie Trägheitsmesseinheiten (IMUs) kontinuierlich die aktuellen Bewegungen des Benutzers, und das tragbare Kamerasystem erfasst und klassifiziert das bevorstehende Gelände. Die Verschmelzung dieser verschiedenen Sensortechnologien und Mustererkennungsalgorithmen wird verwendet, um die Bewegungsabsicht des Benutzers vorherzusagen und das Exoskelett zu steuern.
Technische Informationen :Wie wird das Exoskelett „trainiert“, um ohne menschliches Denken zu funktionieren?
Brokoslaw Laschowski :Wir verwenden Computer Vision und Deep Learning für die Umgebungsklassifikation. Anhand von Millionen von Bildern aus der realen Welt werden unsere konvolutionellen neuronalen Netze automatisch und effizient darauf trainiert, die verschiedenen Gehumgebungen vorherzusagen, die in den Bildern gezeigt werden. Diese Informationen über die Gehumgebung werden anschließend verwendet, um das Roboter-Exoskelett in Bezug auf eine optimale Wegplanung, Vermeidung von Hindernissen und das Umschalten zwischen verschiedenen Bewegungsaktivitäten (z. B. Gehen auf ebenem Boden zu Treppensteigen) zu steuern.
Technische Informationen :Wie geht es mit diesem Exoskelett weiter? Woran arbeitest du gerade?
Brokoslaw Laschowski :Aus sicherheitskritischer Sicht müssen diese KI-gestützten Exoskelett-Steuerungssysteme genau und in Echtzeit funktionieren. Daher konzentrieren wir uns darauf, die Genauigkeit der Umgebungsklassifizierung zu verbessern und gleichzeitig neuronale Netzwerkarchitekturen mit minimalen Rechen- und Speicheranforderungen zu verwenden, um Onboard-Inferenz in Echtzeit zu fördern.
Was denken Sie? Teilen Sie Ihre Fragen und Kommentare.
Sensor
- Übernehmen Sie die Kontrolle über Ihre Produktion mit effektiver Kapazitätsplanung
- Zutrittskontrolle mit QR, RFID und Temperaturüberprüfung
- Verbesserung der Qualitätskontrolle mit dem Deming-Zyklus
- Bessere Qualitätskontrolle mit 3D-gedruckten Teilen
- Steuerung von Robotertransfersystemen mit Laser-Distanzsensoren
- Münzprüfer mit Arduino steuern
- Automatisierung der Qualitätskontrolle mit Hilfe von Technologie
- Drehmaschine mit CNC
- Messmethode testet Passform von Exoskeletten
- Roboter-Exoskelett für den Oberkörper