


Kommunikationsprotokolle:Überprüfung der Optionen für Encoder-Anwendungen
In diesem Artikel werden die Verwendung eines Encoders zur Gewährleistung einer genauen fortlaufenden Verfolgung der Rotorwelle eines Motors und die Schlüsselfaktoren, die bei der Auswahl des Encoders hilfreich sind, erörtert. basierend auf verschiedenen Parametern.
Der zunehmende Einsatz von Motoren in Robotik, Industrieantrieben, Fabrikautomationssystemen, erneuerbaren Energieerzeugungsanlagen usw., kombiniert mit einem wachsenden Bedarf an energieeffizienterem Betrieb, hat in den letzten Jahren zu einem starken Anstieg der Verwendung von Drehgebern geführt. Im jüngsten Bericht von Insight Partners zu diesem Thema prognostiziert das Analystenhaus, dass der Gesamtmarkt für Drehgeber bis 2027 eine durchschnittliche jährliche Wachstumsrate (CAGR) von 10,2 % seiner weltweiten Umsatzzahlen aufweisen wird. Folglich wird erwartet, dass dieser Markt am Ende dieses Zeitraums einen Wert von 3,45 Milliarden US-Dollar pro Jahr haben.
Um den Betriebswirkungsgrad eines Motors zu maximieren, ist eine genaue fortlaufende Verfolgung seiner Rotorwelle erforderlich. Dadurch können konstante Daten über die Position des Rotors sowie die Geschwindigkeit und Richtung seiner Bewegung erfasst werden. Solche Funktionen können durch die Einbeziehung irgendeiner Form eines Codierers in das Systemdesign erreicht werden. Bevor Sie sich jedoch für die Art des zu spezifizierenden Encoders entscheiden, müssen Sie die Schlüsselfaktoren verstehen, die diese Entscheidung bei einer Reihe von Anwendungen oder logistischen Anforderungen beeinflussen.
Absolut oder inkrementell?
Bei der Auswahl eines Encoders stehen mehrere mögliche Optionen zur Verfügung. Ein Inkrementaltyp hilft bei der Bestimmung der Position relativ zu einem Referenzpunkt, während ein Absolutwertgeber jeder möglichen Rotorposition einen eindeutigen Code zuweist (Abbildung 1).
Obwohl Inkremental-Encoder billiger und einfach zu implementieren sind, sind mit Absolut-Encodern klare Betriebsvorteile verbunden. Der bemerkenswerteste Vorteil der Verwendung von Absolutwertgebern ist die Tatsache, dass sie sofort reagieren (da sie nur den spezifischen Code identifizieren müssen). Durch deren Einsatz kann die Rotorposition bestimmt werden, sobald das System aktiviert wird. Dies ist besonders in sicherheitskritischen Anwendungsszenarien von Vorteil.
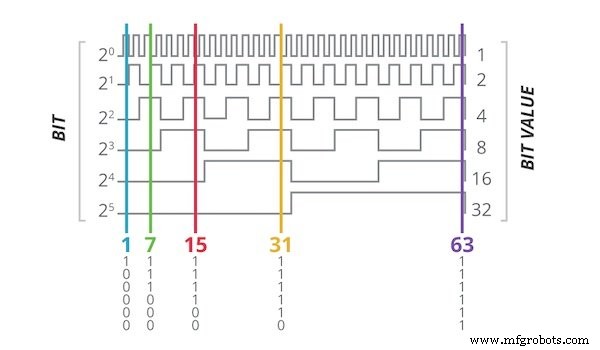
Abbildung 1. Jede potenzielle Rotorposition eines Absolutwertgebers hat einen eindeutigen Code
Welcher Encodertyp sollte verwendet werden?
Es gibt auch mehrere verschiedene Wege, über die der Codierungsmechanismus implementiert werden kann. Oft wird eine optische Abtastung verwendet. Dies hat jedoch einige Nachteile, insbesondere in rauen Industrieumgebungen - da Schmutz, Fett oder Öl Teile der Encoderscheibe verdecken können, wodurch es für den zugehörigen Fotosensor schwierig wird, korrekte Ergebnisse zu erzielen. Auch eine dauerhafte Belastung durch Stöße oder Vibrationen kann dazu führen, dass die Festplatte beschädigt wird und ausgetauscht werden muss. Außerdem ist eine genaue Ausrichtung erforderlich, die ein iterativer und zeitaufwändiger Prozess sein kann.
Obwohl magnetische Encoder das Problem der Sichtlinie beseitigen, das optische Encoder beeinträchtigt, haben diese ihre eigenen Nachteile. Sie sind relativ stromhungrig und können keine hohen Auflösungen unterstützen. Aus diesen Gründen erfreuen sich kapazitive Absolut-Encoder, wie sie in der AMT-Serie von CUI Devices sind, mittlerweile großer Beliebtheit. Diese kapazitiven Encoder sind unempfindlich gegenüber Staub, Schmutz und Fett.
Daneben weisen sie eine hohe Widerstandsfähigkeit gegenüber Vibrationen und extremen Temperaturen auf. Sie bieten dauerhafte Zuverlässigkeit mit einer langen und störungsfreien Lebensdauer – da sie im Gegensatz zu optischen Encodern weniger anfällig für mechanischen Verschleiß sind. Gleichzeitig bieten sie eine weitaus höhere Genauigkeit als ihre magnetischen Äquivalente (Abbildung 2).
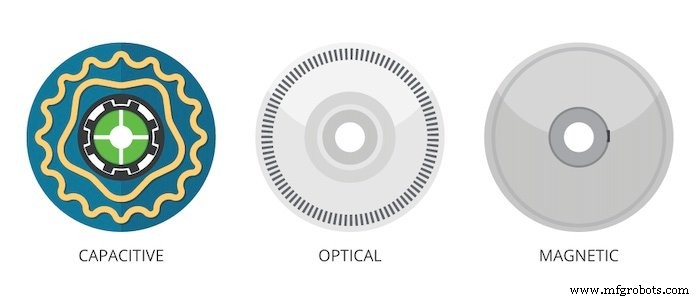
Abbildung 2. Ein Vergleich der Encoderscheiben für kapazitive, optische und magnetische Encoder
Integrieren eines Encoders
Nachdem man sich für den Codierermechanismus entschieden hat, ist das nächste Element, das angesprochen werden muss, die Schnittstelle des Codierers mit dem Hostsystem. Es gibt eine Vielzahl von Schnittstellenprotokollen, die verwendet werden können. Daher ist es wichtig, die Unterschiede zwischen ihnen zu verstehen, um die am besten geeignete Option auszuwählen.
Serielle Schnittstellen werden häufig für die Kommunikation in industriellen Systemen verwendet. RS-485, Serial Peripheral Interface (SPI) und Synchron Serial Interface (SSI) gehören zu den bekanntesten dieser Protokolle.
SPI bietet eine bidirektionale Schnittstelle, die den Vollduplex-Betrieb unterstützt. Da es viele Host-Mikrocontroller-Einheiten (MCUs) gibt, die einen SPI-Port direkt integriert haben, ist dies eine bequeme Möglichkeit, ein Encoder-System mit minimalem Zeit- und Arbeitsaufwand zu implementieren. Erhöhte Datenraten können unterstützt werden, und es ist auch einfach, diese Rate anzupassen.
Die Verwendung von SPI ist optimal, wenn die beteiligten Verbindungsentfernungen relativ kurz sind (idealerweise unter einem Meter). Längere Entfernungen können berücksichtigt werden, jedoch ist es erforderlich, die Datenrate zu reduzieren, um eine akzeptable Rauschimmunität aufrechtzuerhalten. Die AMT22-Serie von CUI Devices ist ein solcher SPI-Encoder mit einer maximalen Taktfrequenz von 2 MHz. Auf Anfrage kann der Encoder innerhalb von 1500 ns eine extrem schnelle Positionsrückmeldung an den Host-Mikrocontroller liefern. Über die SPI-Verbindung können auch erweiterte Befehle verwendet werden, um den Nullpunkt zu setzen oder den Encoder zurückzusetzen.
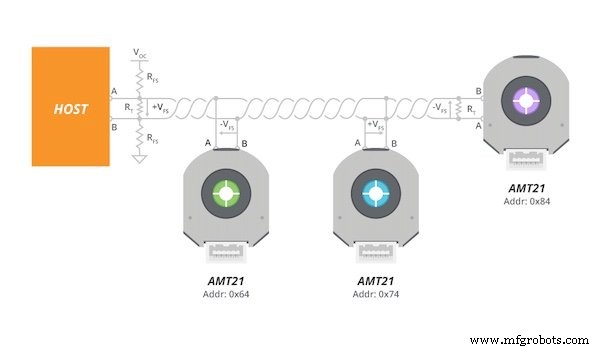
Abbildung 3. Beispiel-SPI-Konfiguration mit gemeinsamem Taktsignal, MOSI und MISO und einzigartiger Chipauswahlleitung
RS-485 ist besser geeignet für längere Verbindungsentfernungen als SPI oder für den Einsatz in Situationen, in denen erhebliches elektrisches Rauschen vorhanden ist. RS-485 ist eine weitere Option. Da es sich um ein asynchrones Schnittstellenprotokoll handelt, benötigt es kein Taktsignal. Seine differentielle Signalisierung ermöglicht eine Gleichtakt-Rauschunterdrückung und die angebotene starke Rauschimmunität ermöglicht den Einsatz in extrem schwierigen Umgebungen, in denen elektromagnetische Störungen (EMI) vorherrschen.
Im Gegensatz zu SPI ist es nicht erforderlich, die Datenrate zu drosseln, wenn die Entfernung erweitert wird. Mit einem dedizierten RS-485-Transceiver kann die Kommunikationsgeschwindigkeit 10 Mbit/s oder mehr erreichen, abhängig von der Entfernung, die die Daten über ein Twisted-Pair-Kabel zurücklegen müssen. Das Kabel wird dann an jedem Ende mit einem Widerstand gleich dem Wellenwiderstand abgeschlossen.
Ein weiterer großer Vorteil von RS-485 besteht darin, dass mehrere Encoder an einen Bus angeschlossen werden können (Abbildung 4). Für Implementierungen auf Basis der RS-485-Technologie bietet der Encoder AMT21 eine Lösung. Sein Standardprotokoll von acht Datenbits, keiner Parität und einem Stoppbit funktioniert, indem die beiden unteren Bits den Encoderbefehl definieren, während die anderen 6 Bits als Encoderadresse verwendet werden. Dies bedeutet, dass sich bis zu 64 Encoder denselben Bus teilen können – was Vorteile bei komplexen, groß angelegten Implementierungen bietet. AMT21-Encoder können auch innerhalb von 3 µs auf Positionierungsanfragen vom Host antworten.
Abbildung 4. Ein Beispiel für eine RS-485-Konfiguration mit mehreren an den Host angeschlossenen Encodern
Über SSI transportierte Daten werden von Sender und Empfänger synchronisiert, die beide auf ein gemeinsames Taktsignal verweisen. Dieses unidirektionale Simplex-Kommunikationsprotokoll basiert auf differentieller Signalisierung und stellt eine sehr kostengünstige Schnittstellenlösung dar. Es kann ähnliche Verbindungslängen wie SPI verarbeiten und hat auch vergleichbare Rauschleistungseigenschaften.
Die AMT23-Serie von CUI Devices bietet eine Lösung für Situationen, in denen SSI die gewählte Schnittstelle ist. Die Variante eines Standard-SSI-Protokolls von CUI Devices verfügt über eine dreiadrige SSI-Schnittstelle mit einer Chip-Select-Verbindung, die die Installation rationalisiert und die Schnittstelle zwischen Host und Encodern vereinfacht. Die Chip-Select-Funktion ermöglicht es dem Host, bestimmte individuelle Encoder auf dem Bus zu aktivieren, während der Encoder reagiert, indem er einfach Positionsdaten auf den Bus legt.
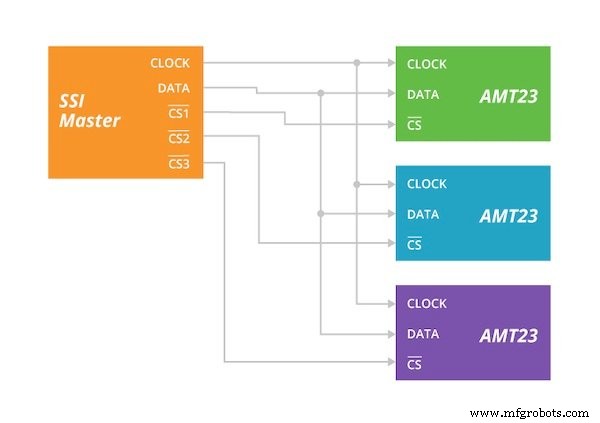
Abbildung 5. Die Dreidraht-SSI-Konfiguration mit Chipauswahlfunktion
Schlussfolgerung
Durch das umfangreiche Portfolio an kapazitiven Absolutwertgebern von CUI Devices und die Palette der von diesen Geräten unterstützten Schnittstellentechnologien können Ingenieure eine Lösung finden, die ihren speziellen Anwendungsanforderungen entspricht. In Situationen, in denen lange Verbindungsentfernungen erforderlich sind oder der Geräuschpegel verringert werden muss, empfiehlt es sich, eine RS-485-Schnittstelle zu verwenden.
Wenn eine unkomplizierte Implementierung Priorität hat, ist ein Encoder mit SPI-Schnittstellenfunktionalität eine gute Option. Dies wird durch die Tatsache unterstützt, dass es von MCUs einer Vielzahl verschiedener Halbleiterhersteller unterstützt wird. Wenn die Systembereitstellung so schlank wie möglich sein muss, die Kosten gering gehalten werden und der Platzbedarf gering ist, ist SSI möglicherweise die richtige Lösung.
Branchenartikel sind eine Inhaltsform, die es Branchenpartnern ermöglicht, nützliche Nachrichten, Nachrichten und Technologien mit All About Circuits-Lesern auf eine Weise zu teilen, für die redaktionelle Inhalte nicht gut geeignet sind. Alle Branchenartikel unterliegen strengen redaktionellen Richtlinien, um den Lesern nützliche Neuigkeiten, technisches Know-how oder Geschichten zu bieten. Die in Branchenartikeln zum Ausdruck gebrachten Standpunkte und Meinungen sind die des Partners und nicht unbedingt die von All About Circuits oder seinen Autoren.
Automatisierungssteuerung System
- Die Vorteile des Einsatzes von Robotic Vision für Automatisierungsanwendungen
- Vor-Ort-Kraftstofftankoptionen für Bauanwendungen
- 6 einfache Tipps zur Encoderreparatur und Fehlerbehebung
- Was sind die verschiedenen Optionen für die Metallveredelung?
- Die besten Fertigungsoptionen für Elektronikgehäuse
- So wählen Sie den richtigen Sensor für Abfüllanwendungen aus
- Die besten hydraulischen Scheibenbremsen für industrielle Anwendungen im Jahr 2020
- Bluetooth-Kommunikationsprotokoll – Der ultimative Protokollleitfaden für Lernende
- Was sind die häufigsten Anwendungen für Wechselstrom?
- Sandgussanwendungen für den Schwermaschinenmarkt