


Kirigami-Robotergreifer sind fein genug, um Eigelb zu heben
Ingenieurforscher der North Carolina State University haben eine neue Art flexibler Robotergreifer demonstriert, die in der Lage sind, empfindliches Eigelb zu heben, ohne es zu zerbrechen, und die präzise genug sind, um ein menschliches Haar zu heben. Die Arbeit hat Anwendungen sowohl für weiche Robotik als auch für biomedizinische Technologien.
Die Arbeit stützt sich auf die Kunst des Kirigami, bei der zweidimensionale (2D) Materialblätter geschnitten und gefaltet werden, um dreidimensionale (3D) Formen zu bilden. Insbesondere haben die Forscher eine neue Technik entwickelt, bei der Kirigami verwendet wird, um 2D-Folien in gekrümmte 3D-Strukturen umzuwandeln, indem parallele Schlitze über einen Großteil des Materials geschnitten werden. Die endgültige Form der 3D-Struktur wird zu einem großen Teil durch die äußere Begrenzung des Materials bestimmt. Beispielsweise würde ein 2D-Material mit einer kreisförmigen Begrenzung eine sphärische 3D-Form bilden.
„Wir haben ein Modell definiert und demonstriert, das es Benutzern ermöglicht, rückwärts zu arbeiten“, sagt Yaoye Hong, Erstautorin eines Artikels über die Arbeit. „Wenn die Benutzer wissen, welche Art von gekrümmter 3D-Struktur sie benötigen, können sie mit unserem Ansatz die Grenzform und das Muster der Schlitze bestimmen, die sie im 2D-Material verwenden müssen. Eine zusätzliche Kontrolle der endgültigen Struktur wird ermöglicht, indem die Richtung gesteuert wird, in die das Material geschoben oder gezogen wird.“
Unsere Technik ist um einiges einfacher als frühere Techniken zum Konvertieren von 2D-Materialien in gekrümmte 3D-Strukturen und ermöglicht es Designern, eine Vielzahl von kundenspezifischen Strukturen aus 2D-Materialien zu erstellen“, sagte Professor Jie Yin.
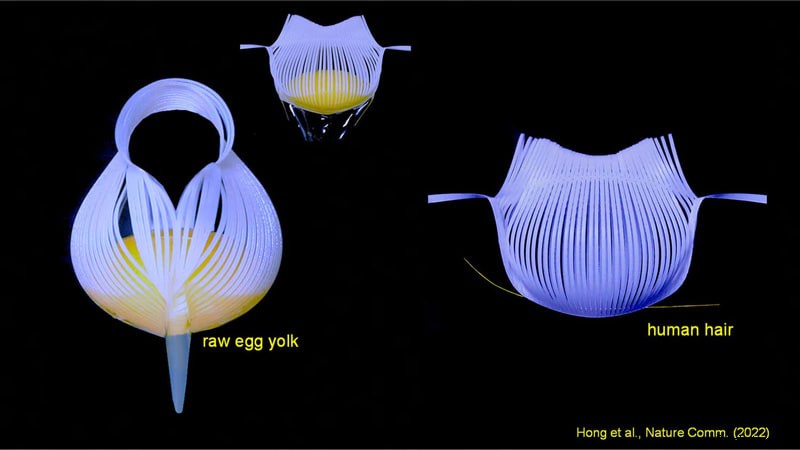
Die Forscher demonstrierten die Nützlichkeit ihrer Technik, indem sie Greifer entwickelten, die in der Lage sind, Objekte zu greifen und anzuheben, die von Eigelb bis zu einem menschlichen Haar reichen.
„Herkömmliche Greifer greifen ein Objekt fest – sie greifen Dinge, indem sie Druck auf sie ausüben“, sagte Yin. „Das kann Probleme bereiten, wenn man versucht, zerbrechliche Gegenstände wie Eigelb zu greifen. Aber unsere Greifer umschließen im Wesentlichen ein Objekt und heben es dann an – ähnlich wie wir unsere Hände um ein Objekt legen. Dadurch können wir selbst filigrane Objekte „greifen“ und bewegen, ohne an Präzision einzubüßen.“
Die Forscher stellen jedoch fest, dass es eine Vielzahl anderer potenzieller Anwendungen gibt, beispielsweise die Verwendung der Technik zur Entwicklung biomedizinischer Technologien, die sich an die Form eines Gelenks anpassen – wie das menschliche Knie.
„Denken Sie an intelligente Bandagen oder Überwachungsgeräte, die sich mit Ihrem Knie oder Ellbogen beugen und bewegen können“, sagte Yin. „Dies ist eine Proof-of-Concept-Arbeit, die zeigt, dass unsere Technik funktioniert. Wir sind gerade dabei, diese Technik in Soft-Robotik-Technologien zu integrieren, um industrielle Herausforderungen anzugehen. Wir erforschen auch, wie diese Technik verwendet werden könnte, um Geräte zu schaffen, die verwendet werden könnten, um Wärme auf das menschliche Knie anzuwenden, was therapeutische Anwendungen hätte.“
Automatisierungssteuerung System
- Robotergreifer in den USA montiert
- Der ETSI-IoT-Standard:Tun die Regulierungsbehörden genug, um IoT-Geräte zu schützen?
- Meinung:Roboter-End-of-Arm-Tools prägen die Fertigungsindustrie
- OnRobot bringt Roboter-Schleifsystem auf den Markt
- Bobacino bringt Roboter-Teebar auf den Markt
- Best Practices für das robotergesteuerte Kabelmanagement
- Was sind intelligente Schutzschalter?
- Kraft-/Drehmomentsensor erhöht die Roboter-Vielseitigkeit
- Sind Sie bereit für Cobots?
- Was sind Cobots (kollaborative Roboter)?