


Servomotor-Tutorial für Anfänger – Electronicslovers.com
Servomotoren werden auch in der Robotik häufig verwendet Wie in der INDUSTRIE ist Servo heute das Herzstück von ROBOTICS-Projekten, wie z. B. Roboterarm, RC-Autos, Radarschüssel, Förderbänder, Antennenpositionierung, Kamera-Autofokus, Druckverfahren usw.
In vielen Hobbyprojekten sind Servomotoren weit verbreitet. Ich hoffe, dieser Artikel gibt Ihnen eine kurze Information darüber, was eigentlich ein Servo ist, das grundlegende Arbeitsprinzip eines Servomotors, verschiedene Arten von Servos, ein grundlegender Vergleich zwischen einem Servomotor und einem normalen Gleichstrommotor.

Definition des Servomotors:
“ Es ist ein Gerät, das eine Bewegung als Reaktion auf einen Befehl bereitstellt wenn es die Bewegung als Reaktion auf eine negative Rückmeldung reguliert. „
Das Hauptmerkmal des Servos ist die präzise Steuerung der Position seiner Welle. Es ist im Grunde ein System mit geschlossenem Regelkreis (dh negative Rückkopplung).
Es gibt vier Hauptteile in einem Servosystem mit geschlossenem Regelkreis:
- Gleichstrommotor.
- Steuerkreis.
- Zahnräder.
- Positionsrückmeldungssensor.
Der Hauptteil eines Servomotors ist ein kleiner Gleichstrommotor. Diese Gleichstrommotoren haben eine hohe Drehzahl (d. h. hohe Drehzahl) und ein sehr niedriges Drehmoment (d. h. eine Drehkraft, die für die Arbeit verantwortlich ist). Grundsätzlich haben kleine Gleichstrommotoren eine sehr hohe Drehzahl, aber kein viel höheres Drehmoment (d. h. kleine Kraft und größere Entfernung). Aber das Design der Zahnräder im Servo wandelt diese hohe Geschwindigkeit und das niedrige Drehmoment eines Gleichstrommotors in eine langsamere Geschwindigkeit und ein höheres Drehmoment um (d. h. ein kleiner Abstand, eine größere Kraft).
Viele Gleichstrommotoren sind um 5000 U/min schneller, aber die Zahnräder reduzieren diese sehr hohe Drehzahl auf etwa 60 U/min und ein hohes Drehmoment. Kostengünstige Servos haben Zahnräder aus Kunststoff, um das Gewicht leichter und kostengünstiger zu halten, während Servos, die für schwerere Arbeiten ausgelegt sind (d. h. sehr hohes Drehmoment), Zahnräder aus Metall haben, z. B. für Servos, die in der Industrie verwendet werden .
Wenn der Servo zum ersten Mal über die Eingangsleitung mit Strom versorgt wird, dreht sich der Gleichstrommotor mit sehr hoher Drehzahl und sehr geringem Drehmoment, aber aufgrund der Zahnräder wird die Welle des Servos verlangsamt.
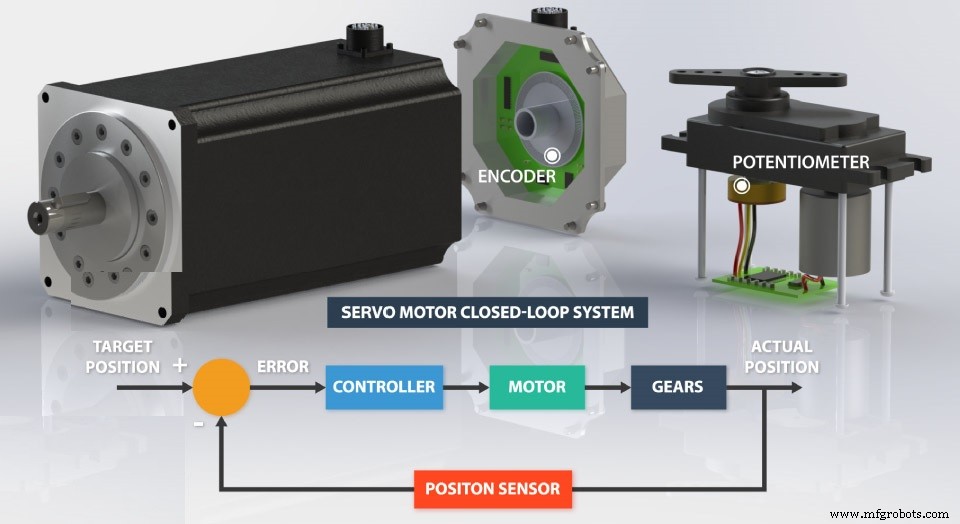 Da der Positionsrückkopplungssensor in einer negativen Rückkopplungsanordnung angeschlossen ist, um die Position eines Servos genau zu steuern die gewünschte Stelle. In industriellen Servos ist der Positionsrückmeldungssensor ein hochpräziser Encoder, aber in einem Hobby-Servo ist der Positionssensor ein Potentiometer. Der Positionssensor (d. h. Potentiometer) am Endzahnrad ist mit der Schaltung verbunden, die den Fehlerdetektor enthält (d. h. dieser Fehlerdetektor ist im Grunde ein Komparator, der zwei Signale vergleicht, eines von der Eingangsleitung, auch Zielposition genannt, und das andere vom Ausgang durch Potentiometer, auch Istposition genannt) und einem auf der Platine eingebetteten Controller-IC.
Da der Positionsrückkopplungssensor in einer negativen Rückkopplungsanordnung angeschlossen ist, um die Position eines Servos genau zu steuern die gewünschte Stelle. In industriellen Servos ist der Positionsrückmeldungssensor ein hochpräziser Encoder, aber in einem Hobby-Servo ist der Positionssensor ein Potentiometer. Der Positionssensor (d. h. Potentiometer) am Endzahnrad ist mit der Schaltung verbunden, die den Fehlerdetektor enthält (d. h. dieser Fehlerdetektor ist im Grunde ein Komparator, der zwei Signale vergleicht, eines von der Eingangsleitung, auch Zielposition genannt, und das andere vom Ausgang durch Potentiometer, auch Istposition genannt) und einem auf der Platine eingebetteten Controller-IC.
Aufgrund der Drehung der Zahnräder dreht sich der Knopf des Potentiometers, wodurch Spannungen erzeugt werden, die mit dem Fehlerdetektor verbunden sind. Nun wird der Fehler aufgrund des Vergleichs zweier Signale durch den Komparator erzeugt, der mit dem Controller-IC verbunden ist (d. h. dieser Controller ist eine auf einem Chip integrierte H-Brücke). Nach dem Vergleich wird ein Fehler erzeugt, der die Steuerung aktiviert, die die Drehung der Welle in beiden Richtungen entscheidet, um die Zielposition zu erreichen. 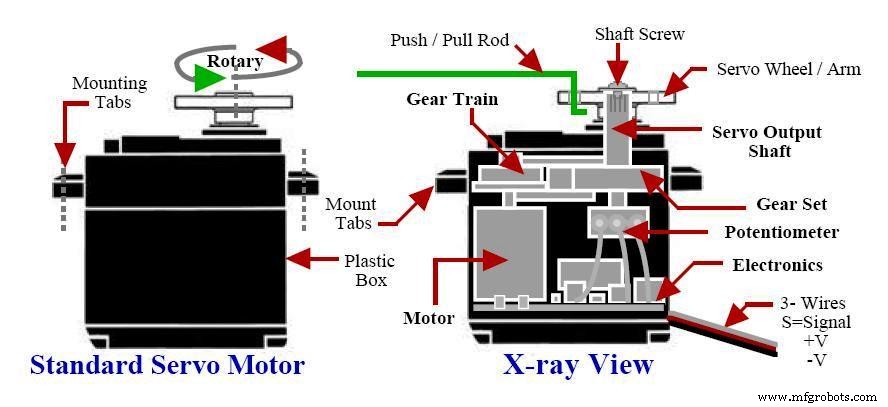
Arten von SERVOS:
Servo gibt es in verschiedenen Varianten.
- POSITIONELLER ROTATIONSSERVO:
Die Abtriebswelle dreht sich nur um 180 Grad. Zusätzliche Anschläge sind angebracht, um die weitere Drehung der Welle außerhalb ihres Bereichs zu begrenzen (zB:ROBOTIC-Arme, Ruder usw.)
- KONTINUIERLICHER ROTATIONSSERVO:
Es ähnelt dem Positionsrotationsservo, kann sich jedoch kontinuierlich um 360 Grad drehen. Die an das Servo gesendeten Befehle bewirken, dass es sich entweder im Uhrzeigersinn oder gegen den Uhrzeigersinn mit unterschiedlicher Geschwindigkeit dreht (z. B.:RADAR-Schüssel usw.).
- LINEARSERVO:
Die Bewegung dieses Servos erfolgt hin und her und nicht in kreisförmiger Richtung (z. B.:CNC-Maschine, 3D-Drucker usw.).
BASISVERGLEICH ZWISCHEN SERVO UND GLEICHSTROMMOTOR:
Servomotoren können sich um 180 Grad hin und her drehen, aber Gleichstrommotoren können sich um 360 Grad drehen, solange sie mit Strom versorgt werden. Heutzutage ist Servo auch in der kontinuierlichen Rotation erhältlich, die sich um 360 Grad drehen kann, aber aufgrund des Getriebedesigns ist die Geschwindigkeit des Servos im Vergleich zum Gleichstrommotor geringer. Gleichstrommotoren sind die beste Wahl für freilaufende Roboter, wohingegen Servos die beste Wahl sind, wenn wir Präzision benötigen (z. B.:ROBOTERARM, Scheibenwischer, Bootsruder usw.).
Die Drehzahl des Gleichstrommotors wird durch die PWM-Technik (Pulsweitenmodulation) gesteuert (d. h. durch Variieren des Tastverhältnisses können wir die Drehzahl des Gleichstrommotors steuern). Zum Beispiel:Ein Tastverhältnis von mehr als 50 % bedeutet eine höhere Geschwindigkeit, ein Tastverhältnis von weniger als 50 % bedeutet eine langsamere Geschwindigkeit.
Während die PWM-Technik in Servomotoren eher die Position seiner Welle als die Geschwindigkeit bestimmt. Sobald der Befehl an das Servo gesendet wird, stellt es die Position der Welle genau auf die gewünschte Position ein. Somit macht dieses automatisch einstellbare Verhalten seiner Welle das Servo zur perfekten Wahl für ROBOTICS-Anwendungen.
Industrietechnik
- Renesas erweitert Mikrocontroller-Optionen für die Servosteuerung in Industrierobotern
- Raspberry Pi-Roboter bauen:Bestes Tutorial für Anfänger
- Einfacher Pi-Roboter
- Programmiersprache C PDF:Grundlagen-Tutorial für Anfänger
- Experten für die Reparatur von Fanuc-Servomotoren
- Tipps für die Reparatur und Fehlerbehebung von Servomotoren
- Für welche Art von Laserschneider ist der Servomotor geeignet?
- Motorkabel für Antriebe mit variabler Drehzahl
- Ein Überblick für Anfänger:Was ist Metallverarbeitung?
- Die Schönheit des Planetengetriebes für Servomotoren