


L293D-Treibermotor:Wie man ihn mit Arduino an einen Gleichstrommotor anschließt
Angenommen, Sie beabsichtigen, einen Roboter oder ein Spielzeugauto zu entwerfen, dann ist das Wissen über Motoren von größter Bedeutung. Eine sehr kostengünstige und einfache Möglichkeit, diese Motoren zu steuern, ist die Verwendung einer L293D-Treiber-Motorabschirmung. Besser noch, verwenden Sie es in einer Schnittstelle mit einem Mikrocontroller wie Arduino.
Unter anderem ist der L293D-Motortreiber einer der beliebtesten Chipsätze seiner Art. Mehr noch, für seine vielfältigen Anwendungen in elektronischen Konstruktionen wie Servos, Schritt- und Gleichstrommotoren. Seine entscheidende Eigenschaft scheint jedoch seine Richtungs- und Geschwindigkeitssteuerung in zwei unabhängigen Gleichstrommotoren zu sein. Und das erfahren Sie weiter unten in diesem instructable.
1. Was ist der L293D-Motortreiber?
Dieser 16-polige Chipsatz ist ein zweikanaliger H-Brückentreiber für Motoren. Seine Hauptfunktion besteht häufig in der Steuerungsschnittstelle für Gleichstrommotorpaare oder in einem einzelnen Schrittmotor.
Standardmäßig wird der L293D-Motortreiber-Shield-Chipsatz zu zweit geliefert. Daher ist es in der Lage, vier Gleichstrommotoren anzutreiben. Aus diesem Grund ist der L293D-Chipsatz ein wertvolles Baumaterial für vierrädrige Roboter.
Insgesamt bietet Ihnen das Schild vier H-Brücken. Daher liefert jede H-Brücke einen Motorstrom von 0,6 A. Auch das Schieberegister 74HC595 ist ein Sicherheitsmerkmal. Dieses Register erweitert somit die acht Steuerpins des dualen L293D-ICs auf die vierstelligen Pins des Arduino.

(Ein vierfacher Hochstrom-H-Brücken-16-Pin-L293D-Motortreiber).
2. Funktionen des l293D-Motortreibers
Einige Merkmale, die den L293D-Motortreiber zu einer so guten Komponente in CNC- und Roboterprojekten machen, sind:
- Es ermöglicht Ihnen, die Richtung und die Geschwindigkeitsstufen im angewendeten Gerät zu steuern.
- Interessanter ist, dass der Treiber es ermöglicht, zwei ähnliche Doppel-DC-Motoren zu betreiben.
- Die Motorspannung, Vs. (Vcc2) liegt zwischen 4,5 V und 36 V.
- Außerdem beträgt der maximale Motordauerstrom 600 mA.
- Auf der anderen Seite beträgt der maximale Spitzenstrom des Motors 1,2 A.
- Die Vss(Vcc1)-Versorgungsspannung liegt zwischen 4,5 V und 7 V.
- Die Übergangszeit beträgt höchstens 300 ns zwischen 5 V und 24 V.
- Durch thermische Aktivierung ist eine automatische Abschaltung möglich.
- Schließlich ist der IC in SOIC-, DIP- und TSSOP-Paketen erhältlich.
3.L293D Pin-Konfiguration der Abschirmung des Motortreibers
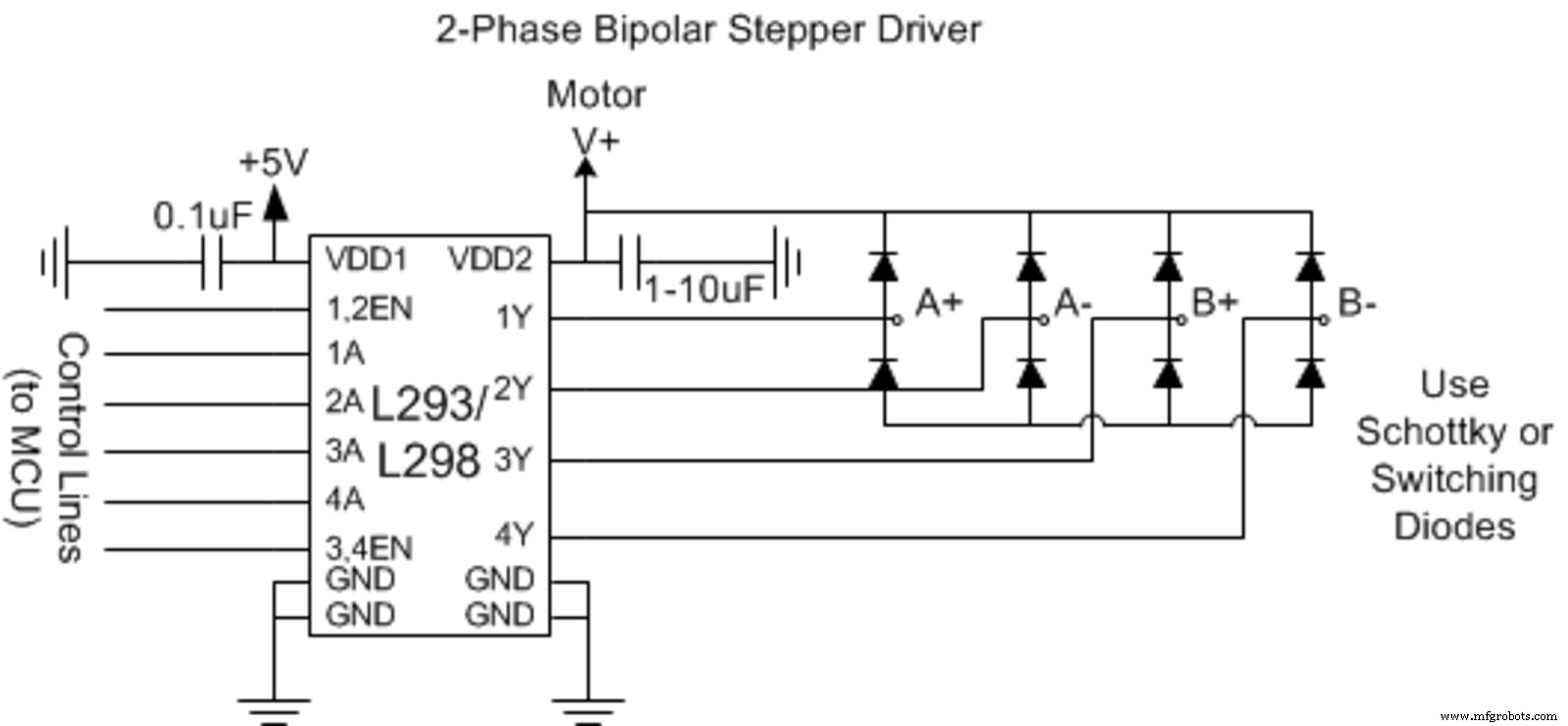
(Ein schematisches Pin-Diagramm, das einen bipolaren L293D-Schrittmotortreiber zeigt).
| PIN-Nummer | Name des Pins | Pin-Beschreibung |
| 1 | 1,2 aktivieren | Dieser Anschluss aktiviert die Eingangspins:Eingang 1(2) und Eingang 2(7). |
| 2 | Eingangspin 1 | Funktioniert als direkte Steuerung für Ausgang 1 Pin. Sie finden es oft in der digitalen Schaltungssteuerung anwendbar. |
| 3 | Ausgang Pin 1 | Dieser Stift ist mit einem Ende verbunden, Motor 1. |
| 4 | Boden | An einem Ende geht dieser Pin an die Schaltungsmasse (0 V). |
| 5 | Boden | Wir haben diesen anderen Erdungsstift (0 V) auf der anderen Seite. |
| 6 | Ausgang Pin 2 | Wie bei Ausgangsstift 1 ist dieser Anschluss mit dem anderen Ende von Motor 1 verbunden. |
| 7 | Eingang Pin 2 | Er steuert direkt den Ausgang 2-Pin. Es ist auch in digitalen Schaltungssteuerungen anwendbar. |
| 8 | Vs. (Vcc2) | Mit einer Nennspannung von 4,5 V bis 36 V wird es an den Spannungsstift angeschlossen und versorgt die Motoren. |
| 9 | Aktiviere 3,4 | Dieser Anschluss aktiviert nur die Eingangspins:Eingang 3(10) und Eingang 4(15). |
| 10 | Eingabe 3 | Er bietet eine direkte Steuerung für den Ausgang 3-Pin. Darüber hinaus fungiert es als weiterer Ausgang für die Steuerung digitaler Schaltkreise. |
| 11 | Ausgang 3 | Dieser Pin ist mit einem Ende von Motor 2 verbunden. |
| 12 | Boden | Hier verbindet der Ground-Pin die Masse der Schaltung (0V) |
| 13 | Boden | Noch ein weiterer Erdungsstift, der mit der Masse der Schaltung (0 V) verbunden ist |
| 14 | Ausgang 4 | Wie Ausgang 3 geht dieser Pin auch an das andere Ende von Motor 2. |
| 15 | Eingabe 4 | An diesem Ende bietet es eine direkte Steuerung für den Ausgang 4-Pin. Es fungiert auch als digitale Schaltungssteuerung. |
| 16 | Vss (Vcc2) | Schließlich wird der Pin mit einer externen Spannung von +5 V verbunden, die für die Versorgung des IC verantwortlich ist. |
4. Arbeitsprinzip des L293D-Motortreibers
Wie bereits erwähnt, kann der L293D-Motortreiber zwei Gleichstrommotoren steuern. Daher ist es wichtig zu verstehen, wie dieser zweikanalige H-Brücken-IC funktioniert.
(Ein Diagramm, das einen unipolaren 5-Volt-Motor zeigt, der mit einem L293D verbunden ist).
In der ersten Stufe des Arbeitsprinzips wird eine H-Brücke aufgebaut. Mit anderen Worten, es werden Doppelpaare von Darlington-Transistoren verwendet, die wir Q2/Q3 und Q1/4 nennen. Jeweils gegenüber ist eine Diode mit Kollektor und Emitter der Transistoren verbunden. Dadurch wird verhindert, dass die vom Motor erzeugte Gegen-EMK die Transistoren beschädigt.
Wenn sich also die Transistoren Q1/Q4 in der EIN-Position befinden, gehen die Transistoren Q2/Q3 aus. Somit fließt Strom von Vcc über den Motor und zur Masse.
Diese Aktion veranlasst eine Drehung des Motors im Uhrzeigersinn/gegen den Uhrzeigersinn. Zusammenfassend bestimmen die Polarität des Motors und die Art des Anschlusses an die Stromversorgung die Drehrichtung.
Wenn andererseits die Transistoren Q1/Q4 AUS sind, schalten Q2/Q3 automatisch EIN. Der über den Motor fließende Strom kehrt sich also um. Wenn also dieser Rückstrom fließt, ändert sich auch die Drehrichtung des Motors.
5. Wie verwenden wir den L293D-Motortreiber?
Wie bereits erwähnt, verwendet der L293D-Motortreiber einen bidirektionalen Treiberstrom von etwa 600 mA und einen Bereich von 4,5 V bis 36 V. Diese Funktionen erfordern jedoch die Verwendung dieses 16-poligen Motortreiberchips mit Arduino Uno.
Daher stellen wir ein Projekt vor, das Gleichstrommotoren und L293D mit ARDUINO verbindet. Hier ist also ein schrittweises Verfahren zum Einstellen der Schaltung, die Richtung und Geschwindigkeit des DC-Motors steuert.
Schritt Eins:Stellen Sie die Materialien zusammen, die Sie für das Projekt benötigen.
- Zwei 10K-Potentiometer.
- L293D-Motortreiber-Chipsatz.
- Zwei kleine Gleichstrommotoren.
- Arduino Uno oder Arduino Pro Mini.
- Brotbrett.
- Überbrückungsdrähte.
Schritt Zwei:Schaltung einrichten
Die Verbindungen in dieser Schaltung sind ziemlich einfach.
Wir verwenden jedoch ein Video-Tutorial, um die Schaltung für eine genauere Veranschaulichung einzurichten.
Der Motor ist oft mit einer anderen Stromversorgung besser dran. In diesem Fall verwenden wir 12 V für den Motor. Andererseits versorgt eine 5-V-Versorgung den L293D und Arduino.
Hinweis:Die externe Stromquelle geht an Pin 8 des L293D. Treffen Sie beim Herstellen dieser Verbindungen Vorsichtsmaßnahmen. Andernfalls riskieren Sie Schäden an den Motoren.
Schritt Drei:Der Code zum Programmieren eines Gleichstrommotors
Wir werden das tun, und zwei grundlegende Schritte sind erforderlich.
Installieren Sie die AFMotor.h-Bibliothek.
Als erstes brauchen wir ein Kommunikationsmedium mit dem L293D IC. Dazu müssen wir die Bibliothek AFMotor.h installieren.
Diese Bibliothek ermöglicht es uns, Befehle auszugeben, die Gleichstrom-, Solenoid- und Schrittmotoren steuern.
Um die AFMotor.h-Bibliothek zu installieren, scrollen Sie zuerst zu Sketch. Suchen Sie dann nach „Bibliothek einbeziehen“ und anschließend nach „Bibliotheken verwalten“. Der Bibliotheksverwalter aktualisiert die installierte Bibliotheksliste, während der Bibliotheksverwalter den Index herunterlädt.
Verwenden Sie anschließend den Suchfilter, um „Motor Shield“ zu finden. Wählen Sie unter den Einträgen die Adafruit Motor Shield Library von Adafruit aus und klicken Sie dann auf Installieren.
Führen Sie den Arduino-Code aus
Als nächstes müssen wir den folgenden Arduino-Code ausführen:
#include
AF_DCMotor motor(4);
void setup()
{
//Setze die Startgeschwindigkeit für den Motor und stoppe
motor.setSpeed(200);
motor.run(RELEASE);
}
void loop()
{
uint8_t i;
// Motor einschalten
motor.run(FORWARD);
// Von 0 auf maximale Geschwindigkeit beschleunigen
für (i=0; i<255; i++)
{
motor.setSpeed (i);
Verzögerung(10);
}
// Abbremsen von Höchstgeschwindigkeit auf 0
für (i=255; i!=0; i–)
{
motor.setSpeed (i);
Verzögerung(10);
}
// Ändern Sie dann die Motorrichtung
motor.run (RÜCKWÄRTS);
// Von 0 auf maximale Geschwindigkeit beschleunigen
für (i=0; i<255; i++)
{
motor.setSpeed (i);
Verzögerung(10);
}
// Abbremsen von Höchstgeschwindigkeit auf 0
für (i=255; i!=0; i–)
{
motor.setSpeed (i);
Verzögerung(10);
}
// Jetzt Motor ausschalten
motor.run(RELEASE);
Verzögerung(1000);
}
Schritt 4:Einrichtung abgeschlossen
In diesem Stadium ist Ihr DIY-Schaltungsaufbau abgeschlossen. Sie haben jetzt einen Steuermechanismus für jedes Gleichstrommotorgerät mit diesem L293D-Chip und dem Arduino Uno-Mikrocontroller.
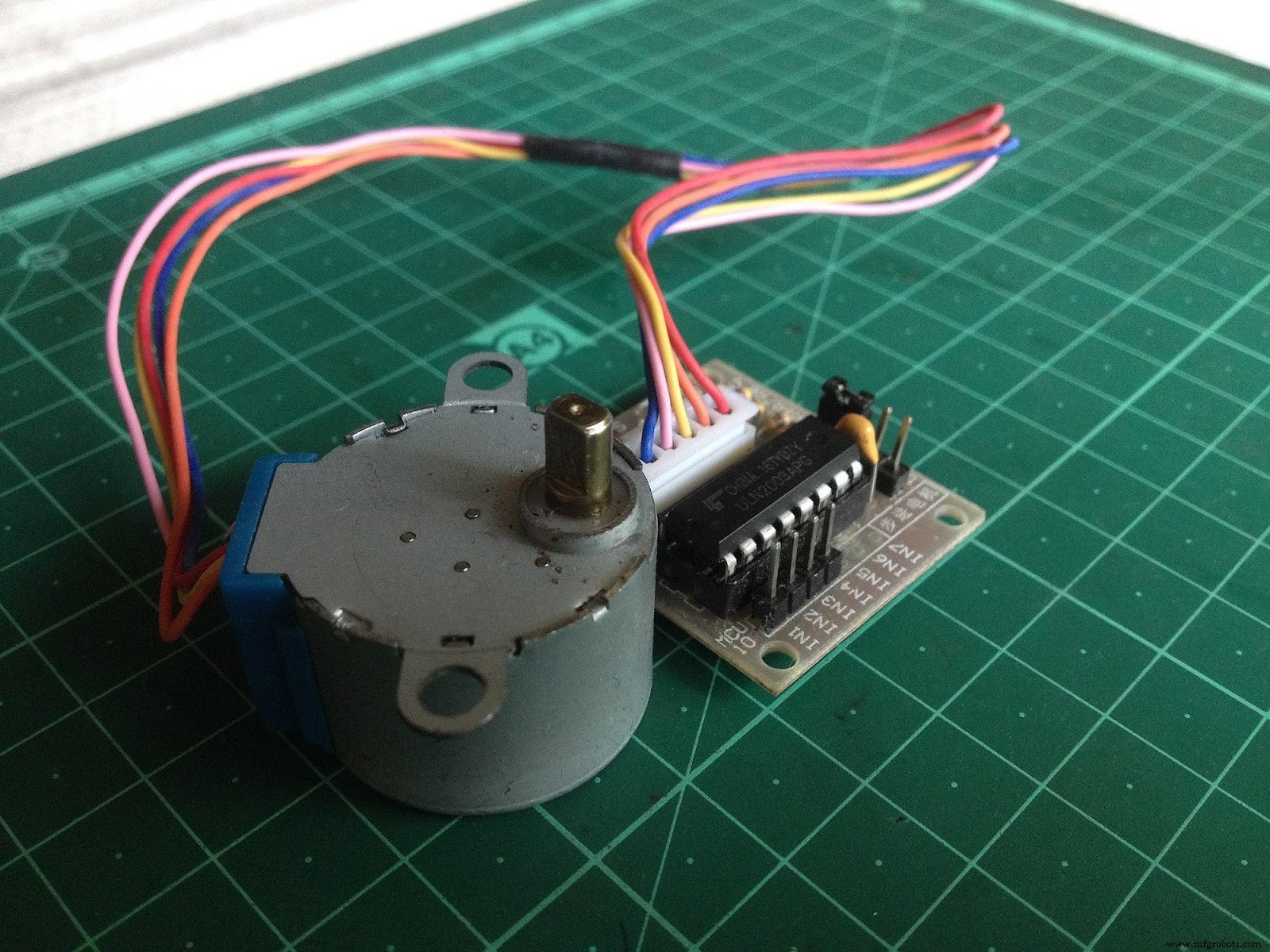
6.L293D-äquivalenter Dual-Timer-IC
Andere dem L293D ähnliche ICs umfassen ULN2003, SN754410, LB1909MC.
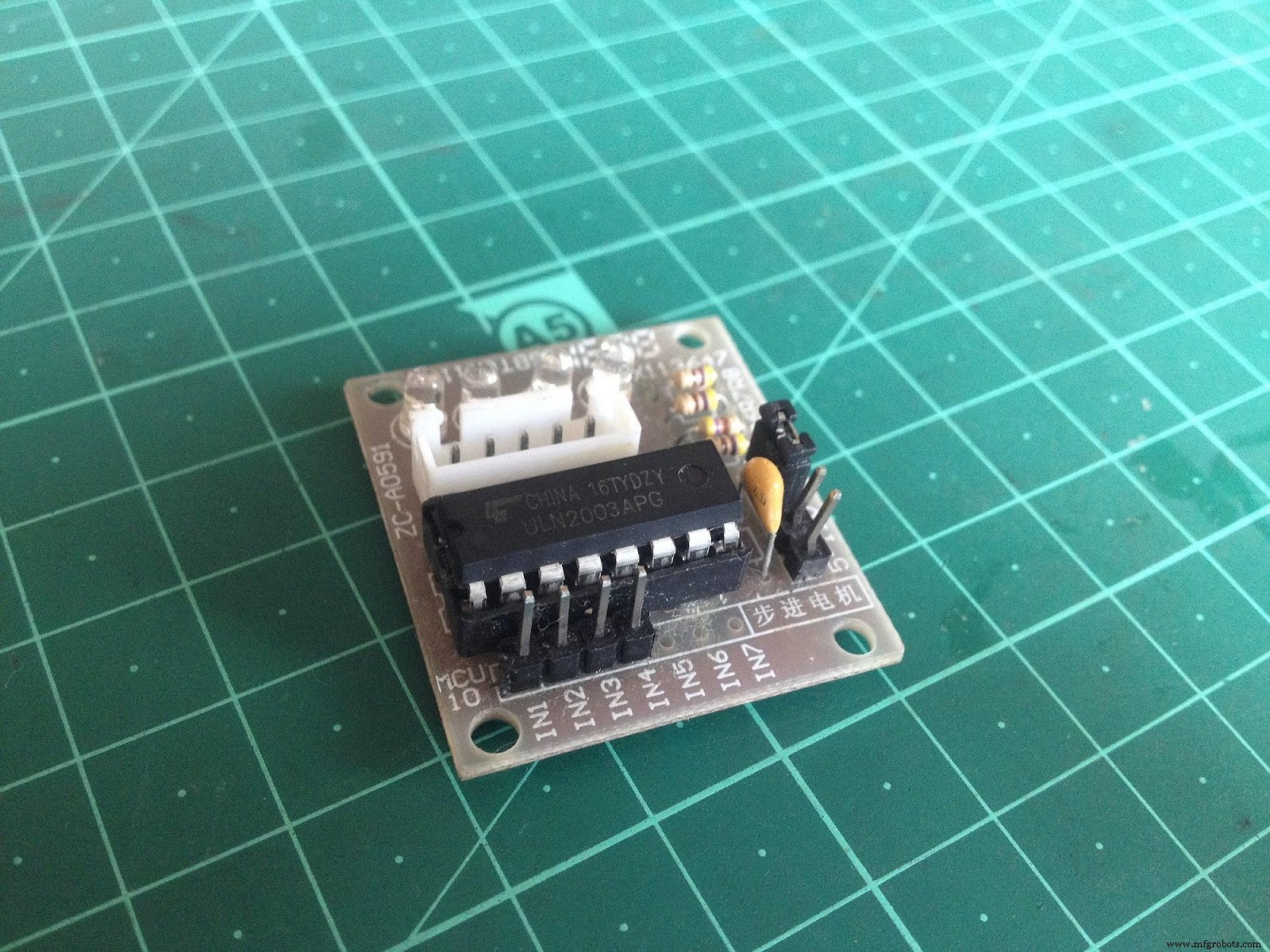
(Ein ULN2003-IC auf einer Platine, der die beschrifteten Pins und die Verbindungspunkte zeigt)
7. Die Anwendungen von L293D
- Es hilft Ihnen, Hochstrom-LED-Geräte zu betreiben.
- Außerdem ist es in Hochstrommotoren anwendbar, die von digitalen Schaltkreisen wie Robotern betrieben werden.
- Der L293D-Treiber ist ein integraler Bestandteil von Schrittmotoren und Motoren im Allgemeinen.
- Zur Verwendung in Relaistreibermodulen. Daher ermöglicht es ein selbsthaltendes Relais.
Zusammenfassung
Es gibt andere verschiedene Methoden, um Gleichstrommotoren mit Arduino auf mehr als eine Weise zu steuern. Eine der einfachsten Möglichkeiten ist jedoch die Verwendung eines L293D-Motortreiber-ICs. Ein L293D-IC bietet einen Vorteil für die gleichzeitige Steuerung der Geschwindigkeit und Richtung von zwei separaten Gleichstrommotoren.
Zusammenfassend haben wir gelernt, wie man mit diesem IC einen Gleichstrommotor einrichtet und programmiert. Aber vielleicht möchten Sie sich an etwas Herausfordernderem versuchen. Weitere Tutorials dazu finden Sie auf unserer Kontaktseite, um eine vollständige Anleitung zu erhalten.
Industrietechnik
- Robotersystem zur Erkennung von Menschen mit Arduino Uno
- Lesen des RC-Empfänger-PPM-Signals mit Arduino
- Android-gesteuertes Spielzeug mit Raspberry Motor Shield
- So misst man die Masse der Erde mit Arduino
- So erstellen Sie eine Website, die Arduino mithilfe von PHP kommuniziert
- DIY Arduino Roboterarm – gesteuert durch Handgesten
- Arduino - Zeichnen über das Web mit Schrittmotorsteuerung
- Wie funktioniert ein gebürsteter Gleichstrommotor
- So erstellen Sie einen Kompass mit Arduino und Processing IDE
- Überprüfen eines Gleichstrommotors