


A4988-Pinbelegung:Ultimativer Leitfaden für seine Funktionen, Operationen, Pinbelegungen und mehr!
Ein Schrittmotor ist ein Motortyp, der elektrische Energie in mechanische Energie umwandelt. Die Pinbelegung des A4988 ist ein Beispiel für diesen Schrittmotor. Es ist ein trendiger Mikroschrittmotor, da er sehr erschwinglich und langlebig ist.
In diesem Artikel werden wir den Schrittmotor a4988, seine Funktionen, die Beschreibung der Pinbelegung und den Schritt-für-Schritt-Prozess zum Anschließen eines Schrittmotors besprechen.
Was ist ein A4988 Schrittmotortreibermodul?
Ein a4988 ist ein Mikroschritttreiber mit einem eingebauten Übersetzer, der die Bedienung erleichtert. Das Design des Motors besteht darin, einen bipolaren Schrittmotor in Schrittmodi zu betreiben. Wenn Sie einen einzelnen Impuls am STEP-Eingang eingeben, treibt er den Motor in einem Mikroschritt an. Außerdem besteht die Motorstruktur aus einem festen Stromregler. Dieser Stromregler hat das Potenzial, in langsamen oder gemischten Decay-Modi zu arbeiten.
Außerdem fehlen bei einem a4988 eine Phasenfolge, aufwändige Schnittstellen zum Programm und hochfrequente Steuerleitungen.
Darüber hinaus ist der Motorschnittstellentyp, den ein a4988-Motor bietet, ideal für Projekte, bei denen Mikroprozessoren nicht verfügbar oder überlastet sind.

(ein zerlegter Schrittmotor)
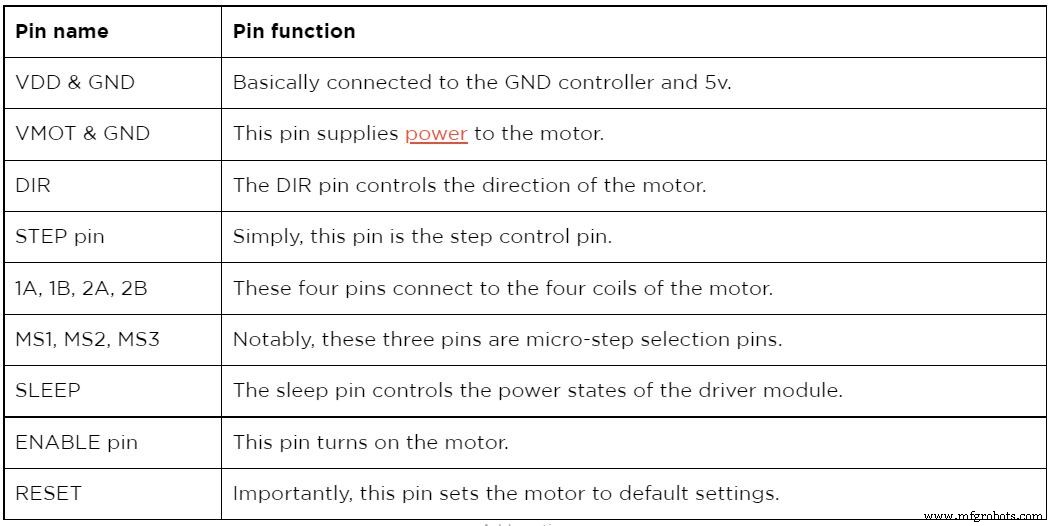
A4988-Pinbelegungskonfiguration

(ein zerlegter Motor mit Rotorsatzseite.)
A4988 Funktionen und Vorteile
- Erstens hat das elektronische Gerät a4988 fünf wählbare Modi. Dies sind zum Beispiel der volle, der ½-Schritt, der ¼-Schritt, der 1/8- und der 1/16-Schritt.
- Zweitens verfügt das Gerät über Kurzschluss-zu-Masse- und Kurzschluss-Last-Schutzfunktionen, wobei der Motor über eine thermische Abschaltschaltung verfügt.
- Drittens hat das Gerät keinen Verpolungsschutz, aber einen Übergangsstromschutz und relativ niedrige RDS(ON)-Ausgänge.
- Außerdem verfügt es über eine automatische Erkennung des aktuellen Abfallmodus und eine Größe von 15,5 mm x 20,5 mm.
- Außerdem hat der Schrittmotor eine maximale Betriebsspannung von 35 V und eine minimale Betriebsspannung von 8 V.
- Außerdem verfügt der Hybrid-Schrittmotortreiber A4988 über eine simultane Gleichrichtung für eine geringe Verlustleistung.
- Schließlich beträgt der maximale Strom pro Phase 2 A mit einem internen UVLO.

(ein elektrischer Schrittmotor.)
A4988 Alternative Produkte
Ähnlich wie bei jedem anderen elektrischen Gerät verfügt der a4988-Motor über alternative Optionen. Zu den Alternativen gehören insbesondere DRV8825, L6207, L6474, L6208, TMC2209 und TMC2208.
Wie wird das A4988-Treibermodul verwendet?
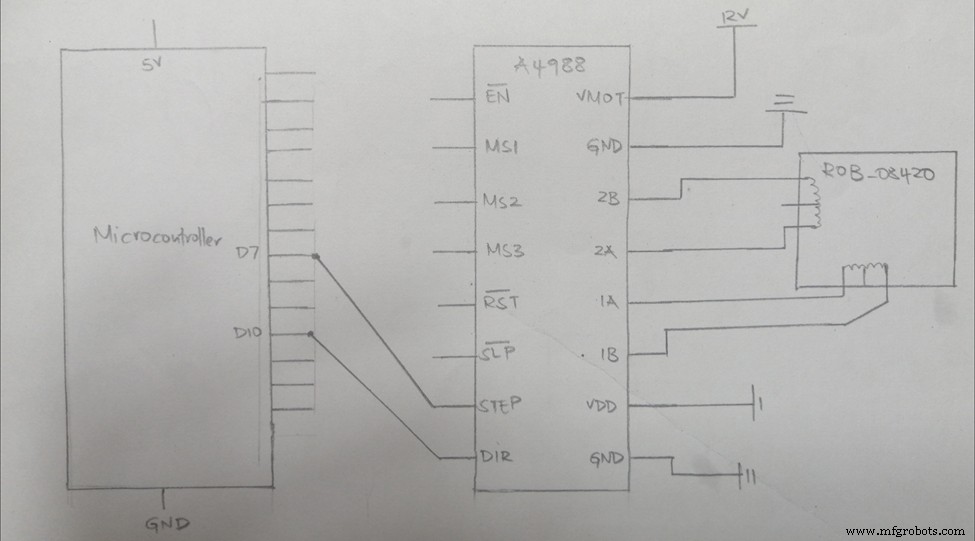
(Diagramm einer a4988-Elektronikschaltung mit einem Mikrocontroller.)
Ein Projektbeispiel ist die Verdrahtung eines A4988-Treibermoduls und Arduino. Die Motoranschlüsse eines A4988-Treibers und Arduino sind sehr einfach.
Verbindungsschritte.
Die erste Verbindung verbindet die VDD- und GND-Pins mit den 5V- und GND-Pins des Arduino.
Als nächstes verbinden Sie den Richtungsstift und den SCHRITT-Stift mit den digitalen Ausgangsstiften Nr. 2 und Nr. 3 auf dem Arduino. Stellen Sie außerdem sicher, dass Sie die Pins 1B, 1A, 2B und 2A mit dem Schrittmotor verbinden. Beachten Sie, dass es sehr praktisch ist, einen a4988-Stepper zu verwenden, da sein Layout mit einem 4-poligen Stecker übereinstimmt, der an vielen bipolaren Motoren zu finden ist.
Aktivieren Sie nun den Treiber, indem Sie den RST-Pin mit dem SLP-Pin verbinden. Denken Sie daran, dass Sie die Mikroschritt-Auswahlstifte immer getrennt lassen, um den Motor im Vollschrittmodus zu betreiben.
Schließen Sie zuletzt die VMOT- und GND-Pins an die Motorstromversorgung an. Stellen Sie sicher, dass Sie immer einen Entkopplungs-Elektrolytkondensator verwenden, auch wenn ein Keramikkondensator mit niedrigem ESR im Treiber vorhanden ist. Der Entkopplungskondensator schützt den Treiber vor Spannungsspitzen.
Wichtiger Tipp:
(ein isolierter Schrittmotor mit Drähten.)
A4988 Pinbelegung:Code
Unten ist ein einfacher Beispielcode für die Schrittmotorsteuerung
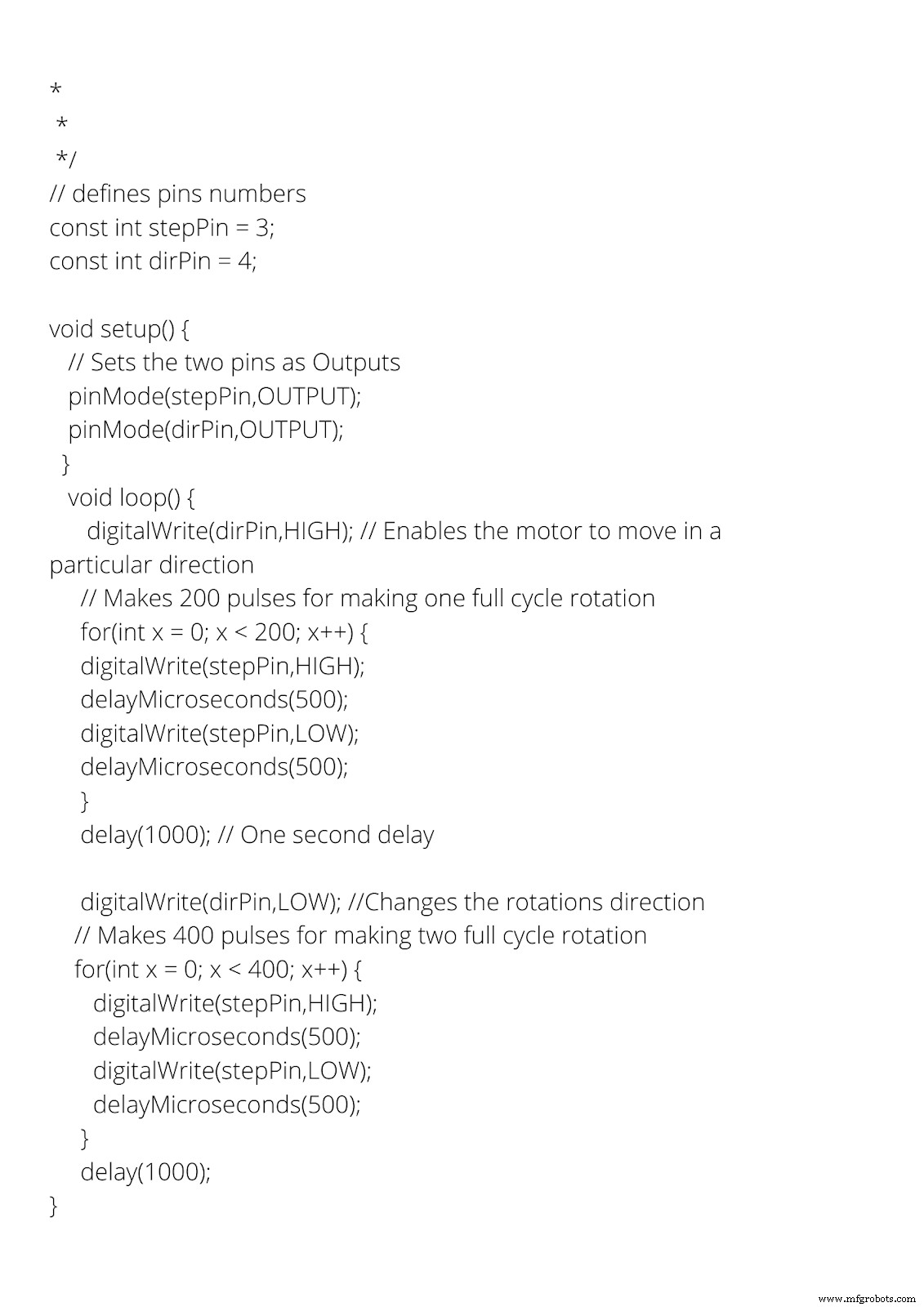
(Bild des Schrittmotor-Steuercodes )
Kopieren Sie den obigen Code und fügen Sie ihn in Ihre IDE ein.

(ein dekonstruierter Schrittmotor).
Setzen Sie den DIR-Pin auf High oder Low, um eine erfolgreiche Verbindung herzustellen. Insbesondere dreht sich der Motor im Uhrzeigersinn, wenn er auf hoch eingestellt ist. Wenn er jedoch niedrig ist, schaltet der Motor gegen den Uhrzeigersinn.
Der STEP-Pin empfängt eine Impulsfrequenz, die die Schrittmotorgeschwindigkeit bestimmt. Ein Impuls ist in diesem Fall der Prozess, den Ausgang auf HIGH zu ziehen. Warten Sie dann eine Weile, bevor Sie denselben Ausgang auf LOW ziehen, und warten Sie erneut. Jede Änderung der Wartezeit zwischen den beiden Impulsen ändert die Impulsfrequenz und damit die Motordrehzahl.

(ein Elektromotor.)
A4988 Pinbelegung:Strombegrenzung
Bevor Sie den Motor verwenden, müssen Sie den durch die Motorspulen fließenden Strom einstellen und begrenzen. 2A ist der maximale Strom, der durch die Spulen fließen kann. Verwenden Sie daher zum Einstellen der Strombegrenzung das Strombegrenzungspotentiometer am a4988-Treiber. Stellen Sie außerdem die Stromgrenze auf einen niedrigeren oder gleichen Nennwert wie den Nennstrom des Motors ein.
- Überprüfen Sie zuerst das Datenblatt auf die aktuellen Bewertungen, um Anpassungen vorzunehmen.
- Zweitens lassen Sie den Treiber im Vollschrittmodus.
- Drittens:Tarnen Sie die STEP-Eingabe nicht. Dies trägt wesentlich dazu bei, den Motor in einer festen Position zu halten.
- Verwenden Sie als Nächstes das Trimmpotentiometer, um die Referenzspannung (Vref) zu messen, wenn Sie die Einstellungen vornehmen.
- Verwenden Sie zum Schluss die Strombegrenzung =Vref x 2,5, um die Referenzspannung einzustellen.
(Ein Bild zeigt verschiedene Motortypen.)
A4988-Anwendung
- Anwendungen für Kinderspielzeug.
- Roboter verwenden einen a4988-Hybrid-Schrittmotor, um ihre Bewegungen zu steuern.

(ein Schrittmotor-Schnittstellentyp mit einem grünen Draht.)
Zusammenfassung
Dieser Artikel enthält Informationen über die Funktionen des AD9850 DDS-Signalgeneratormoduls, seine Anschlüsse und seine Funktionsweise. Wenn Sie mehr über Ihre modulbezogenen Projekte erfahren möchten, kontaktieren Sie uns! Unser Team beantwortet gerne Ihre Fragen!
Industrietechnik
- Leitfaden zu USB-C-Pinbelegung und -Funktionen
- Social Media für Hersteller:Der ultimative Leitfaden [eBook]
- Ein Leitfaden für Einzelhändler zur Optimierung der Arbeit und des Betriebs nach der Covid-Erkrankung
- Design for Assembly und seine Verwendung in der Produktherstellung
- Lagerproduktivität:15 Experten verraten ihre besten Tipps für einen effizienteren und produktiveren Lagerbetrieb
- Leitfaden zum Facility Management:Betriebs- und Managementstrategien, Projektmanagement, Führung und mehr
- Vollständiger Leitfaden zum Versagen des Servomotors und seine Ursachen
- Ultiboard – Der ultimative Leitfaden für das Beste für Anfänger
- Transistor 2N3771:Pinbelegung, Funktionen, Anwendungen und Alternativen
- AT89c51-Mikrocontroller:Programmierung, Pinbelegung, Funktionen und Alternativen