


Infinity Gears
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Notwendige Werkzeuge und Maschinen
|
Über dieses Projekt
Arthur Ganson baute eine inspirierende Skulptur namens "Machine with Concrete", die aus 12 Stufen von 1/50-Getrieben besteht, die alle miteinander verbunden sind. Das erste Zahnrad dreht mit 200 U/min, die volle Umdrehung dauert 1/200 Minuten. Schätze die volle Rotationszeit des letzten Zahnrads (das in Beton vergraben ist):13,7 Milliarden (10^12) Jahre!
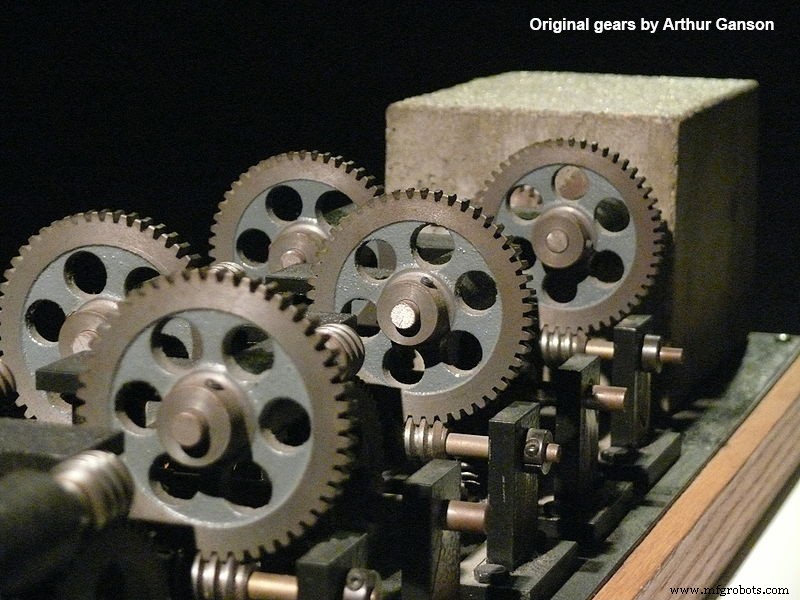
Egal wie schnell Sie den ersten Gang drehen, Ihr Kraftaufwand lässt im System nach. Das Leben ist und fühlt sich ähnlich an. Wir machen viele Dinge und diese tragen nur sehr wenig zum Universum bei. Also das Beste, was wir tun können, ist zu tun, was uns gefällt und was uns glücklich macht!
Also haben wir ein ähnliches Projekt, INFINITY GEARS, in einer kompakteren Form mit Rotationszählerschaltern in verschiedenen Phasen erstellt, die von einem Arduino Uno angetrieben werden. Das erste Zahnrad drehen wir mit einem 250 U/min DC-Getriebemotor.
Erraten Sie die volle Rotationszeit unseres letzten Gangs!? ------> Warten Sie darauf ------> 346 Quintillion (346 x 10^18) Jahre! Sogar das Universum wird (höchstwahrscheinlich) nicht die volle Rotation sehen! Deshalb haben wir das letzte Zahnrad als "nicht drehbares Vierkantzahnrad" konzipiert.
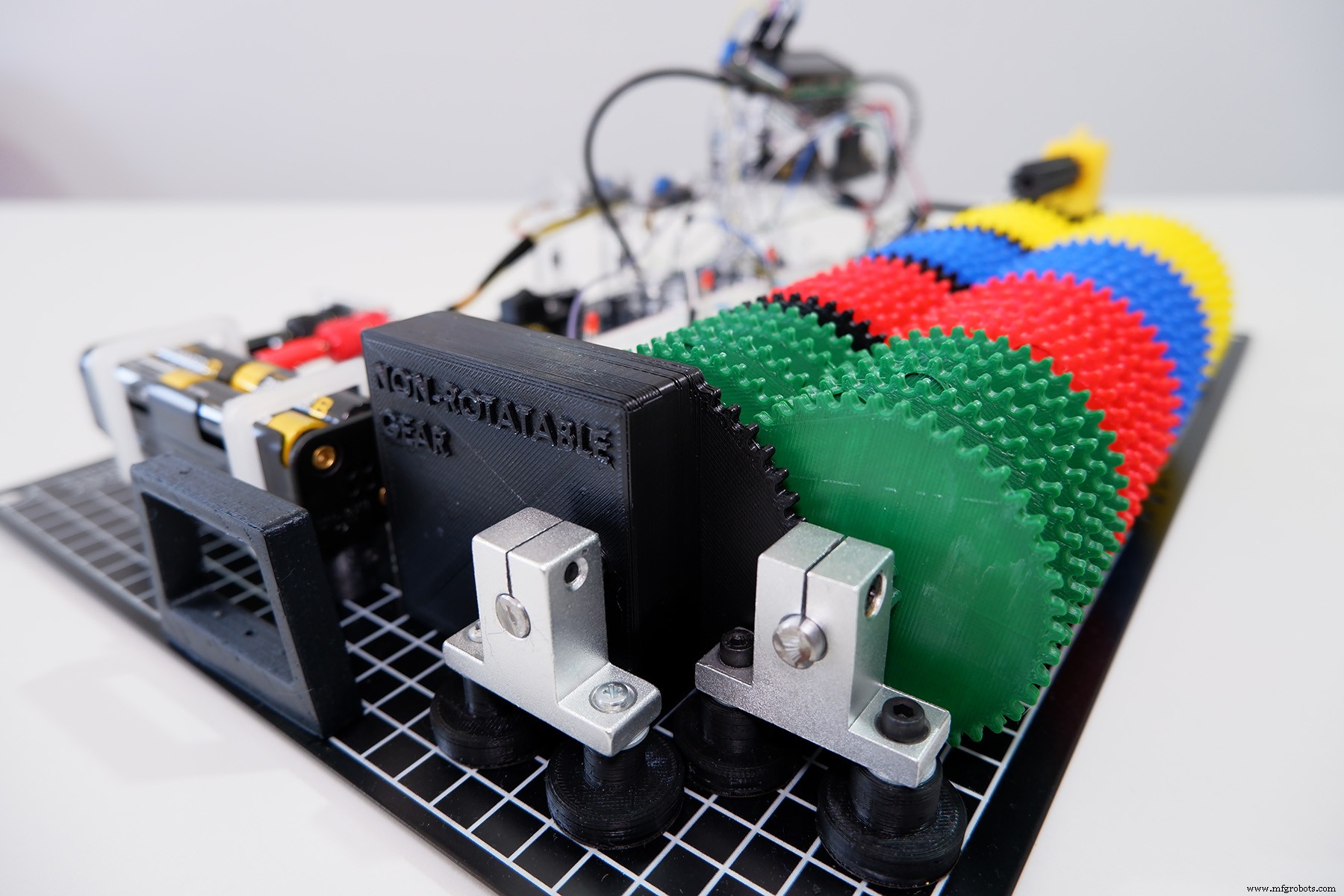
Alle Zahnräder in unserem Projekt sind 3D-gedruckt in Farben, außer 5 schwarzen, die kleine Magnete haben (+1 schwarzes Zahnrad auf der Motorwelle, hat keinen Magneten). Ihre Umdrehungen werden von Reedschaltern + LEDs gezählt, die mit einem Arduino Uno + 2x16 LCD verbunden sind.
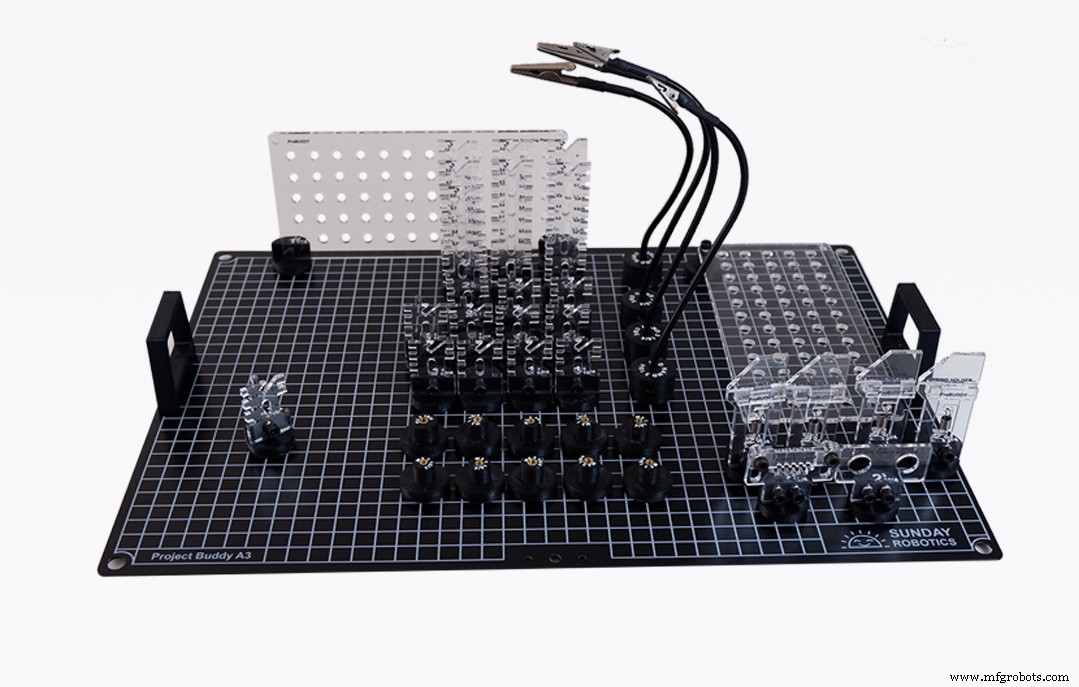
Wir haben das Projekt auf einem ProBUDDY-Kit im A3-Format aufgebaut, das beim Bauen, Aufbewahren und Tragen Ihrer Projekte sehr hilft und erleichtert. (Bald auf Kickstarter am 11.01.2022) Produktseite:https://www.sundayrobotics.com/probuddy/
Das erste schwarze Zahnrad beendet seine volle Umdrehung in 0,002 Minuten, kann leicht gesehen werden..
Der zweite schwarze Gang hingegen absolviert seine volle Umdrehung in 135 Tagen! Wenn du so lange wartest..
3rd Black Gear, OMG, wird seine volle Rotation in 3,6 Millionen (3,6 x 10^6) Jahren abschließen!
4. Schwarzes Zahnrad, OMG, 35 Billionen (35 x 10^12)!
5. Quadratisches schwarzes Zahnrad, OOOOOOMMMMMMMGGGGGGG, 346 Quintillion (346 x 10^18) JAHRE! (Wird das Universum sehen, wie es sich dreht? Nicht sicher!)
Code
- Arduino Uno-Code
Arduino Uno-CodeArduino
#include/* Diese Bibliothek muss für die Verwendung mit LCD-Bildschirmen enthalten sein. */LiquidCrystal LCD(12, 11, 5, 4, 3, 2); /* Arduino-Pins, an die das LCD angeschlossen ist. *//* Definitionen von Reedschaltersensoren. */int reed1 =6;int reed2 =7;int reed3 =8;int reed4 =9;int reed_status1, reed_status2, reed_status3, reed_status4; /* Zählerdefinitionen. */int counter1 =0;int counter2 =0;int counter3 =0;int counter4 =0;void setup() { lcd.begin(16, 2); /* Die Zeilen- und Spaltennummern des LCD werden angegeben. *//* Der Text, der in die erste Zeile des LCD geschrieben werden soll. */ lcd.setCursor(0, 0); lcd.print("SUNDAY ROBOTICS");/* Der Text, der in die zweite Zeile des LCD geschrieben werden soll. */ lcd.setCursor(0, 1); lcd.print("INFINITE GEARS");/* Reed-Schalter werden als Eingang gesetzt. */ PinMode (Reed1, INPUT); PinMode (Reed2, INPUT); PinMode (Reed3, INPUT); PinMode (Reed4, INPUT); Verzögerung (1500); /* Der Begrüßungsbildschirm wartet 1500 Millisekunden. */}void loop () {/* Der Zustand des Reedschaltersensors wird gelesen und dann der Zustand an die Variable übergeben. */ reed_status1 =digitalRead(reed1); reed_status2 =digitalRead (reed2); reed_status3 =digitalRead (reed3); reed_status4 =digitalRead(reed4); // Wenn der Reed-Schalterzustand 0 ist, wartet das System 100 Millisekunden und der Zähler erhöht sich um 1. */ if(reed_status1 ==0){ delay(100); Zähler1++; aufrechtzuerhalten. Sonst if (reed_status2 ==0) { Verzögerung (100); Zähler2++; aufrechtzuerhalten. Sonst if (reed_status3 ==0) { Verzögerung (100); Zähler3++; aufrechtzuerhalten. Sonst if (reed_status4 ==0) { Verzögerung (100); Zähler4++; } } lcd.clear(); /* Reinigen Sie den LCD-Bildschirm. */ /* Der Text, der nach dem Begrüßungsbildschirm geschrieben werden soll. */ lcd.setCursor(0, 0); lcd.print("UNENDLICHE ZAHNRÄDER"); /* Zählerwerte werden in die zweite Zeile geschrieben. */ lcd.setCursor(0, 1); lcd.print("F:"); lcd.print (Zähler1); lcd.print(" S:"); lcd.print (Zähler2); lcd.print(" T:"); lcd.print (Zähler3); lcd.print(" F:"); lcd.print (Zähler4); lcd.print(" F:"); lcd.print (Zähler5); }
Kundenspezifische Teile und Gehäuse
Wir werden 41 Stirnräder + Motorgetriebe haben, die alle miteinander verbunden sind. Jedes Zahnrad hat außen 45 Zähne und innen 9 Zähne. Das Motorzahnrad hat auch 9 Zähne.In jeder Stufe beträgt das Übersetzungsverhältnis 1/5. Vom Motorgetriebe bis zum Endgetriebe haben wir 41 miteinander verbundene Stufen. Das macht 1/ (5^41) Übersetzungsverhältnis.
Das Motorgetriebe vollendet seine volle Umdrehung in 1/250 einer Minute. Und für den letzten (quadratischen) Gang dauert es (1/250) * (5^41) =1,8x10^26 Minuten!
Das sind 3,03x10^24 Stunden!
Das sind 1,26x10^23 Tage!
Das sind 3,46 x 10^20 Jahre!
Und das sind 346 Quintillionen Jahre!
Schaltpläne
Leute, unsere Stromquelle sind 8 x AA Alkaline Batterien, die in Reihe geschaltet sind. Wir haben einen 6V DC-Motor und 5V Arduino Uno + LCD + Rest der Schaltung. Daher verwenden wir hierfür 2 x LM2596-Regler.In jedem schwarzen Zahnrad haben wir einen Magneten. Wir haben insgesamt 4 Magnete. Direkt daneben befindet sich ein Reedschalter, der mit einer LED und einem Widerstand und dem Arduino Uno-Pin verbunden ist. Wenn der Magnet direkt neben dem Reed-Schalter vorbeigeht, haben wir am Arduino-Pin einen Übergang von hoch zu niedrig zu hoch.
Wir haben ein 2x16 Zeichen LCD, um die Umdrehungszahlen anzuzeigen.

Herstellungsprozess
- Technischer Tipp:Zahnräder
- Infinity-Spiegeluhr
- Was ist eine Getriebewelle?
- Was ist diametraler Abstand?
- Was ist Ganggeschwindigkeit?
- Schrägverzahnung oder schrägverzahnte Zahnstange und Ritzel?
- Was ist eine Planetenuntersetzung?
- Schrägverzahnte Zahnstange für lineare Bewegung
- Zeigen Sie mir ein Inline-Untersetzungsgetriebe
- Was ist ein Spiralreduzierer?