


Machen Sie eine DIY-Hausaufgaben-Schreibmaschine zu Hause
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Notwendige Werkzeuge und Maschinen
 |
|
Apps und Onlinedienste
 |
|
Über dieses Projekt
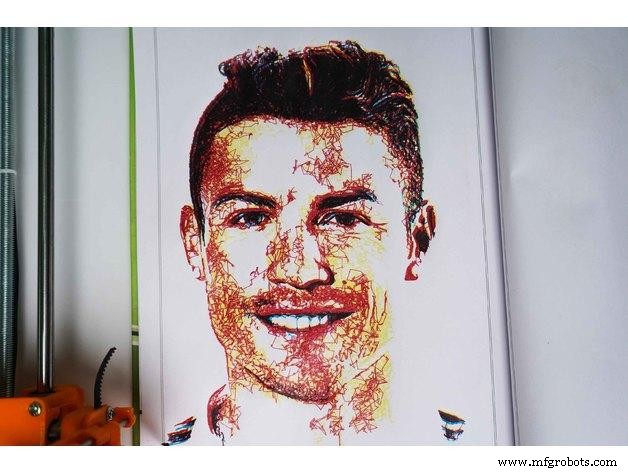
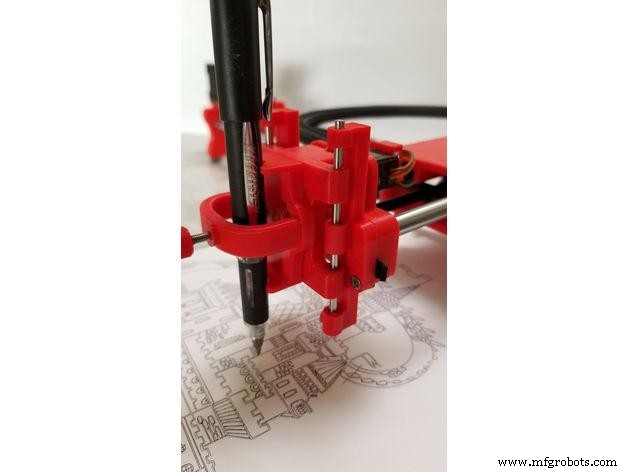
Zeichenroboter/Stiftplotter/Zeichenmaschine ist eine Open-Hardware-Version der berühmten Maschine AxiDraw, bei der es sich um einen Stiftplotter handelt, der auf fast jeder ebenen Oberfläche schreiben oder zeichnen kann. Es kann mit Stiften, Permanentmarkern, Bleistiften und anderen Schreibgeräten schreiben, um eine endlose Vielfalt von Anwendungen zu bewältigen.
Sein einzigartiges Design zeichnet sich durch einen Schreibkopf aus, der über die Maschine hinausragt und es ermöglicht, auf Gegenständen zu zeichnen, die größer als die Maschine selbst sind. Der größte Vorteil der Maschine besteht darin, dass sie aufgrund der XY-Kernausdehnung der Maschine über dem Buch platziert werden kann.
Dieser Zeichenroboter/Stiftplotter/Zeichenmaschine ähnelt dem im Handel erhältlichen AxiDraw. Es wird von einem Arduino Uno-Controller angetrieben, verwendet ein CNC-Shield und eine GRBL-Firmware
Die Kosten für den Bau des Zeichenroboters liegen zwischen 75 US-Dollar, je nachdem, wo Sie Ihre Teile kaufen und ob Sie bereits einige der Teile wie den Arduino besitzen.
Alle meine Projekte findet ihr auf https://www.diyprojectslab.com/
Maximaler Zeichenbereich 24 * 30 CM.
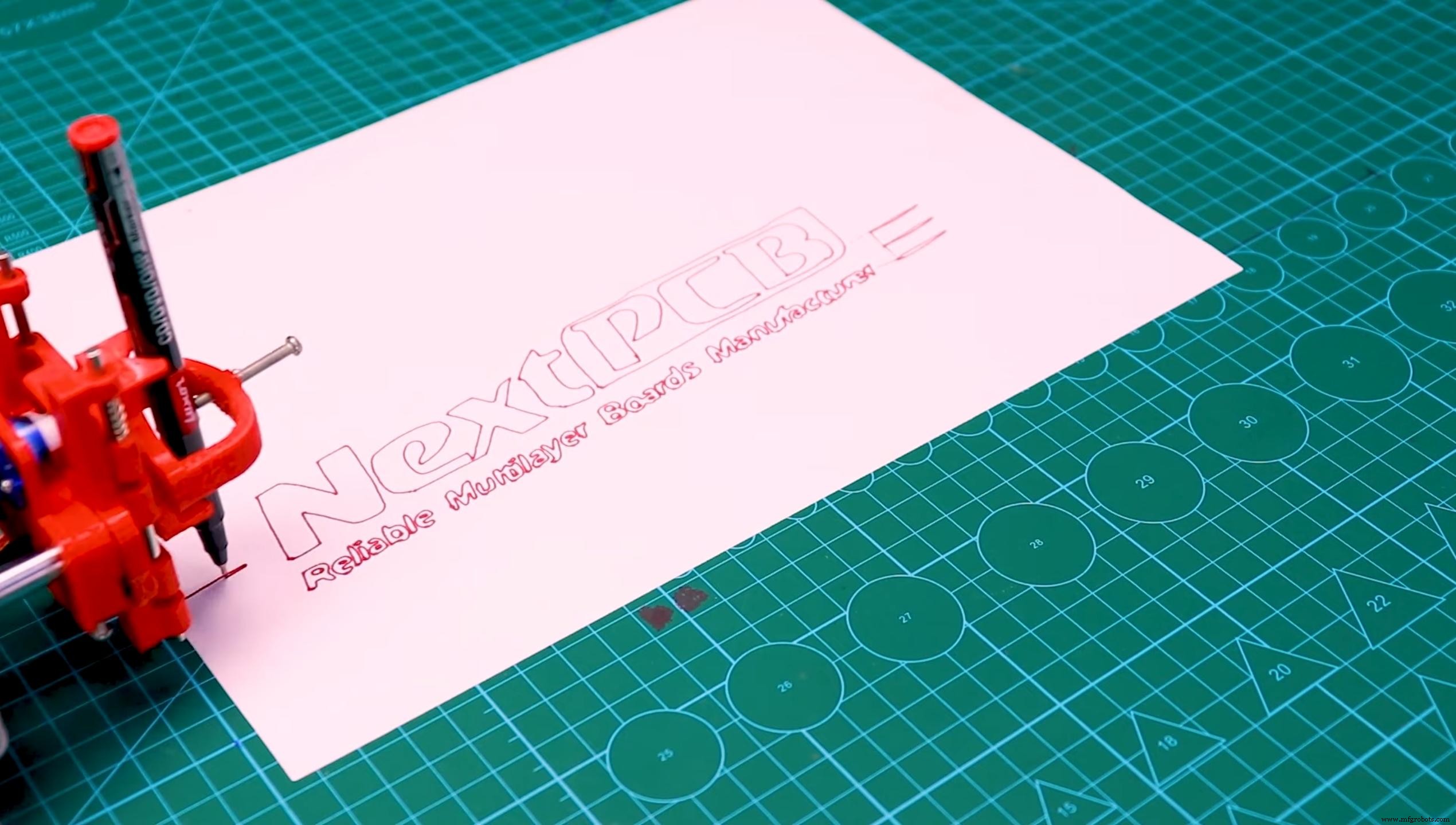
Vielen Dank NextPCB
Dieses Projekt wird dank der Hilfe und Unterstützung von NextPCB erfolgreich abgeschlossen. Leute, wenn Sie ein PCB-Projekt haben, besuchen Sie bitte deren Website und erhalten Sie spannende Rabatte und Coupons.
Kostenloser Versand 0$ PCB Prototyp:https://www.nextpcb.com/pcb-quote?act=2&code=Romeo...
Thanksgiving Christmas Lucky Draw 100% Gewinn:https://www.nextpcb.com/christmas-lucky-draw?code...
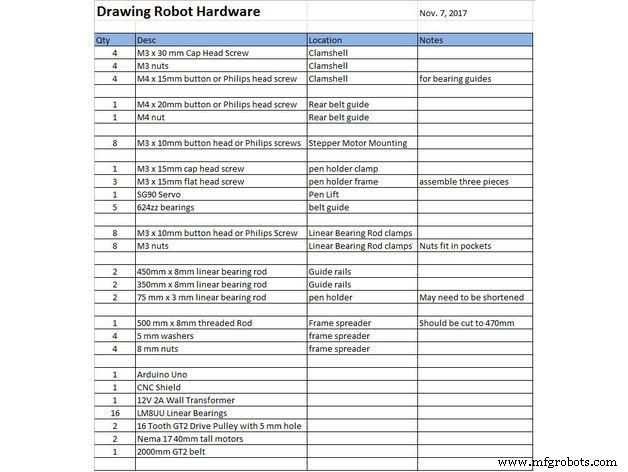
Schritt 1:Benötigte Teile und Materialien

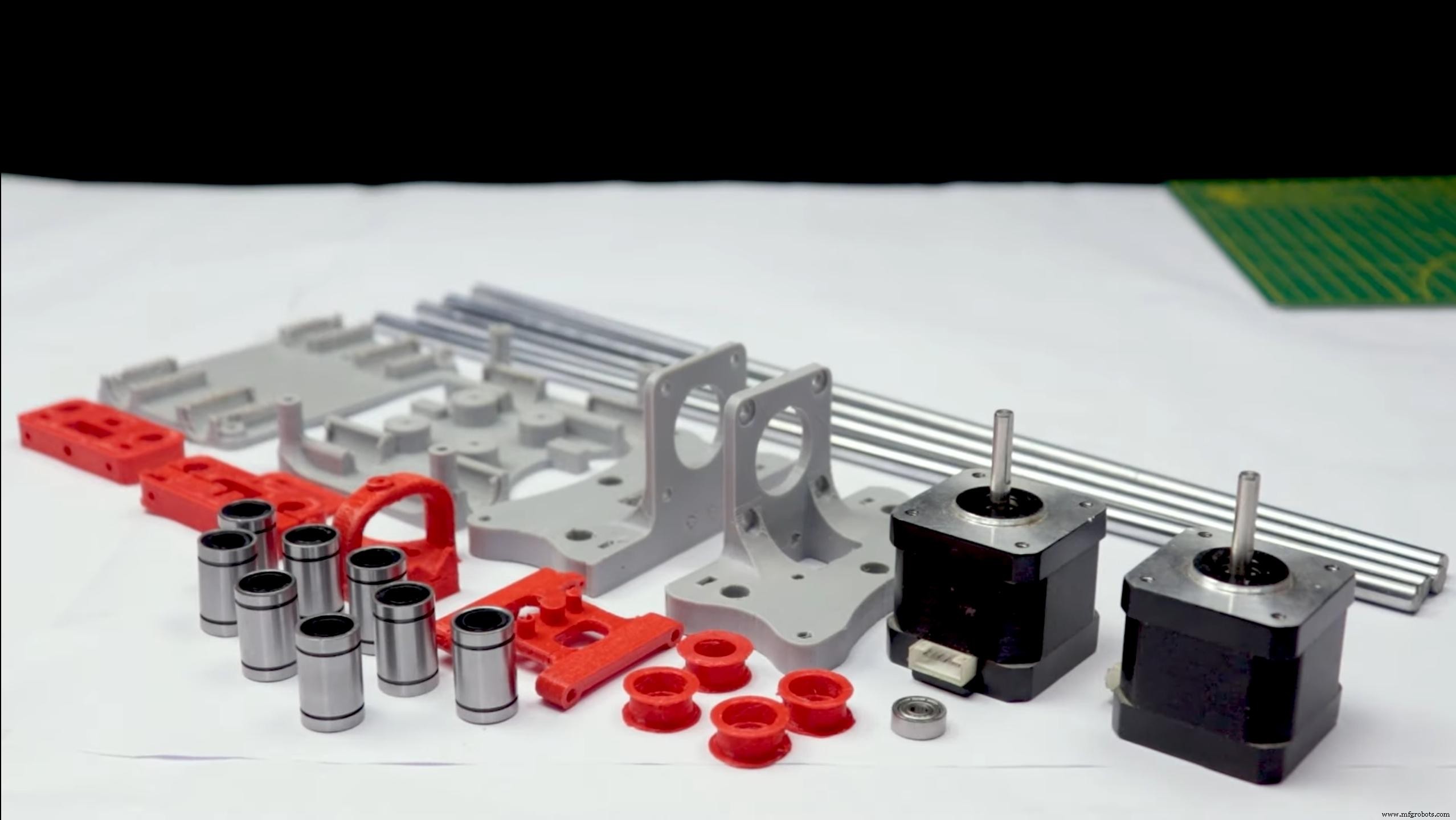
2 x Nema 17 Schrittmotoren Amazon.com
2 x Linearstange M8 x 450 mm für X-Achse Amazon.com
2 x Linearstange M8 x 350 mm für Y-Achse Amazon.com
2 x Linear Rod 3mm für Z-Achse (Sie können es von der alten CDROM bekommen)
1 x Gewindestange M8 x 480 mm8 x LM8UU Lager Amazon.com
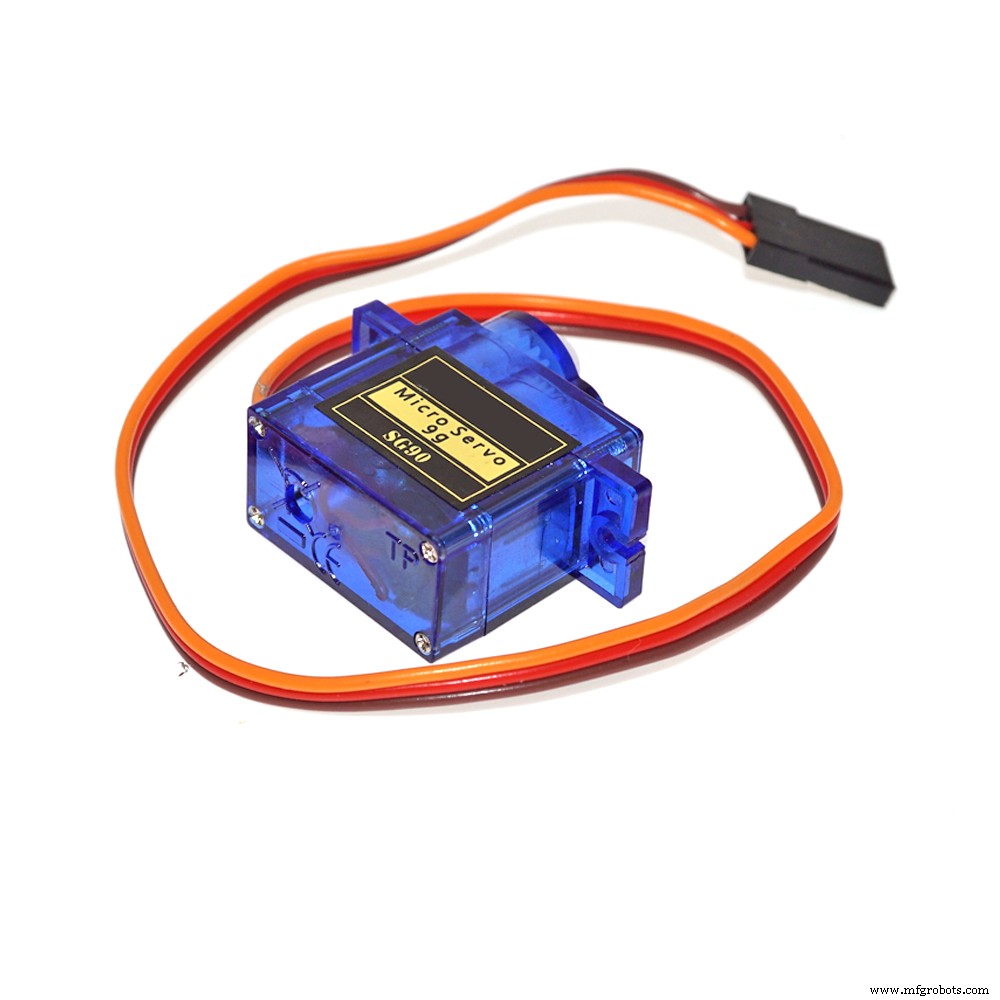
1 x Servo Sg901 x Feder 5m (von Kugelschreiber) Amazon.com
2 x GT2 Riemenscheibe, 16 Zähne Amazon.com
5 x Lager 624zz Amazon.com
1 x 2000mm GT2 Gürtel Amazon.com
1 x Arduino Uno Amazon.com
1 x CNC-Schild Amazon.com
2 x A4988 Stepper-Treiber mit Kühlkörper Amazon.com
6 x Jumper Amazon.com
1 x 12V 2A Netzteil Amazon.com
Nüsse
- 7 x M3-0.5
- 5 x M4-0.7
- 4 x 5/16 Zoll-18
Amazon
Schrauben
- 13 x Phillips M3-0,5 x 16 mm
- 4 x Kreuzschlitz M3-0,5 x 6 mm
- 5 x Phillips M4-0.7x 35mm
- 1 x Sechskant M3-0,5 x 20 mm
Unterlegscheiben
- 4 x 5/16-Zoll-Unterlegscheibe
- 4 x M3-Unterlegscheiben
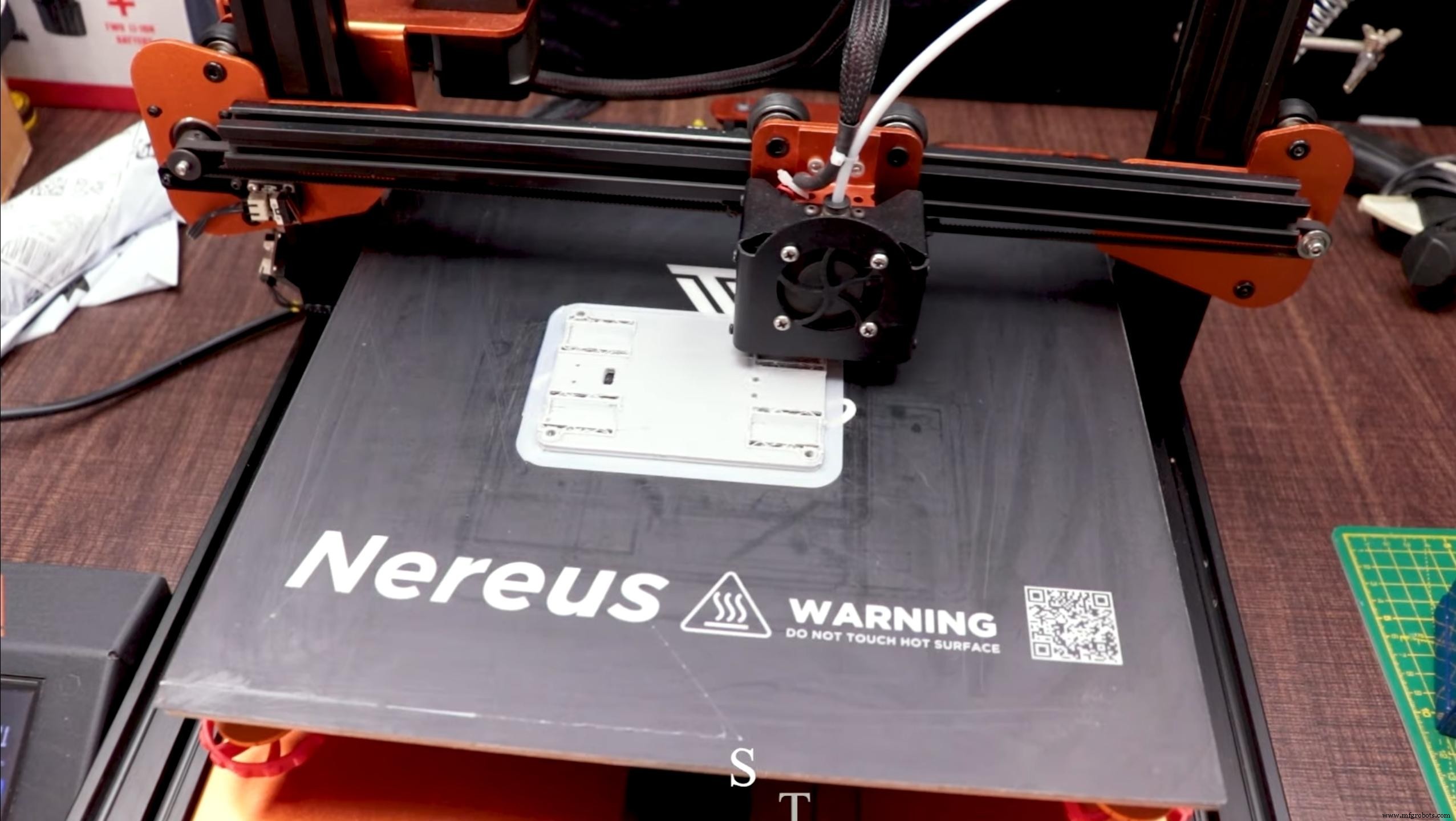
Schritt 2:3D-Druck

Laden Sie die Dateien von Thingiverse herunter
Öffnen Sie die 3D-Modelle in Cura oder einem anderen Slicer.
Verwenden Sie für alle Teile eine Füllung von 75 % (eine Füllung von 70 – 100 % wird auch funktionieren)
Alle Teile mit 0,10 – 0,20 mm Schichthöhe gedruckt
Gedruckt mit PLA
Verwenden Sie Stützen auf dem Stifthalter, Slider, X_Support_L und dem X_Support_R
Hinweis:Der längste Teil dauerte etwa 10 Stunden und der kürzeste 30 Minuten zum Drucken
PLA ist für dieses Design in Ordnung. Ich drucke bei 200C auf BuildTak. Keines der Teile erfordert Flöße oder Krempen. Ich schlage Stützen nur für den Stifthalter und die stehende Z-Achsen-Endplatte vor.
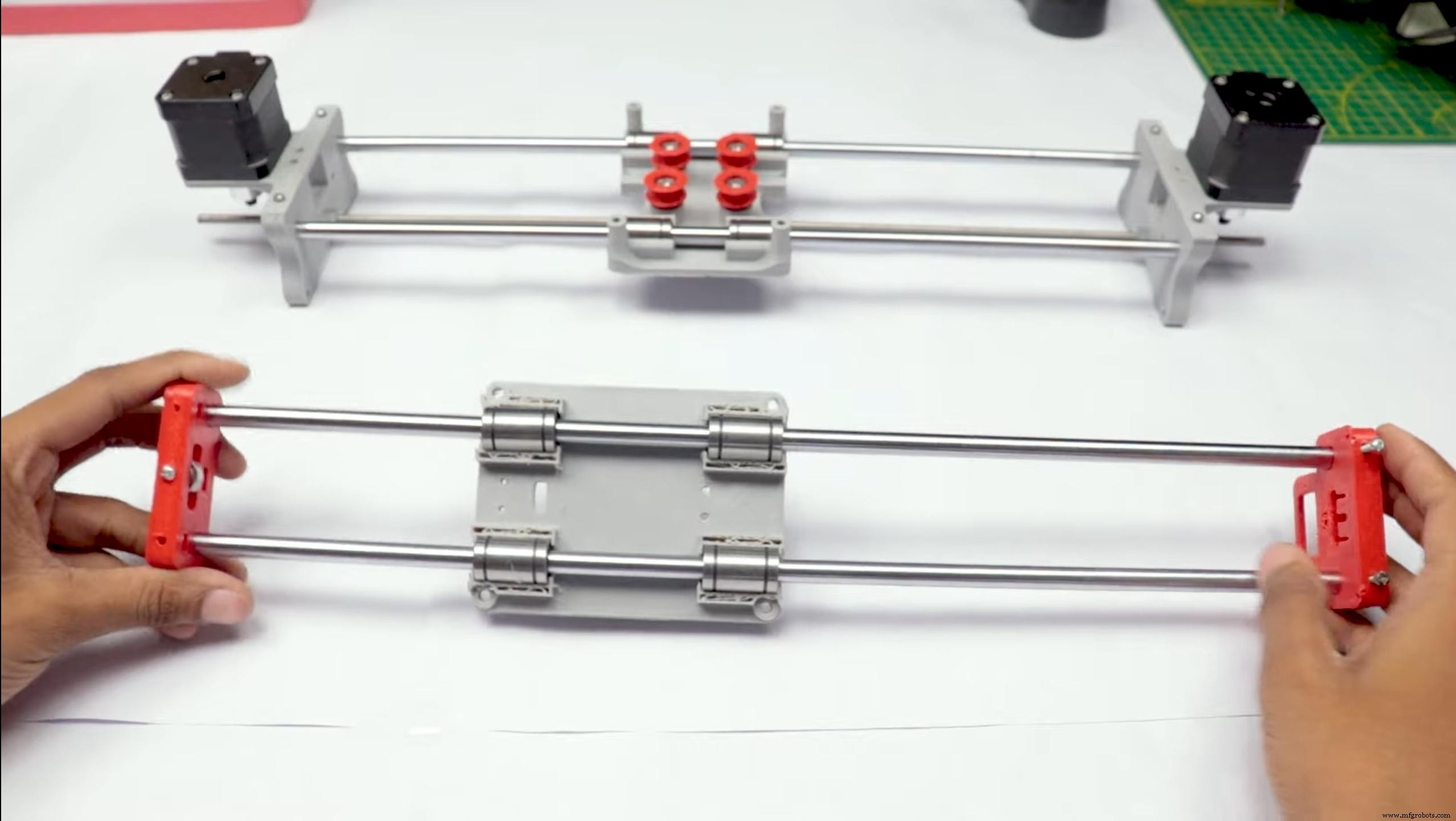
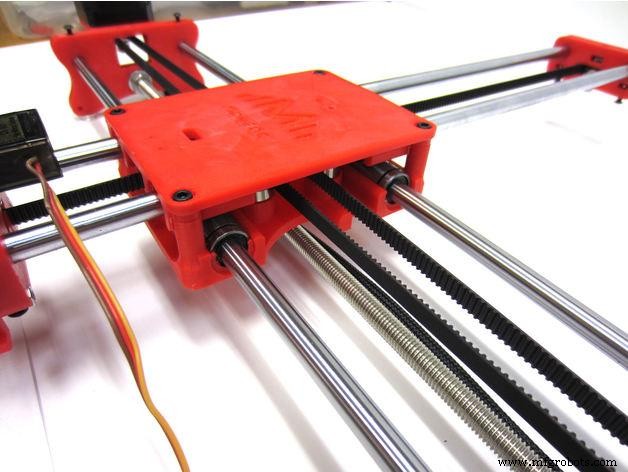
Schritt 3:Montieren Sie die X-Achse
Denken Sie daran, dass Sie (2) 350 mm und (2) 450 mm lange Linearstäbe benötigen
Nehmen Sie die (2) 450 mm Linearstangen und stecken Sie sie in eines der x-support-Teile ein
- Verwenden Sie möglicherweise eine runde Feile, um die Löcher zu glätten, in die Sie sie einsetzen
- Sie können auch einen Gummihammer verwenden, um die Stangen einzuführen
Nehmen Sie nun die Gewindestange und stecken Sie sie in das darunter liegende Loch. Führen Sie eine 5/16-Zoll-Unterlegscheibe und eine 5/16-Zoll-Mutter auf beiden Seiten des x-Stützteils ein
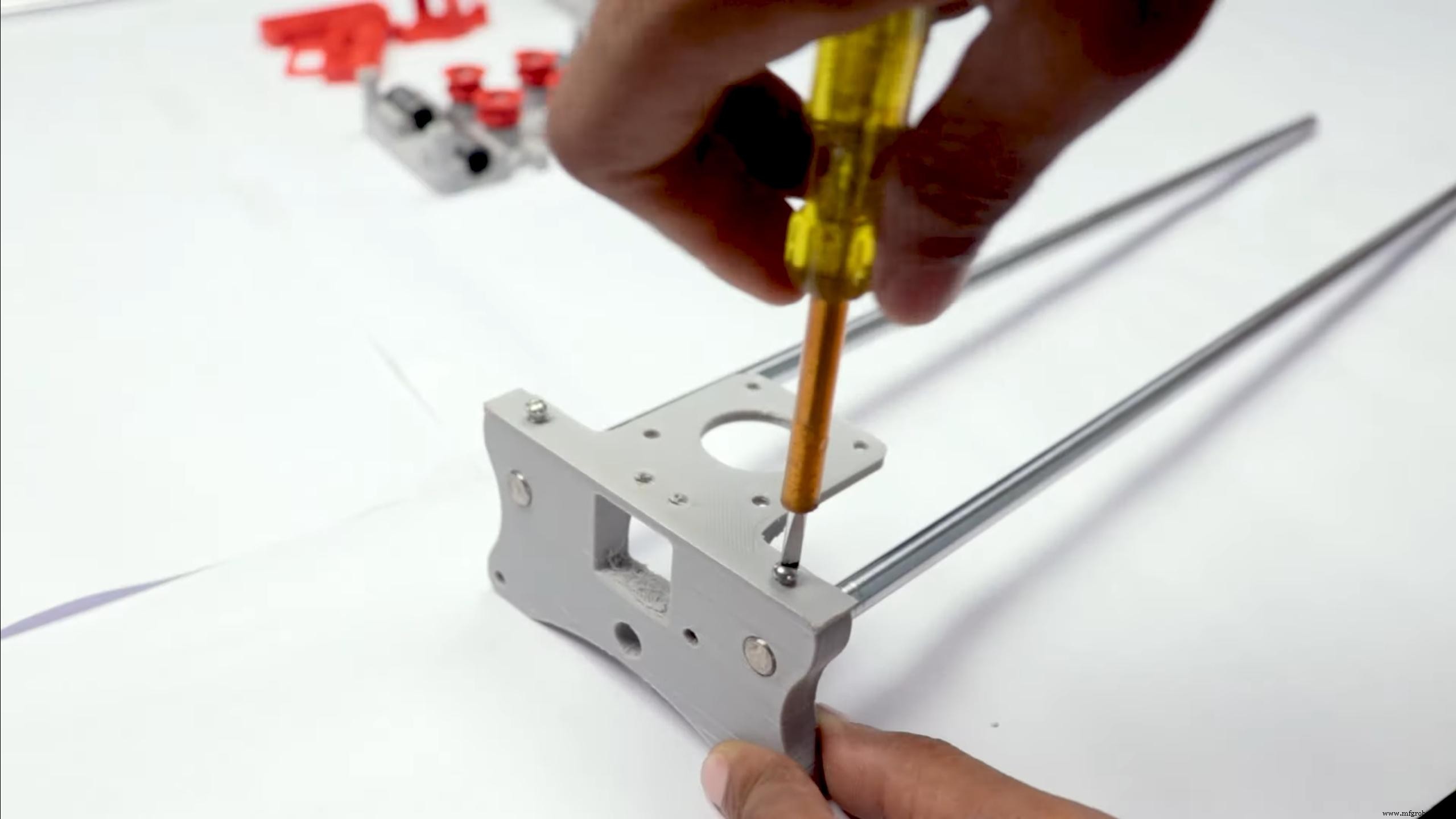
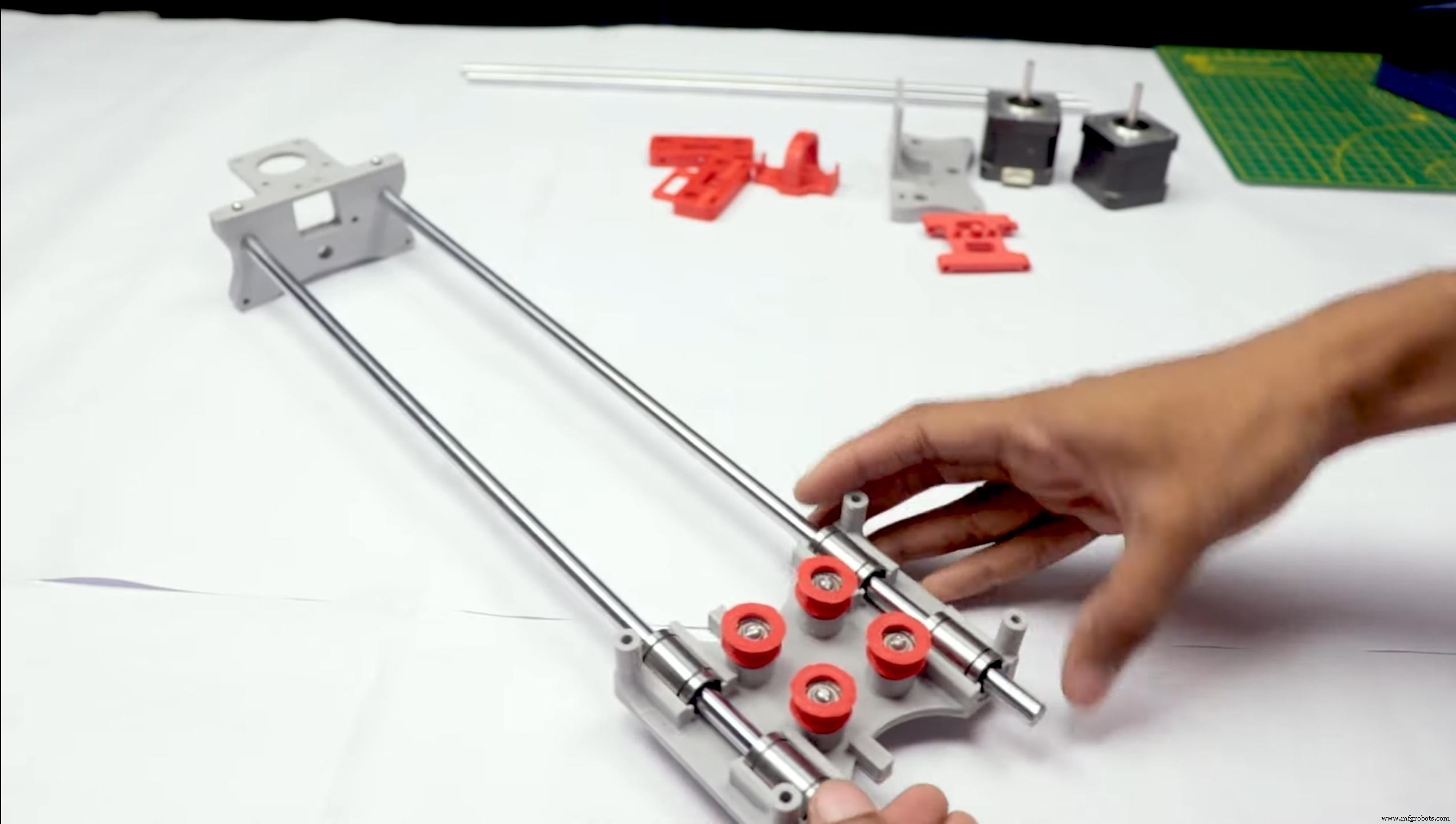
Schritt 4:Montieren Sie das X-Achsen-Lager


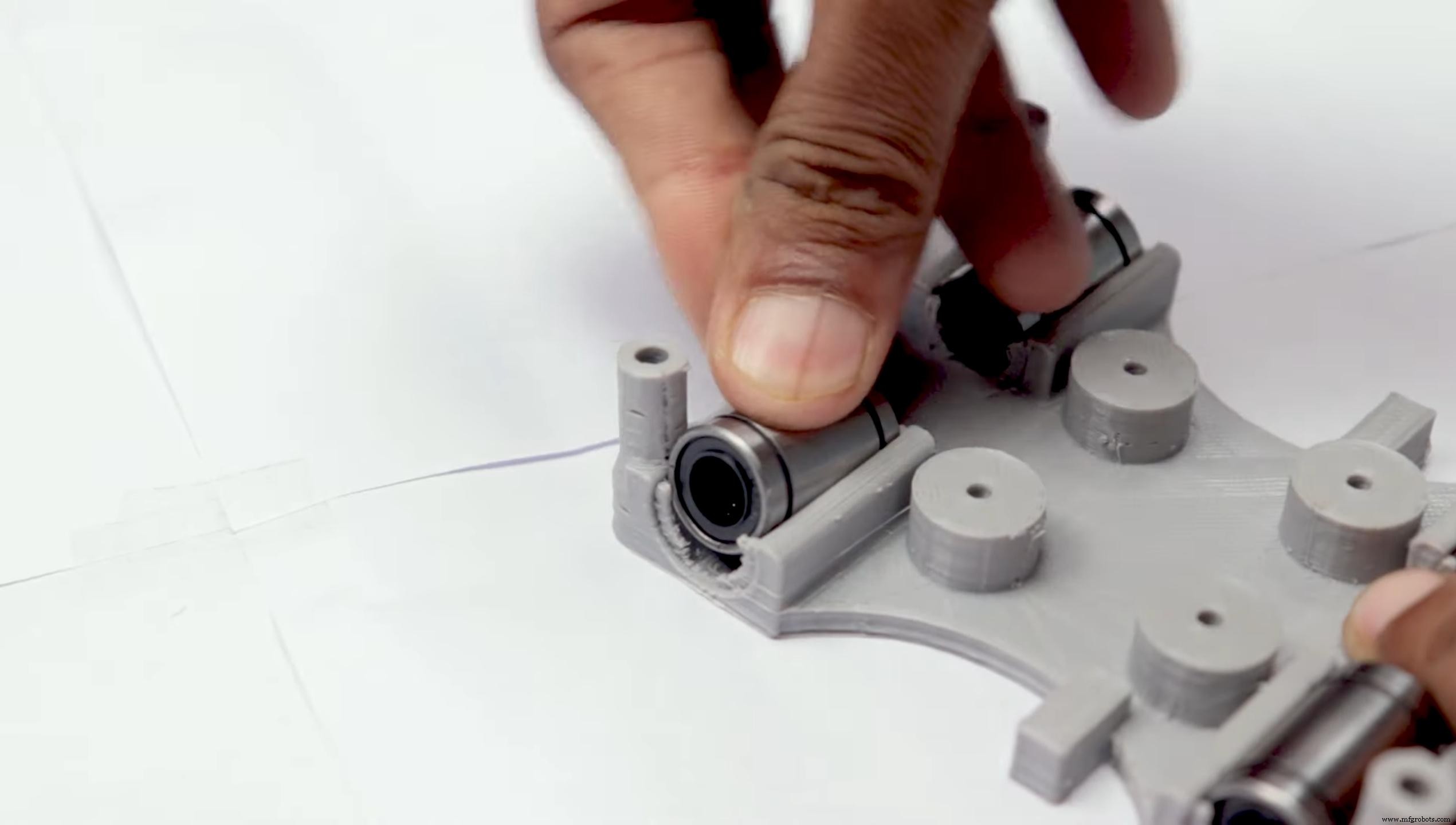


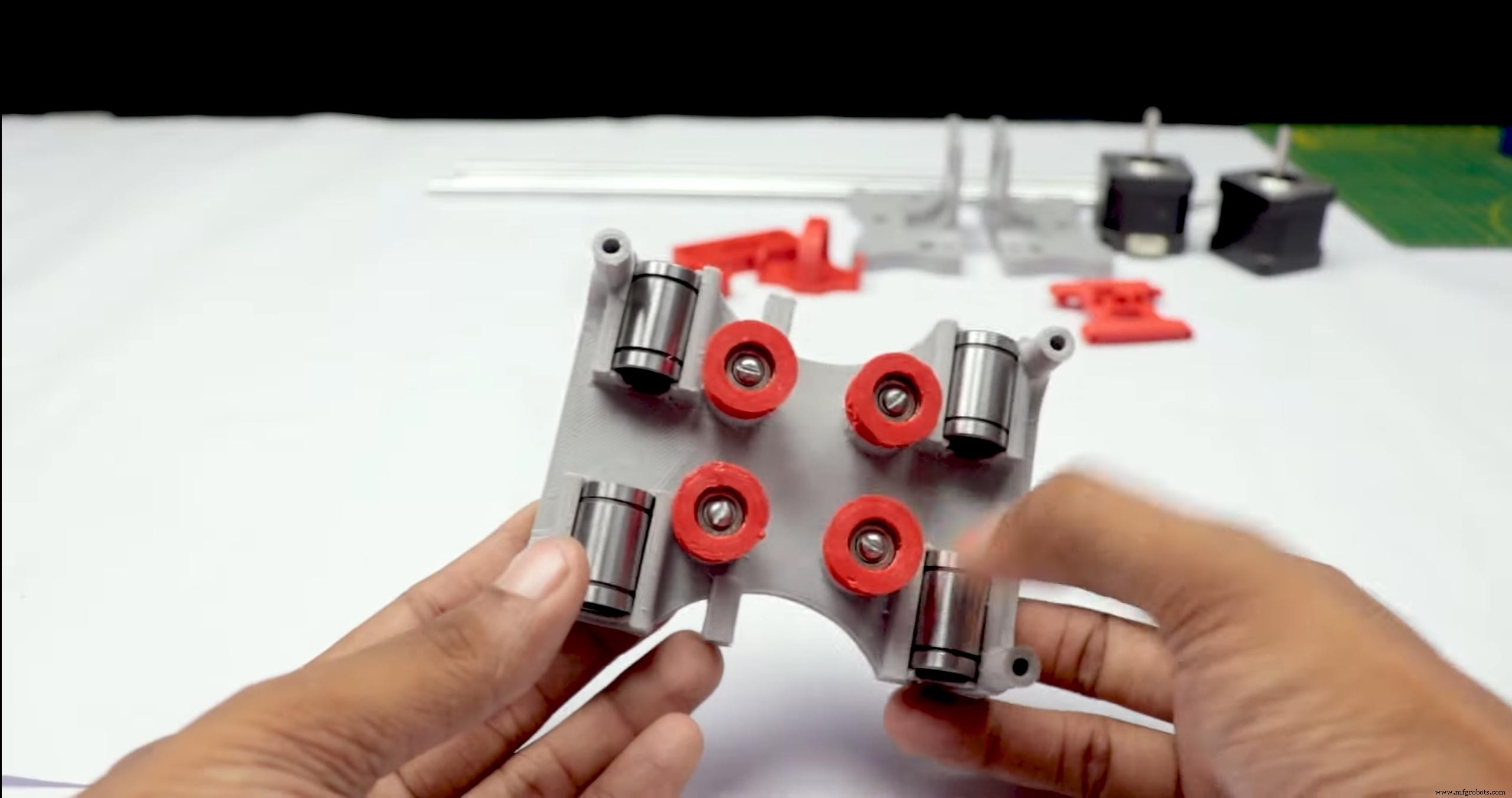
Jetzt möchten Sie die LM8UU-Lager an ihren Platz auf der oberen und unteren Clamshell schieben (Die obere und untere Clamshell nehmen jeweils (4) Lager auf)
Nehmen Sie (4) 624zz-Lager und schieben Sie sie durch die 3D-gedruckten Umlenkrollen. Lassen Sie das 5. Lager für später, wenn Sie die Y-Achse montieren
Montieren Sie die X-Achse (Wagen)
- Besorgen Sie sich (4) M3-0,5 x 20 mm Schrauben, (4) M3-Muttern, (4) M3-Unterlegscheiben und (4) 624zz-Lager mit installierten Umlenkrollen
- Nehmen Sie eine Schraube und führen Sie eine Unterlegscheibe durch, die Unterlegscheibe wird auf dem Lager aufliegen. Die Mutter befindet sich an der Unterseite des Schlittens, wodurch das Lager in Position gehalten wird
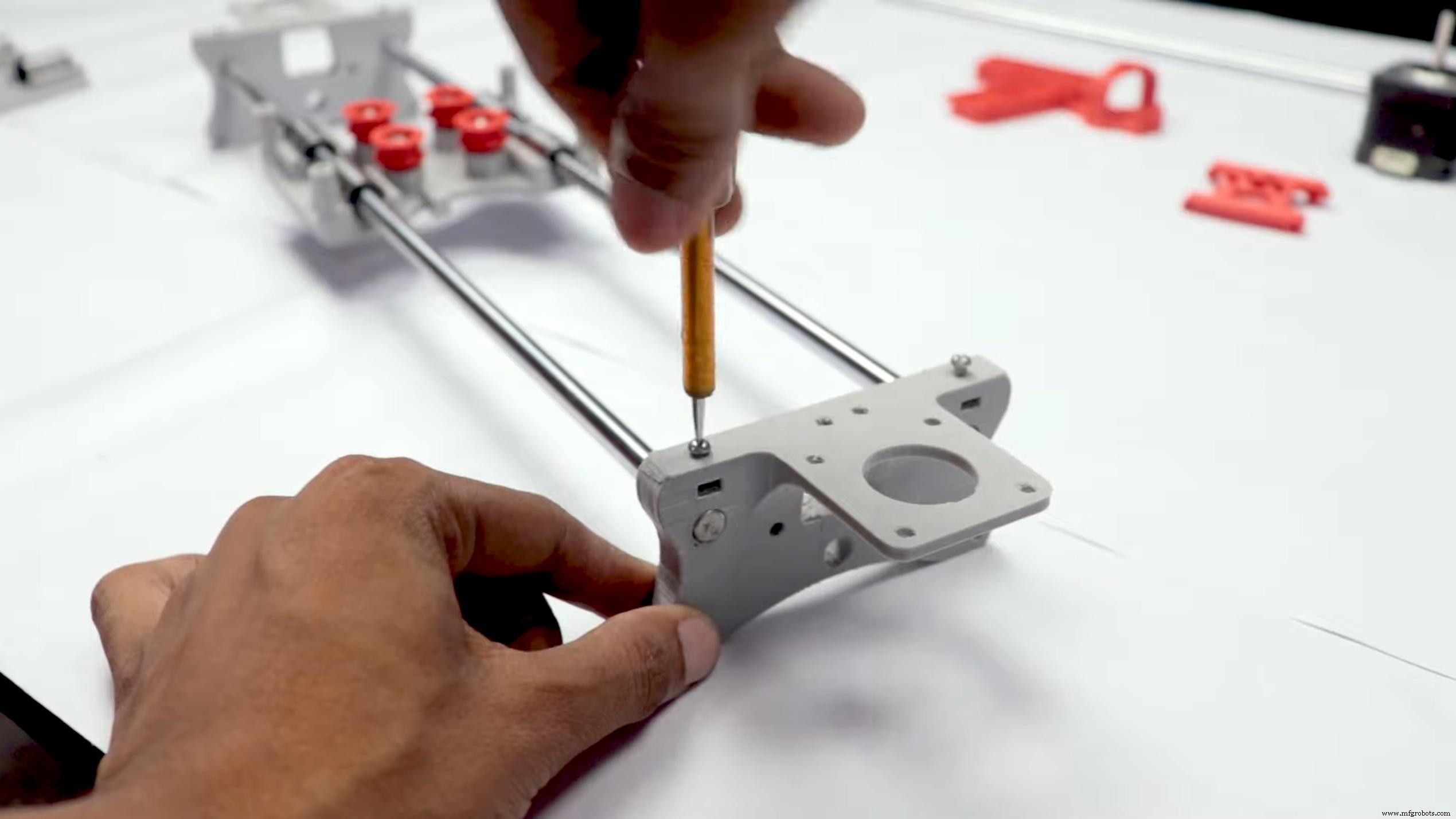
Montieren Sie die X-Achse (X-Unterstützung)
- Schieben Sie die Clamshell durch die 450 mm (X-Achse) linearen Stangen
- Verwenden Sie erneut einen Gummihammer, um die letzte X-Stütze an den Linearstangen zu befestigen
- Achten Sie darauf, dass die Stäbe auf beiden Seiten gleich herausragen
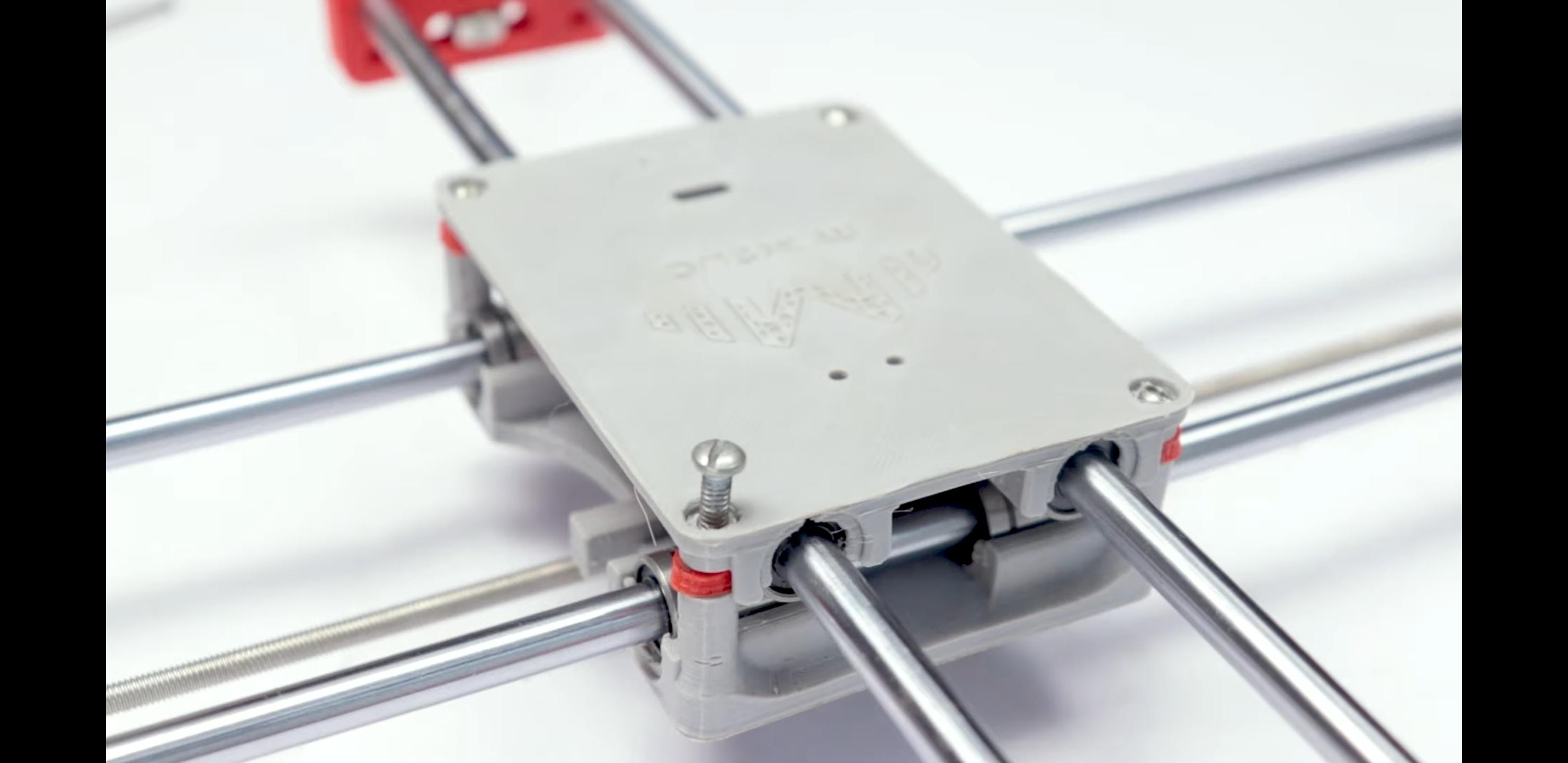
- Schieben Sie das andere Ende der Gewindestange durch das Loch an der X-Stütze
- Legen Sie den letzten Satz Muttern und Unterlegscheiben an, um die X-Stütze in Position zu halten
- Jetzt, da die X-Achse fertig ist, können Sie (2) Kreuzschlitzschrauben M3-0,5 x 16 mm pro X-Stütze verwenden, um zu verhindern, dass die Linearstangen verrutschen
Schritt 5:Montieren Sie die Y-Achse
Y-Zurück
- Nehmen Sie die (2) 350-mm-Linearstangen und führen Sie sie mit einem Gummihammer in das Y-Rückenstück ein
- Holen Sie sich (1) M4-0,5 x 35-Schraube, (1) M4-Mutter und das 5. 624zz-Lager
- Besorgen Sie sich (2) M3-0,5 x 16 Schrauben, um die Linearstangen zu befestigen
- Schieben Sie das Lager ein, wenn Sie die Schraube durch das Y-Rückenstück einführen
Y-Front
- Schieben Sie die Linearstangen/das Y-Rückenstück durch die LM8UU-Lager und befestigen Sie das Y-Frontstück mit einem Gummihammer
Schritt 6:Montieren Sie die X-Y-Achse (Riemen)
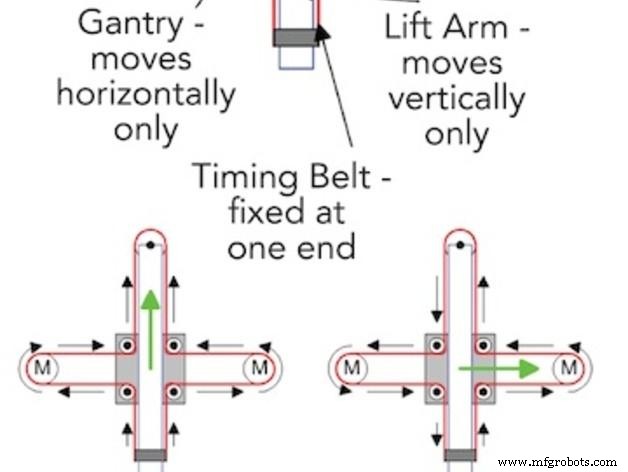

- Verwenden Sie eine Spitzzange, um den GT2-Riemen leichter durch die Muschel zu führen
- Nehmen Sie die beiden Enden des Gürtels und schieben Sie sie durch die "Zähne" des Basisschiebers
- Der Gürtel sollte eng anliegen und nicht locker sein
- Beachten Sie, dass es normal ist, dass sich die Clamshell nach dem Anlegen des GT2-Gurts nicht leicht bewegt
Schritt 7:Montieren Sie die Z-Achse

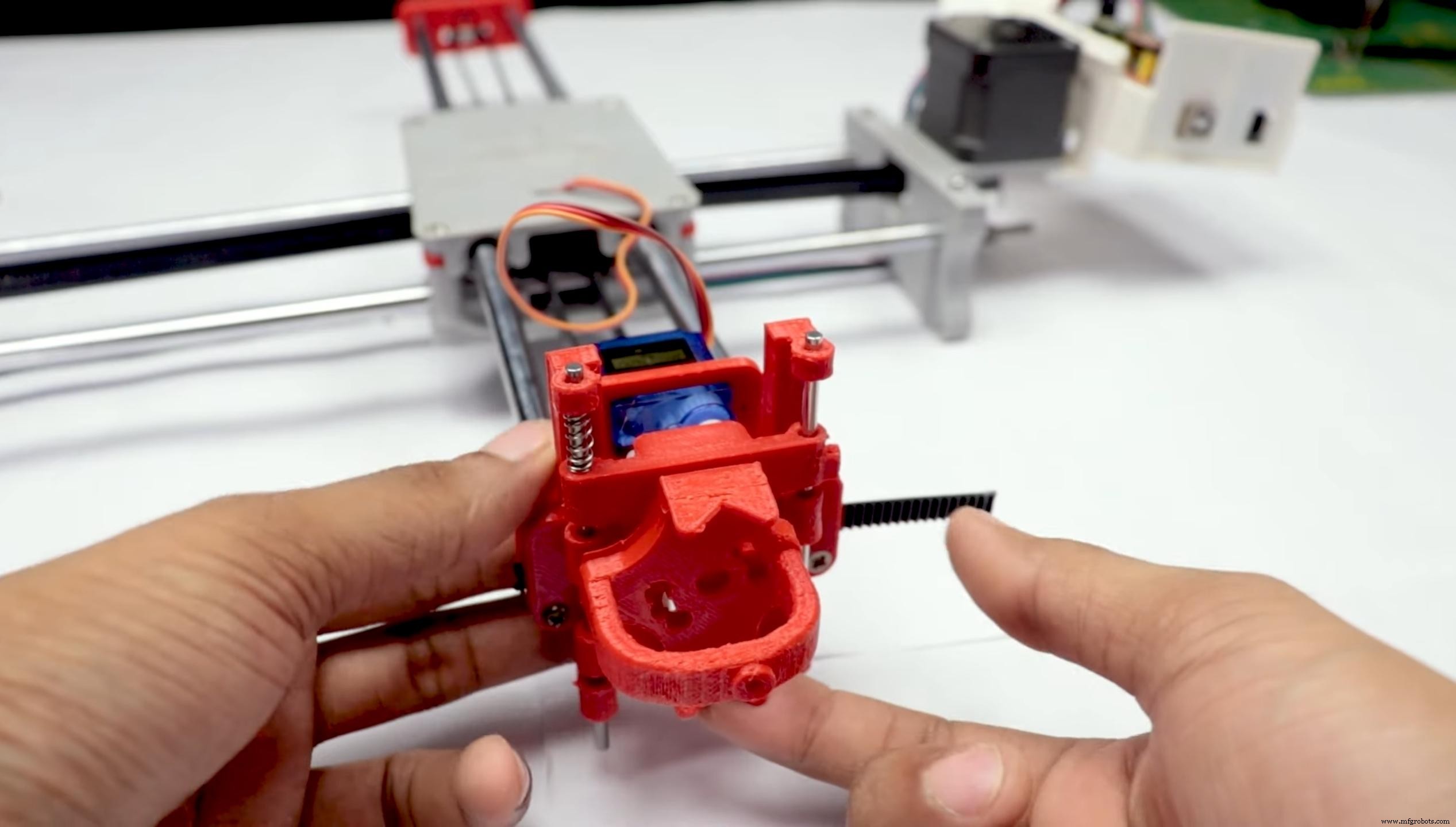
- Besorgen Sie sich (2) lineare 3 mm-Stäbe und die folgenden 3D-gedruckten Teile (Schieber, Stifthalter, Basisschieber, metrische 3 mm-Rändelschraube)
- Holen Sie sich (1) Sechskantschraube M3-0,5 x 20 mm und die metrische Flügelschraube und schieben Sie sie zusammen. Verwenden Sie Sekundenkleber, um es zusammenzuhalten.
- Besorgen Sie sich (3) M3-0,5 x 16 mm Schrauben, mit denen Sie den Basisschlitten am Y-Frontteil befestigen. Möglicherweise müssen Sie (3) M3-0,5 Muttern verwenden, um es in Position zu halten
- Drücken Sie den Schieberegler und den Stifthalter zusammen, um ein Stück zu erhalten
- Nehmen Sie nun das neue Teil und die (2) 3 mm linearen Stangen und schieben Sie die Stangen durch die Löcher. Legen Sie eine kleine Feder zwischen die beiden Teile, damit ein wenig Druck entsteht, um den Slider anzuheben. Eventuell müssen Sie die Feder etwas kürzen, bis ausreichend Druck auf den Schieber ausgeübt wird.
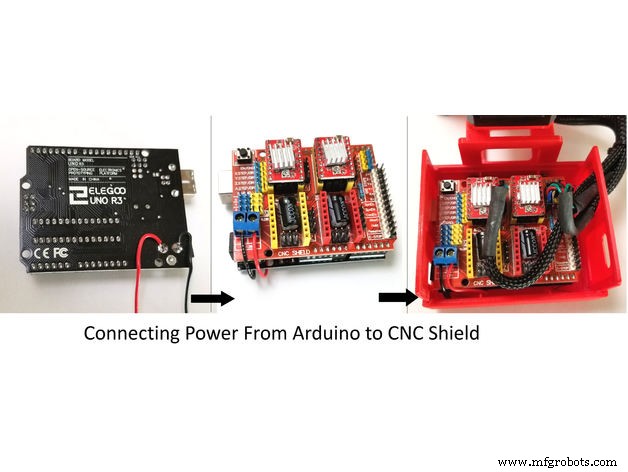
Schritt 8:ELEKTRONIK
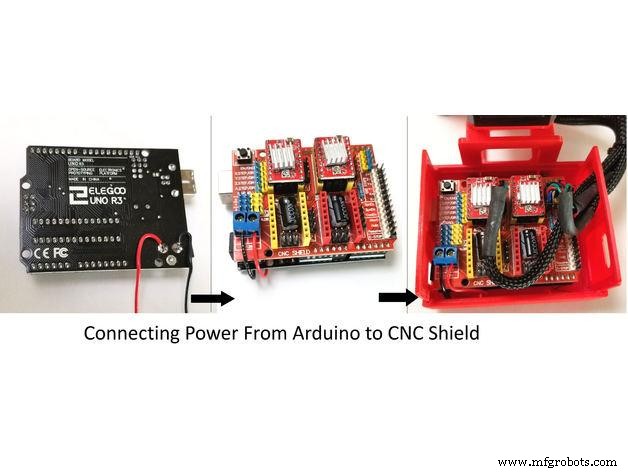
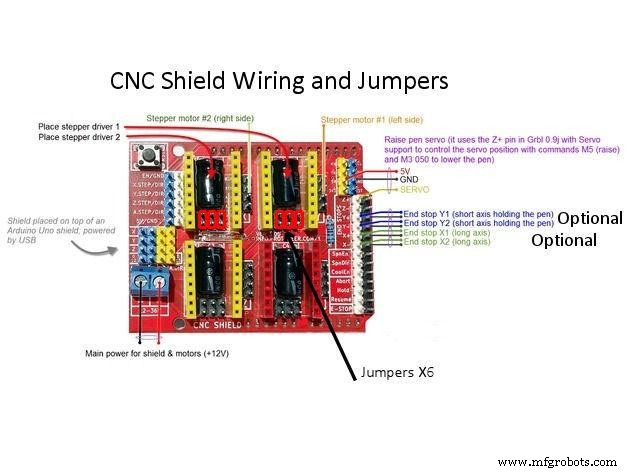

ELEKTRONIK
Ich bevorzuge, dass Sie Arduino uno CNC Shield verwenden können
Bereit für deinen Rundgang
1) 4 Stück A4988 Schrittmotortreiber
2) Erweiterungsplatine A4988 Treiber
3) Arduino UNO Nehmen Sie zuerst den Hit Sink und kleben Sie den A4988-Motortreiber auf.
4 Stück A4988 Schrittmotortreiber an die Erweiterungsplatine A4988 Treibermodul anschließen, dann das Arduino mit der Erweiterungsplatine verbinden und alle Kabel anschließen tun würden, können wir die Motoren um 1/16 oder 1/32 eines Schrittes bewegen, um den Laser mit der maximal möglichen Präzision zu bewegen. Die Motoren verbrauchen jedoch mehr Strom:Sie werden schneller heiß.
Um die Mikroschrittmodi zu verwenden, schließen Sie einige der Modusstifte kurz. Unterschiedliche Kombinationen ergeben unterschiedliche Auflösungen. Sehen Sie sich die Tabelle für die verschiedenen möglichen Konfigurationen an. Wenn die Abschirmung programmiert ist, fügen Sie die A4988-Treiber hinzu und verdrahten Sie den Rest der Elektronik.
Um die Spulen der Schrittmotoren zu finden, verwenden Sie ein Multimeter. Wenn zwischen den beiden Drähten ein Widerstand auftritt, haben Sie eine Spule. Auf dem Schaltplan werden die Spulen durch zwei Drähte derselben Farbe dargestellt.
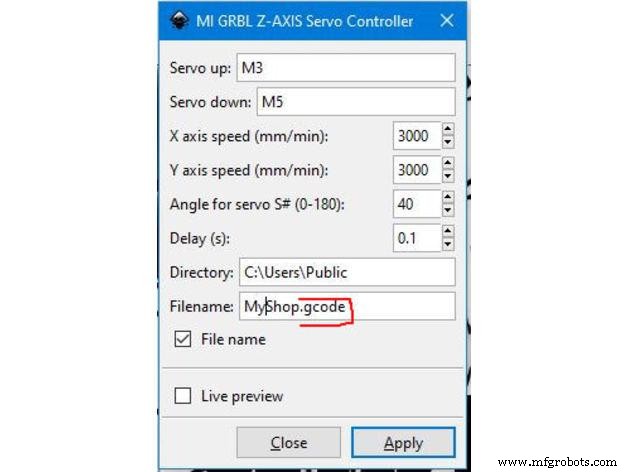
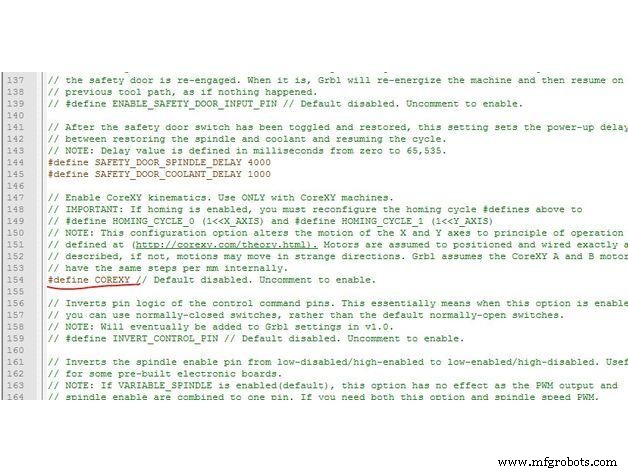
Schritt 9:SOFTWARE
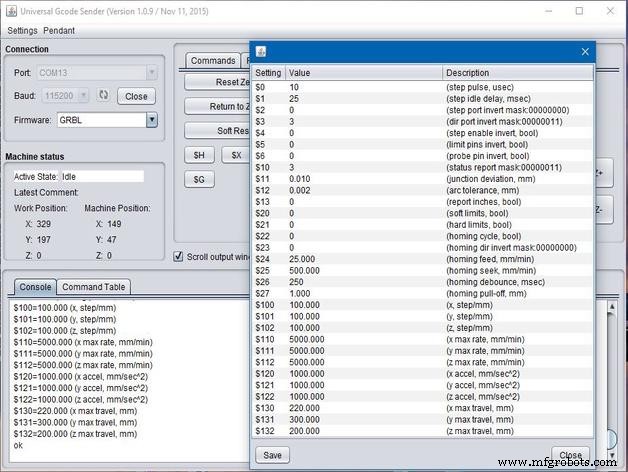
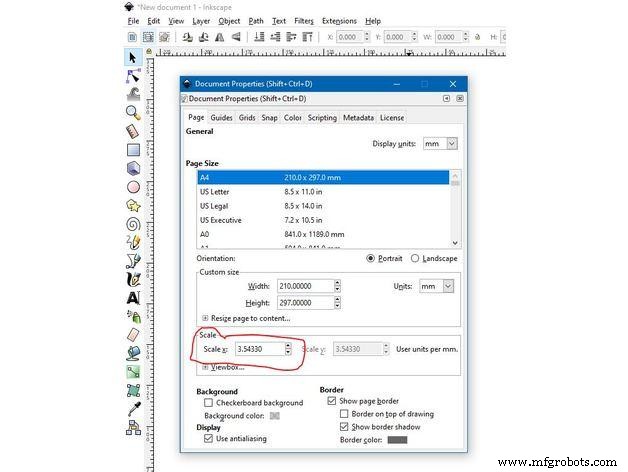
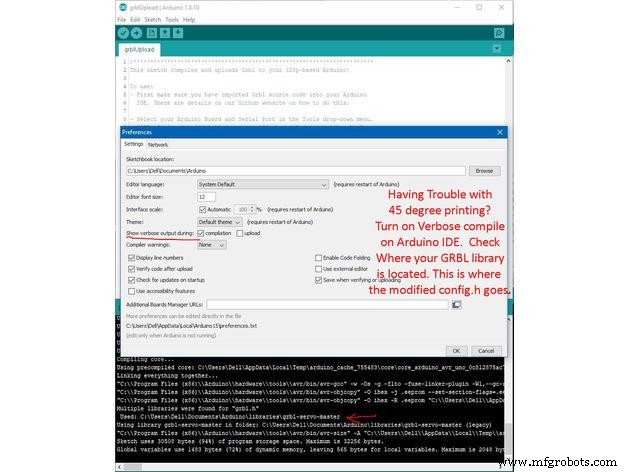
Inkscape, die Grafikdesign-Software (Grafiken zeichnen oder importieren)
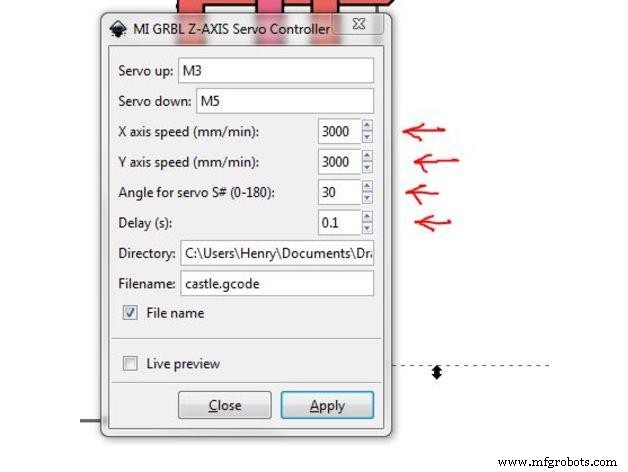
Inkscape MI GRBL-Erweiterung (Grafiken in G-Code konvertieren)Universeller G-Code-Sender (sendet den G-Code an den Roboter, der eine Zeichenbewegung verursacht)GRBL, die Arduino-Firmware (in Arduino Uno programmiert)
Arduino:https://www.arduino.cc/en/software
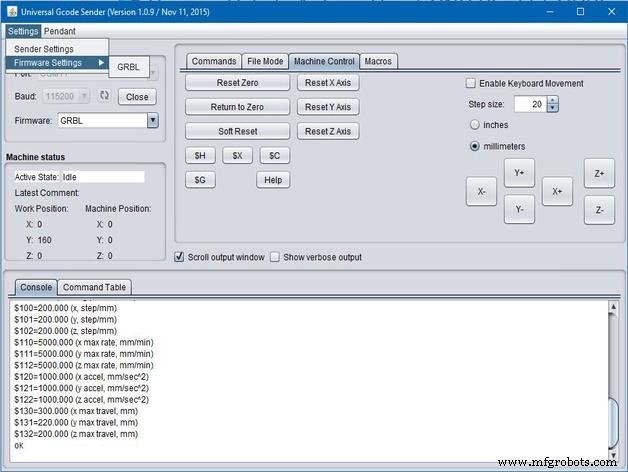
Universeller G-Code-Sender:https://winder.github.io/ugs_website/...
Inkscape:https://inkscape.org/release/inkscape..
4xiDraw &km-Laser:https://drive.google.com/file/d/1YO8-...
Verarbeitung:https://processing.org/download/
Zeichnung zur G-Code-Verarbeitung:https://drive.google.com/file/d/1PIFx...
Sehen Sie sich das Video für die vollständige Einrichtung an
Schritt 10:Zeichenmaschine bei der Arbeit
Code
- grbl-Code
grbl-CodeArduino
Schaltpläne
Herstellungsprozess
- Linienfolger-Roboter
- Arduino-Schulungsplattform
- Autonomer Heimassistent-Roboter
- CNC-Maschine
- DIY Arduino Roboterarm – gesteuert durch Handgesten
- Heimmonitor
- Wie man mit Arduino Nano zu Hause ein Mini-Oszilloskop herstellt
- DIY-Idee mit RFID
- Selbstgemachte Klauenmaschine
- Arduino CNC-Plotter (Zeichnungsmaschine)