


Arduino Trash-Bot (Papierkorb automatisch öffnen/schließen)
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 |
Apps und Onlinedienste
 |
|
Über dieses Projekt
Alles wird klüger, oder? Warum also nicht Ihr Mülleimer? Dieser Mülleimer öffnet und schließt seinen Deckel, wenn er Müll vor sich sieht. Sie müssen nur den Müll dorthin bringen und er öffnet sich automatisch und wartet darauf, dass Sie ihn mehr füttern, dann schließt er sich nach einer gewissen Verzögerung automatisch. Sehen Sie sich das Video an, um genau zu sehen, was es kann.
Fangen wir an.
Schritt 1:Komponenten



(2 weitere Bilder)
- Arduino Uno (jedes Board)
- Servomotor (ich verwende Mikroservo sg90)
- HCSR04 Ultraschallsensor
- Servoarme (neben dem Servo in Bild 2)
- Karton (nur ein Stück in Scheiben schneiden)
- Mülleimer
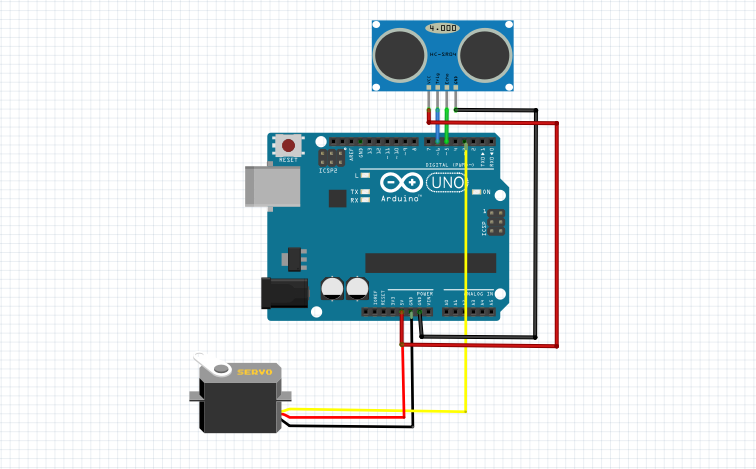
Schritt 2:Bauen Sie die Schaltung auf
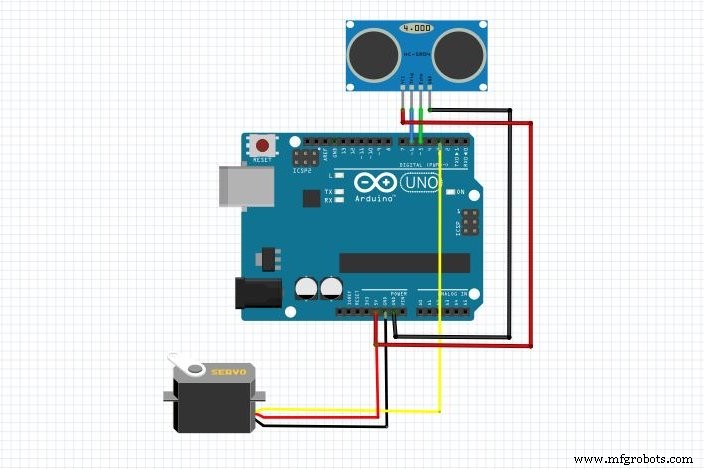
Die Schaltung ist so einfach. Da das Servo und das Sonar nur weniger Strom benötigen, können Sie sie einfach direkt von der Arduino 5V-Quelle mit Strom versorgen. Denken Sie daran, den Arduino mit mehr als 7,4 V DC oder mindestens 7 V zu versorgen.
- Servodaten (gelb) an Pin 3 von Arduino
- Servo vcc (rot) auf 5V von Arduino
- Servomasse (schwarz/grau) zu Arduino Gnd
- Sonarsensor-Trigger für Arduino 6
- Echo des Sonarsensors zu Arduino 5
- Vcc zu Arduino 5v
- Gnd zu Arduino Gnd
Schritt 3:Verbinden Sie den Servoarm



Nehmen Sie einfach diesen Servoarm und verbinden Sie ihn mit Heißkleber oder anderen Klebstoffen mit einem langen Pappstück. Anstelle von Pappe können Sie auch Eiscreme-Sticks verwenden. Verbinden Sie dann den langen Servoarm mit dem Servomotor.
Schritt 4:Servo- und Sonarsensor zum Papierkorb hinzufügen



Verbinden Sie den Sonarsensor so mit der Vorderseite nach oben zum Behälter. Und dann fügen Sie den Servomotor wie folgt auf Bild 2 &3 hinzu, damit sich das Servo nach oben drehen kann.
Schritt 5:Der Code
Code-Link:https://github.com/ashraf-minhaj/Trash-bot
Ich habe den Arduino so programmiert, dass wenn er in einem Bereich von 50 cm Müll (buchstäblich alles) sieht, das Servo auf 50 Grad geht und auf den oberen Deckel des Behälters trifft, so dass der obere Deckel geöffnet wird, drei Sekunden wartet, dreht sich dann automatisch auf 160 Grad und somit wird der obere Deckel geschlossen. Jetzt sehen Sie also einen automatischen Trash-Bot zum Öffnen/Schließen.
#includeServoservo;int const trigPin =6;int const echoPin =5;void setup(){pinMode(trigPin, OUTPUT); pinMode (echoPin, EINGANG); servo.attach (3);}void loop () { int Dauer, Distanz; digitalWrite (trigPin, HIGH); delay(1);digitalWrite(trigPin, LOW); // Messen Sie den Impulseingang in Echo pinduration =pulseIn(echoPin, HIGH); // Distance ist die Hälfte der Dauer geteilt durch 29,1 (aus Datenblatt) Distance =(duration/2) / 29.1; // wenn Entfernung weniger als 0,5 Meter und mehr als 0 (0 oder weniger bedeutet Reichweitenüberschreitung) if (Entfernung <=50 &&Entfernung>=0) {servo.write (50); delay(3000);} else { servo.write(160);}
Schritt 6:Sie sind fertig

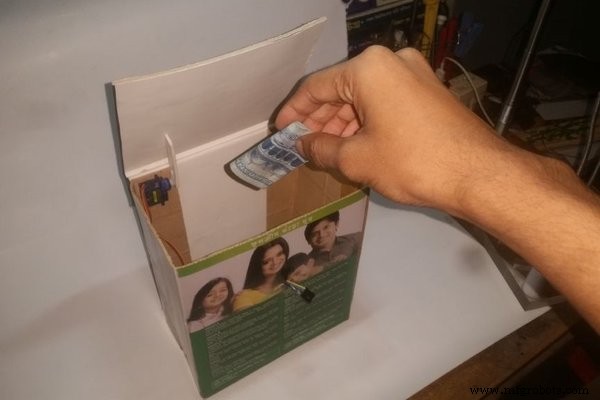
Versorgen Sie jetzt den Arduino einfach mit mehr als 7 V und Sie haben einen Mülleimer-Roboter.
Danke.
[Wenn dir meine Arbeit gefällt, unterstütze mich bitte, indem du meinen YouTube-Kanal abonnierst]
Code
- Arduino-Trash-Bot-Code
arduino-Trash-Bot-CodeC/C++
#includeServoservo;int const trigPin =6;int const echoPin =5;void setup(){pinMode(trigPin, OUTPUT); pinMode (echoPin, EINGANG); servo.attach (3);}void loop () { int Dauer, Distanz; digitalWrite (trigPin, HIGH); delay(1);digitalWrite(trigPin, LOW); // Messen Sie den Impulseingang in Echo pinduration =pulseIn(echoPin, HIGH); // Distance ist die Hälfte der Dauer geteilt durch 29,1 (aus Datenblatt) Distance =(duration/2) / 29.1; // wenn Entfernung weniger als 0,5 Meter und mehr als 0 (0 oder weniger bedeutet Reichweitenüberschreitung) if (Entfernung <=50 &&Entfernung>=0) {servo.write (50); delay(3000);} else { servo.write(160);}// 60 ms warten schadet niemandemdelay(60);}
Schaltpläne
Arduino-Trash-Bot-Code
https://github.com/ashraf-minhaj/Trash-botHerstellungsprozess