


Bolzengesteuertes Roboterauto
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Apps und Onlinedienste
 |
| |||
 |
|
Über dieses Projekt
Haftungsausschluss:
Bei der Herstellung dieses Projekts wurde keine Elektronik beschädigt.
Erster Akt:Eines schönen Tages...
Wir arbeiteten seit dem Morgen und hatten noch eine Menge Dokumentation und Code-Tests in unseren Händen und brauchten dringend eine Pause, aber Tischfußball zu spielen war nicht ideal, da es uns aus der Zone werfen würde. Um unsere Fassung zu bewahren, begannen wir darüber nachzudenken, was wir tun könnten, um uns zu entspannen, aber dennoch in dieser "Arbeitszone" zu halten. Da schlug unser Manager vor:"Warum machst du nicht ein kleines Projekt und stellst es auf Hackster?". Nun gut, rufen Sie Pranav an.
Also haben wir uns entschieden, einen internetgesteuerten -warten-darauf- RC-Roboter mit einem winzig kleinen Bonus-Feature zu entwickeln (das wir später verraten werden, weil Spannung wichtig ist).

Also gut, wir waren aufgeregt und eilten zum hauseigenen Baumarkt.
Zweiter Akt:Der Wald der Hardware
Wir kommen im Hardware-Shop an, er ist gefüllt mit Bausätzen und Komponenten, die Ihre Augen vor Gier leuchten lassen, Ihre Hände werden zu ihnen gezogen und bevor Sie es wissen, werden Sie Teile löten, um einen 8-Bit-Rechner zu bauen, aber wir waren konzentriert und ließen uns von diesen Ablenkungen nicht zwingen und schnappten uns einfach, was wir brauchten (das solltest du auch)
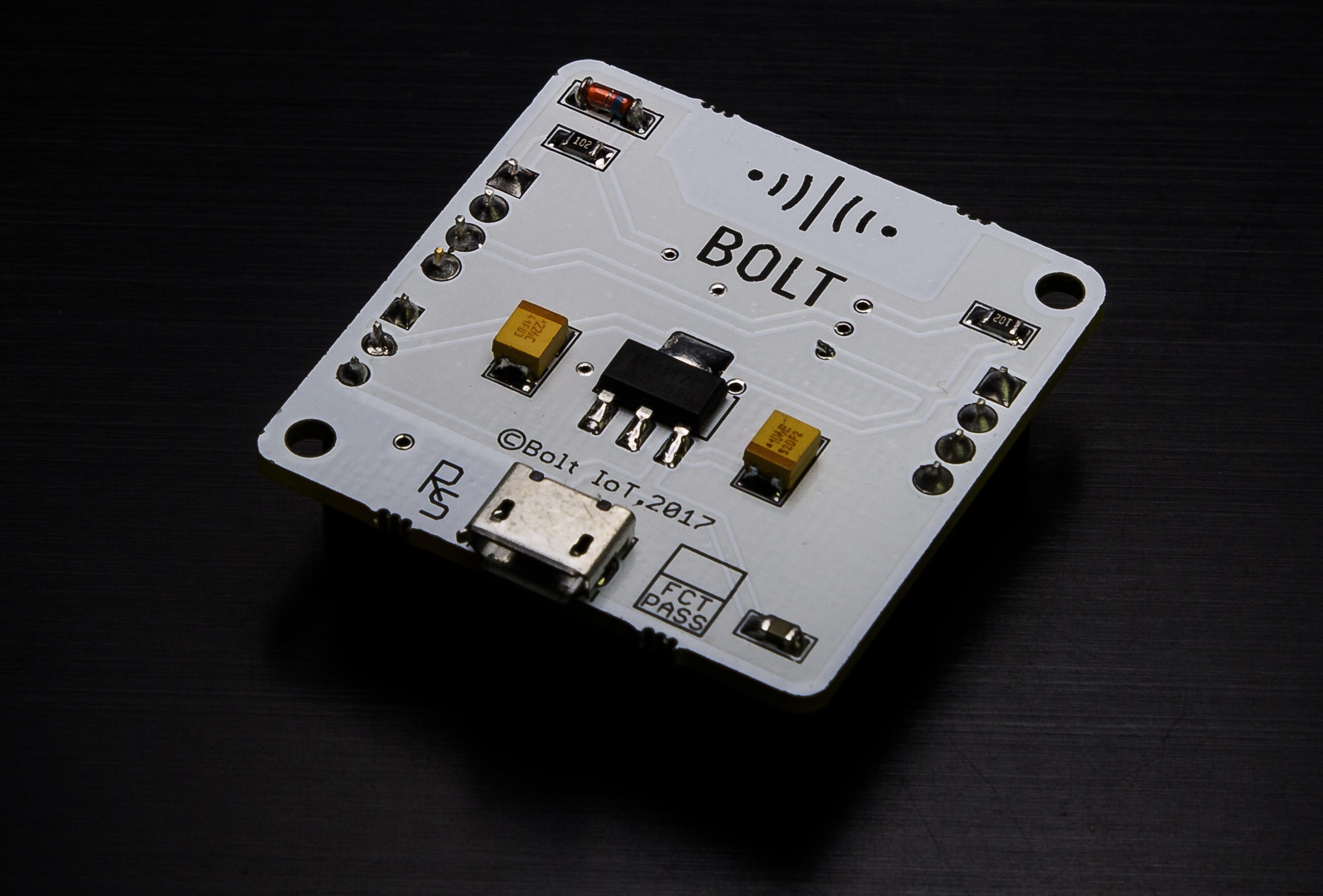
1. Bolt Wifi-Modul

2. Basis-Roboter-Kit

3. Arduino UNO oder Boltduino


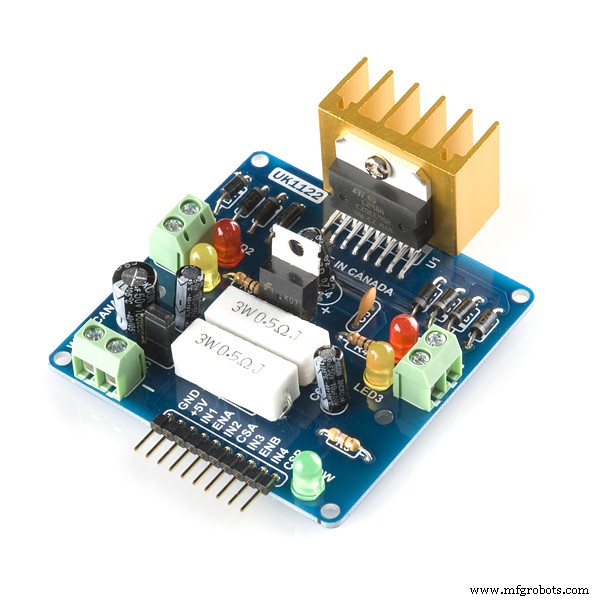
4. L298N Motortreiberschild

5. Näherungssensor

6. Überbrückungsdrähte

7. Netzteil

Dritter Akt:Schmieden
Wir kamen sicher mit allen Teilen, die wir brauchten, aus dem Wald der Hardware zurück. Es war Zeit für Devashish, den Hochlord von Hardwarey, seine Magie zu entfalten und diesen kleinen Roboter zusammenzustellen.

So hat er das gemacht.
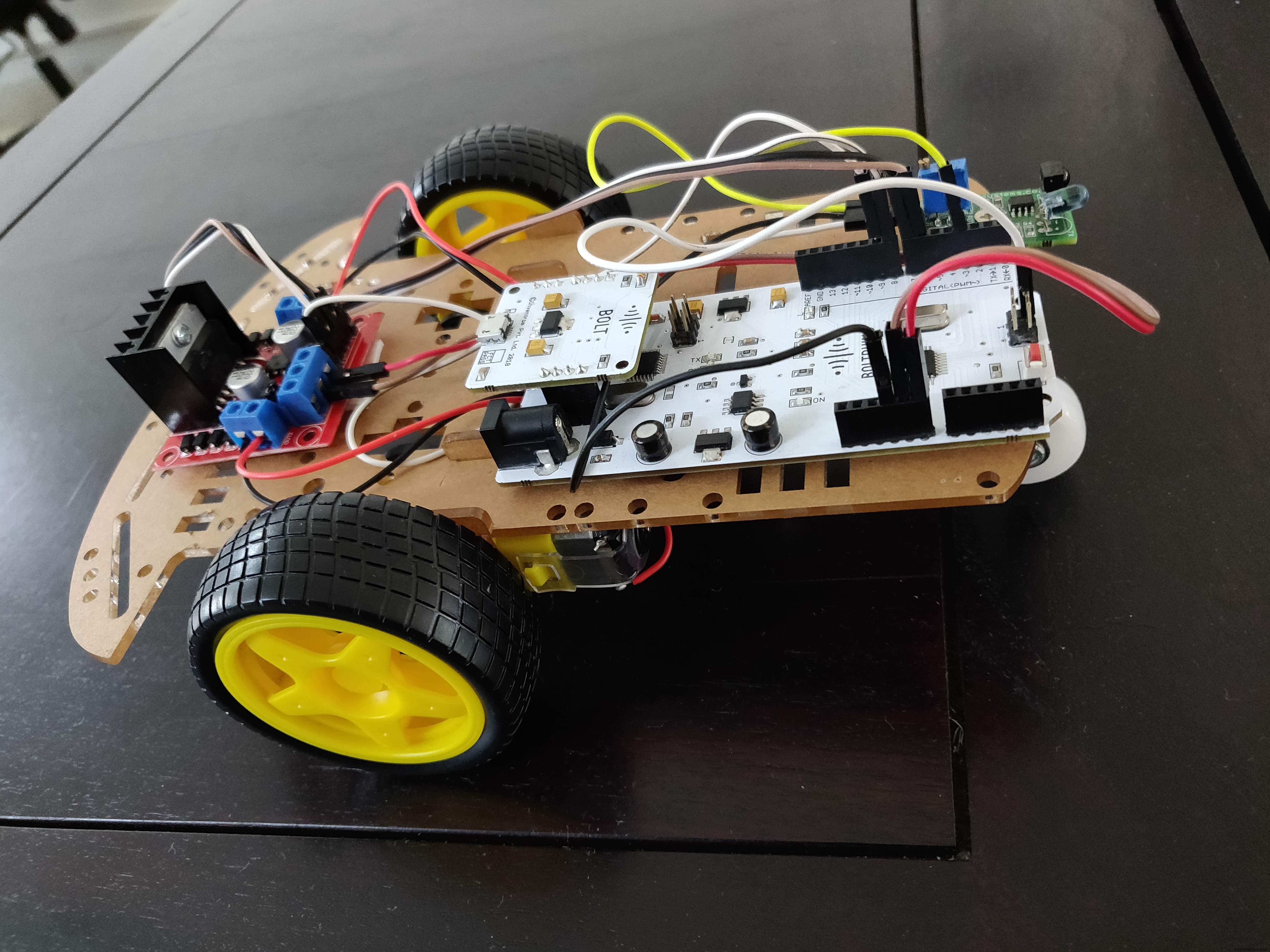
Montage der Hardware
1. Bringen Sie das Laufrad wie abgebildet im vorderen mittleren Teil des Fahrgestells an.
2. Bauen Sie das Roboter-Autochassis zusammen und befestigen Sie die beiden Gleichstrommotoren mit den Muttern und Schrauben zusammen mit den mitgelieferten Rädern wie abgebildet.
HINWEIS:Löten Sie die Drähte an den Anschluss des Motors, bevor Sie ihn am Chassis befestigen.
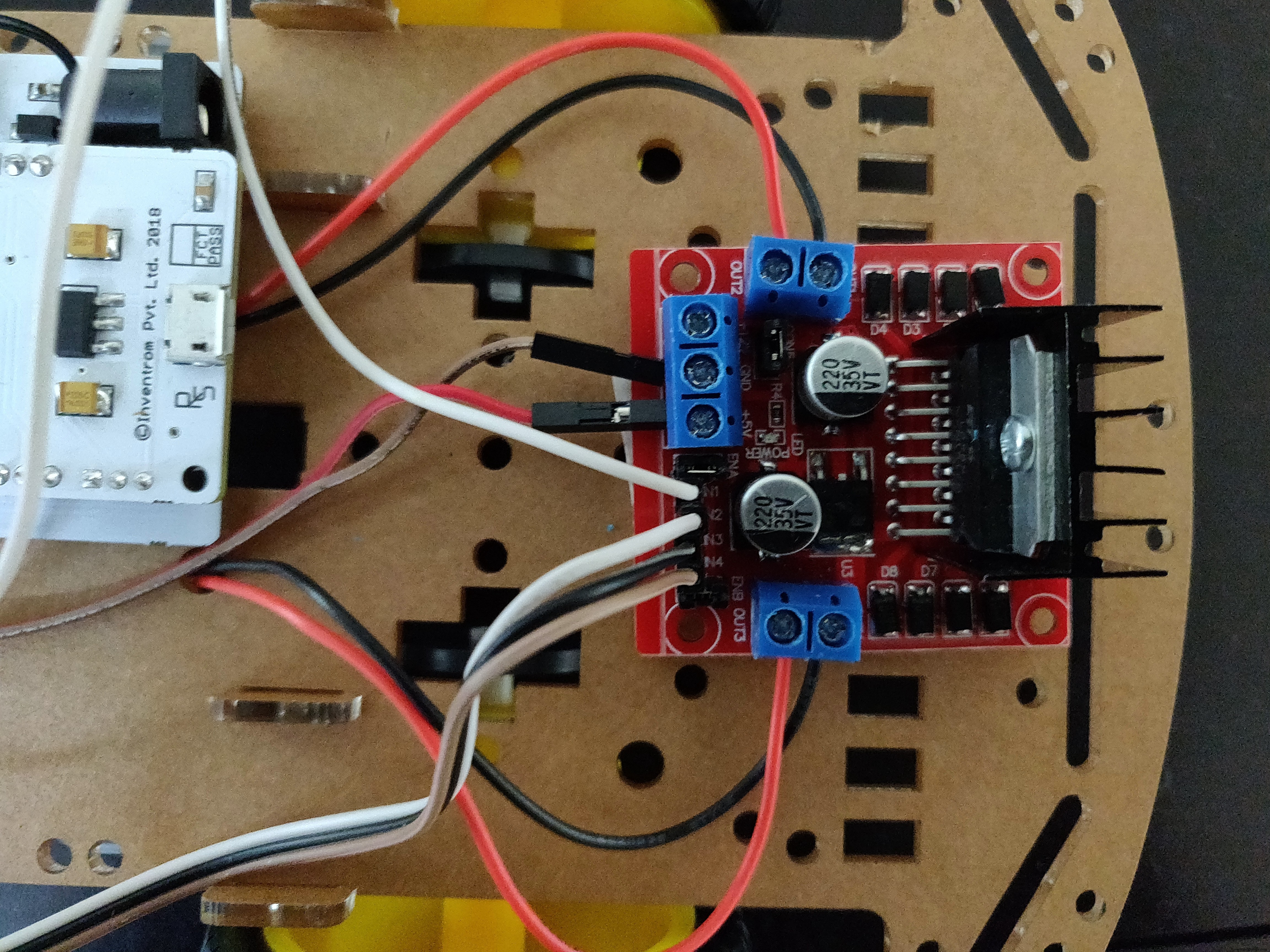
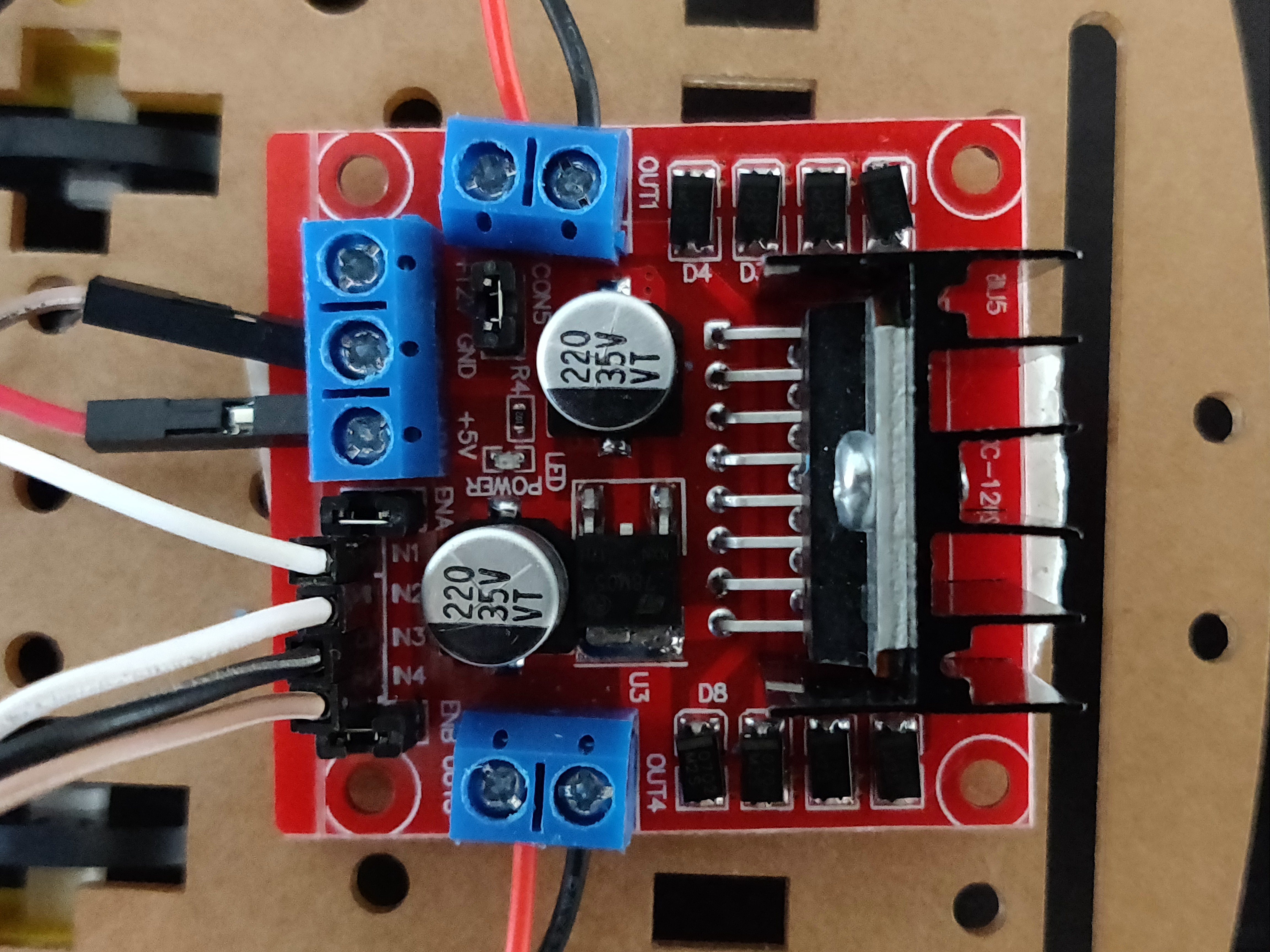
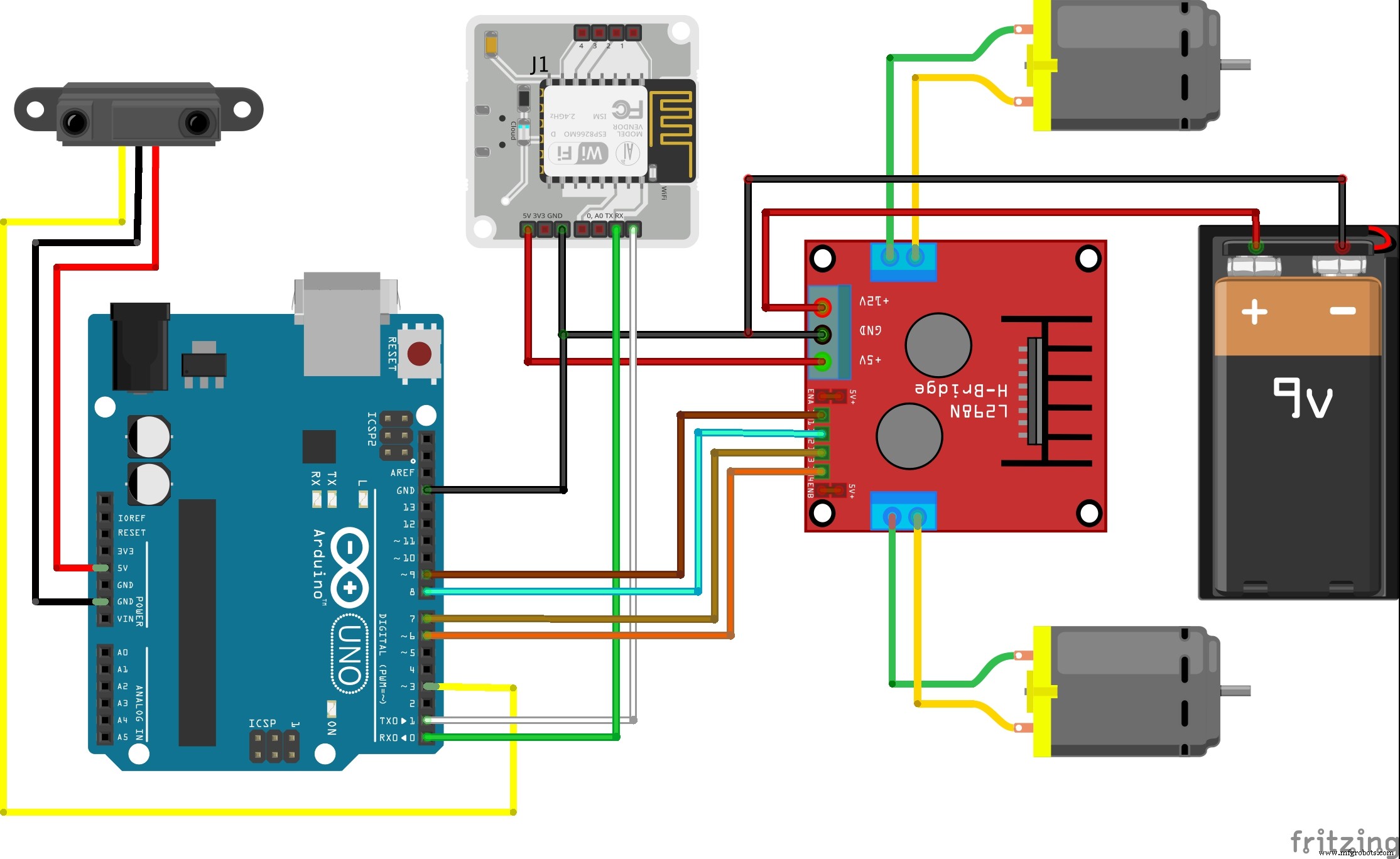
3. Verbinden Sie nun die Klemmen des Motors wie unten gezeigt mit dem L298N-Motortreibermodul.
HINWEIS:Verbinden Sie beide Anschlüsse des Motors mit derselben Seite des Treibermoduls.
4. Verbinden Sie den 5V-Pin und den GND-Pin des Treibermoduls mit 5V bzw. GND von Arduino.
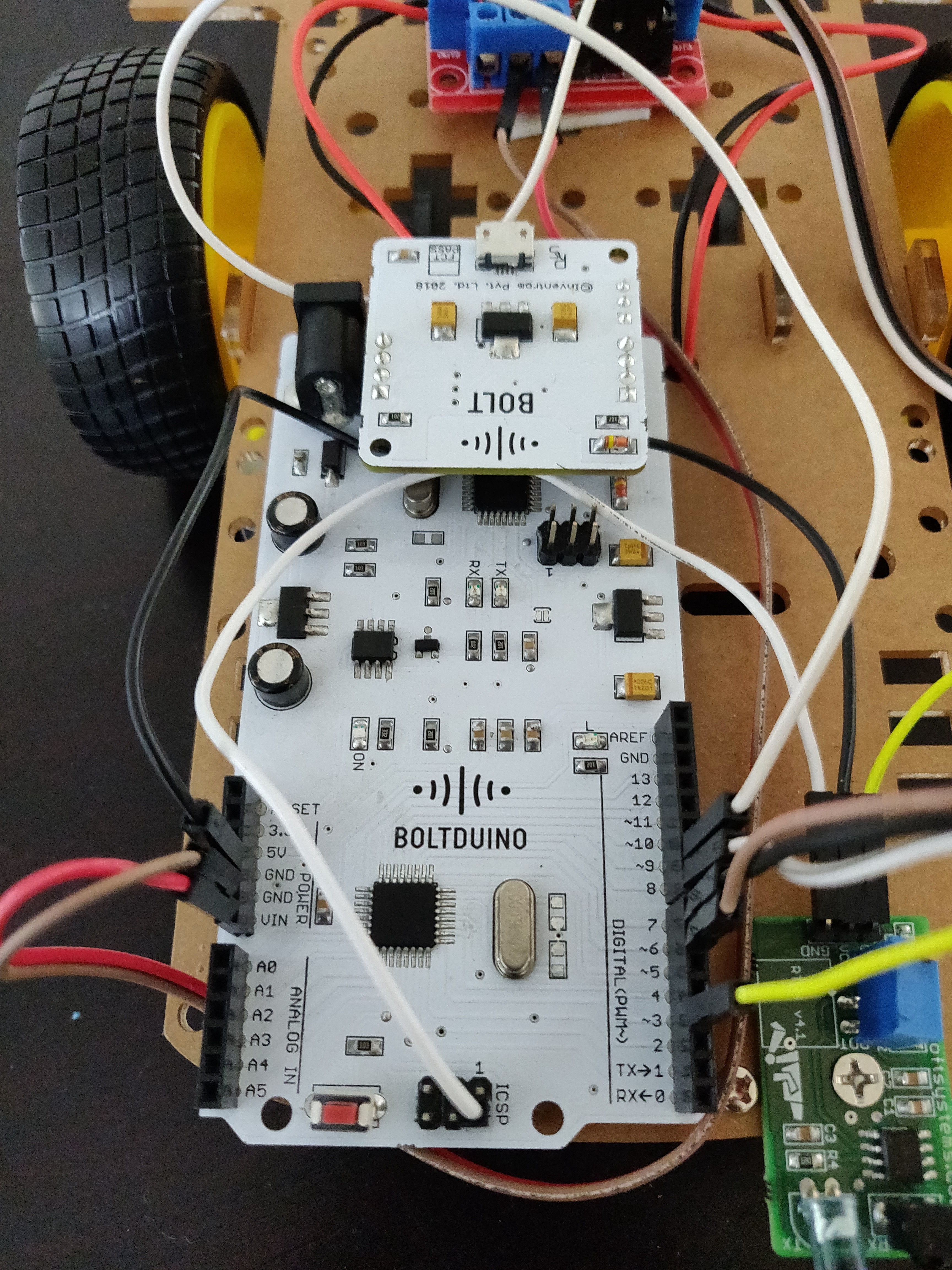
5. Verbinden Sie die Pins 5V, GND, Tx und Rx von Bolt mit den Pins 5V, GND, Rx und Tx von Arduino. Bringen Sie für Boltduino die Bolt-Einheit in dem vorhandenen Schlitz an.
6. Verbinden Sie die vier Eingangsklemmen (IN1, IN2, IN3, IN4) mit den Pins 6, 7, 8 bzw. 9.
7. Verbinden Sie die Pins 5V, GND und OUT des Näherungssensors mit den Pins 5V, GND und 3 von Arduino.


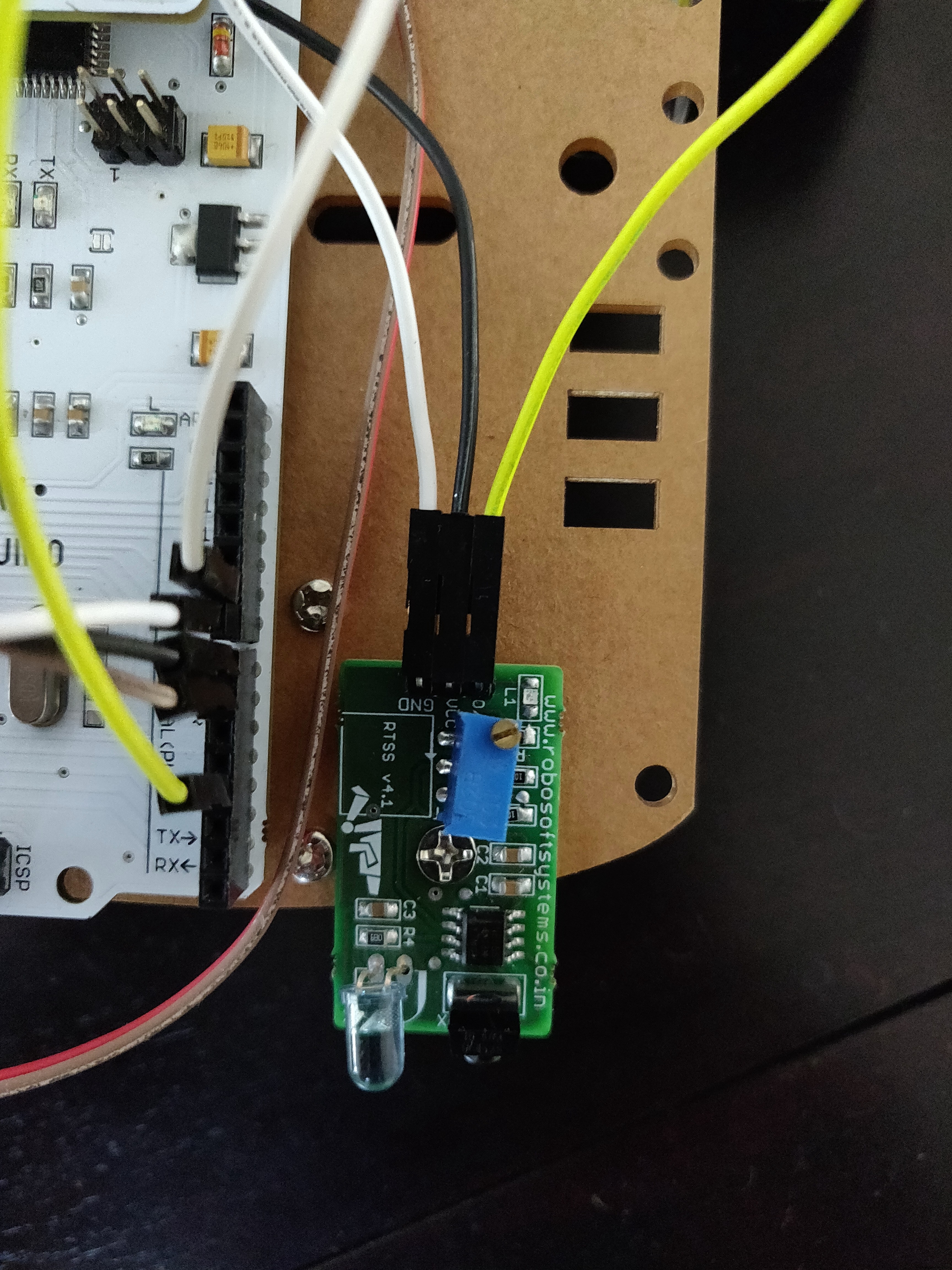
HINWEIS:Für alle Weitere Hilfe finden Sie in den unten aufgeführten Schaltplänen.
Bolt mit der Cloud verbinden
Nach dem Zusammenbau der Hardware registrieren und verbinden Sie die Bolt-Einheit mit der Bolt Cloud. Erfahren Sie mehr über das Registrieren und Verbinden von Bolt mit der Cloud.
Vierter Akt:Und dann gab es Konnektivität
Jetzt schickte der Hochlord von Hardwarey nach dem Assassinen von Kiln of Code (d. h. nach mir).
Er hatte die Aufgabe, diesen Roboter mit seinem Code zum Leben zu erwecken und mit der Cloud zu verbinden. Folgen Sie seinen Fußstapfen, um auch Ihren Roboter zum Laufen zu bringen.
Schritt 1: Hol die Code.
Holen Sie sich den Code aus dem Github-Repository dieses Projekts. Laden Sie eine .zip-Datei herunter oder klonen Sie sie auf Ihr System, was immer Ihnen passt.
Schritt 2: Arbeiten mit die Code.
Der Code besteht aus zwei Teilen:
- Ein Ordner namens app
- In diesem Ordner befinden sich zwei Dateien i. controller.html ii. controller.js. Wir werden später darüber sprechen.
- Dann gibt es die Firmware für Ihren Arduino in einer Datei namens Bolt_Robot_Car.ino . Dies wird auf Ihrem Arduino geflasht / hochgeladen.
Schritt 3: Einstellung nach oben Arduino.
Wenn Sie mit dem Einrichten Ihrer Hardware und dem Verbinden Ihres Bolzens mit der Cloud fertig sind, laden Sie die Firmware in der Datei Bolt_Robot_Car.ino . hoch zu Ihrem Arduino. Um zu erfahren, wie man Arduino IDE einrichtet und einen Code zu Arduino hochlädt, folgen Sie diesem Link.
Schritt 4: Die Verantwortlicher App.
Doppelklicken Sie auf controller.html Datei und Sie sollten die folgende Webseite sehen.
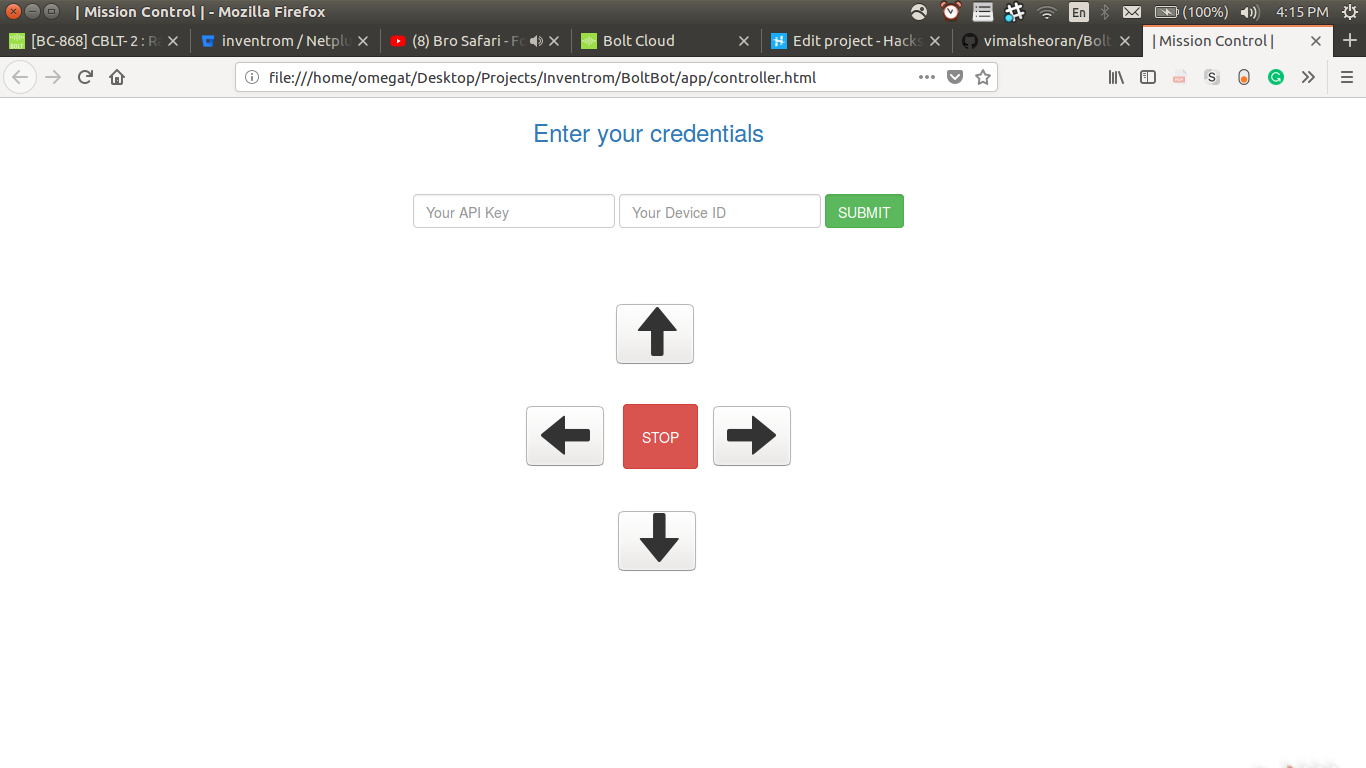
Geben Sie nun Ihren API-Schlüssel ein und Geräte-ID in die entsprechenden Felder ein und klicken Sie auf SENDEN Sie können Ihren API-Schlüssel erhalten und Geräte-ID von Ihrem Bolt Cloud-Dashboard.
Danach können Sie mit den Steuertasten die Bewegung Ihres Roboters steuern. Der Tastendruck löst bestimmte JavaScript-Funktionen aus (siehe Datei controller.js ), um Befehle an die Bolt Cloud und dann an Ihr Bolt WiFi-Modul zu senden. Jetzt haben Sie einen RC-Bot, der damit macht, was Sie wollen. Damit können mehrere Dinge gemacht werden, Sie können ein paar Sensoren daran anschließen oder es automatisch machen oder was auch immer Sie möchten. Und wenn Sie es vermasseln, machen Sie sich keine Sorgen, wir, die Eingeborenen des Maker-Landes, sind jederzeit für Sie da.
Fünfter Akt:Ostereier
Ich weiß, einige von Ihnen denken vielleicht "Hey, Sie sagten, es gäbe eine Bonusfunktion, wo ist sie?" Nun, keine Sorge, wir lassen Sie nicht allein, aber es besteht eine hohe Wahrscheinlichkeit, dass Sie die Funktion in ActThree:Forging bereits bemerkt haben wenn nicht, sieh es dir noch einmal an. Aber wer hat schon so viel Zeit, also TL; DR stoppt Ihr Roboter automatisch, wenn er auf ein Hindernis oder eine Blockade in seinem Weg stößt, damit Sie ihn nicht gegen die Wand schlagen. Okay, das ist das Ende dieser Geschichte. Schauen Sie sich dieses Video an, um das Video-Tutorial für dieses Projekt zu sehen.
Demo:
Code
BoltBot
https://github.com/vimalsheoran/BoltBotSchaltpläne
Herstellungsprozess
- Hauptkomponenten eines Autos und ihre Funktionen
- Raspberry Pi Roboter über Bluetooth gesteuert
- Gestengesteuerter Roboter mit Raspberry Pi
- RASPBERRY PI WIFI-ROBOTER, KONTROLLIERT VON ANDROID SMART PHONE
- Windows 10 IoT Core:Sprachgesteuerter Roboter
- WLAN-gesteuerter Roboter mit Raspberry Pi
- ROObockey:Ferngesteuerter, zielunterstützter Straßenhockey-Roboter
- Joystick-gesteuertes RC-Auto
- Sprachgesteuerter Roboter
- Über Ethernet gesteuerter Roboterarm