


Sprachgesteuertes Auto
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
Über dieses Projekt
Komponenten:
- Arduino Uno
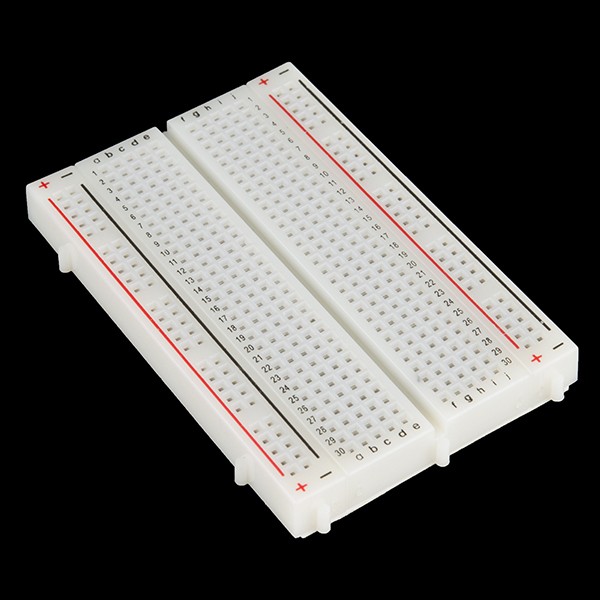
- Breadboard
- Motoren x2
- Räder x2
- Chassis (in geeigneter Größe)
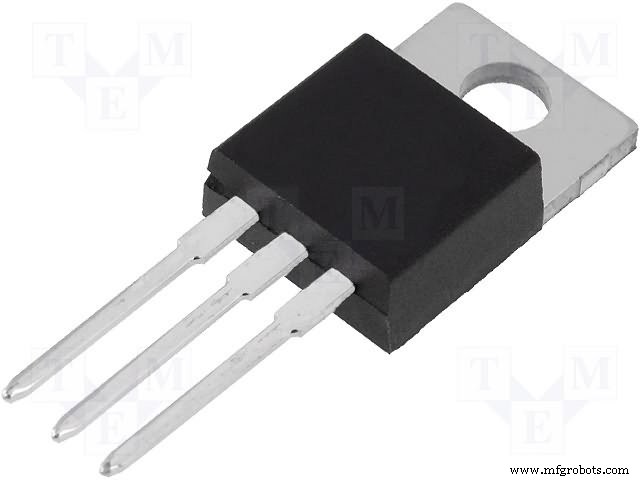
- Spannungsregler LM7805
- L293D
- 12-V-Batterie (Stromquelle)
- Überbrückungsdrähte
- Bluetooth-Modul HC-05
Die App findet ihr hier:https://play.google.com/store/apps/details?id=appinventor.ai_cempehlivan92.Arduino_Sesli_Kontrol
Idee:
Wir verbinden das Bluetooth-Modul mit der mobilen App. Sobald dies erledigt ist, werden die Befehle, die wir über das Handy geben, über das Modul an das Arduino gesendet. Wir akzeptieren Zeichen für Zeichen aus dem von der App gesendeten seriellen Puffer und kombinieren sie zu einer Zeichenfolge.
Wir vergleichen es dann mit dem Befehl. Bei Übereinstimmung wird der Befehl ausgeführt. Wenn wir beispielsweise die Zeichenfolge "Right" erhalten, dreht der Bot nach rechts.
Anschlüsse:
Alle Verbindungen finden Sie hier:https://yainnoware.blogspot.com/p/voice-control-car.html
Code:
int motor_input1=11;int motor_input2=10;int motor_input3=5;int motor_input4=6;String voice;void setup() { Serial.begin(9600); pinMode (motor_input1, OUTPUT); // RECHTER MOTOR PinMode (motor_input2, OUTPUT); // RECHTER MOTOR PinMode (motor_input3, OUTPUT); // LINKER MOTOR PinMode (motor_input4, OUTPUT); //LINKER MOTOR}void loop() { while(Serial.available()>0) { delay(10); char c=Seriell.read(); if(c=='#') { Pause; } Stimme+=c; } if(voice=="forward"){ digitalWrite(motor_input1, LOW); digitalWrite (motor_input2, HIGH); digitalWrite (motor_input3, LOW); digitalWrite (motor_input4, HIGH); Verzögerung (5000); } else if(voice=="back"){ digitalWrite(motor_input1, HIGH); digitalWrite (motor_input2, LOW); digitalWrite (motor_input3, HIGH); digitalWrite (motor_input4, LOW); delay(5000);} else if(voice=="left"){ digitalWrite(motor_input1, LOW); digitalWrite (motor_input2, HIGH); digitalWrite (motor_input3, HIGH); digitalWrite (motor_input4, LOW); Verzögerung (800); } else if(voice=="right"){ digitalWrite(motor_input1, HIGH); digitalWrite (motor_input2, LOW); digitalWrite (motor_input3, LOW); digitalWrite (motor_input4, HIGH); Verzögerung (800); } if(voice.length()>0) { Serial.println(voice); Stimme=""; digitalWrite (motor_input1, LOW); digitalWrite (motor_input2, LOW); digitalWrite (motor_input3, LOW); digitalWrite (motor_input4, LOW); } } Herstellungsprozess
- MajorTom:Alexa Voice Controlled ARDrone 2.0
- Arduino Digital Dice
- DIY 37 LED-Roulette-Spiel
- Joystick-gesteuertes RC-Auto
- ATtiny85 Mini Arcade:Schlange
- Tragbarer Reichweitendetektor
- MobBob:DIY-Arduino-Roboter, der von einem Android-Smartphone gesteuert wird
- App-gesteuerter Hydraulikkran
- Smart Face Tracking Roboterauto
- Arduino-gesteuerter Klavierroboter:PiBot