


Bluetooth-gesteuerter Pick-and-Place-Roboter
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
Notwendige Werkzeuge und Maschinen
 |
|
Apps und Onlinedienste
 |
| |||
 |
|
Über dieses Projekt
Einführung
Dieses Tutorial zeigt, wie Sie einen Pick-and-Place-Roboter bauen, der mit Ihrem Android-Smartphone gesteuert wird. Wir haben eine mobile App mit der MIT App Inventor-Plattform erstellt. In diesem Tutorial werden wir über jeden Teil dieses Projekts separat sprechen. Wir werden darüber sprechen:
- 1 So steuern Sie einen Servomotor
- 2 So steuern Sie einen Gleichstrommotor
- 3 So verwenden Sie das Bluetooth-Modul
- 4 So steuern Sie Ihren Roboter mit Ihrem Mobiltelefon
Ich hoffe also, dass dieses Tutorial alle Ihre Anforderungen zum Erstellen Ihres Bots abdeckt.
Das Szenario
Zuallererst müssen wir wissen, wie der Roboter Bestellungen aufnimmt. Wir verwenden ein Bluetooth-Modul, das mit einer mobilen App verbunden wird, die wir später erstellen werden. Im Moment müssen wir wissen, dass wir unseren Befehl mit unserem Handy über die Bluetooth-Verbindung an den Roboter senden.

Hardware
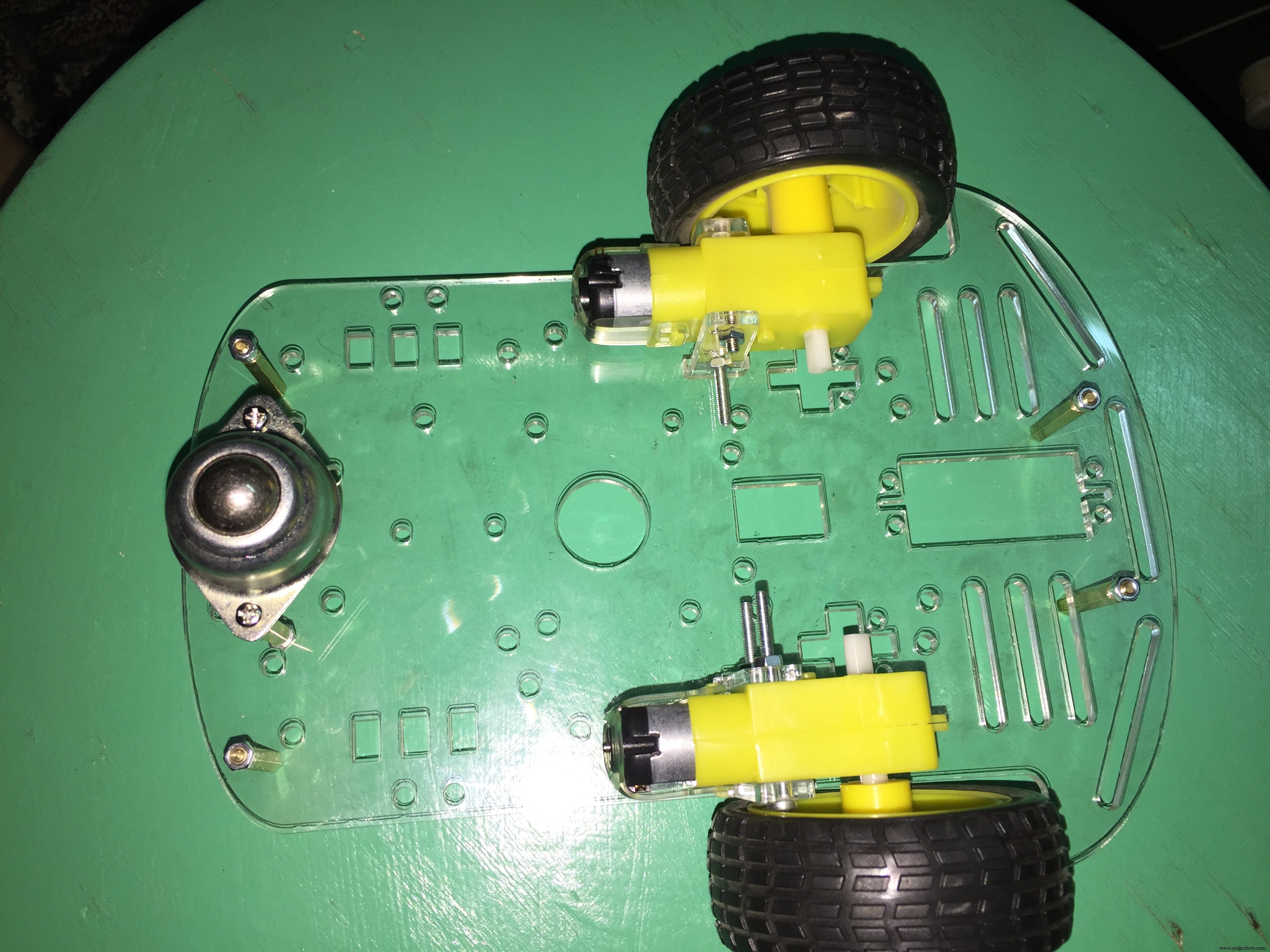
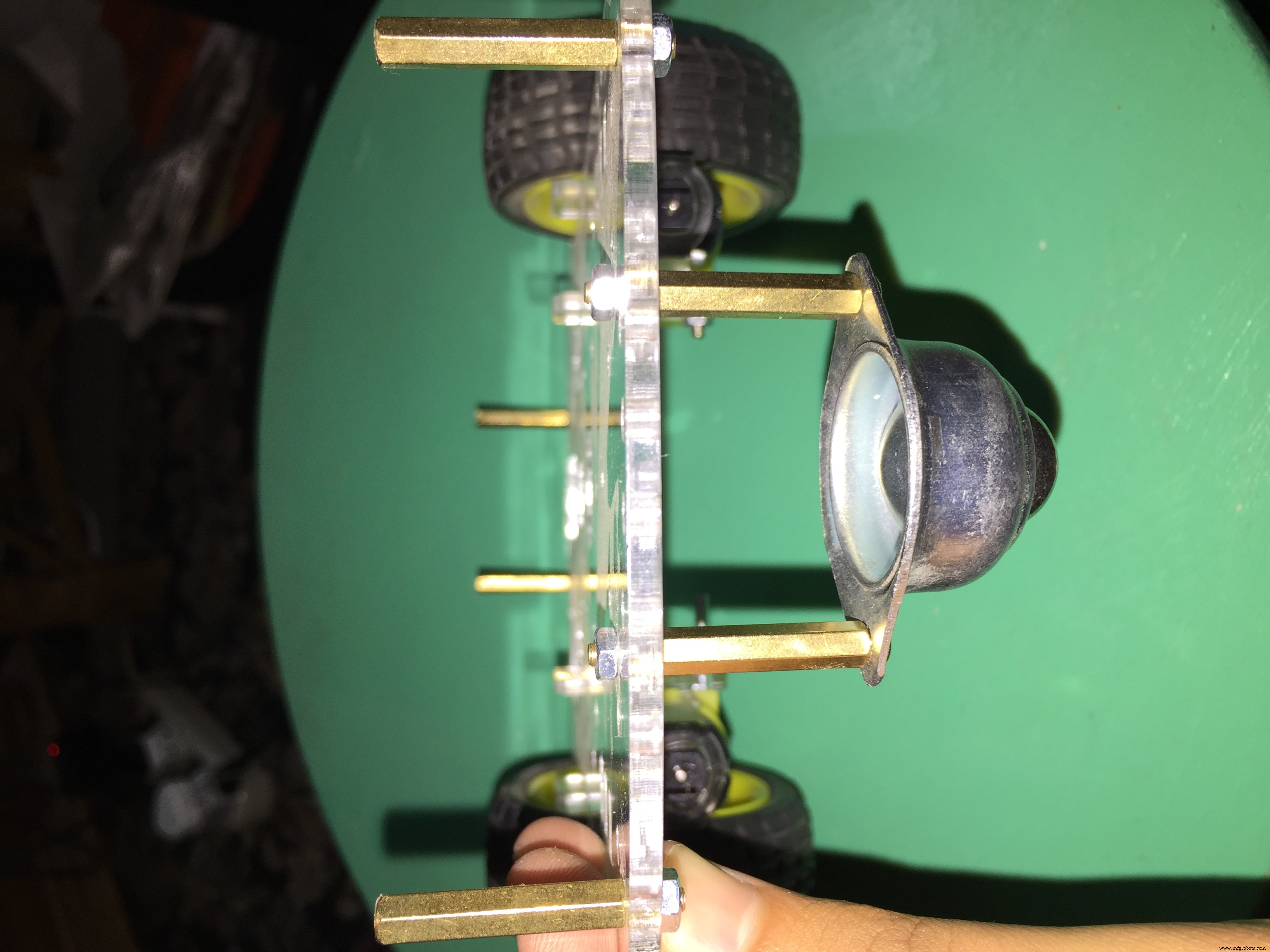
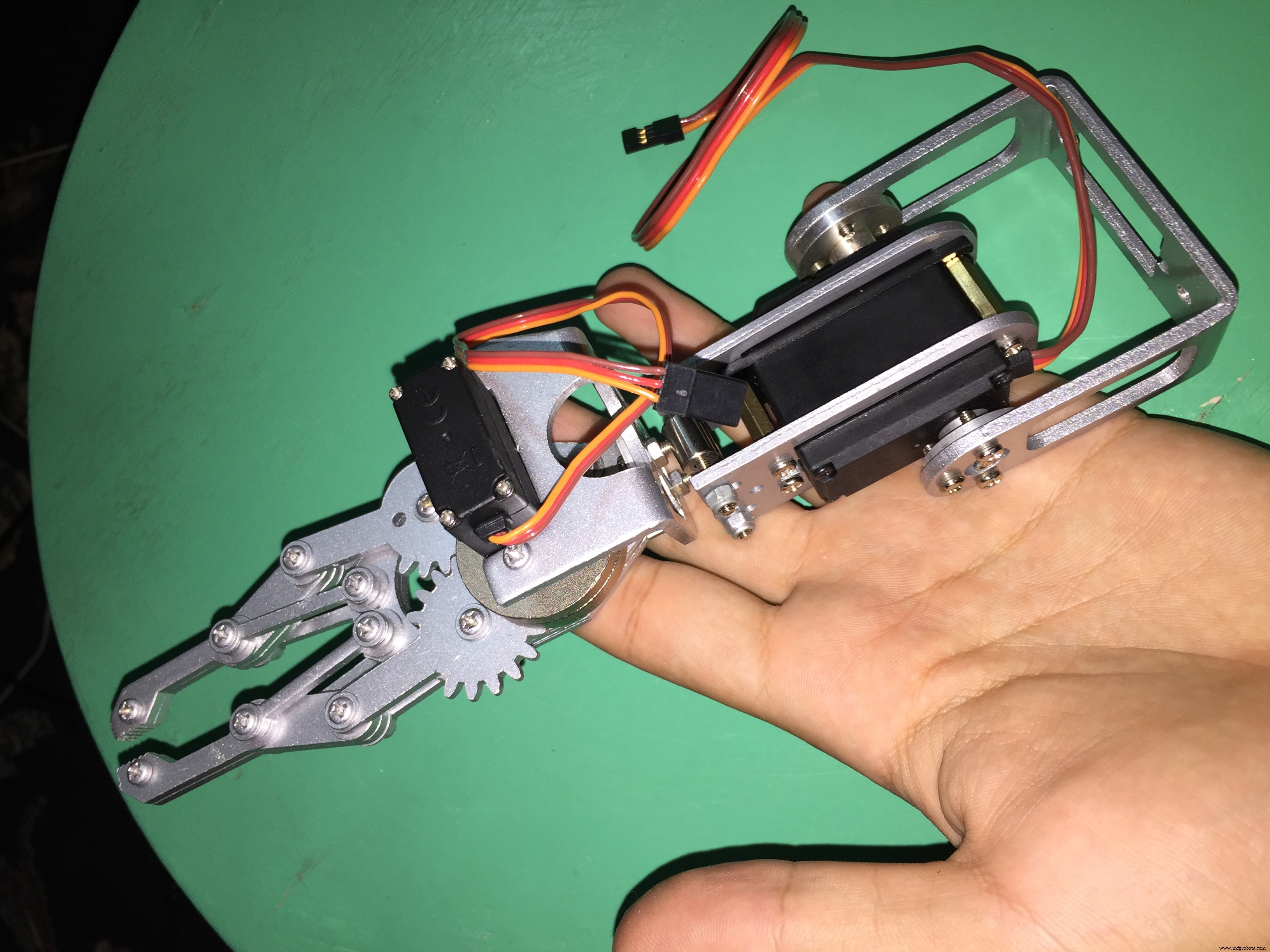
- Der Bausatz erfordert einen einfachen Zusammenbau, der jedoch einige Zeit in Anspruch nimmt. Befolgen Sie für die Montage die Anweisungen, die Ihrem Bausatz beiliegen,
Am Ende der Montage sollte es so aussehen:
Mit dem Motor Shield können Sie mit Ihren Motoren sprechen. Wenn Sie die Motoren direkt an das Arduino-Board anschließen, wird ein Feuer ausgelöst! da jeder Motor mindestens 80 mA benötigt, aber der maximale Strom, den der digitale Arduino-Pin liefern kann, 40 mA beträgt, also NICHT Versuchen Sie, den Motor direkt an Ihr Arduino-Board anzuschließen.
- Der Motorschutz hilft Ihnen, die Richtung Ihres Motors zu steuern (z. B. VORWÄRTS, RÜCKWÄRTS und LOS bewegen).
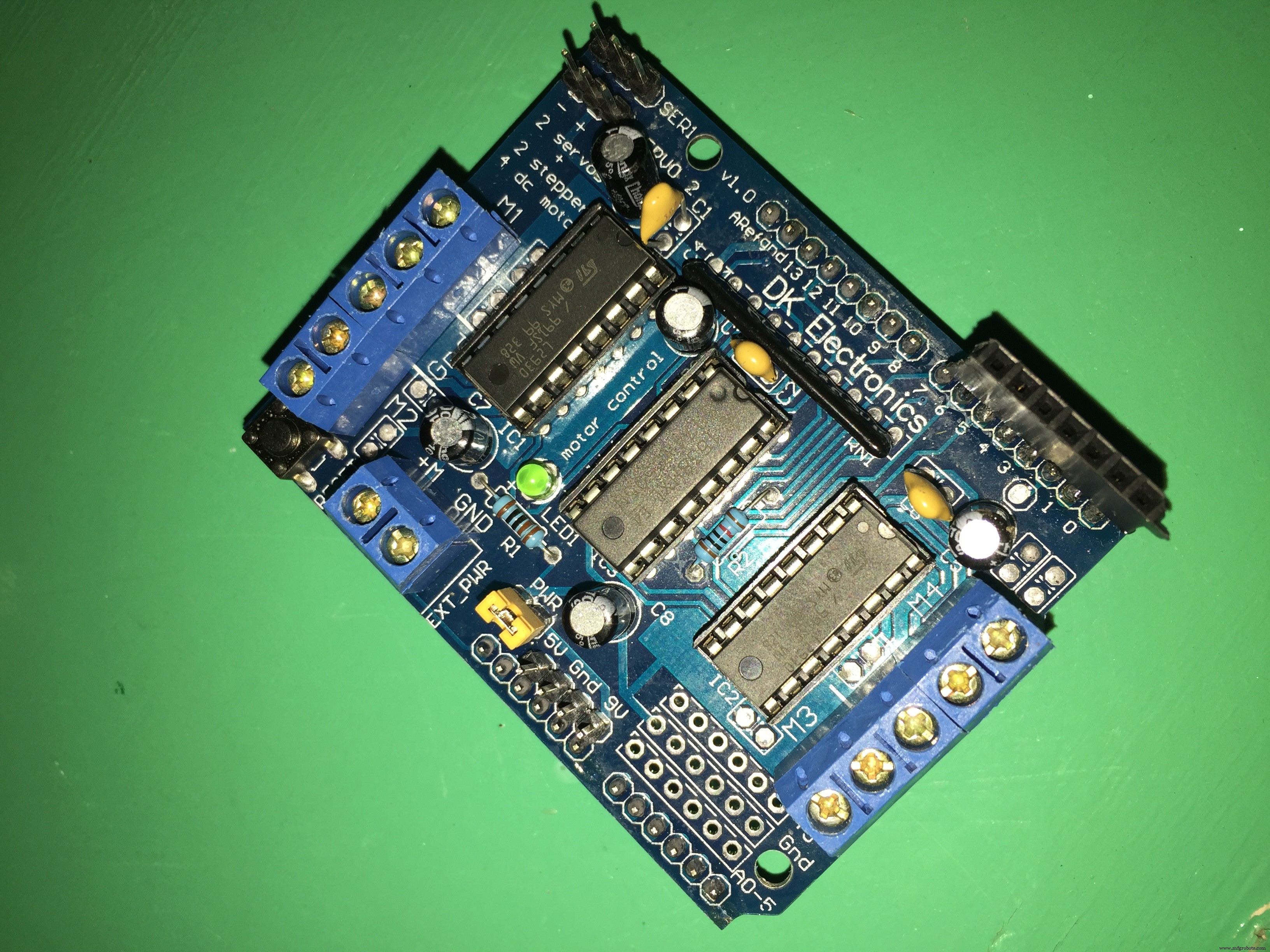
- Der Motorschild ermöglicht die Steuerung von bis zu 4 bidirektionalen DCs Motoren mit individueller 8-Bit-Geschwindigkeitsauswahl (also ca. 0,5% Auflösung).
Sie können einige Stiftleisten auf die Oberseite des Schildes löten, um die Arduino-Pins verwenden zu können.
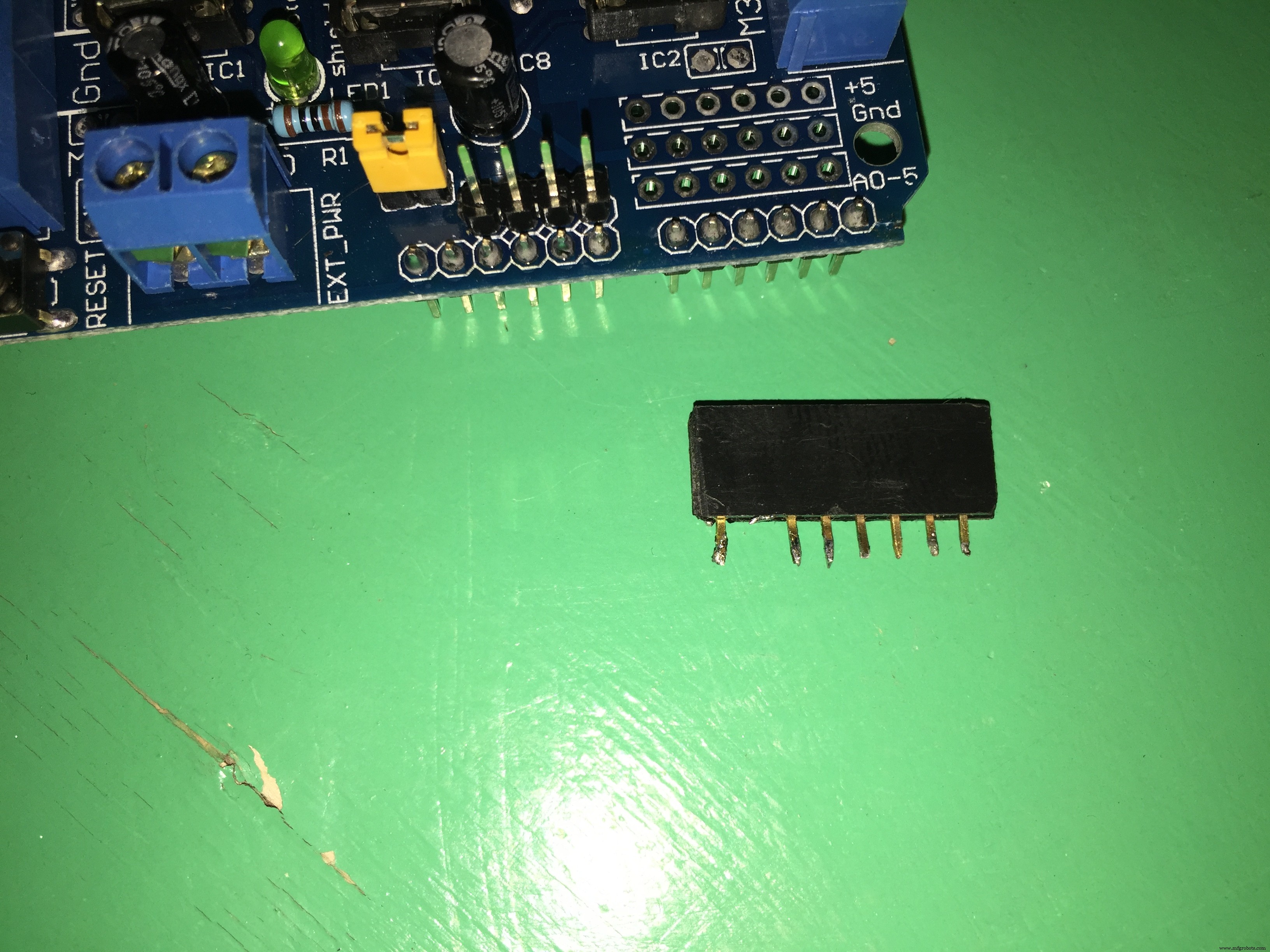

Sie müssen Ihren Motorschutz wie folgt über Ihrem Arduino-Board kleben:
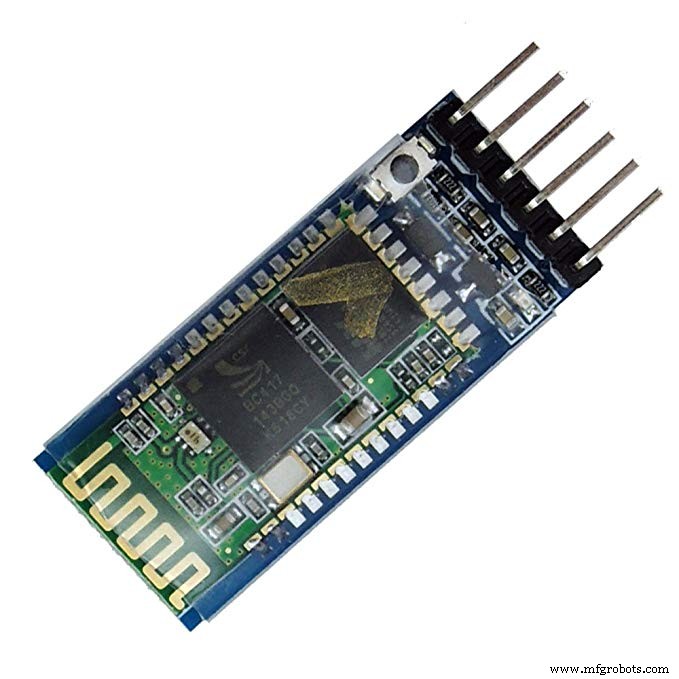
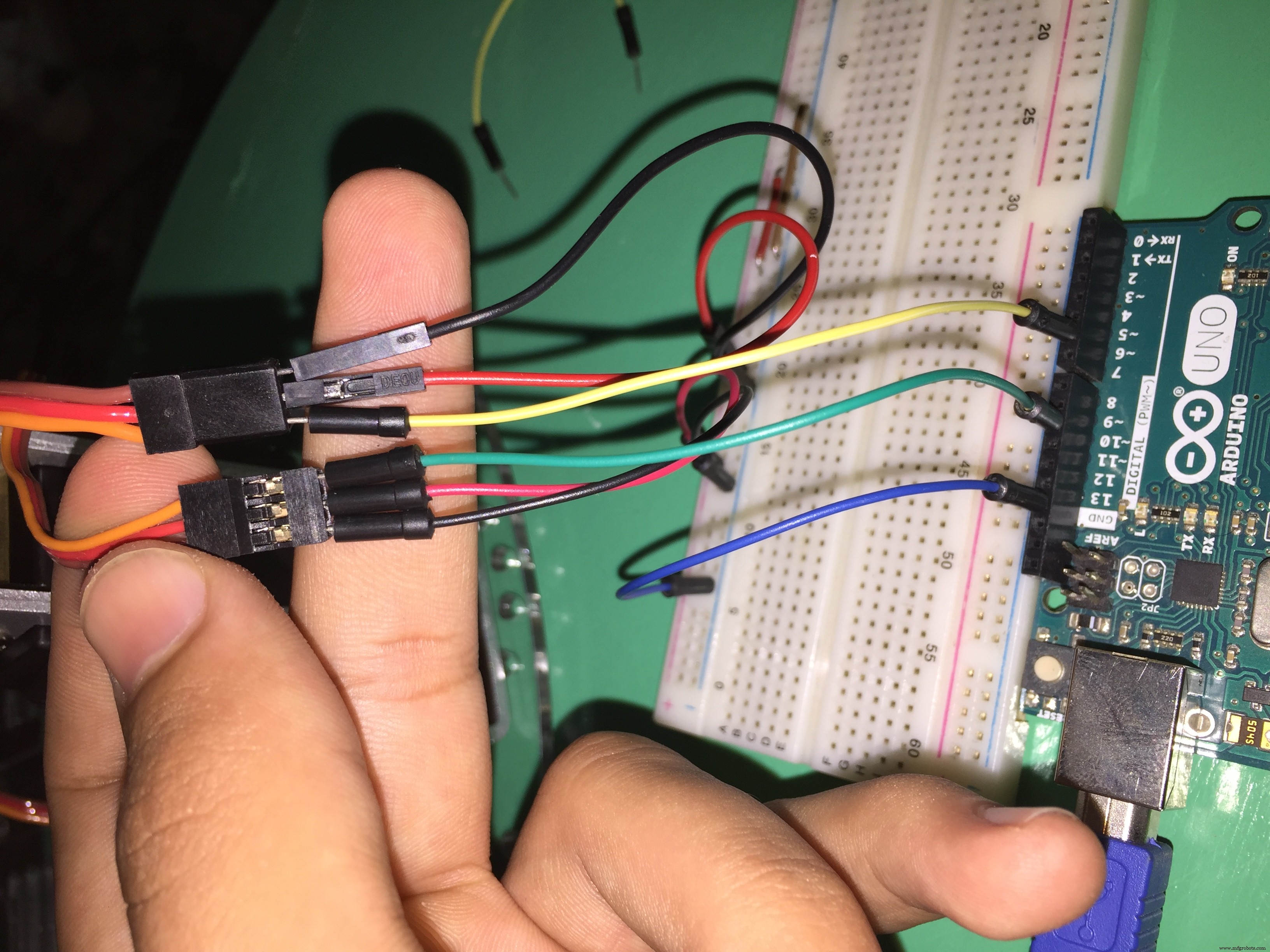
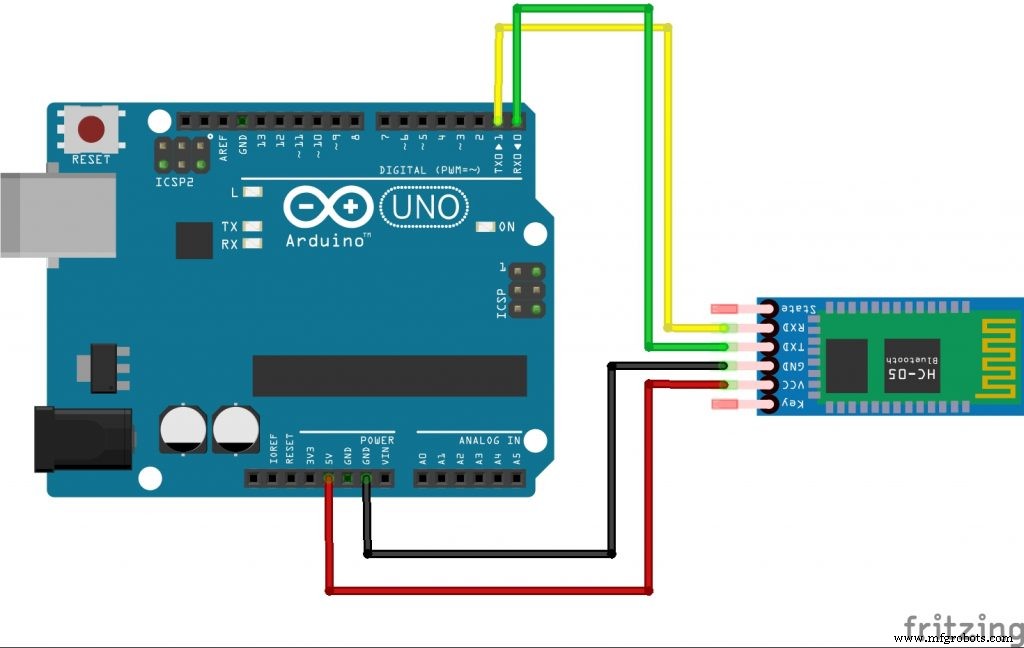
Das Bluetooth-Modul :Es ist der Kanal zwischen dem Piloten und dem Roboter, um Befehle zu senden und Aktionen auszuführen.
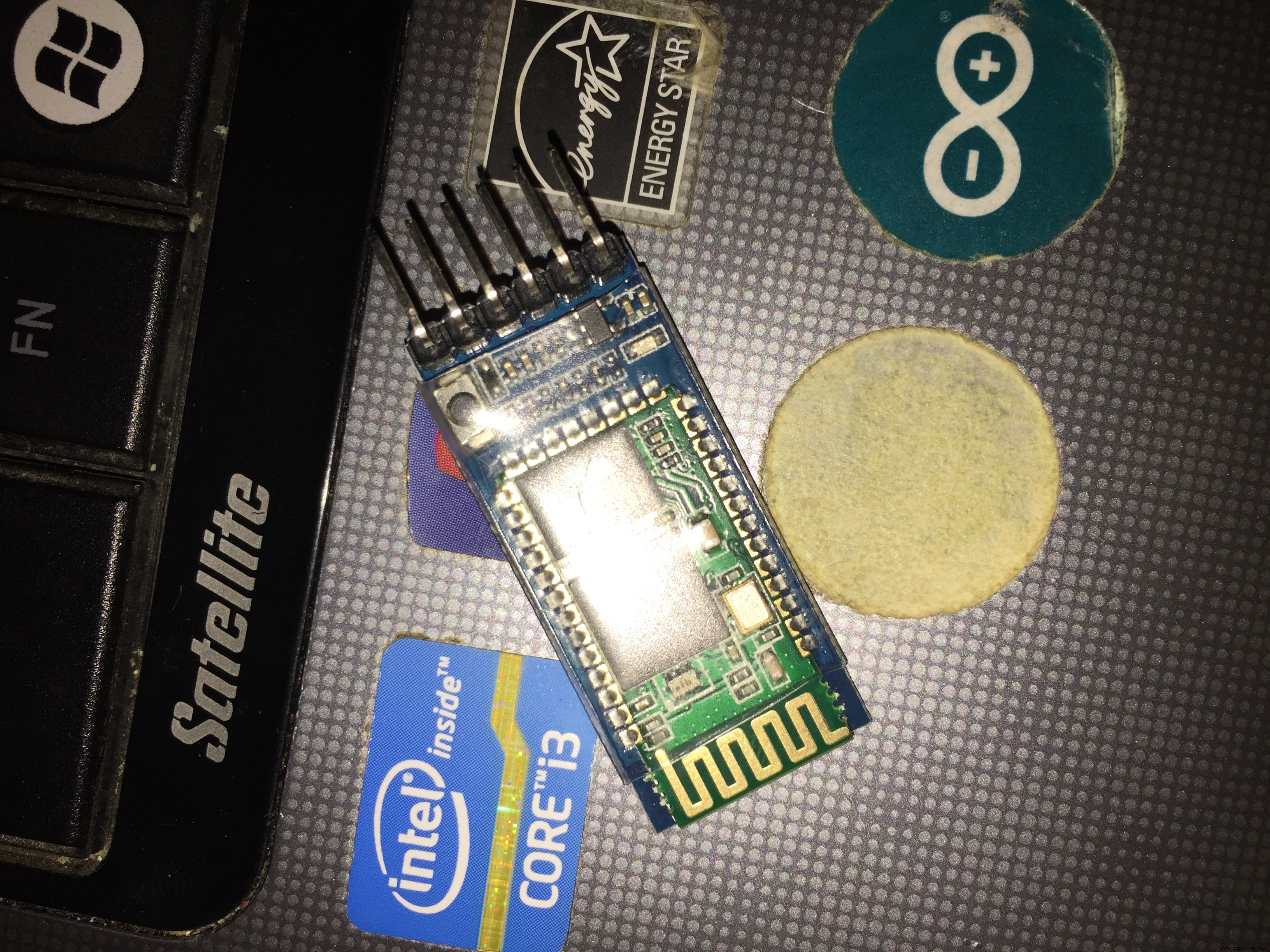
Es hat 6 Stifte; wir verwenden nur die mittleren vier Pins (RX-TX-GND-+5):

Wir verbinden:
- +5 auf dem Bluetooth-Modul auf die 5V auf dem Arduino
- GND am Bluetooth-Modul an GND am Arduino
- Rx auf dem Bluetooth-Modul zum Tx auf dem Arduino
- Tx auf dem Bluetooth-Modul zum Rx auf dem Arduino

HINWEIS:WARUM Rx zu Tx und Tx zu Rx?
Denn das Bluetooth-Modul sendet Daten (Tx) und das Arduino empfängt diese Daten (Rx).
Einer sendet und der andere empfängt
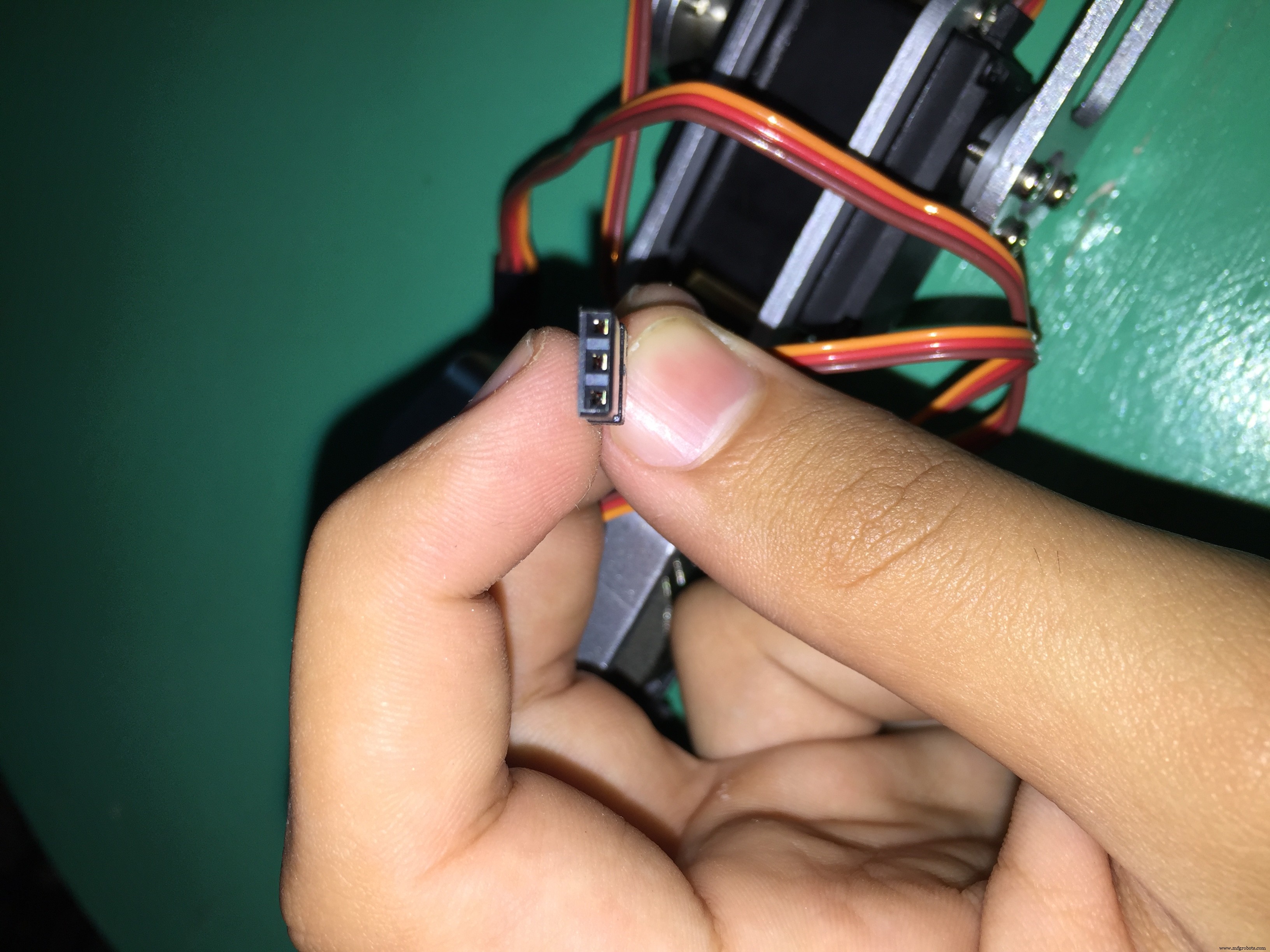
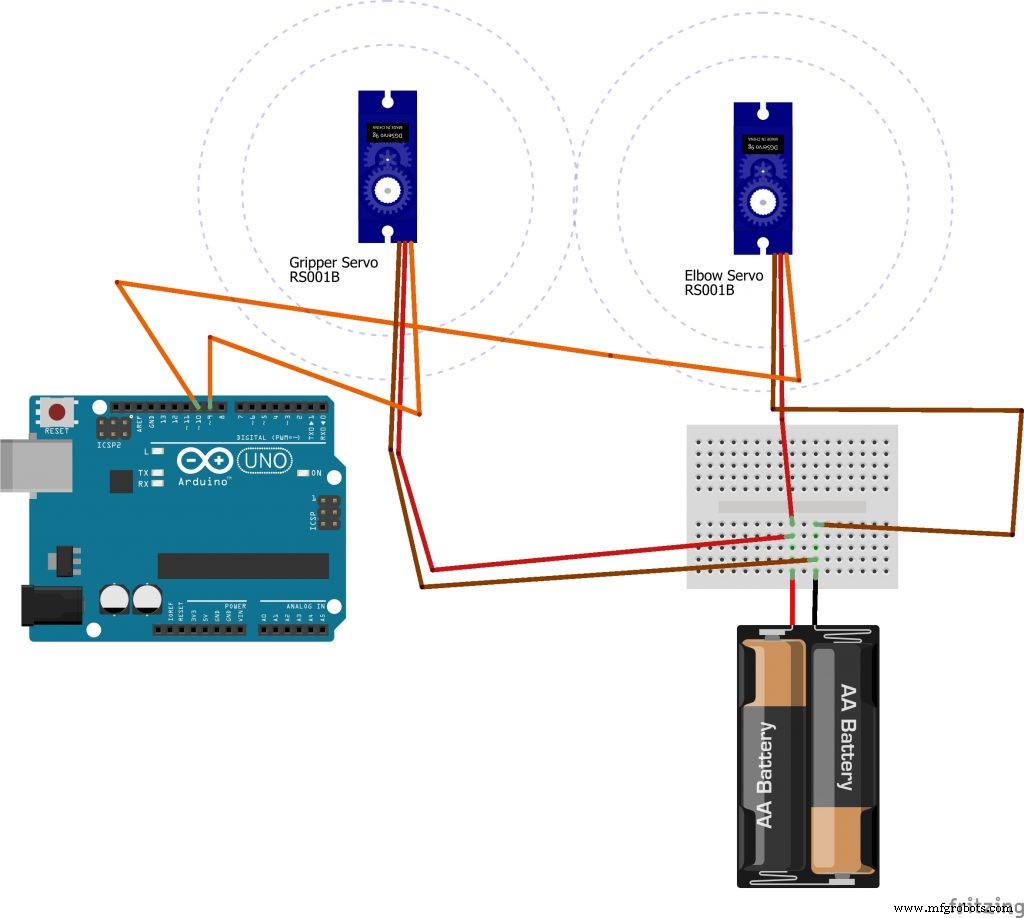
4) Der Servomotor hat 3 Drähte:Rot (Positiv), Braun (Negativ), Gelb oder Orange (Signal).
Hinweis:TUN Verbinden Sie das Plus und das Minus der Servomotoren NICHT mit den 5V und GND des Arduino-Boards. Das Arduino-Board wird Feuer machen aufgrund der hohen Stromaufnahme der Motoren; verwenden die externer Akku.
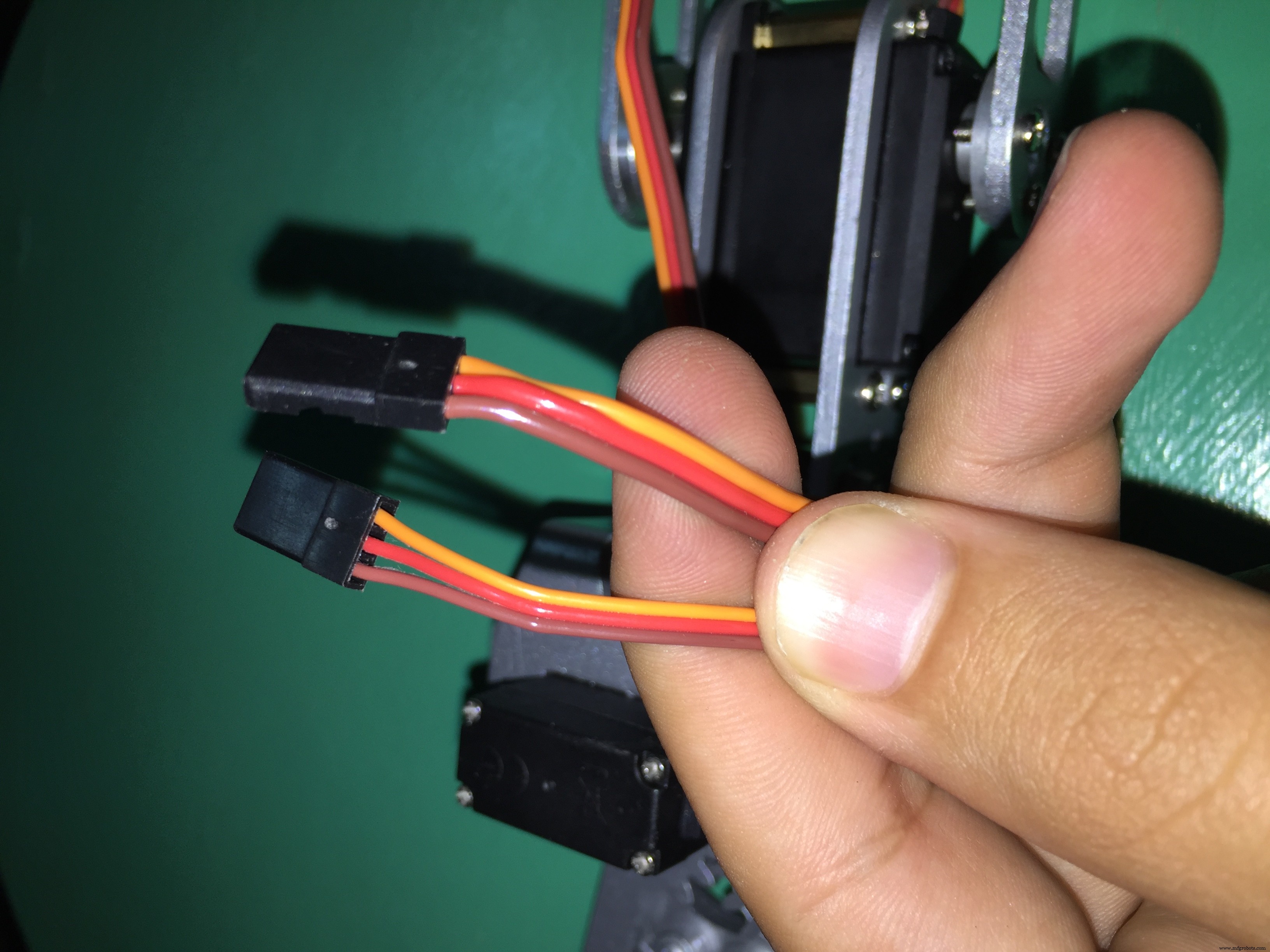
- Das rote Kabel zum Pluspol der externen Batterie
- Das braune Kabel zum Minuspol der externen Batterie
- Das orangefarbene Kabel zu einem beliebigen digitalen (PWN) Pin auf dem Arduino
HINWEIS:Vergessen Sie nicht, den GND der Batterie und den GND des Arduino zu einem gemeinsamen zu machen, indem Sie jeden GND miteinander verbinden.
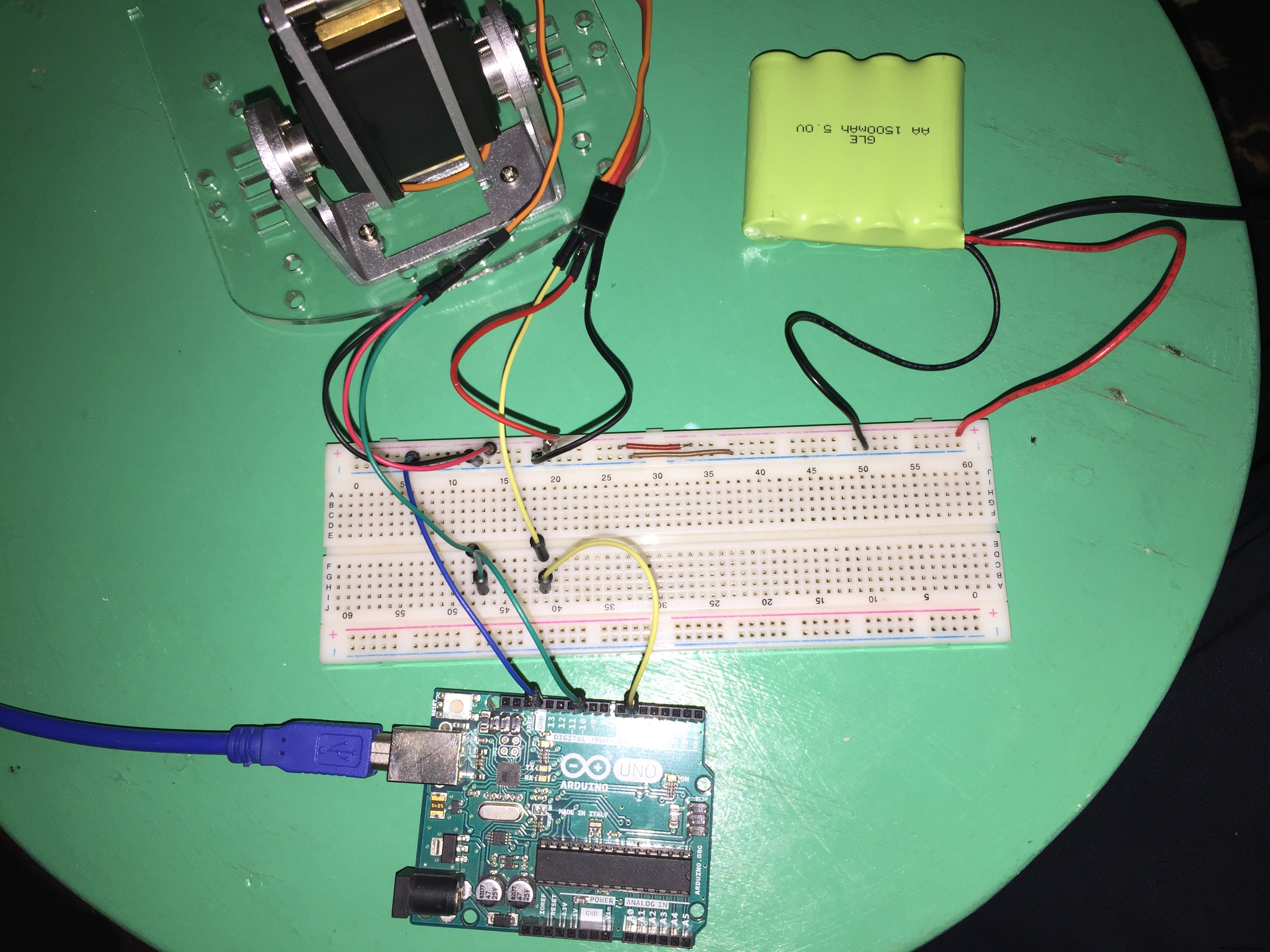
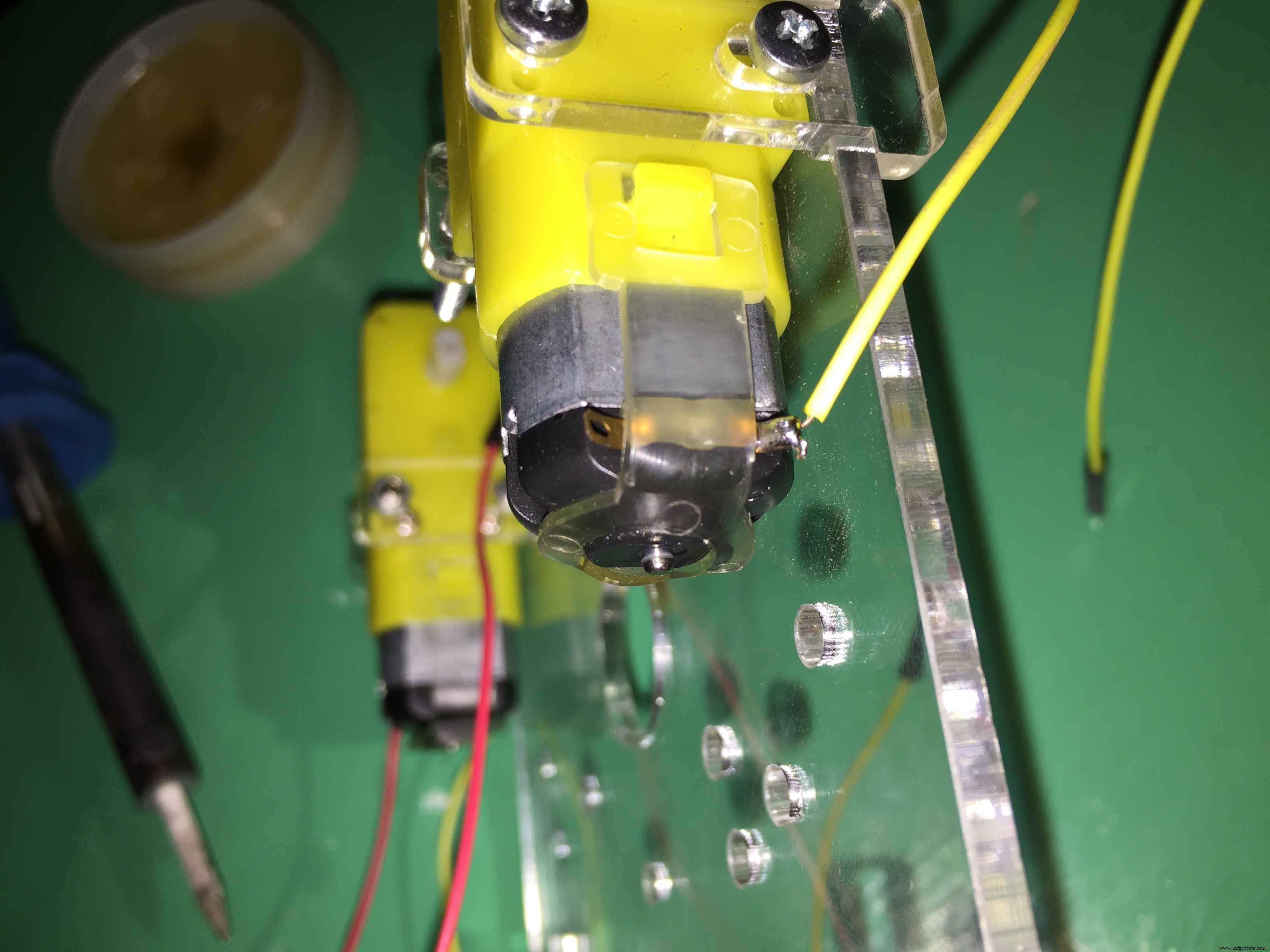
5) Die Gleichstrommotoren
Sie müssen einige Drähte an den Motorklemmen anlöten, um diese Motoren verwenden zu können.
Der Gleichstrommotor hat keine Polarität. Es gibt kein Positiv und kein Negativ. Wenn Sie Ihre Motoranschlüsse vertauschen, ändert sich die Bewegungsrichtung des Motors.

Nachdem Sie die Motorklemmen gelötet haben, verbinden Sie diese Klemmen mit der Motorabschirmung.

HINWEIS:In Der Arduino-Code, ich gebrauchter Motor 1 und Motor 2 - nicht Motor 3 und Motor 4.
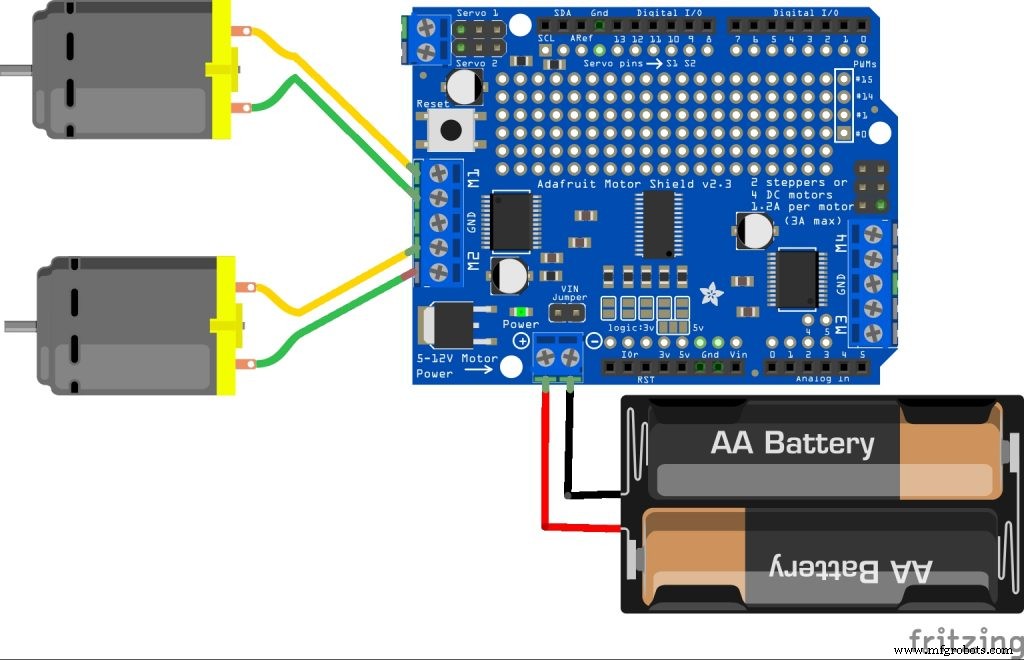
Der Schaltplan
So verbinden Sie die Robotermotoren und den Akku mit dem Motortreiber.
So verbinden Sie die Arm-Servomotoren und die Batterie mit dem Arduino-Board.
Wie man das Bluetooth-Modul mit dem Arduino-Board verbindet.
HINWEIS:Trennen Sie das Bluetooth-Modul (entfernen Sie den RED WIRE +5-Pin), während Sie den Code auf das Arduino-Board hochladen. Verbinden Sie es dann wieder, nachdem der Hochladevorgang abgeschlossen ist.
Code
- Arduino-Code für Roboter auswählen und platzieren
Pick-and-Place-Roboter-Arduino-CodeArduino
#include#include AF_DCMotor motorR(1);AF_DCMotor motorL(2);Servo angleServo;Servo gripperServo;int command;void setup() {gripperServo.attach(9); EllenbogenServo.attach (10); Serial.begin (9600); motorR.setSpeed (255); motorL.setSpeed (255);}void loop () {command =Serial.read (); /* ARM Code */if(command>=1 &&command <=180) //Ellbogenservo bewegen sich entsprechend der Daumenposition in der Mob-App zwischen 0 - 180.{ ElbowServo.write(command);}else if ( Befehl ==205) // Greifer bewegt sich zu Winkel 0 { gripperServo.write (0);} sonst if (Befehl ==206) // Greifer bewegt sich zum Winkel 90 { gripperServo.write (90); } Sonst if (Befehl ==207) // Greifer bewegt sich in Winkel 180 {gripperServo.write(180);} /* CAR CODE */ else if (Befehl ==200) { motorR.run (FORWARD); motorL.run(FORWARD);}sonst if(command ==201){ motorR.run(FORWARD); motorL.run(RÜCKWÄRTS); } Sonst if (Befehl ==202) { motorR.run (RELEASE); motorL.run(RELEASE); } Sonst if (Befehl ==203) { motorR.run (BACKWARD); motorL.run(FORWARD); } Sonst if (Befehl ==204) { motorR.run (BACKWARD); motorL.run(RÜCKWÄRTS); } Sonst if (Befehl ==0) { motorR.run (RELEASE); motorL.run(RELEASE); }}
Schaltpläne
Diese App läuft nur auf Android-Handys.U Muss Bluetooth einschalten, bevor Sie diese App verwenden
Bevor Sie das Bluetooth-Modul aus der App auswählen, koppeln Sie Ihr Mobiltelefon mit dem Bluetooth-Modul in den Einstellungen Ihres Telefons ieee_aast_aswan_test1_xVVlPTtt8n.apk
Herstellungsprozess
- Raspberry Pi Roboter über Bluetooth gesteuert
- Bauen Sie Ihren internetgesteuerten Videostreaming-Roboter mit Arduino und Raspberry Pi
- WLAN-gesteuerter Roboter mit Raspberry Pi
- Benutzerdefinierte 3D-Druck-Kraftstoffeinspritz-Greifer für einen Pick-and-Place-Roboter
- Pick-and-Place-Roboterhersteller in Indien
- Top 10 Lieferanten von Pick-and-Place-Robotern
- Wie Pick-and-Place-Roboter funktionieren
- Pick and Place – ein perfektes Beispiel für den Robotereinsatz mit EasyWork
- Roboter und Batterieherstellung:Eine positive Verbindung
- End-of-Arm-Tooling:Roboter-Pick-and-Place-Anwendungen