


Automatisches Händedesinfektionsmittel
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 19 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Notwendige Werkzeuge und Maschinen
 |
| |||
 |
| |||
|
Apps und Onlinedienste
 |
| |||
| ||||
|
Über dieses Projekt
In den letzten Monaten hat die COVID-19-Pandemie auf der ganzen Welt Chaos verbreitet. Es gibt unzählige Infektionen und leider viele Verletzte. Eine der wichtigsten von der Weltgesundheitsorganisation vorgeschlagenen Maßnahmen ist das ständige Händewaschen mit Seife oder Handdesinfektionsmitteln. Aber eines der größten Probleme ist die Art und Weise, wie wir es tun, und zwar durch das physische Berühren des Spenders, was den gesamten Zweck der Aktion aufhebt und sogar ein großes Infektionsrisiko darstellt. Also ich ,ein 14-jähriger Junge , beschloss, mit einem Arduino Nano-Board etwas zu entwickeln, das dieses Problem bekämpfen könnte, aber ich wollte auch, dass es billig ist und einfach, schnell und effektiv an vielen verschiedenen Spendern befestigt werden kann! Und genau das habe ich gemacht, ein Zubehör, das an den meisten Handdesinfektions-/Seifenspendern angebracht werden kann und drehe sie komplett freihändig und automatisch
Sehen Sie sich zuerst dieses Video an, um das Gerät in Aktion zu sehen und auch zu verstehen, wie es funktioniert und wie es hergestellt wurde!
Schritt 1:Den Mechanismus verstehen
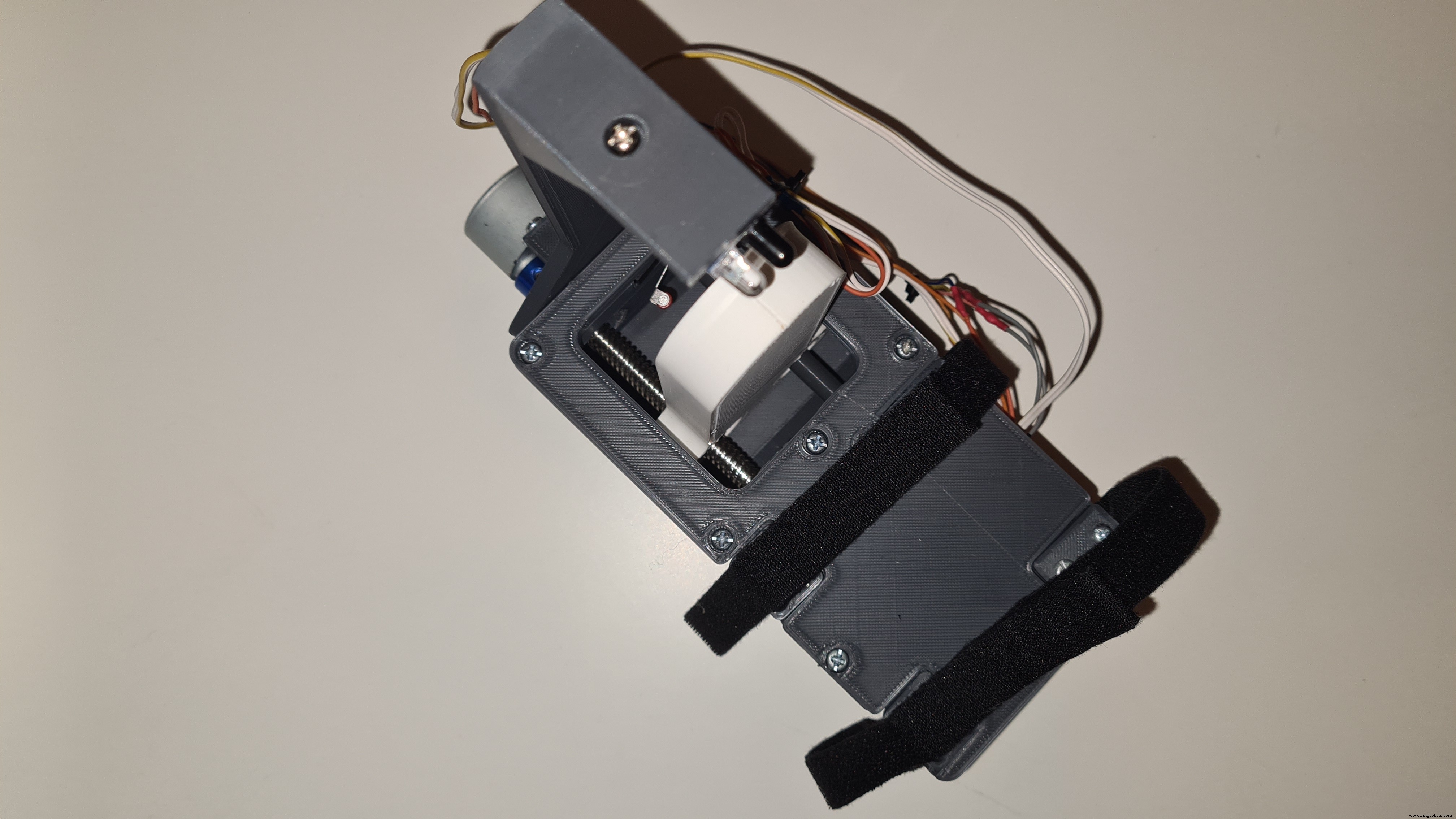


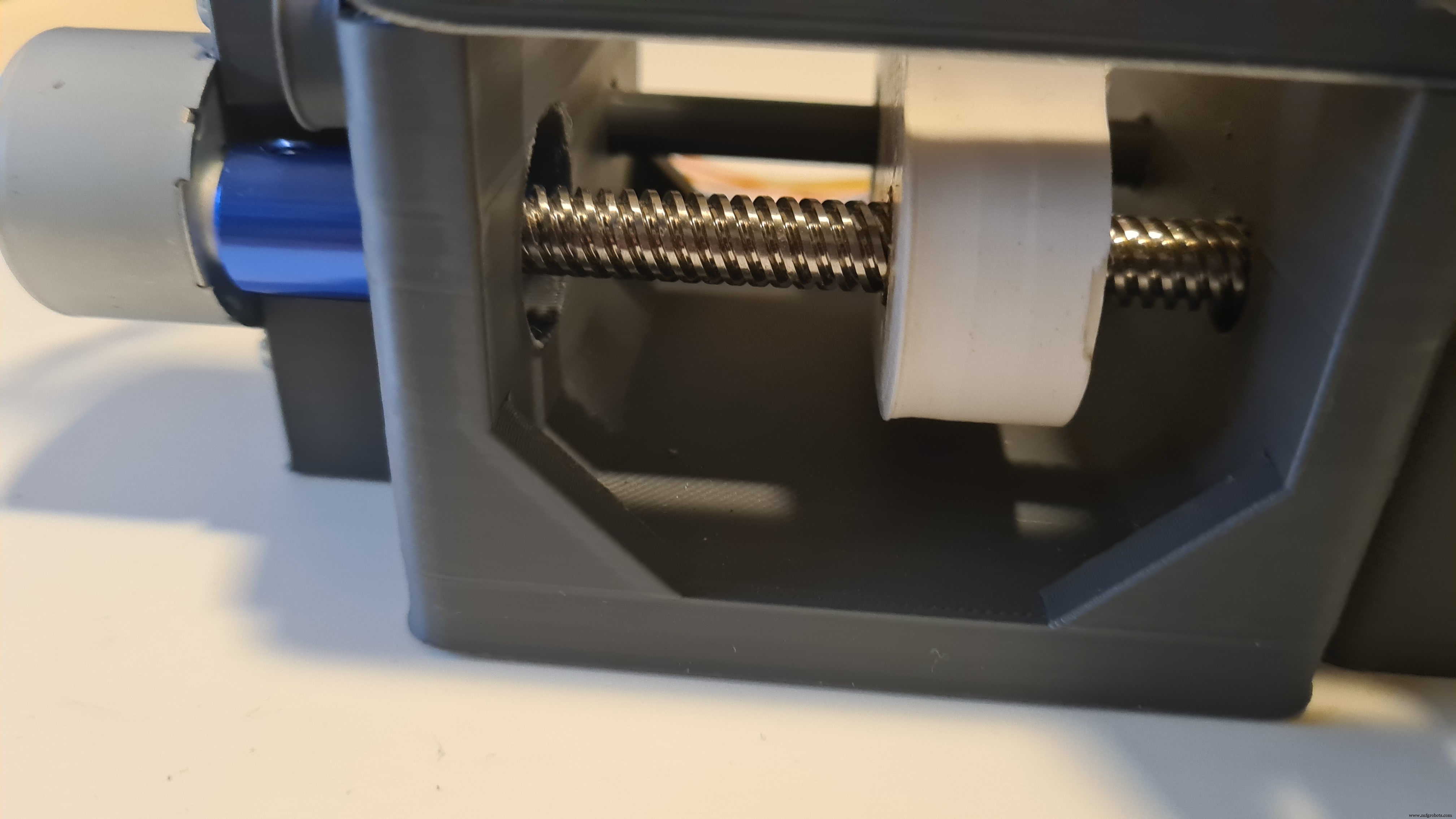
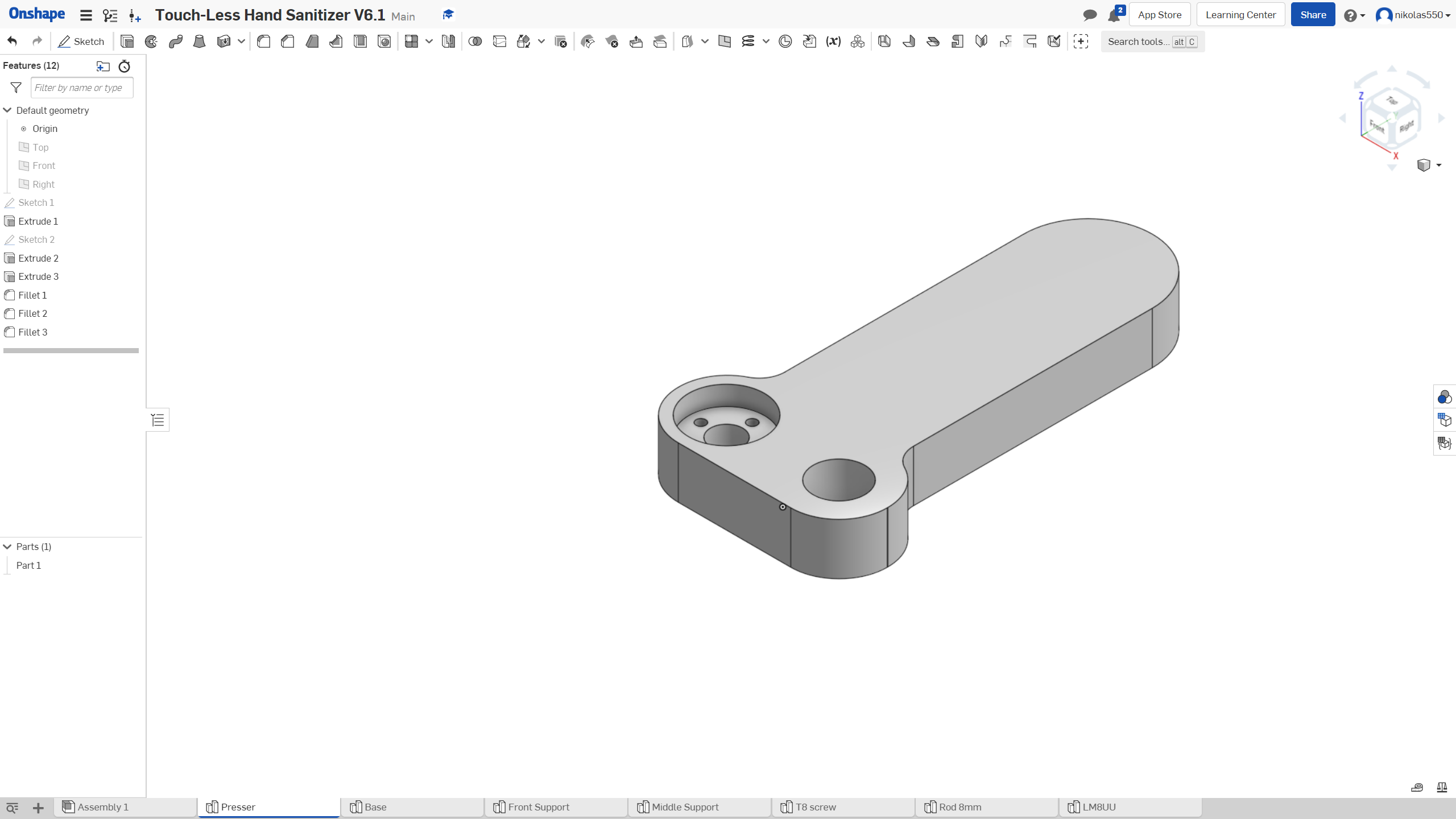
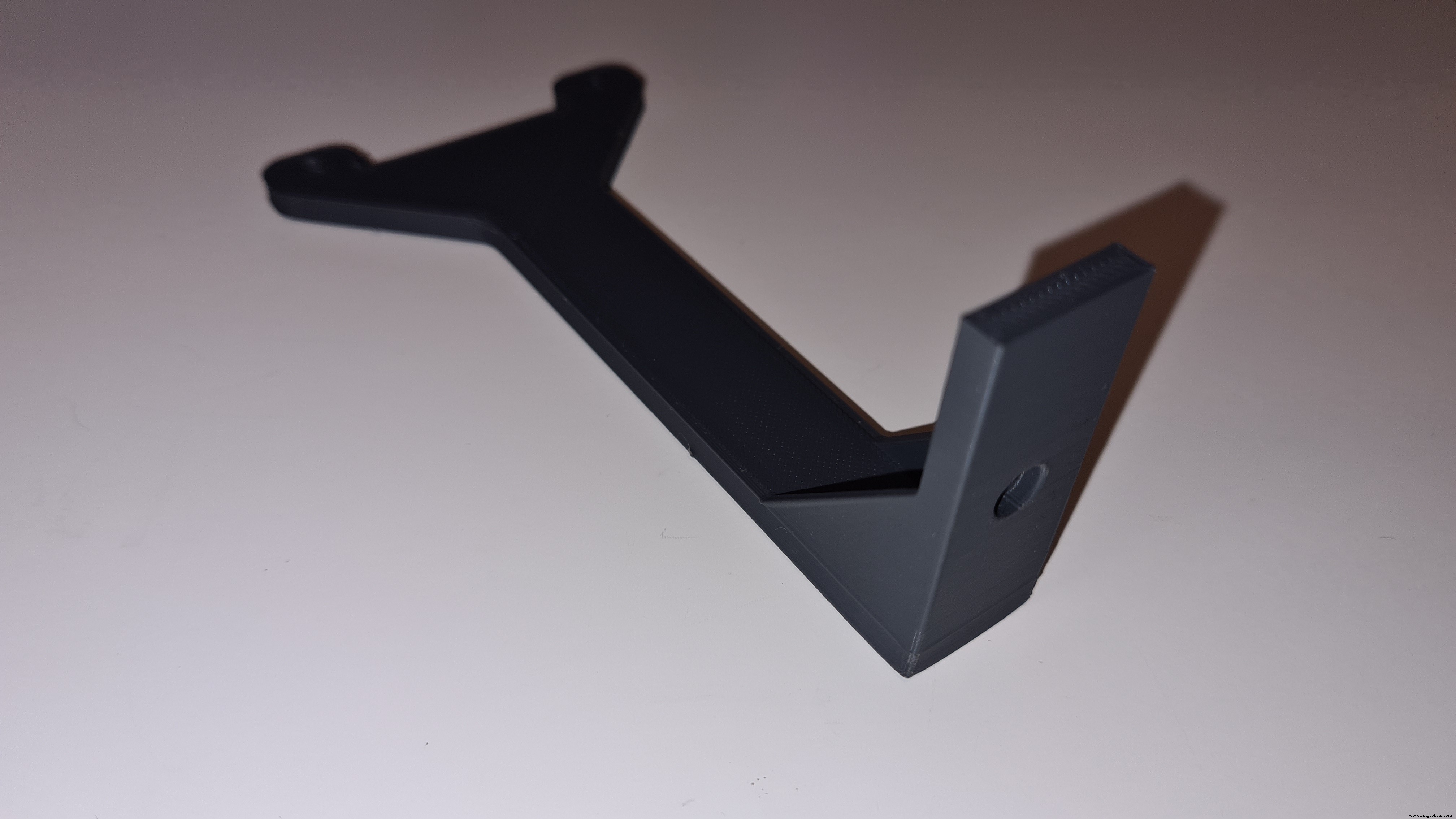
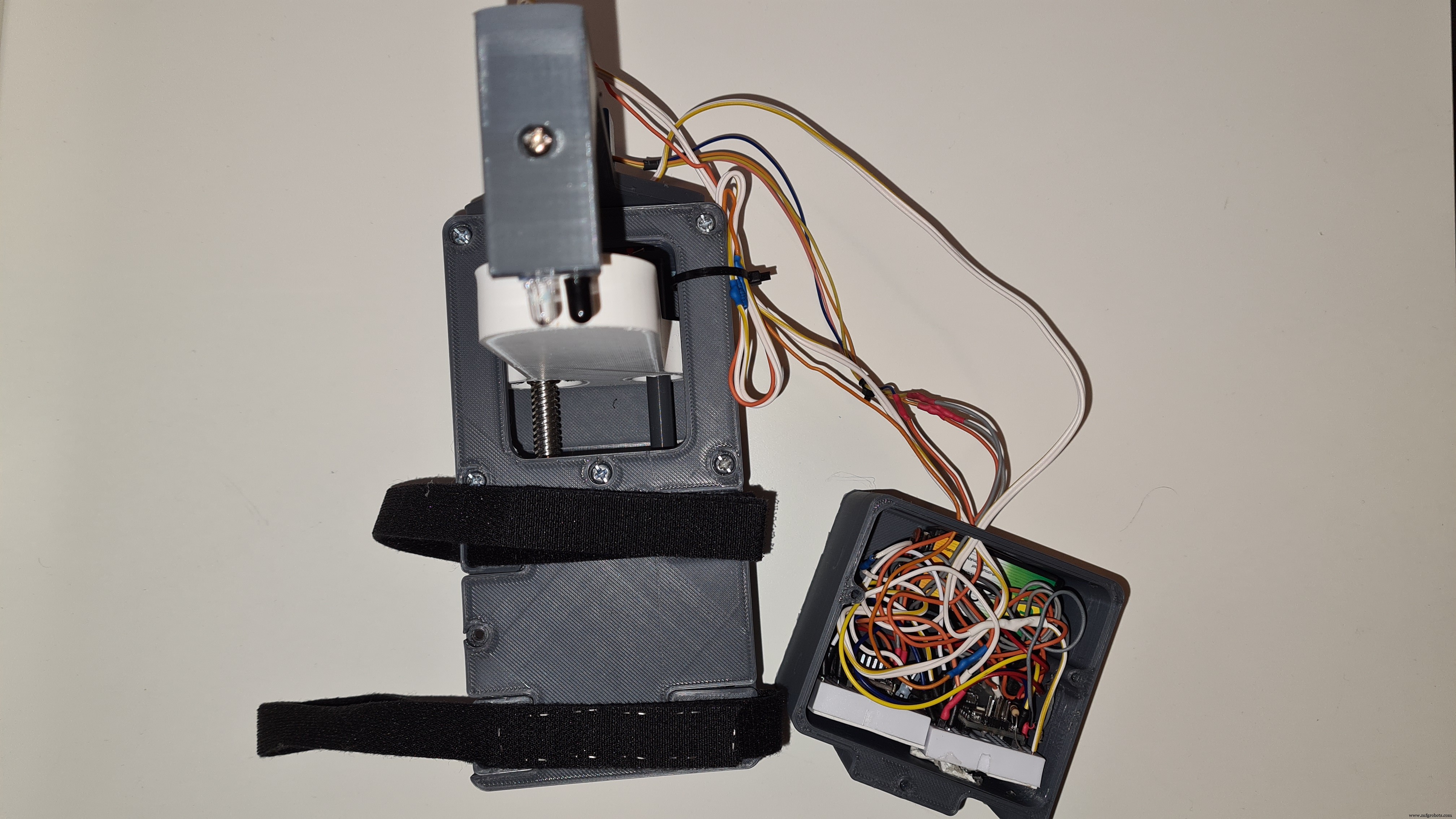
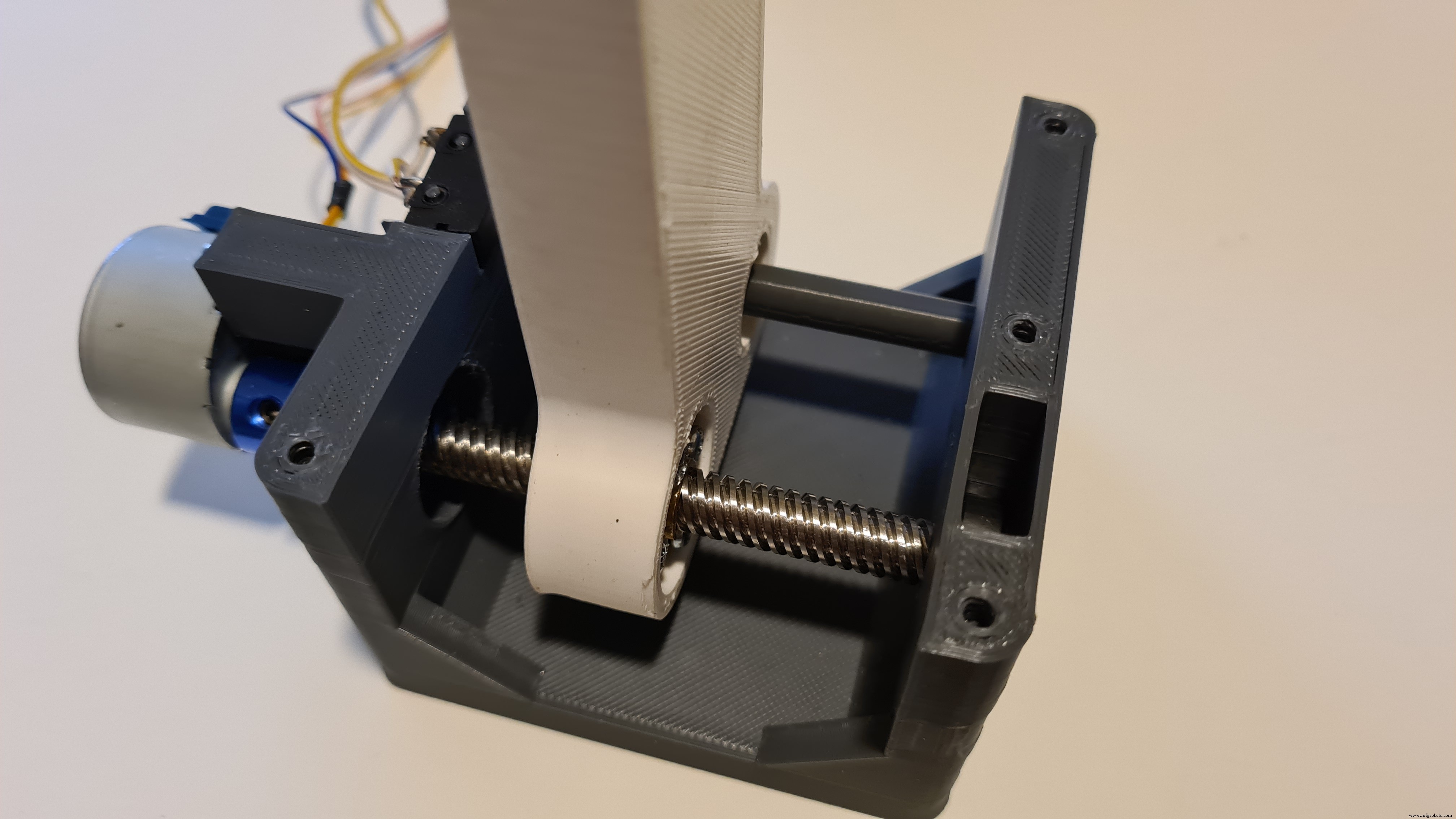
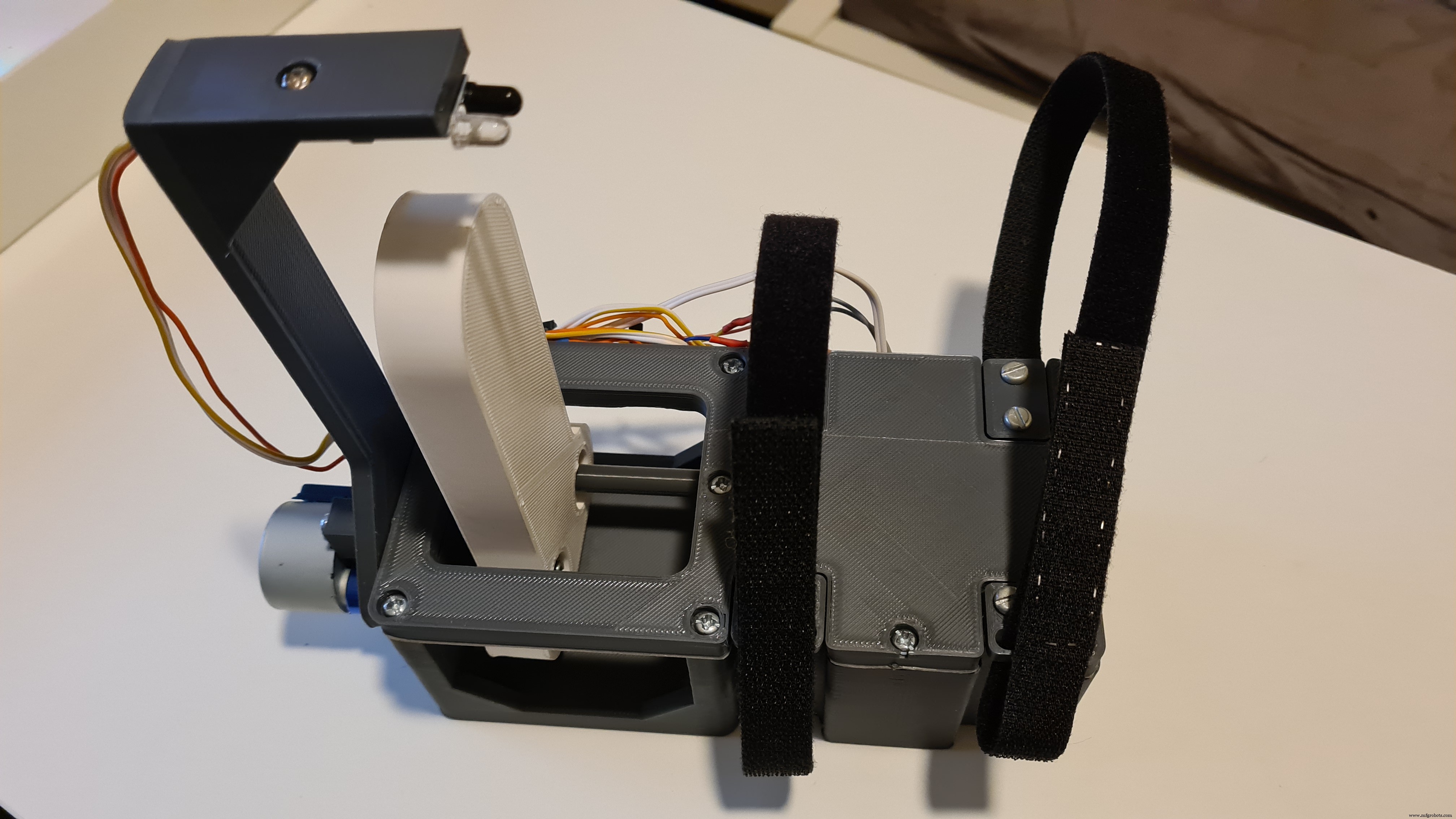
Im Grunde wird also ein Schrittmotor mit einer Kupplung an eine Schraube angeschlossen. Dann wird der 3D-gedruckte Drücker auf der einen Seite über eine Mutter mit der Schraube verbunden und auf der anderen Seite von einem 3D-gedruckten Stab getragen. Die Stange lässt nicht zu, dass die Rotationskraft der Schraube den Nähfuß dreht und stattdessen bewegt sich der Nähfuß linear . Auf diese Weise können wir dem Stepper befehlen, sich in jede Richtung (vor und zurück), mit jeder Geschwindigkeit und für beliebig viele Schritte zu bewegen.
Schritt 2:Verstehen Sie, wie das Gerät funktioniert


Das Konzept besteht darin, dass, wenn der IR-Hindernissensor, der am 3D-gedruckten IR-Halter befestigt ist, aktiviert wird, indem Sie einfach Ihre Hand einige Zentimeter darunter legen, der Presser um eine festgelegte Strecke nach unten geht (Drücken des Spenders) und 2 . wartet Sekunden und kehrt dann durch einfaches Hochfahren in die Ausgangsposition zurück, bis der Endschalter aktiviert wird. Wenn das Gerät zum ersten Mal eingeschaltet wird, fährt der Nähfuß nach oben, bis der Schalter aktiviert wird, und stoppt dann dort, als eine Art Selbstkalibrierung, damit der Nähfuß einsatzbereit ist.


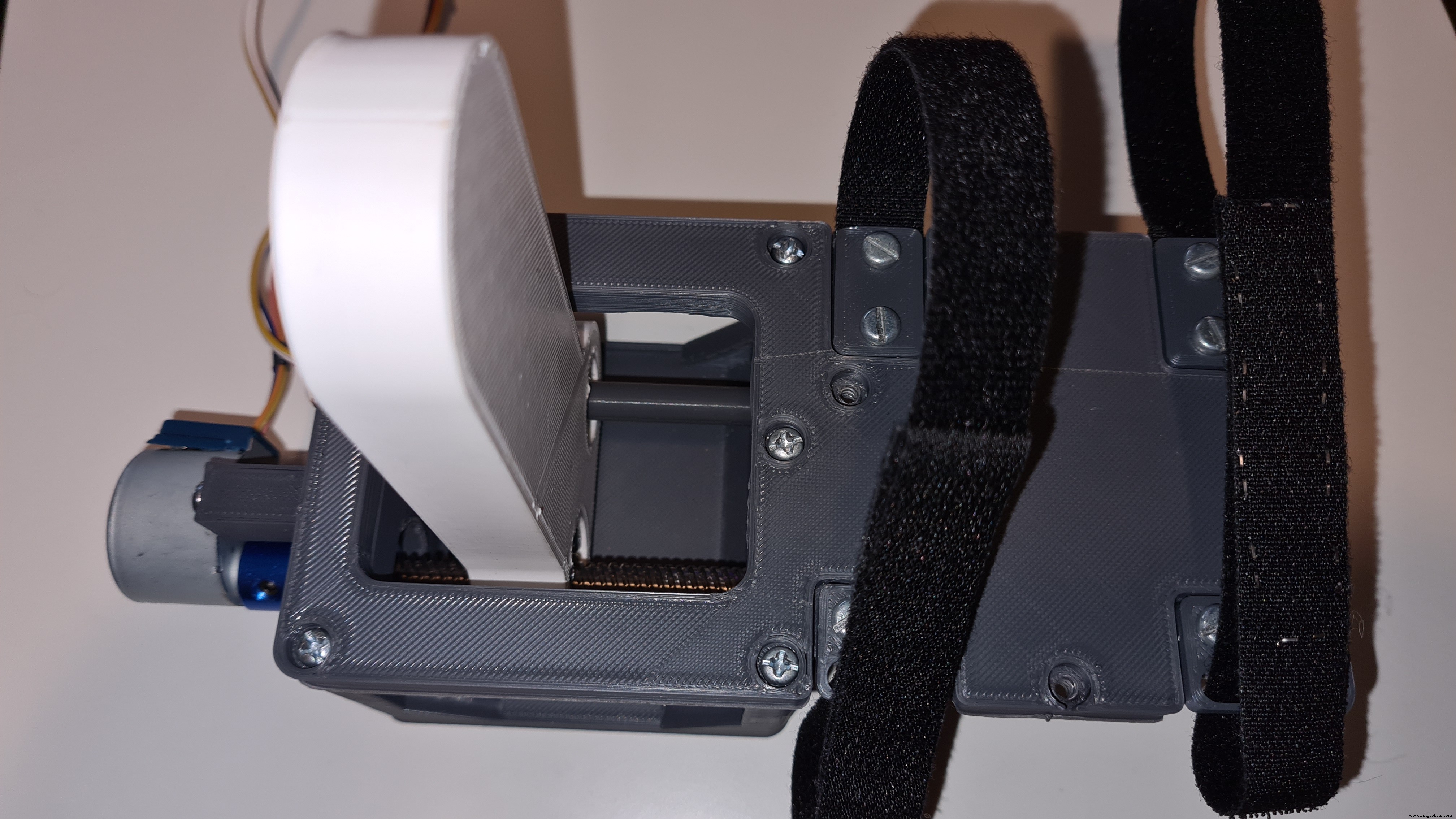
Dann wickeln Sie mit den Klettverschlüssen das Händedesinfektionsmittel Ihrer Wahl ein und ziehen es so fest wie möglich.
Jetzt ist der automatische Händedesinfektionsspender funktionsfähig!!
Schritt 3:Sammeln Sie die notwendigen Komponenten
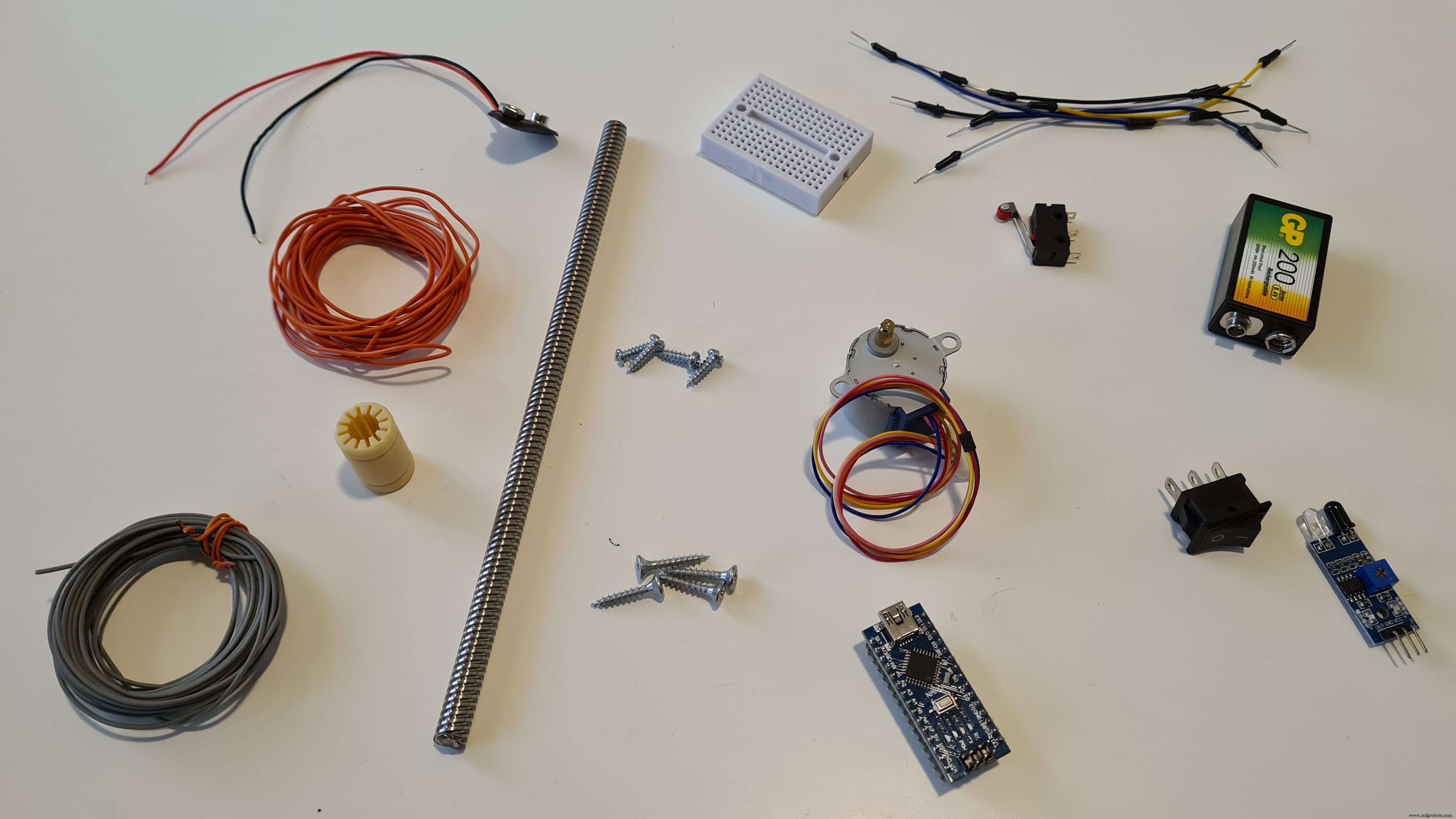
Alle Links der notwendigen Komponenten befinden sich im Abschnitt "Dinge".
Schritt 4:Entwerfen Sie benutzerdefinierte Teile
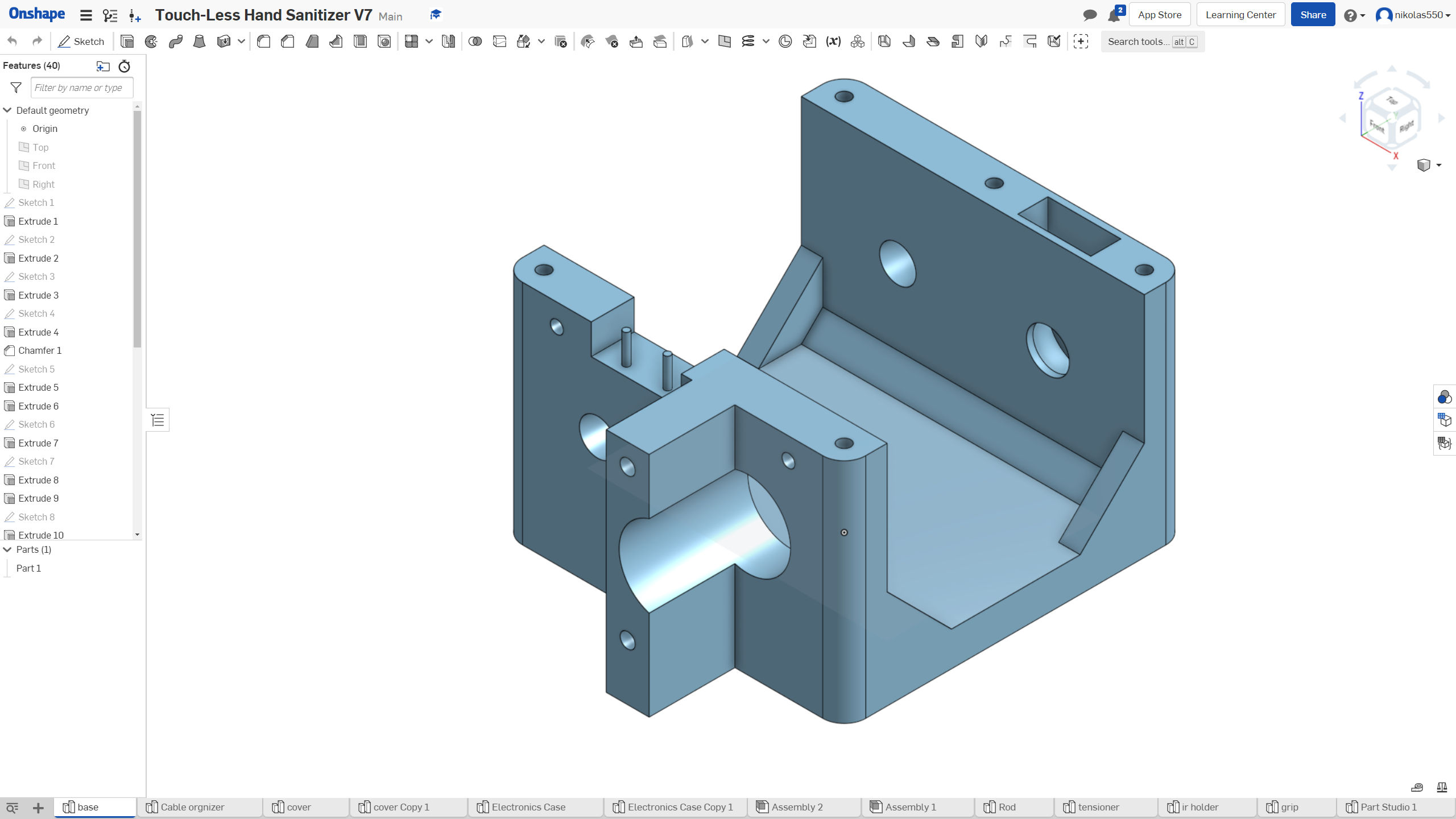
Alle 3D-gedruckten Teile wurden von mir auf Onshape entworfen, aber Sie müssen sich keine Sorgen um das 3D-Design machen, da ich alle .stl-Dateien im Abschnitt "Anhänge" bereitgestellt habe.
Schritt 5:3D-Druck von benutzerdefinierten Kunststoffteilen
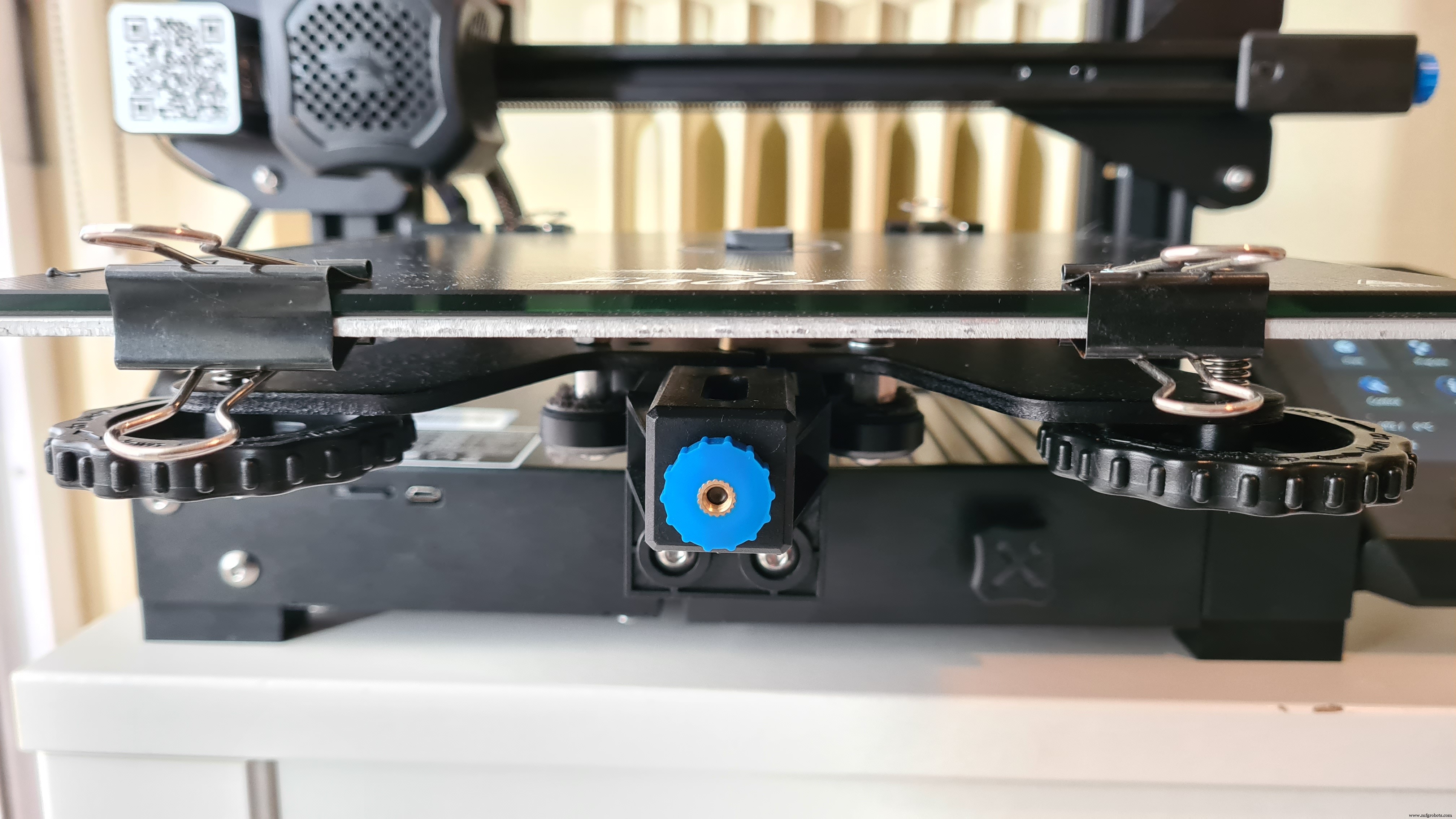




Ich habe die Teile auf meinem Creality3D Ender 3 V2 in Grau und Weiß PLA mit 0,2 mm Schichthöhe und 20% Infill 3D gedruckt. Wenn Sie keinen Zugang zu einem 3D-Drucker haben, können Sie es mit Pappe oder Holz versuchen.
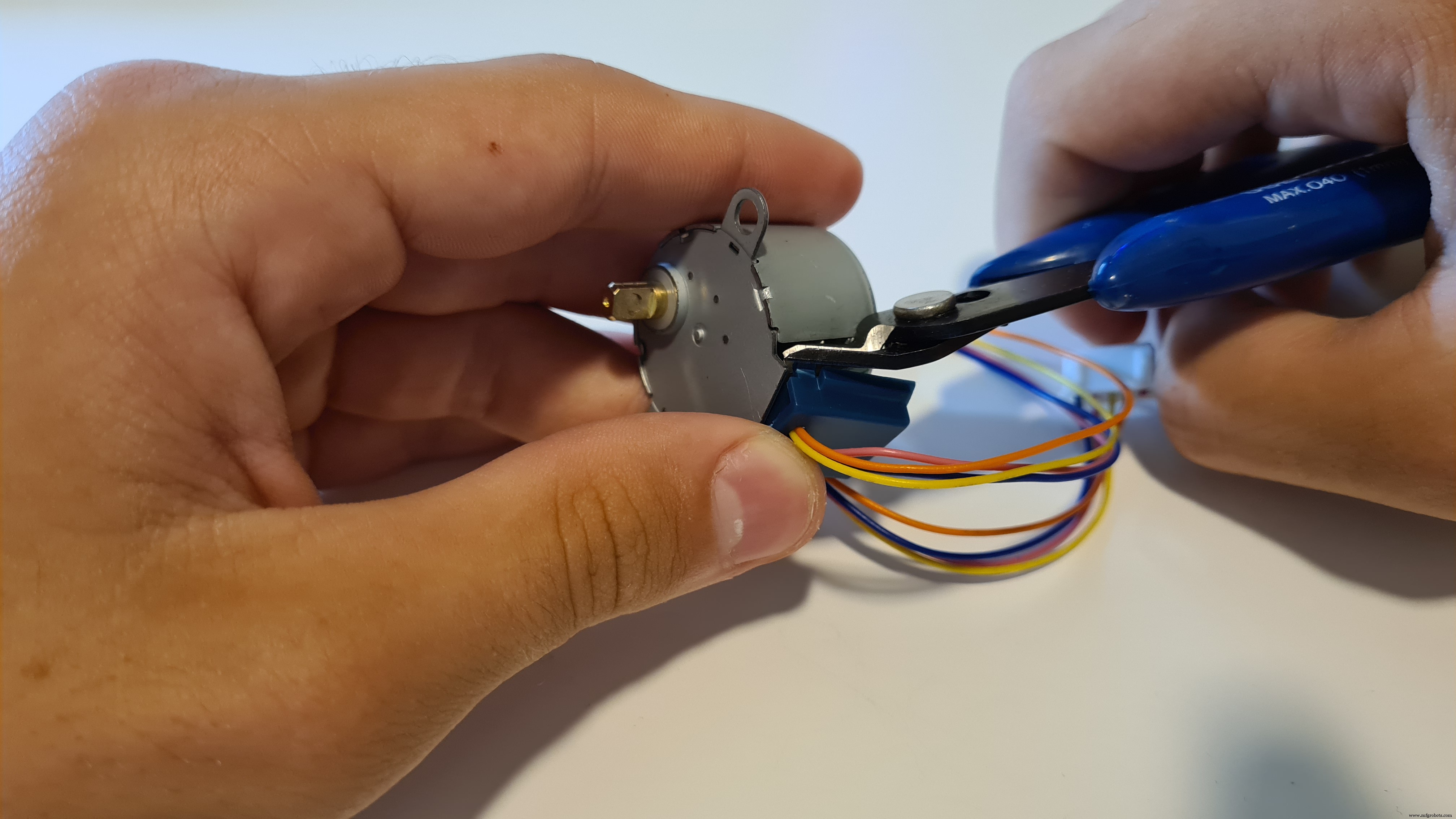
Schritt 6:Modifizieren des Steppers

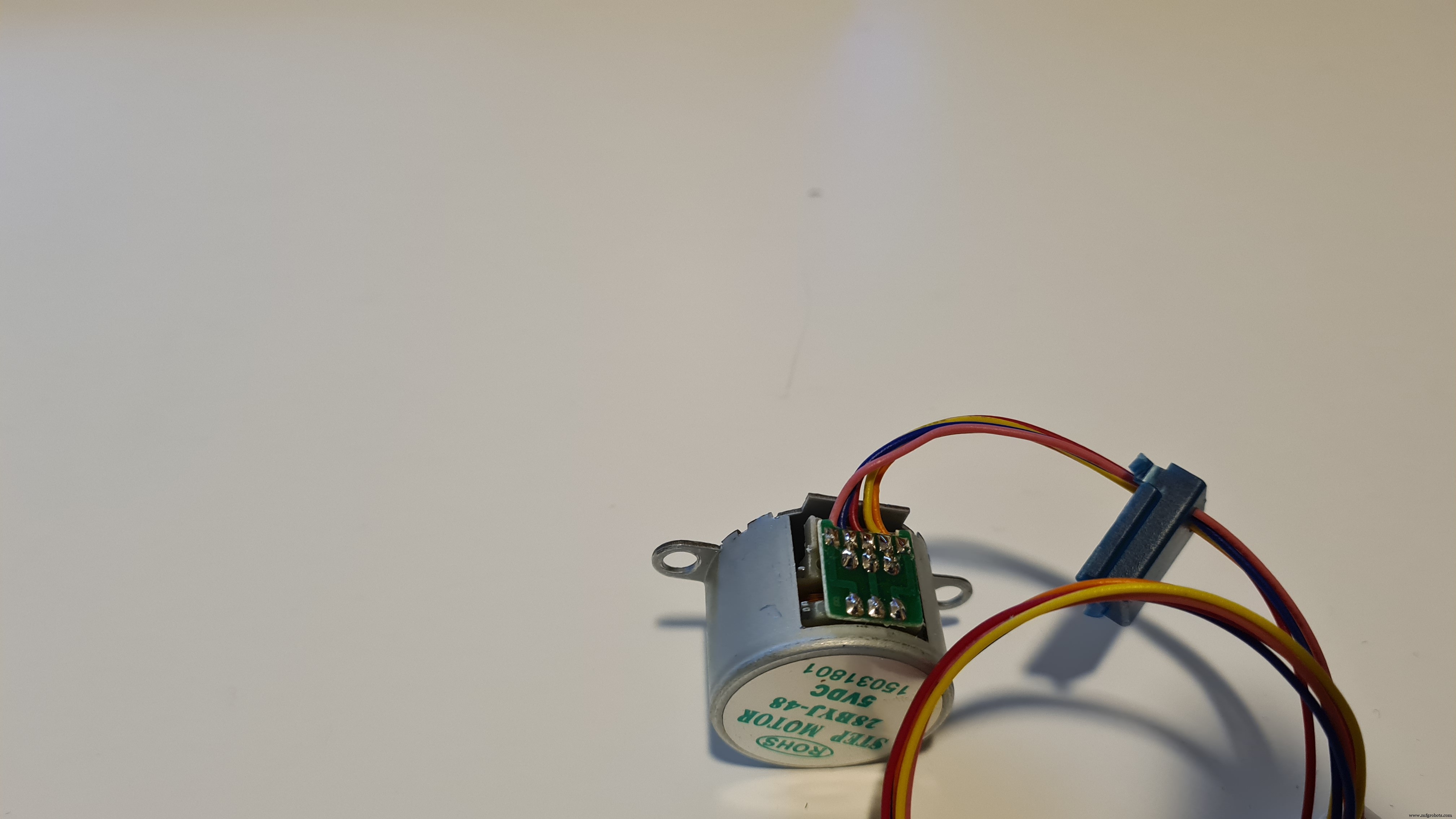
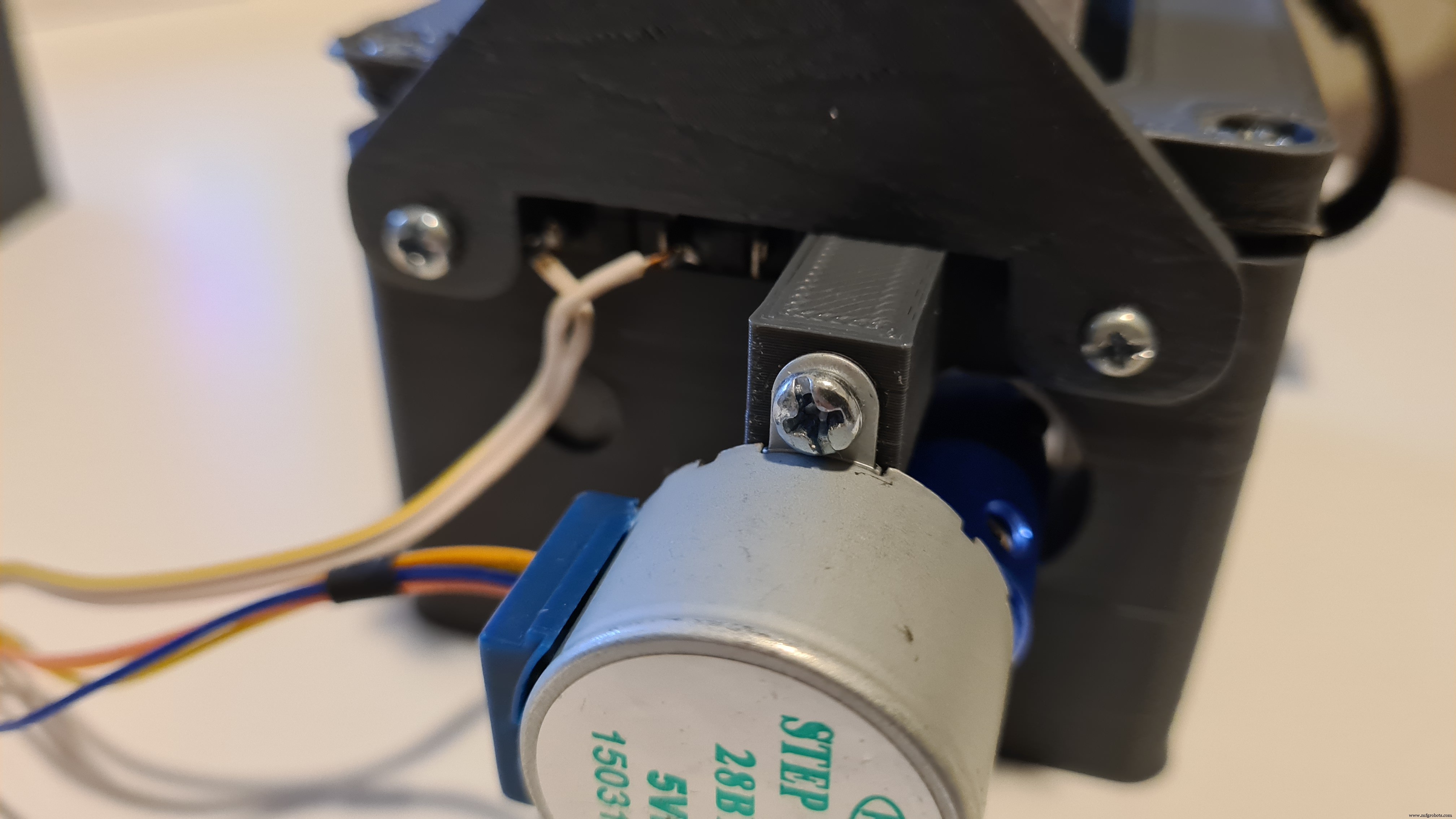
Der Schrittmotor 28BYJ-48 ist ein kleiner und wirklich günstiger Schrittmotor. Es ist ein unipolarer Schrittmotor und hat ein Drehmoment von ca. 300 g/cm was mit unserem Projekt funktioniert, aber ich möchte, dass es stärker ist, um bessere Ergebnisse zu erzielen. Wir können das Drehmoment auf 800+ g/cm erhöhen durch Konvertieren es zu einem bipolaren Motor mit einem einfachen und einfachen Mod!
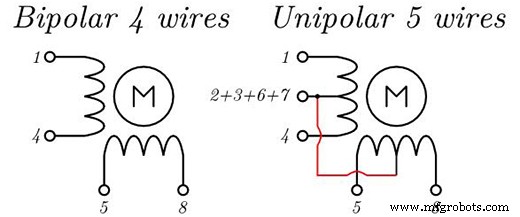
Bipolare Stepper haben größere Spulen und dadurch viel mehr Drehmoment .

Zuerst möchten Sie die blaue Abdeckung mit einem Schraubendreher entfernen.
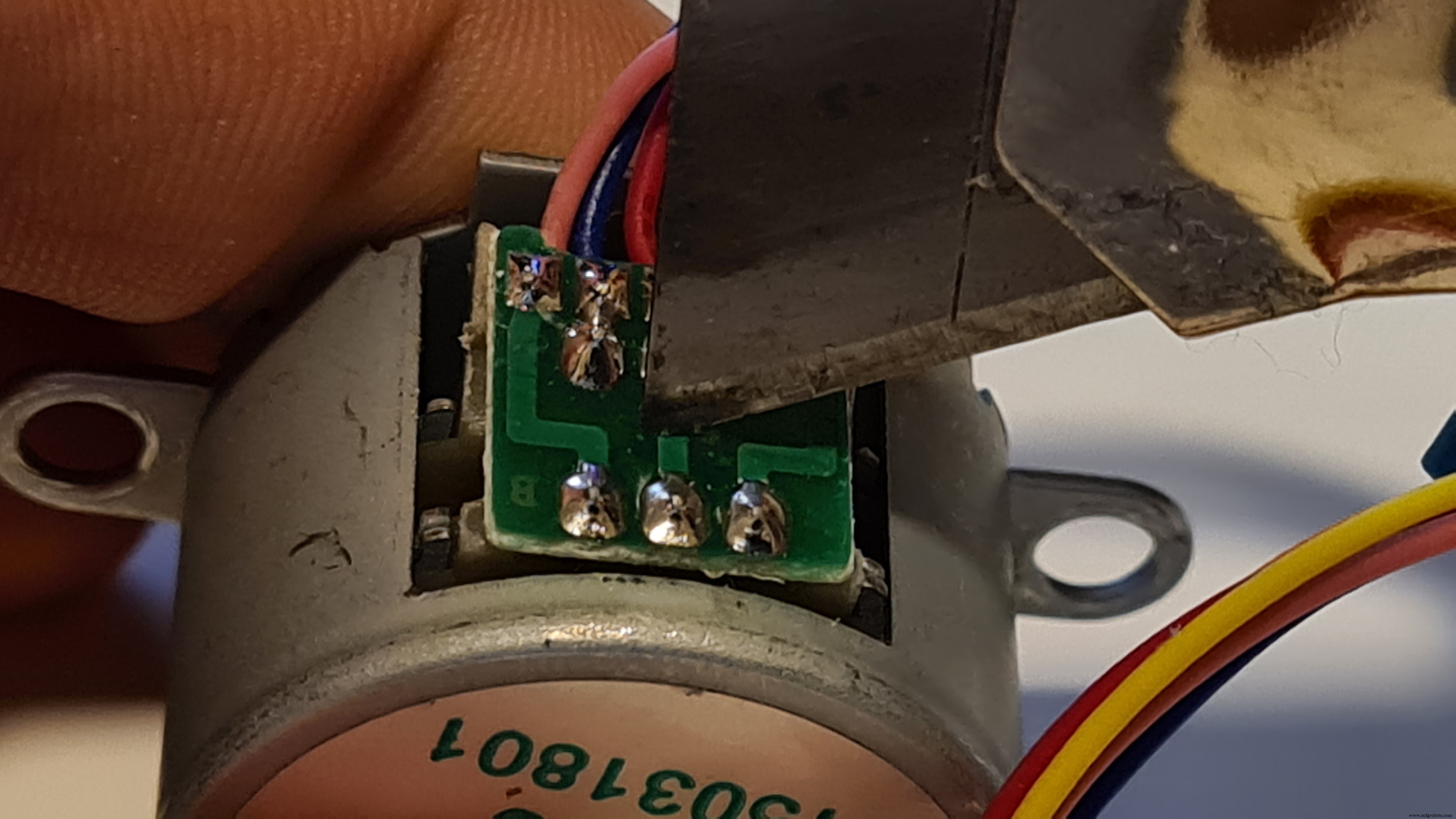
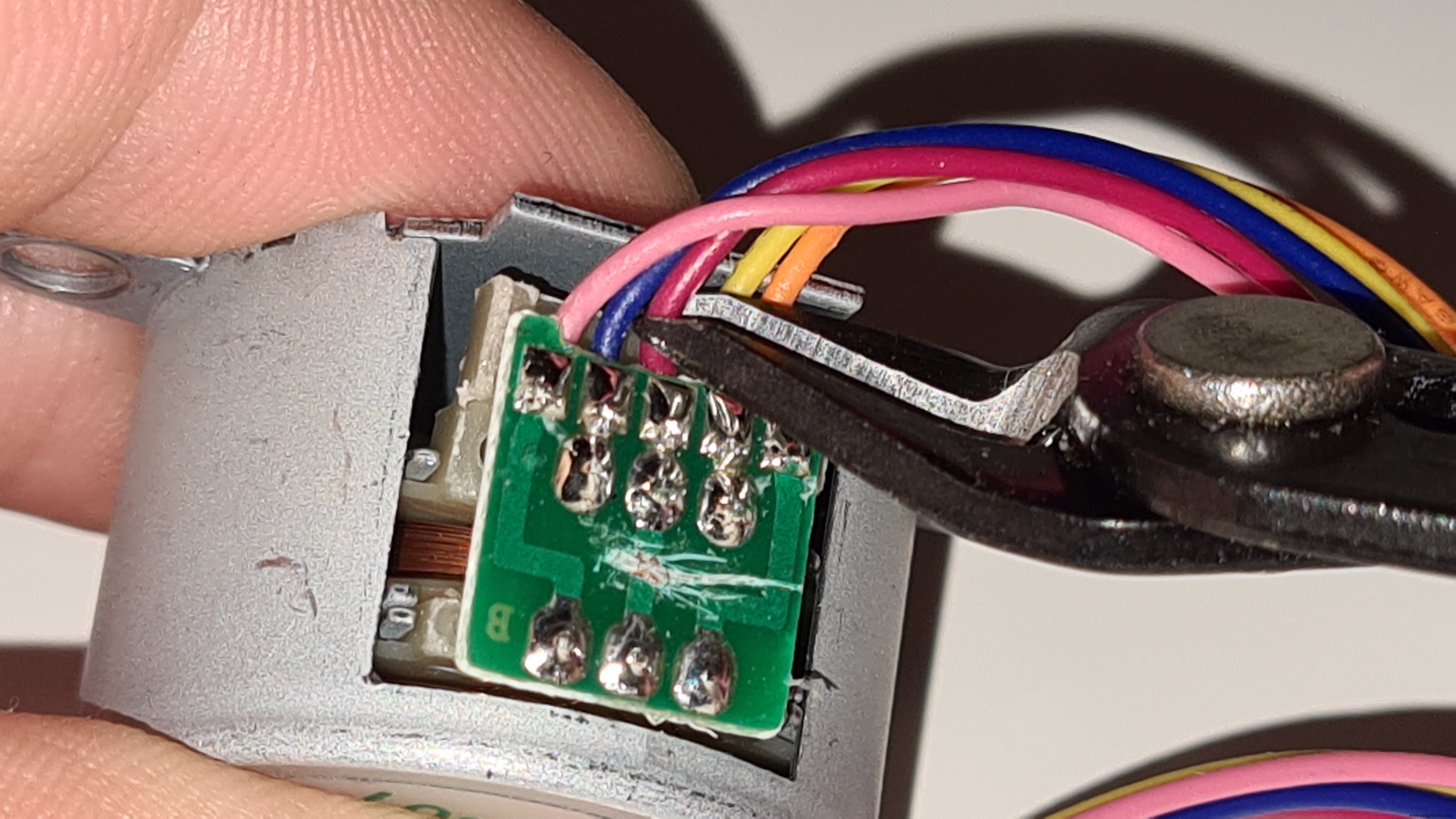
Nach dem Entfernen möchten Sie die mittlere Spur, die bis zum roten Draht führt, mit einem Messer vollständig abschneiden.
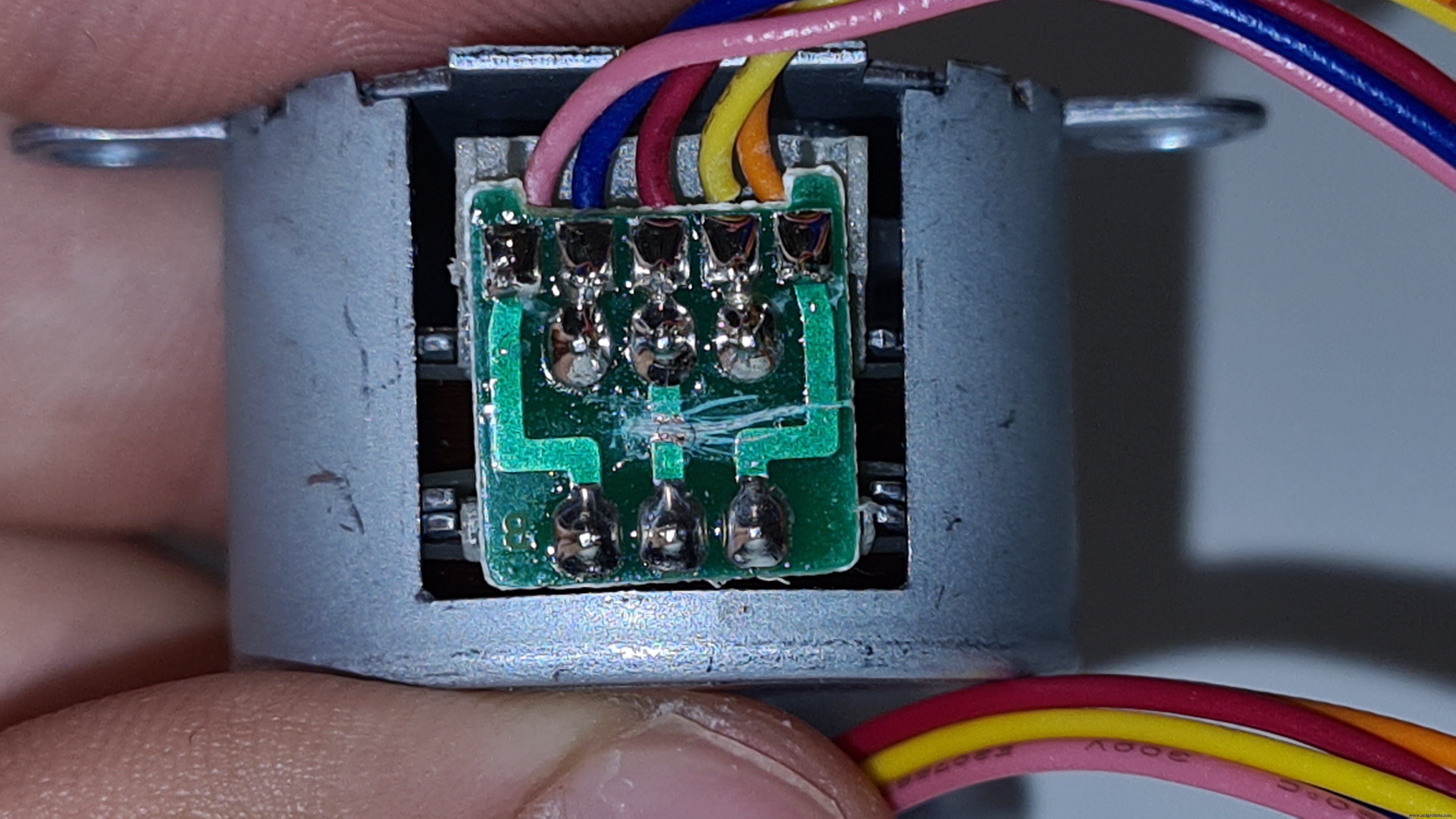
Sie möchten sicherstellen, dass es nicht ist überhaupt nicht mehr verbinden.
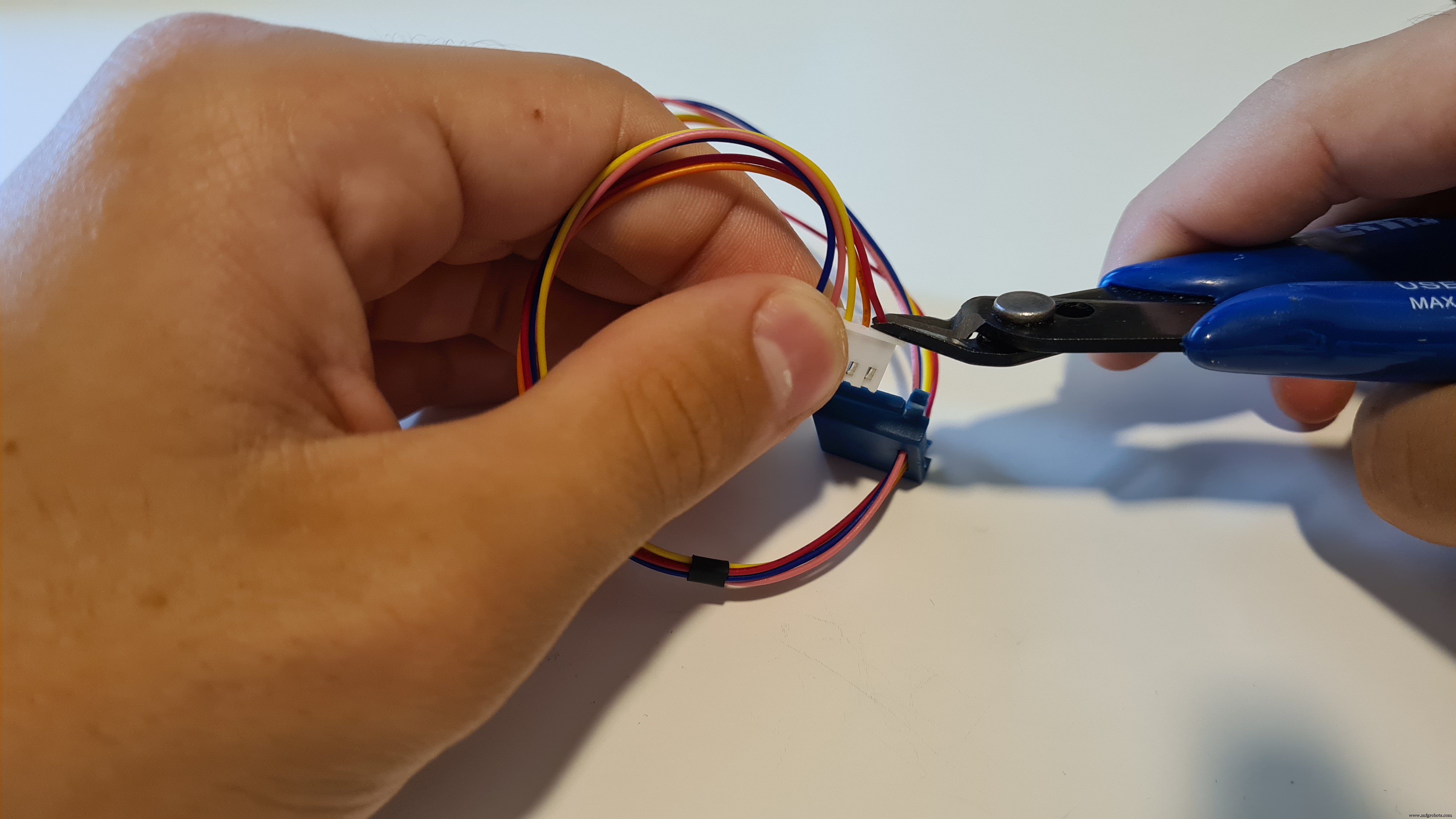
Jetzt können Sie das rote Kabel von beiden Seiten abschneiden.
Sie können die blaue Abdeckung jetzt wieder anbringen. Ich musste 2 seiner Stützen abschneiden, um es wieder anbringen zu können.
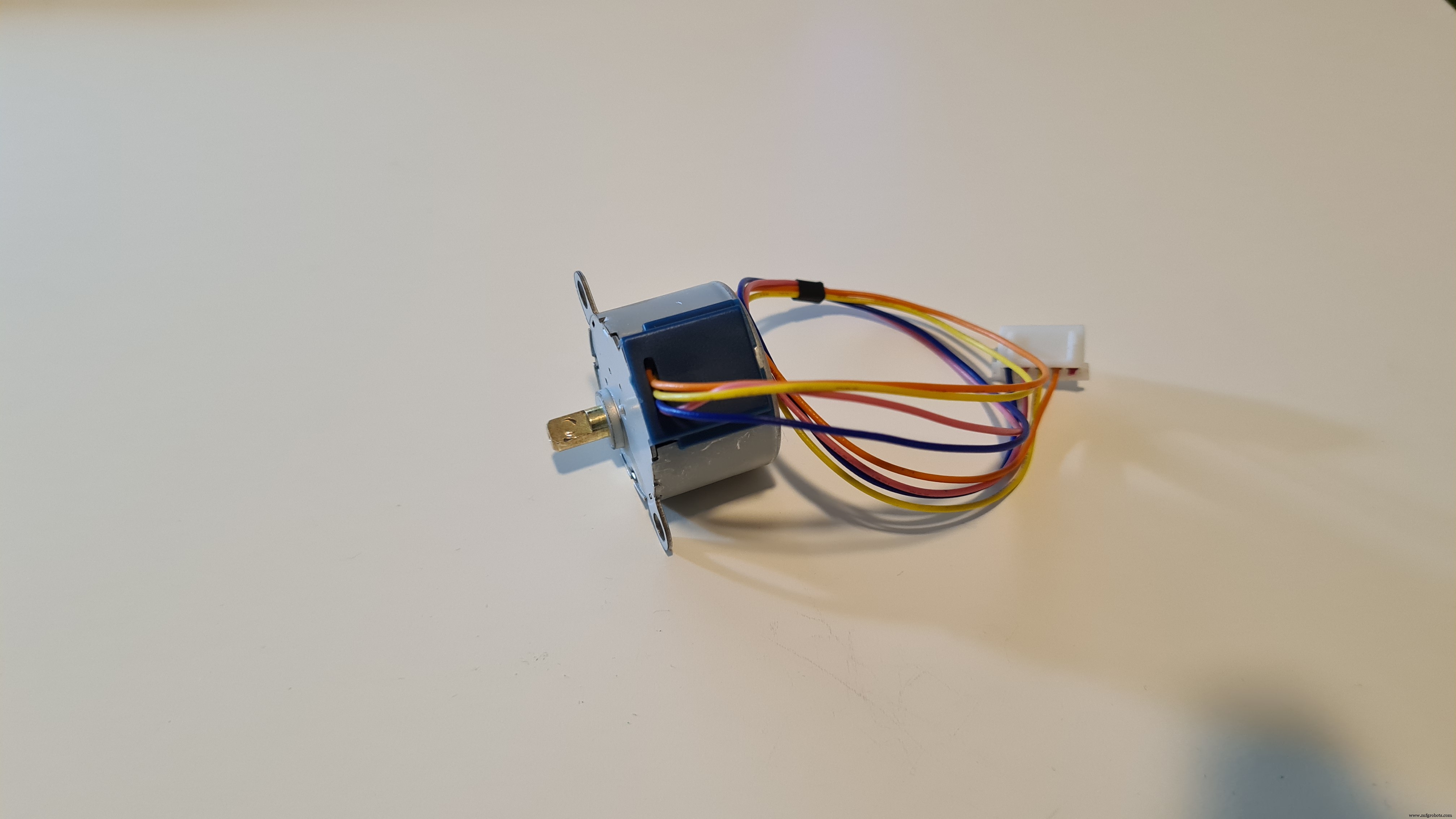
Jetzt haben Sie Ihren eigenen bipolaren 28BYJ-48-Stepper. Es hat ungefähr das 2,5-fache des anfänglichen Drehmoments. Jetzt benötigen Sie jedoch einen bipolaren Schrittmotortreiber wie den DRV8825, den ich verwende. Die Mindestspannungsversorgung für den Treiber beträgt 8,4 V und unser Motor hat eine Nennspannung von 5 V. Aber keine Sorge, die bipolare Version des Motors kann diese Spannung problemlos verarbeiten!
Schritt 7:DIY Klettbänder x2

Es ist Zeit, die Klettbänder herzustellen, mit denen das Zubehör am Spender befestigt wird. Wenn Sie bereits einige Kabelbinder mit Klettverschluss haben, können Sie diese gerne verwenden.

Sie können sie so lang oder so kurz machen, wie Sie möchten, aber ich würde vorschlagen, einen Teil auf 30 cm - 40 cm und den anderen auf 4 cm - 7 cm zu schneiden.

Nun wollen Sie die beiden Teile zusammenheften. Stellen Sie sicher, dass die zusammengehefteten Seiten entweder beide rau oder beide weich sind.
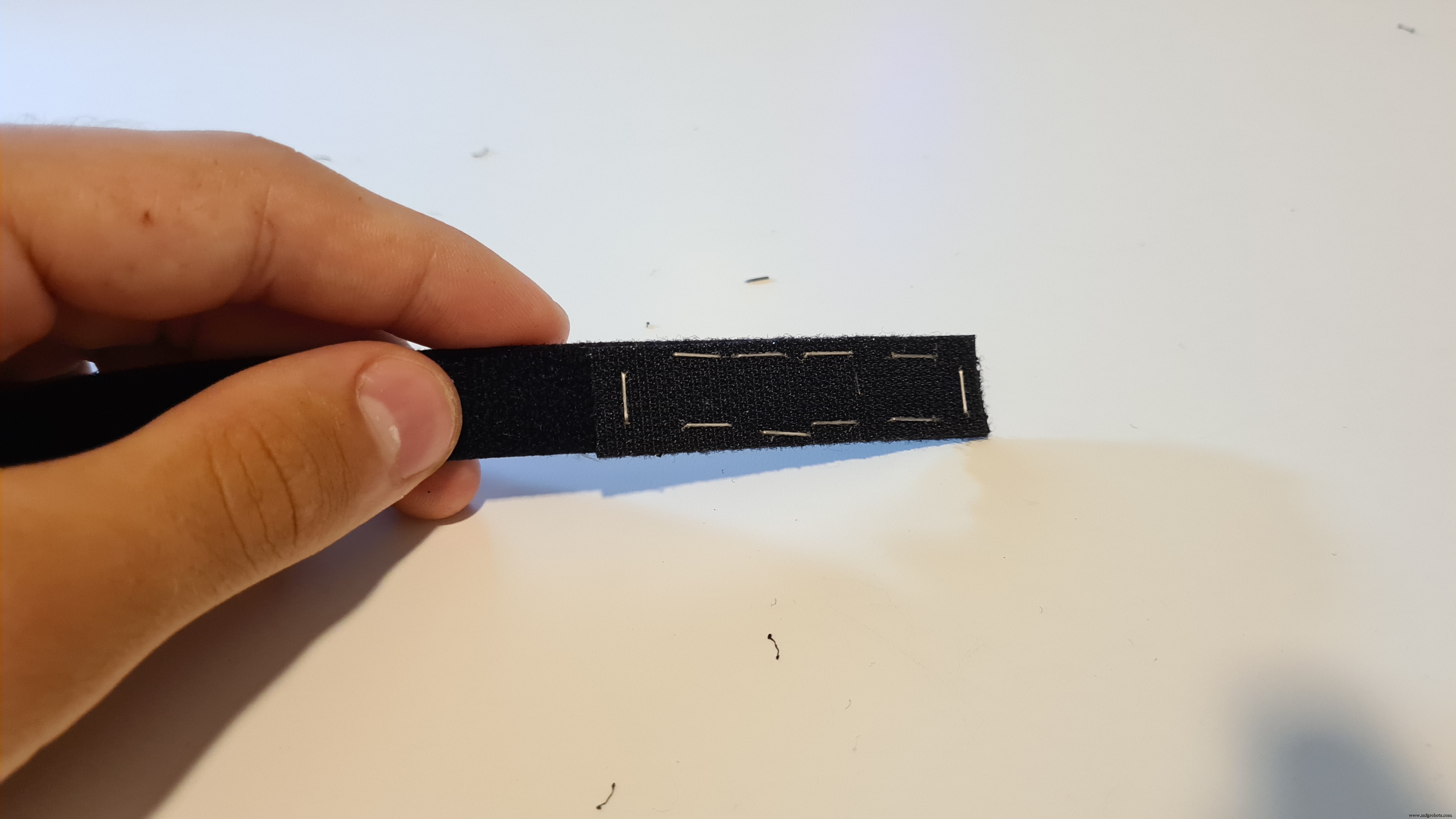
Jetzt ist Ihr Klettverschluss einsatzbereit!


Du brauchst zwei davon.
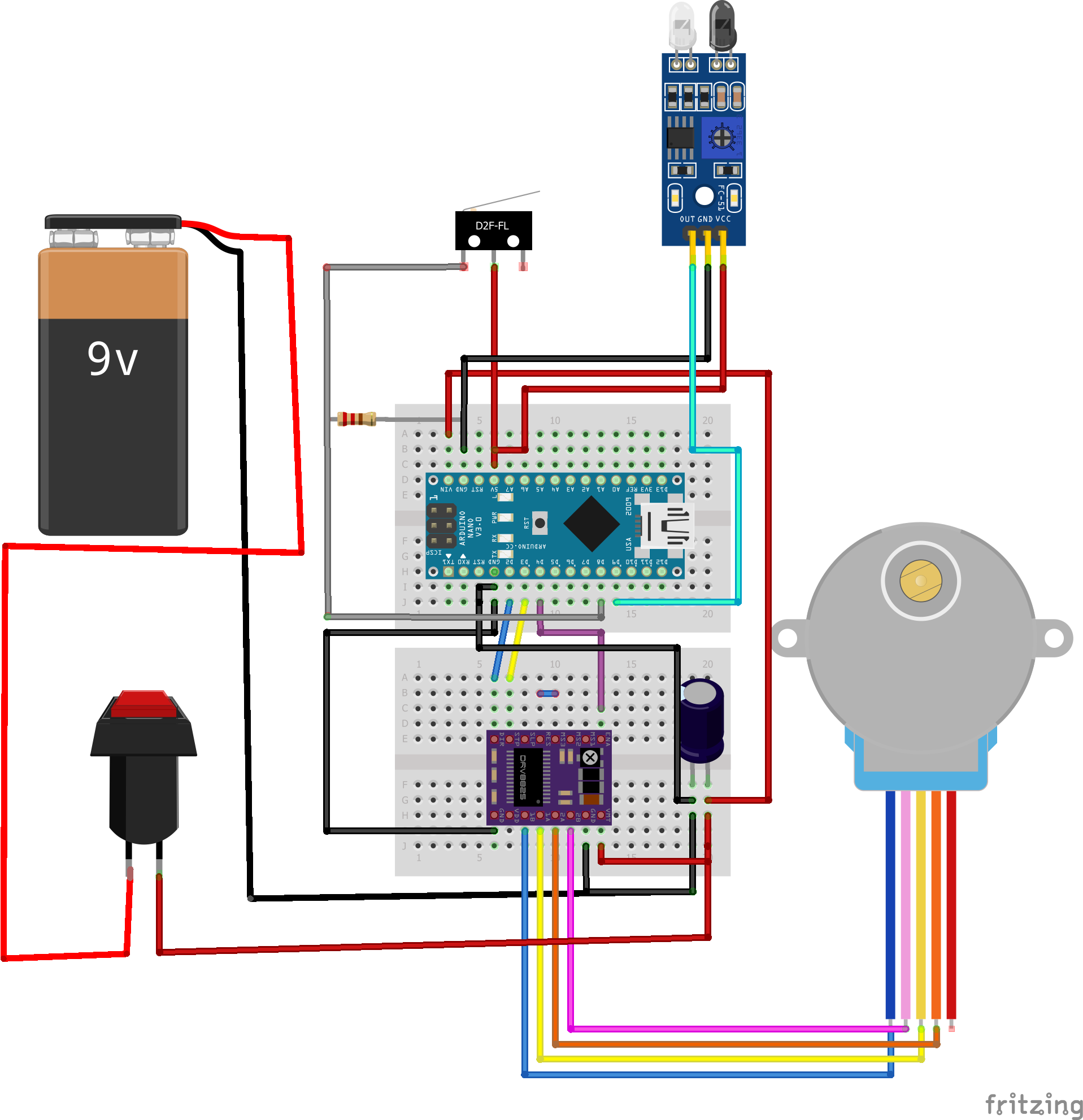
Schritt 8:Schaltung
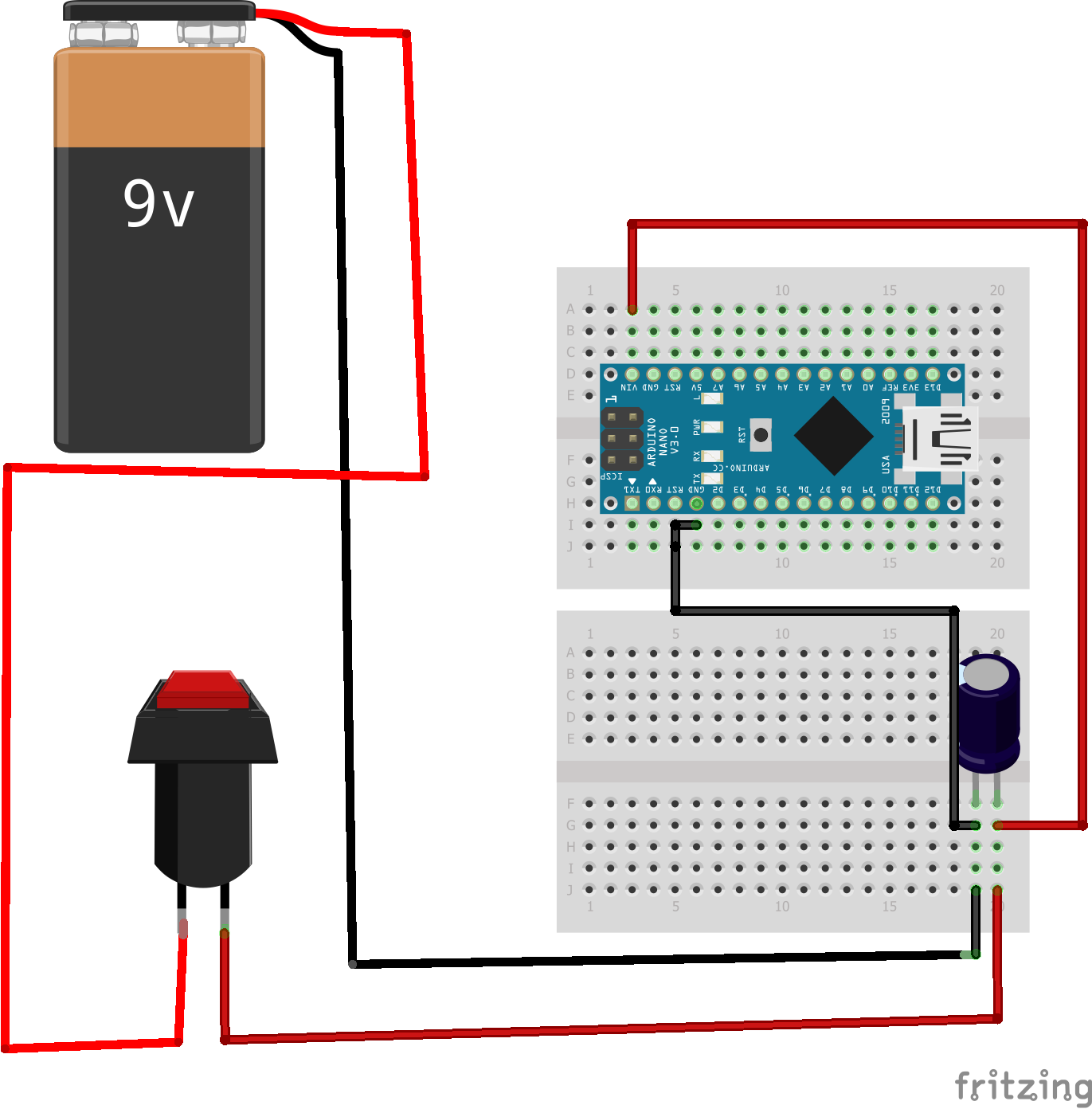
Es ist Zeit, die elektronische Schaltung zu erstellen! Für den Anfang verbinden Sie die Masse der 9V-Batterie mit der Arduino-Masse mit einem 100μF-Elektrolytkondensator dazwischen (denken Sie daran, dass die Seite des Kondensators mit der weißen Linie die Masse / Kathode ist). Verbinden Sie die 9V mit einem generischen Ein-Aus-Schalter und dann mit Vin an der Anode des Kondensators. Ich verwende zwei Mini-Steckbretter, weil sie gut in das Gehäuse passen. Verwenden Sie jedes beliebige Steckbrett, aber berücksichtigen Sie den begrenzten Platz.
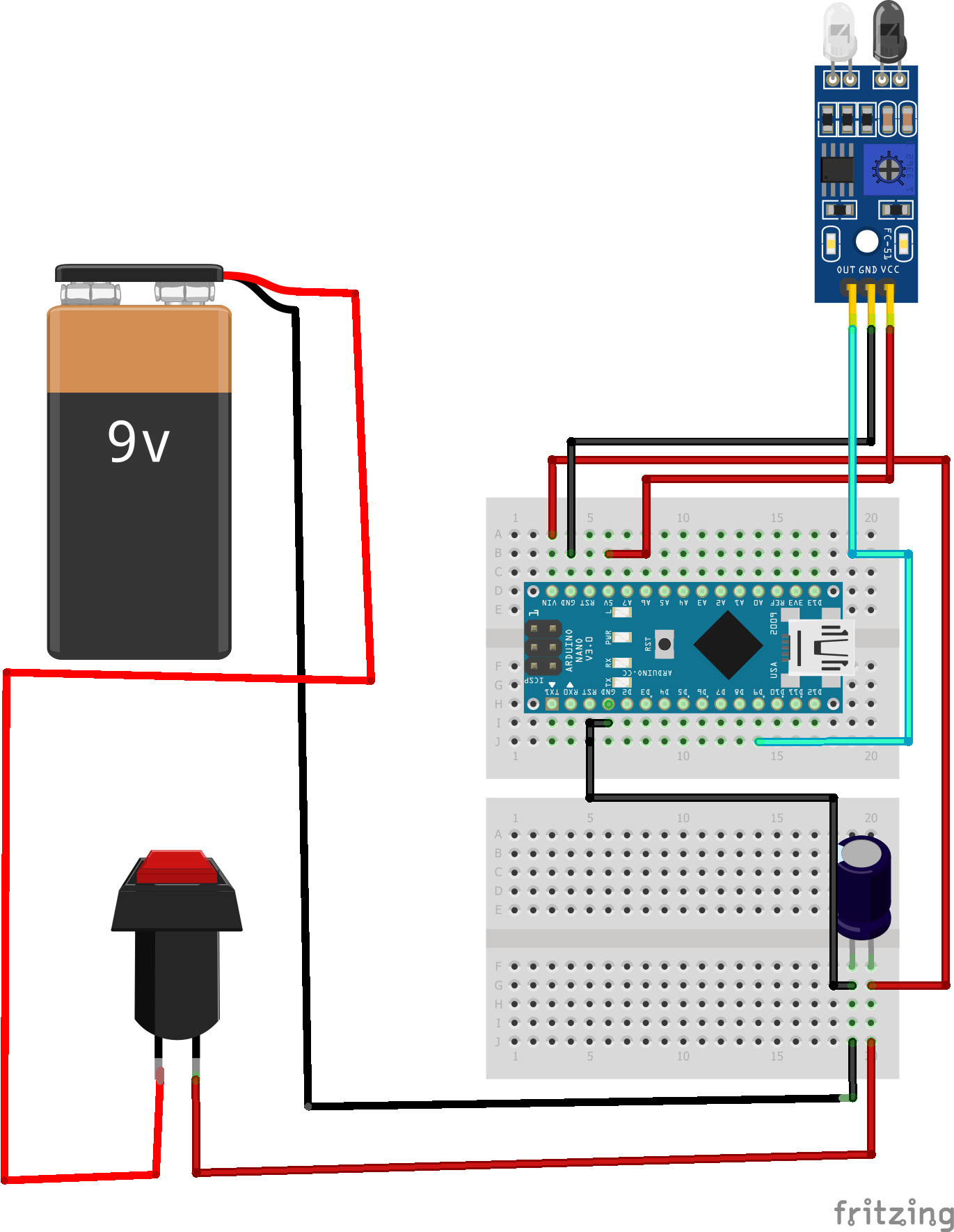
Verbinden Sie den IR-Hindernissensor VCC mit 5V, Masse mit Masse und schließlich OUT mit Digital Pin 9.

Jetzt werden wir den Endstoppschalter anschließen. Verbinden Sie das gemeinsame Bein mit 5V und das normalerweise offene mit Digital Pin 8 und Masse über einen 1kΩ Widerstand.
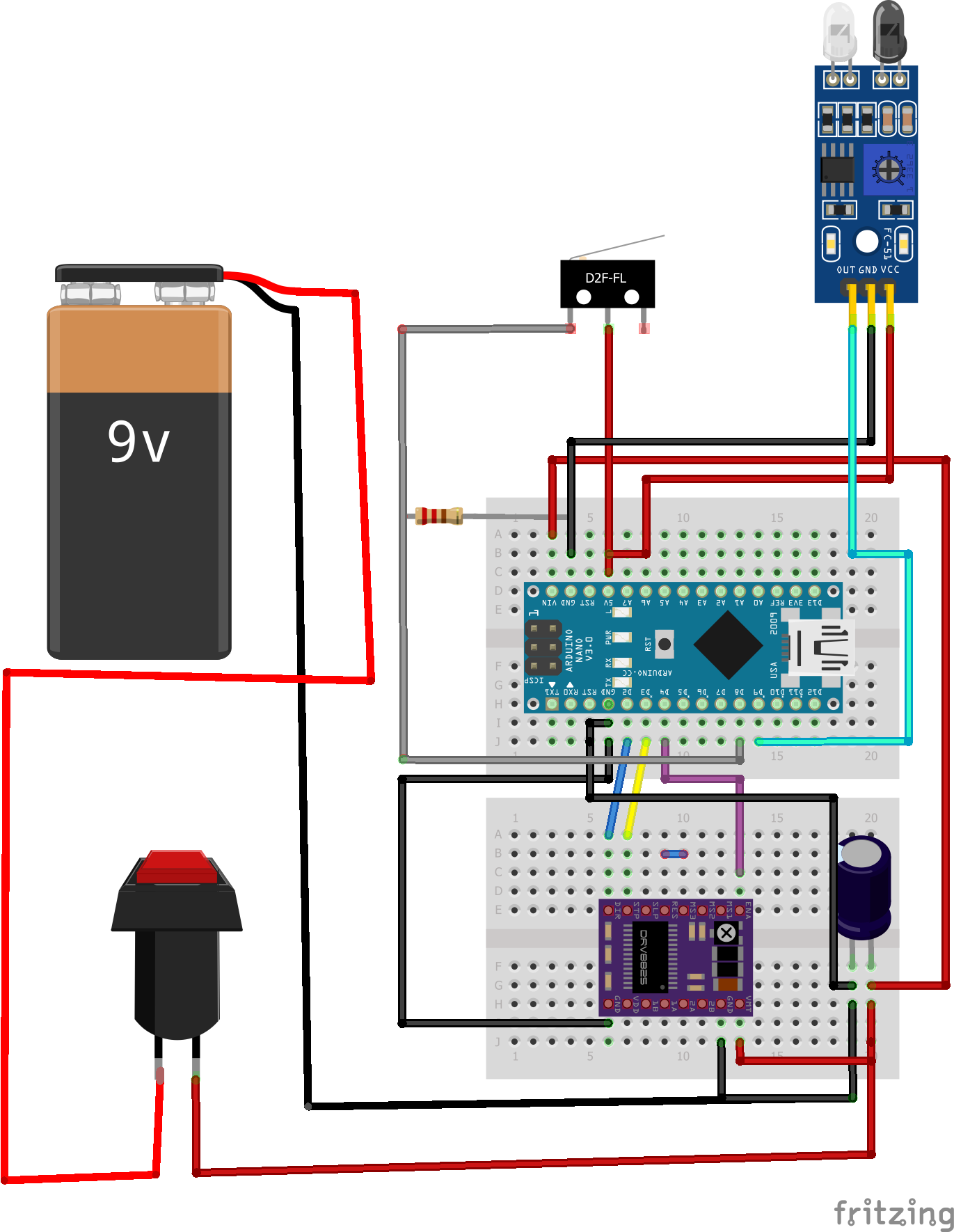
Fügen Sie dem Steckbrett den bipolaren Motortreiber DRV8825 hinzu. Verbinden Sie das Vmot mit dem Vin des Arduino. Verbinden Sie die beiden Masse mit Masse. Verbinden Sie den Dir-Pin mit Digital-Pin 2, den Step-Pin mit Digital-Pin 3, den Enable-Pin mit Digital-Pin 4. Verbinden Sie den Reset- und Sleep-Pin miteinander.
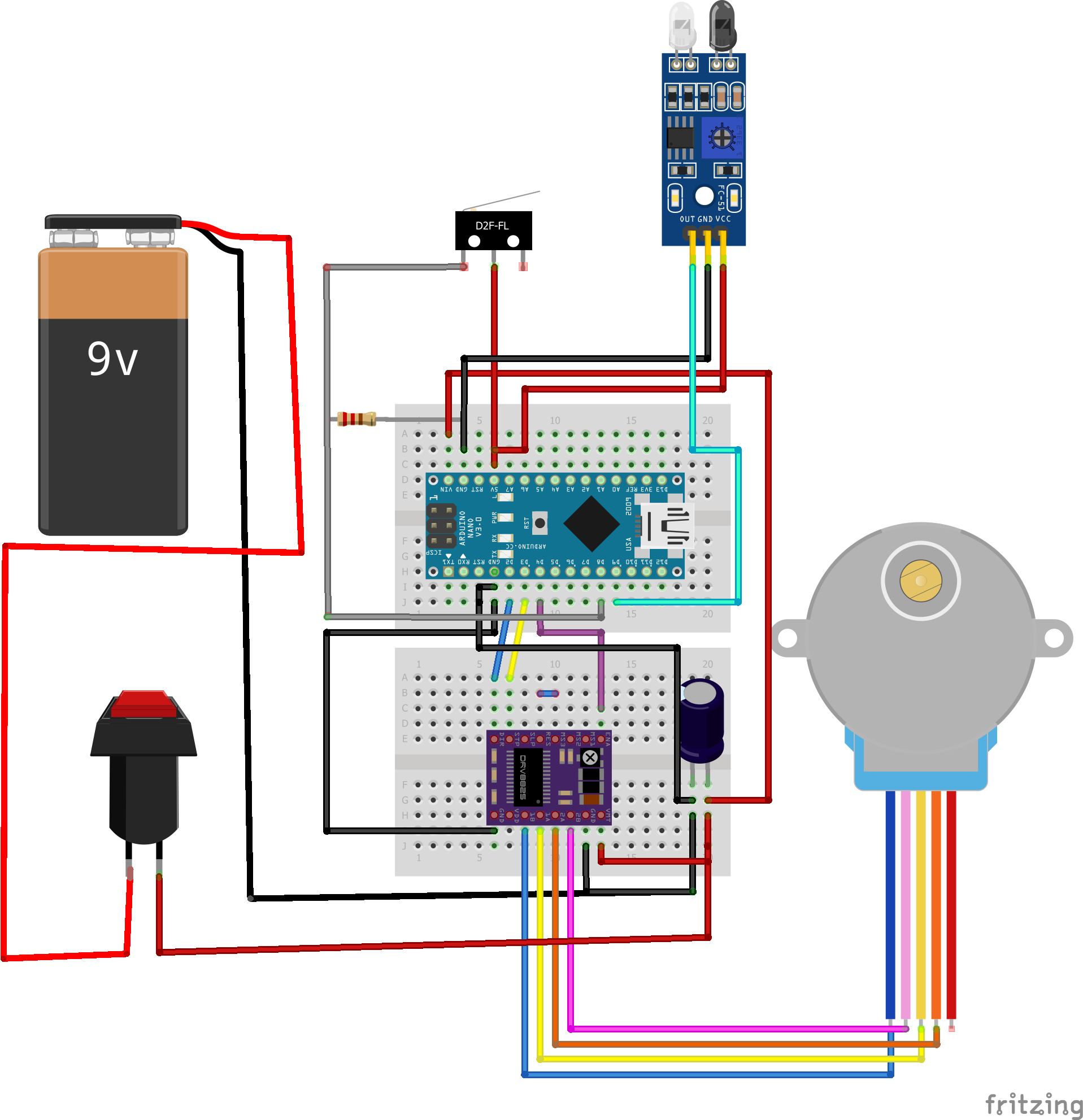
Schließen Sie zuletzt das blaue Kabel des 28BYJ-48 an A2, das gelbe Kabel an A1, das orange Kabel an B1 und das rosa Kabel an B2 an.
Endlich ist die Elektronik angeschlossen!
Schritt 9:Programmierung
const int dirPin =2; Wir definieren den Dir-Pin des Treibers als den Digital-Pin 2.
const int stepPin =3; Wir definieren den Step-Pin des Treibers als Digital-Pin 3.
const int enablePin =4; Wir definieren den Enable-Pin des Treibers als den Digital-Pin 4.
const int stepsPerRevolution =6000; Wir definieren die Anzahl der Schritte pro Umdrehung als 6000, eine 360-Grad-Drehung entspricht 2048 Schritten.
int endStop =8; Wir definieren den Eingangspin des EndStop Schalters als Digital Pin 8.
int irSensor =9; Wir definieren den Eingangspin des IR-Hindernissensors als den digitalen Pin 9.
void setup()
{
pinMode(endStop, INPUT);
pinMode(irSensor,INPUT); Im Setup deklarieren wir die endStop- und irSensor-Pins als Eingänge.
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
pinMode(enablePin, OUTPUT); Wir deklarieren stepPin, dirPin und enablePin als Outputs.
digitalWrite(enablePin, LOW); Wir setzen den enablePin LOW, um den DRV8825-Treiber zu aktivieren
während(digitalRead(endStop) ==LOW)
{ Solange der digitale Wert des EndStop-Schalters LOW ist (Der Schalter wird nicht gedrückt.)
digitalWrite(dirPin, HIGH); die Drehrichtung des Motors ist als Linkslauf eingestellt
for(int x =0; x <1; x++)
{
digitalWrite(stepPin, HIGH);
delayMicroseconds(2000);
digitalWrite( stepPin, LOW);
delayMicroseconds(2000);
} und der Stepper dreht sich Schritt für Schritt gegen den Uhrzeigersinn, bis die Bedingung der While-Anweisung falsch ist.
digitalWrite(enablePin, HIGH);
} Dadurch wird unser Treiber deaktiviert, sodass der Treiber bei Nichtverwendung nicht viel Strom verbraucht.
void loop()
{
if(digitalRead(irSensor)==0)
{ In der Schleife, wenn der Digitalwert des irSensor 0 ist (es befindet sich ein Hindernis (Hand) vor dem IR-Hindernissensor)
digitalWrite(enablePin, LOW); Der Treiber wird aktiviert.
digitalWrite(dirPin, LOW); Die Drehrichtung des Motors ist im Uhrzeigersinn eingestellt.
for(int x =0; x
digitalWrite(stepPin, HIGH);
delayMicroseconds(2000);
digitalWrite( stepPin, LOW);
delayMicroseconds(2000);
} Der Stepper dreht sich 6000 Schritte im Uhrzeigersinn.
Verzögerung(2000); Es wird 2 Sekunden warten.
während(digitalRead(endStop) ==LOW)
{ Solange der digitale Wert des EndStop-Schalters LOW ist (Der Schalter wird nicht gedrückt.
digitalWrite(dirPin, HIGH); die Drehrichtung des Motors ist als Linkslauf eingestellt.
for(int x =0; x <1; x++)
{
digitalWrite(stepPin, HIGH);
delayMicroseconds(2000);
digitalWrite( stepPin, LOW);
delayMicroseconds(2000);
}
} und der Stepper dreht sich Schritt für Schritt gegen den Uhrzeigersinn, bis die Bedingung der While-Anweisung falsch ist.
digitalWrite(enablePin, HIGH);
}
} Dann wird der Treiber deaktiviert, bis die Bedingung der If-Anweisung wahr ist und der Code erneut abgespielt wird.
Schritt 10:Montage
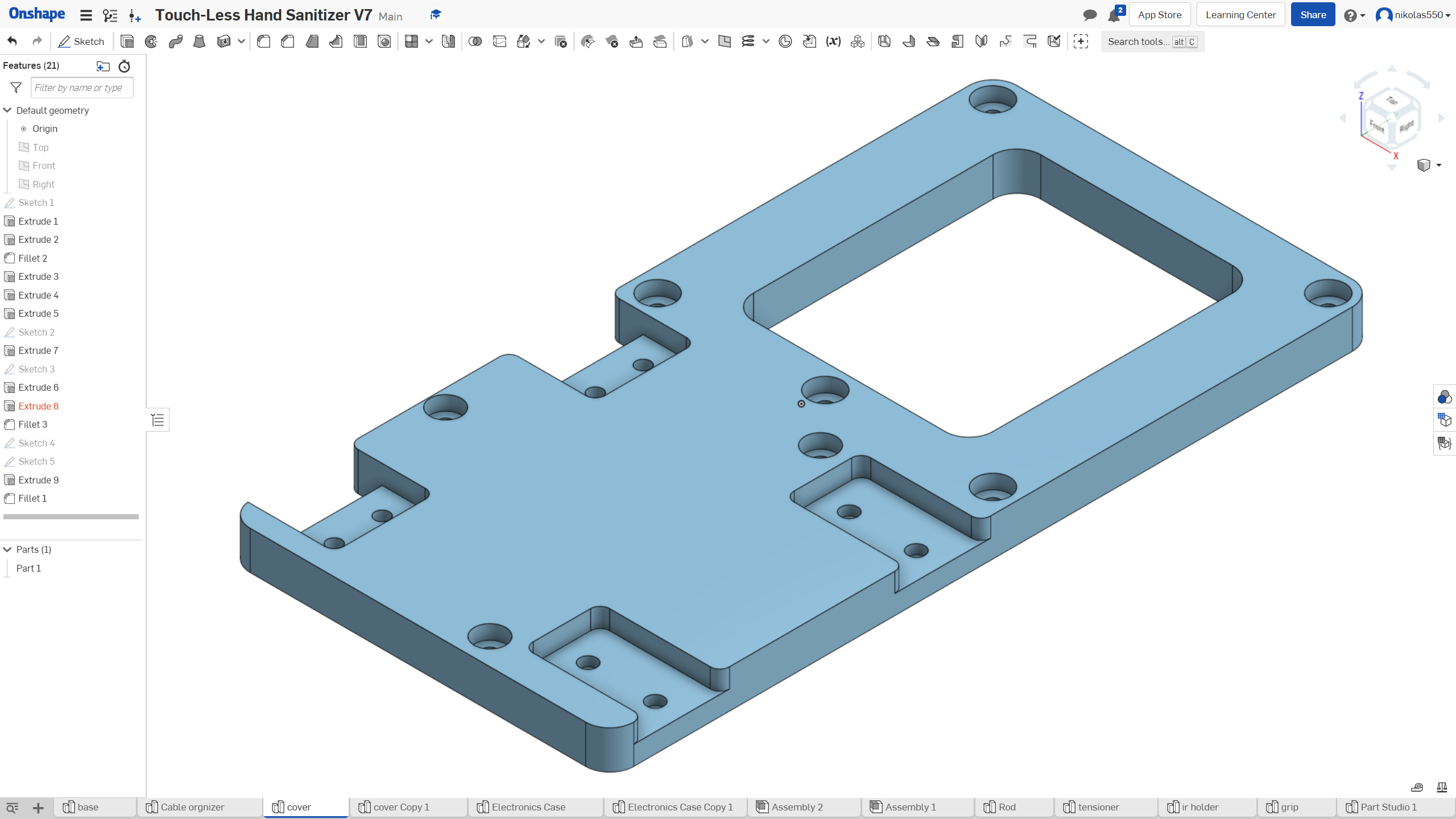
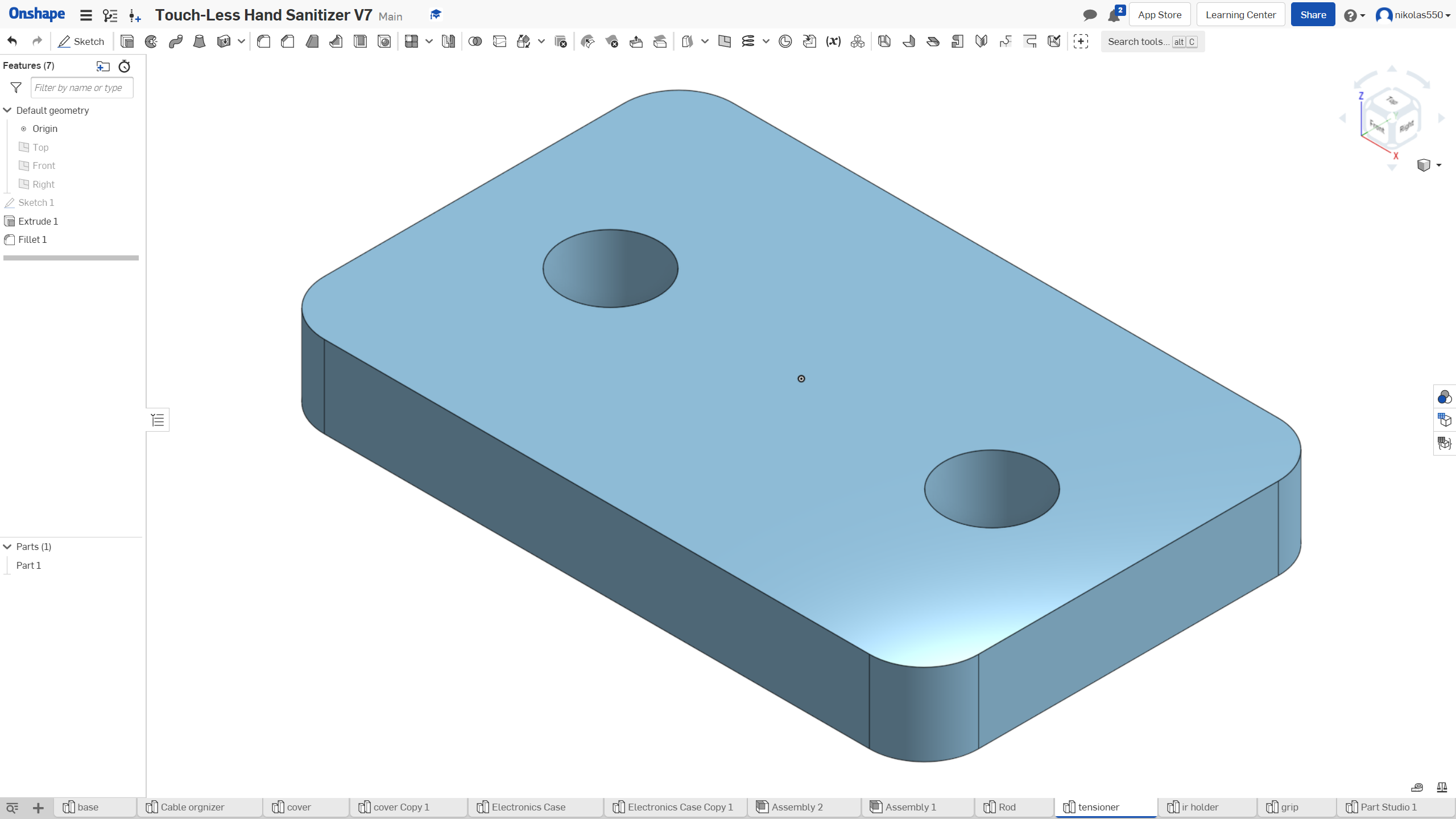
Abdeckungsmontage


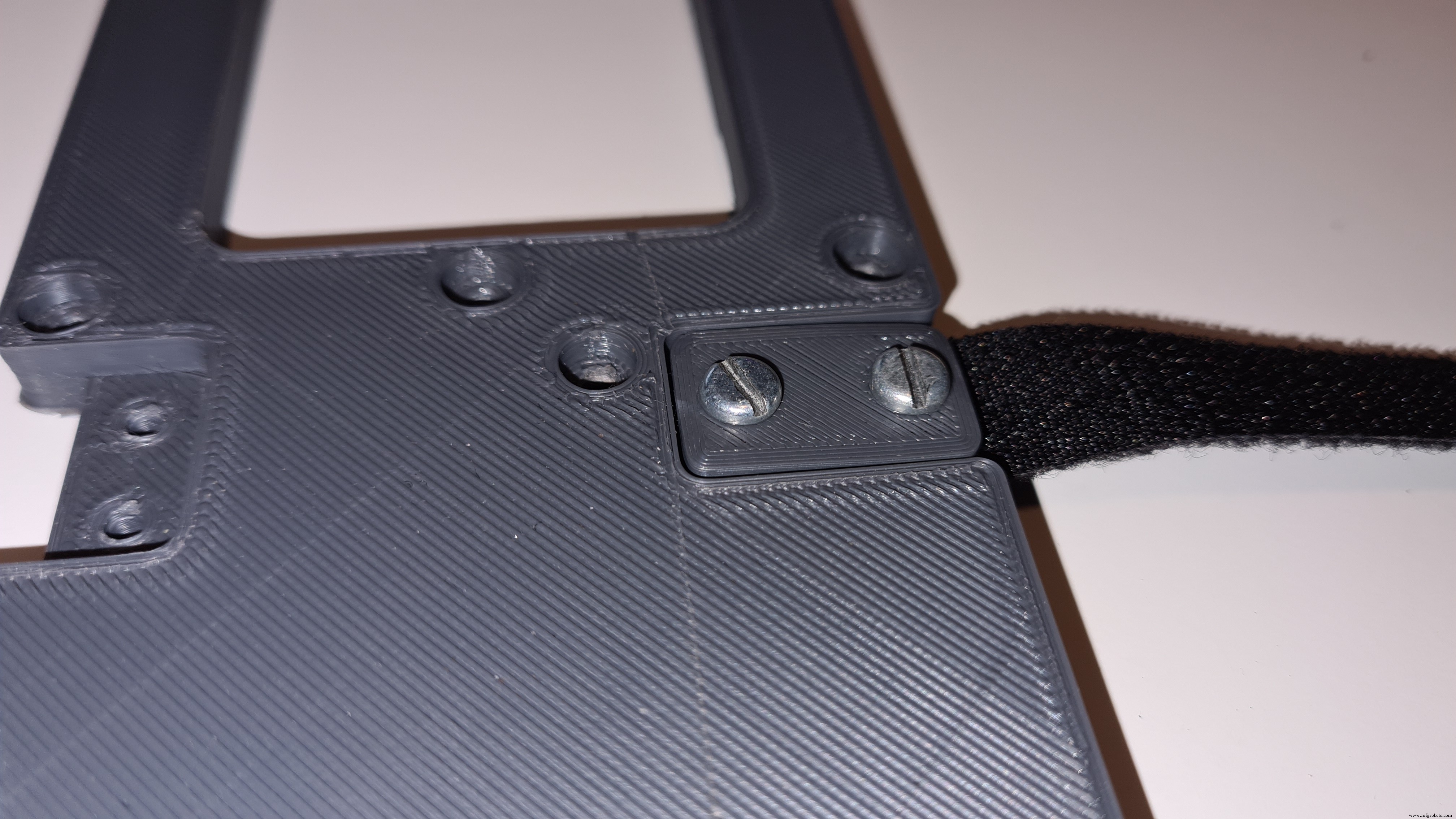

Legen Sie einfach den Klettverschluss in die Lücke, fügen Sie den Halter darüber und schrauben Sie sie zusammen.
x2


Schrauben Sie den Klettverschluss an die Abdeckung. Die Deckelmontage ist nun abgeschlossen!
x2
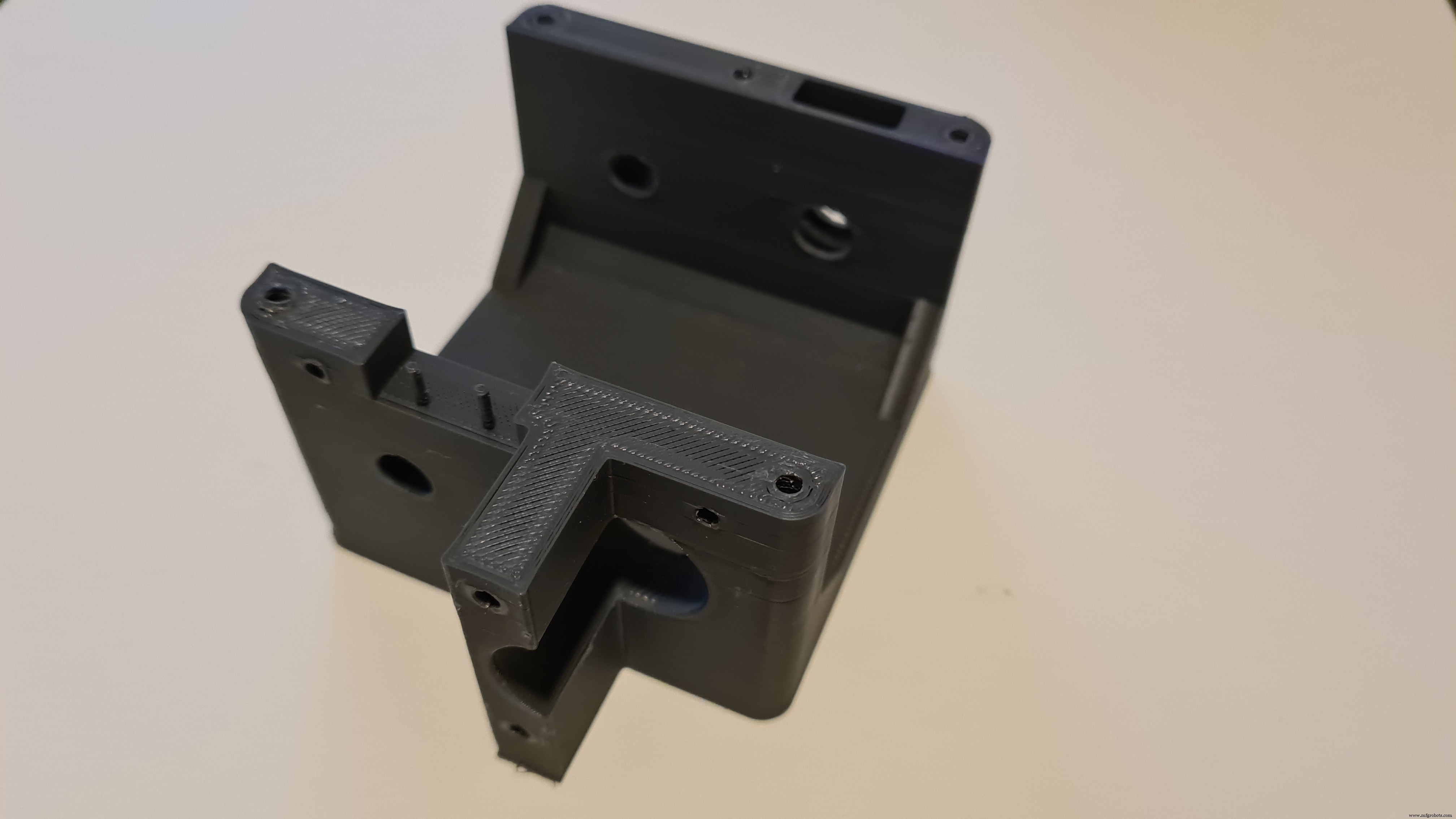
Näheinheit

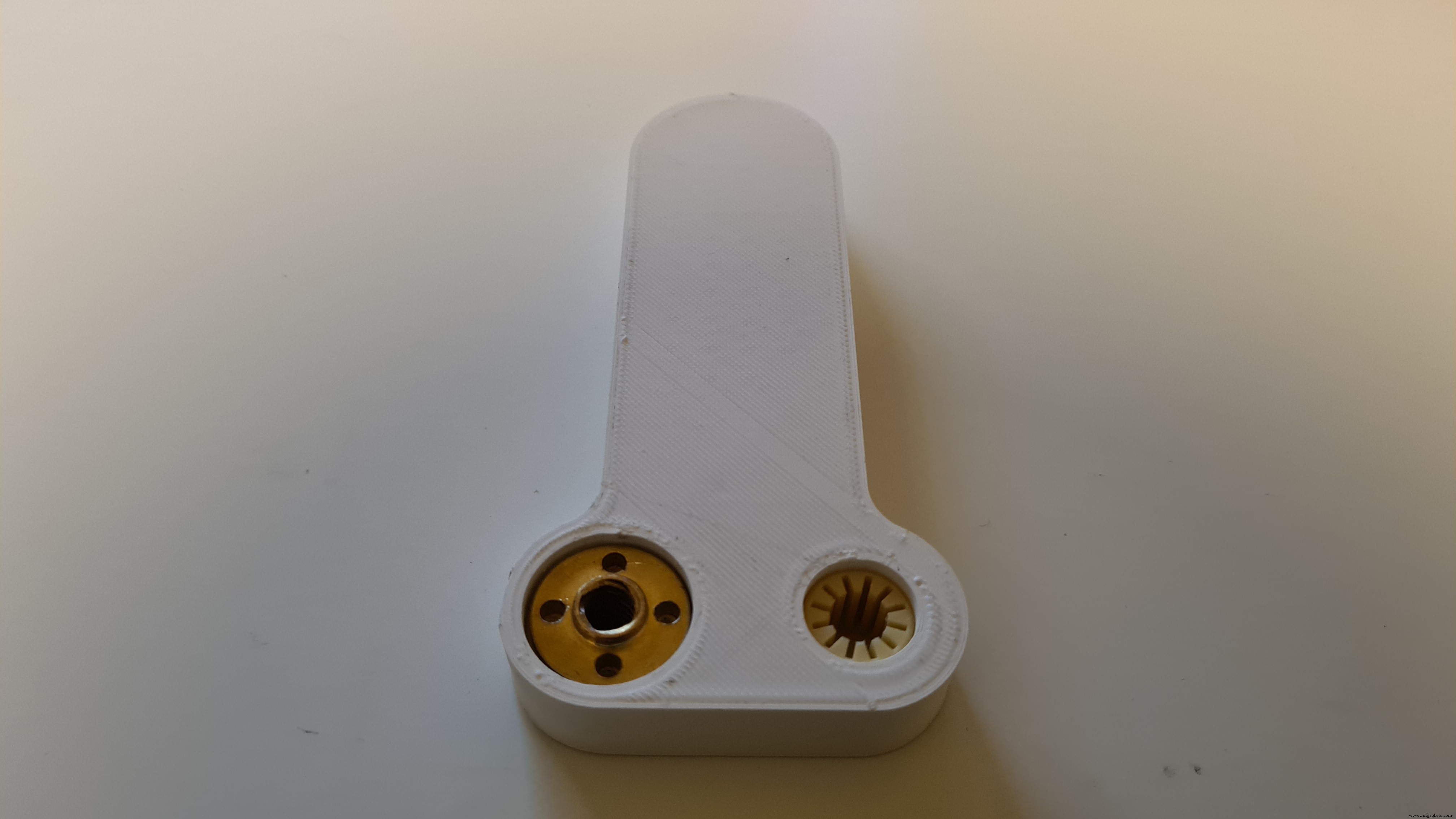

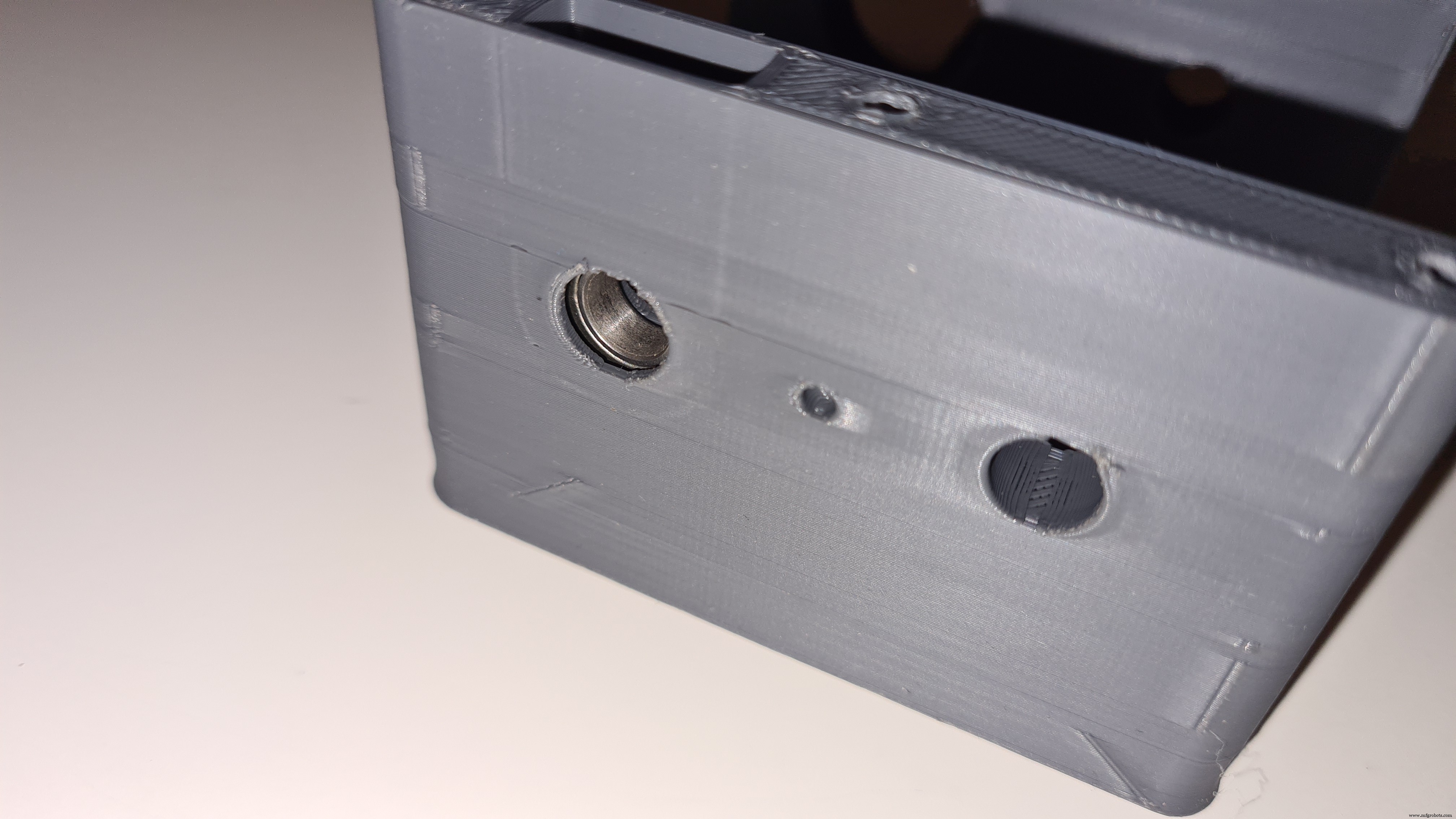
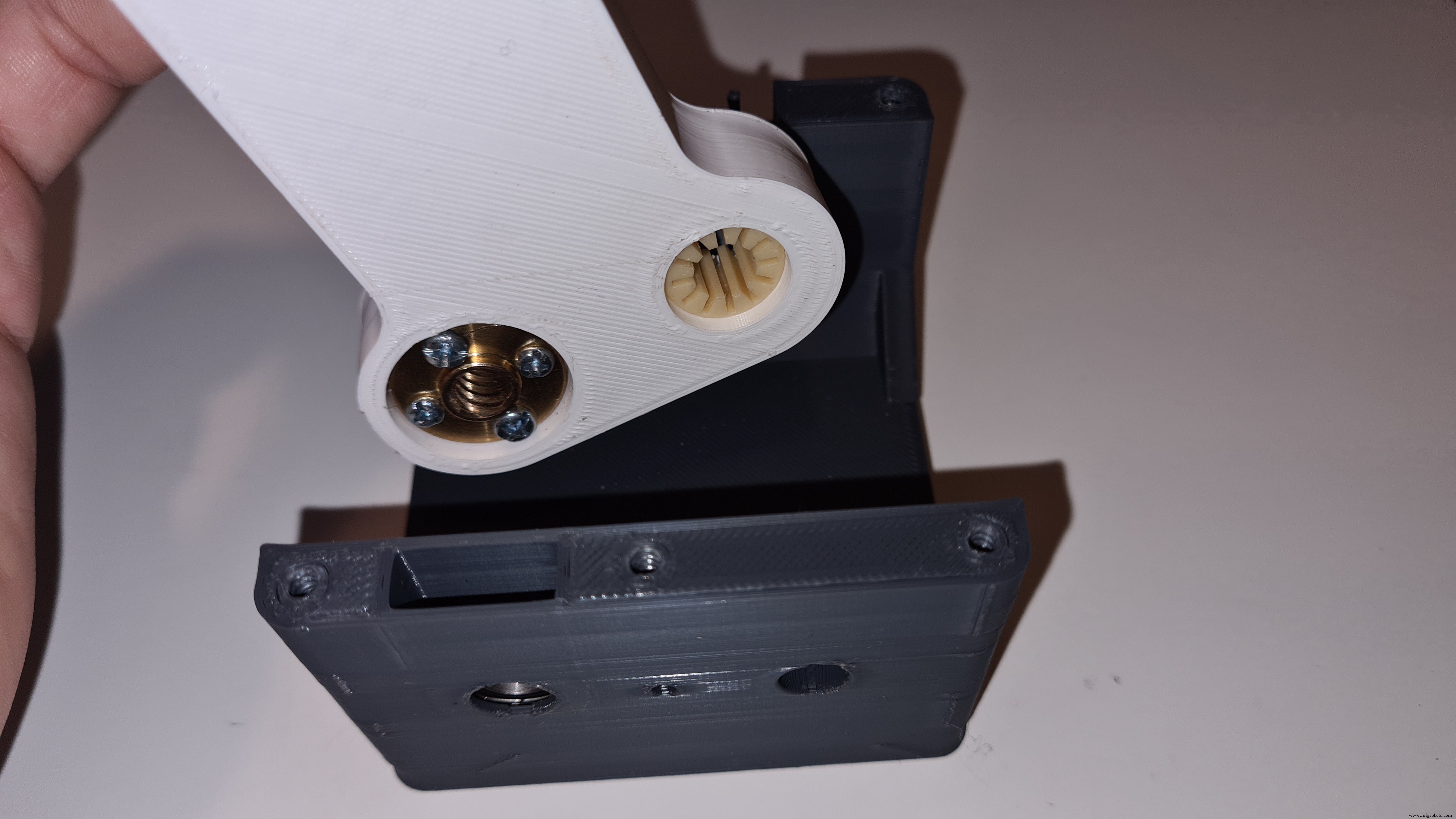
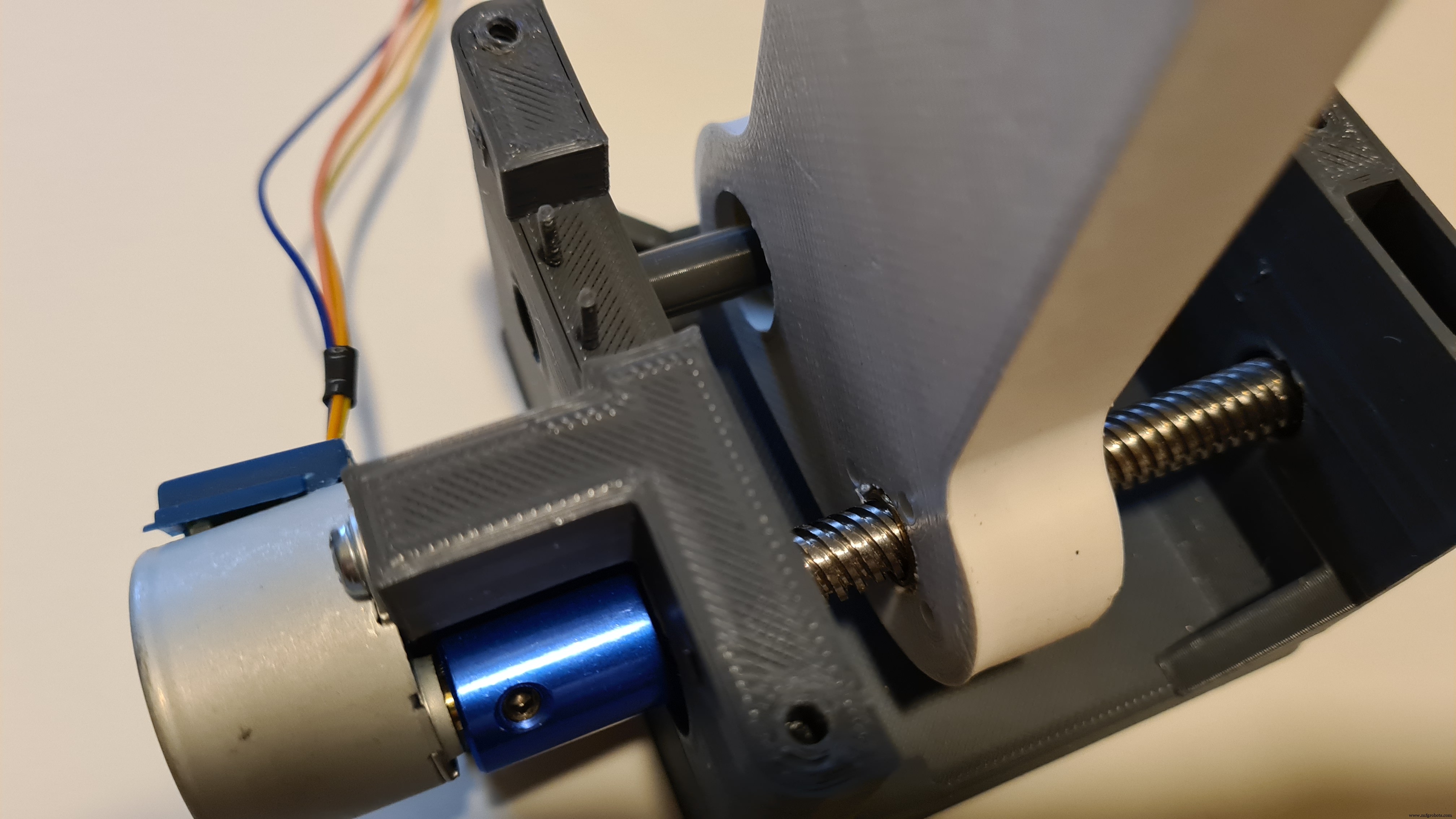
Schieben Sie das Linearlager in das rechte Loch, bis es in der Mitte ist. Schrauben Sie die T8-Mutter mit 4 Schrauben in das linke Loch des Nähfußes.
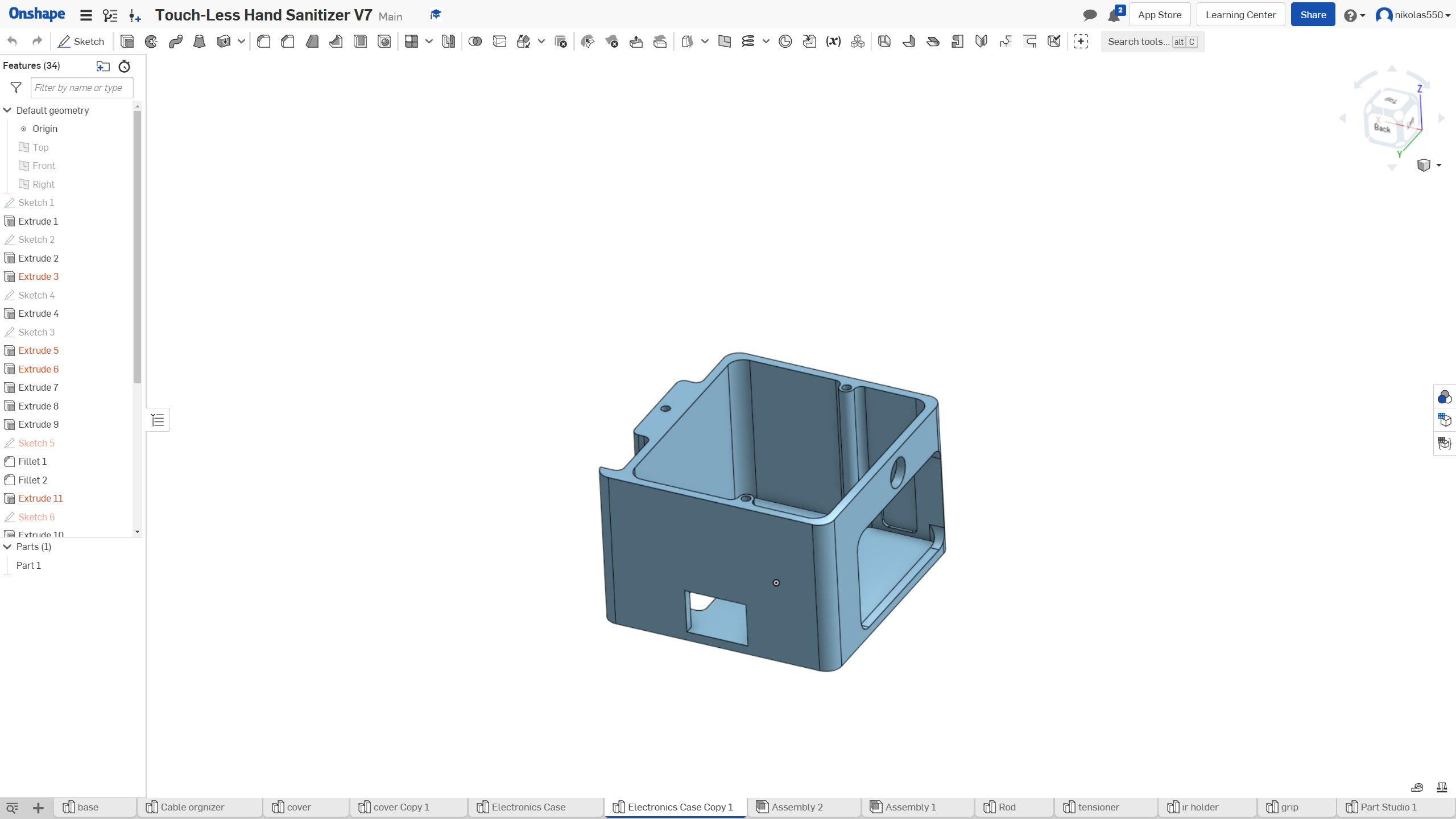
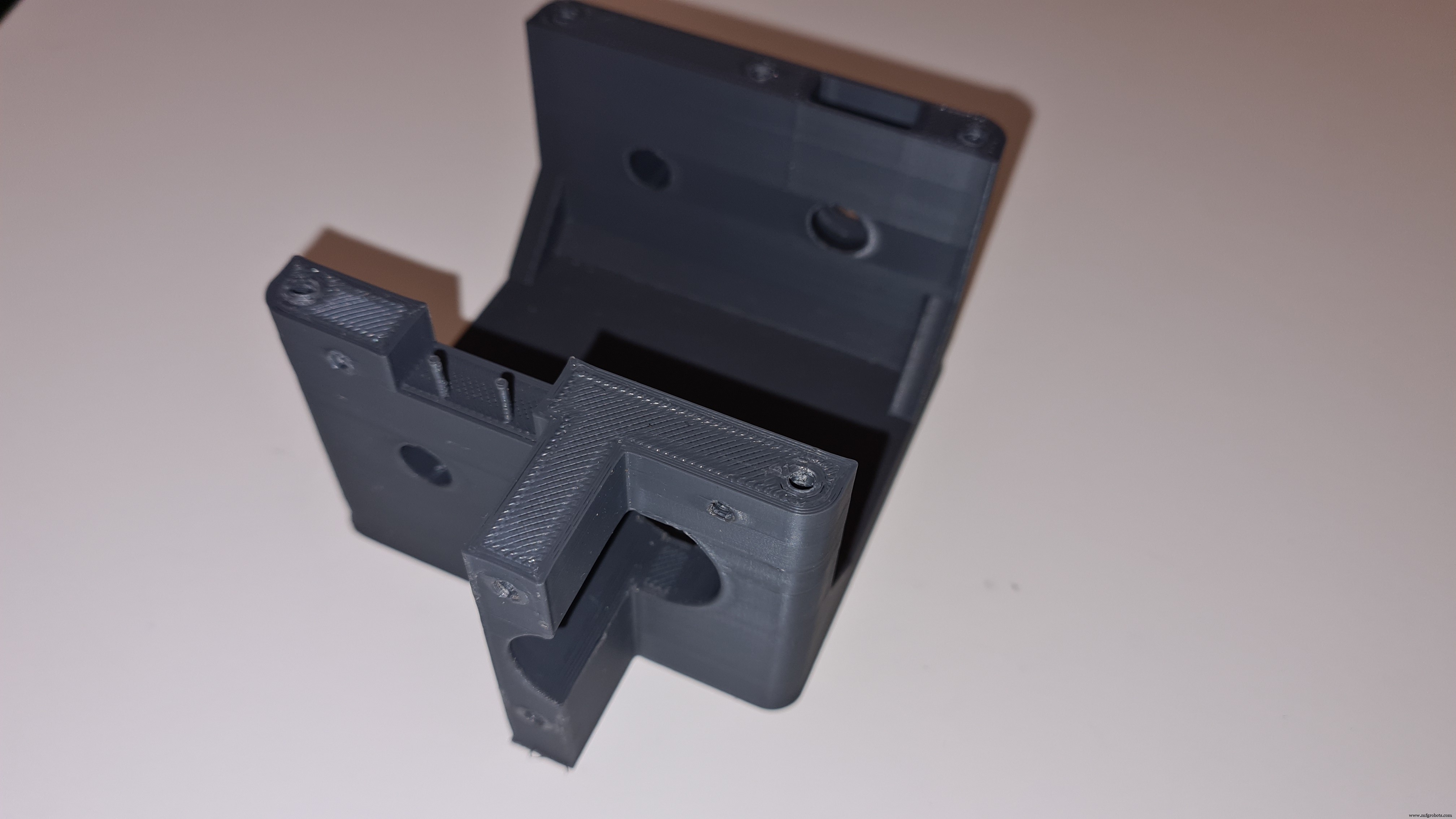
Montage des Elektronikgehäuses
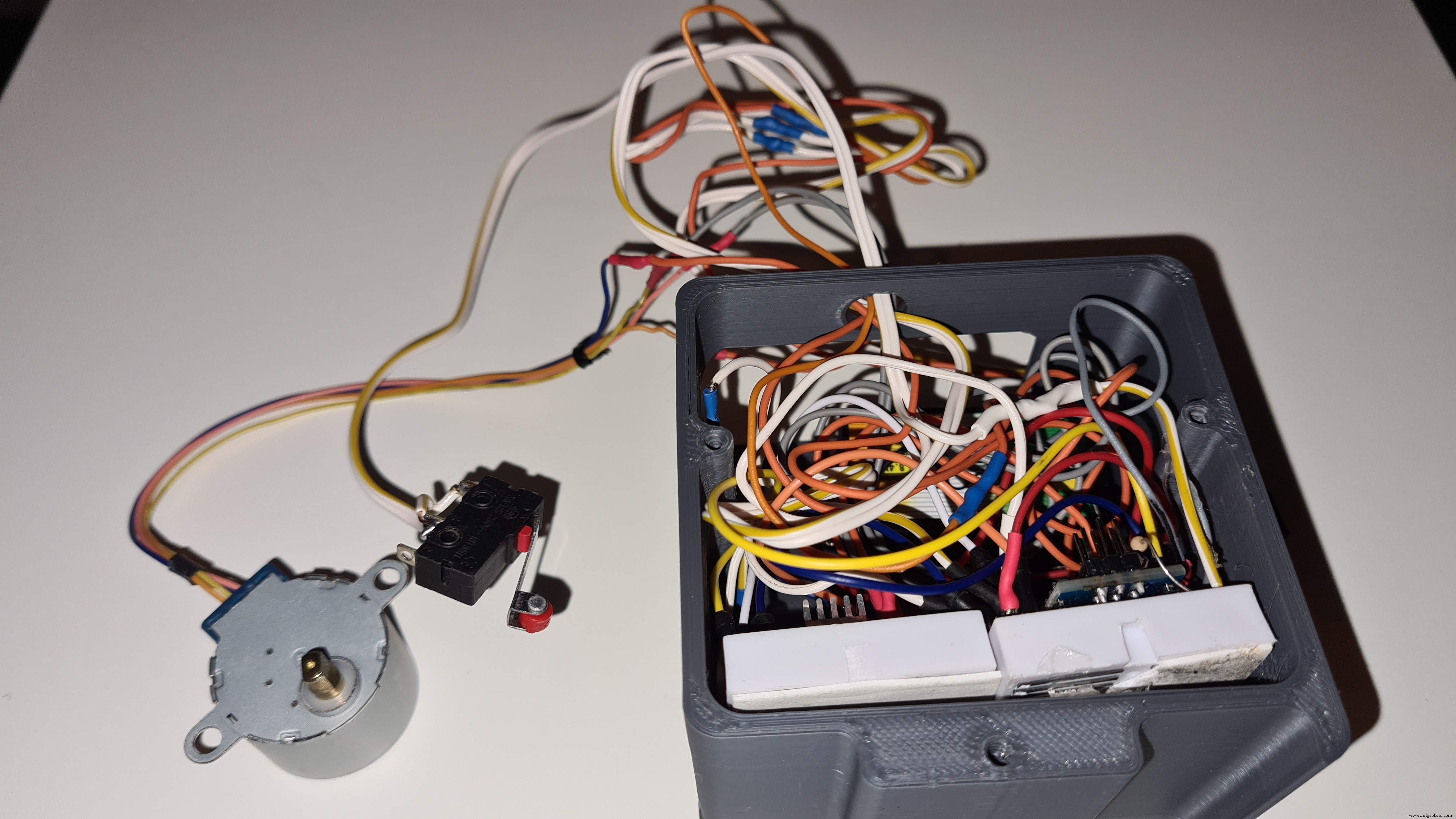
Legen Sie Ihre Schaltung in das Elektronikgehäuse. Führen Sie die Kabel des Steppers, des Schalters und des IR-Hindernissensors durch das Loch.
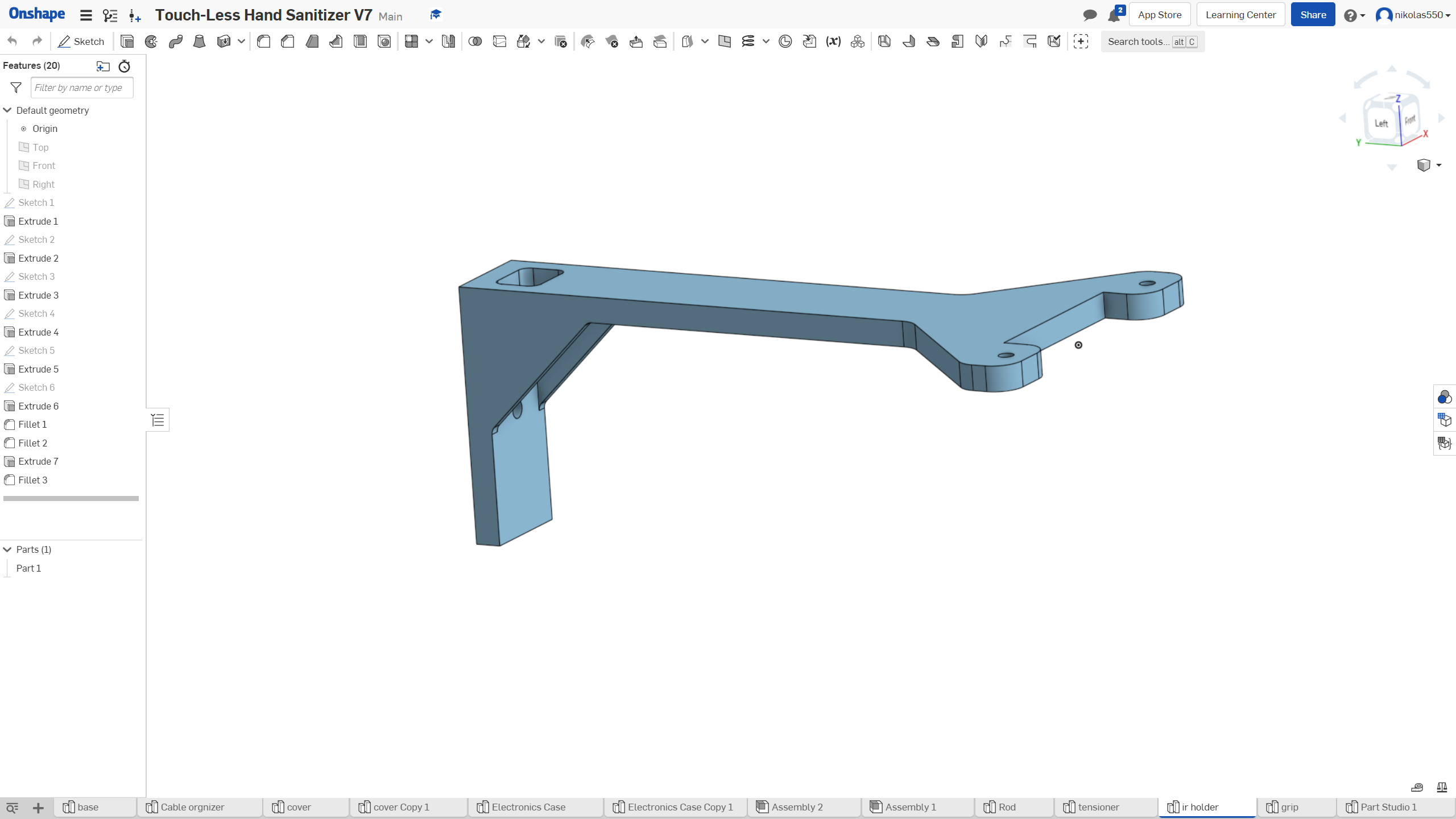
Halterung für IR-Hindernissensor
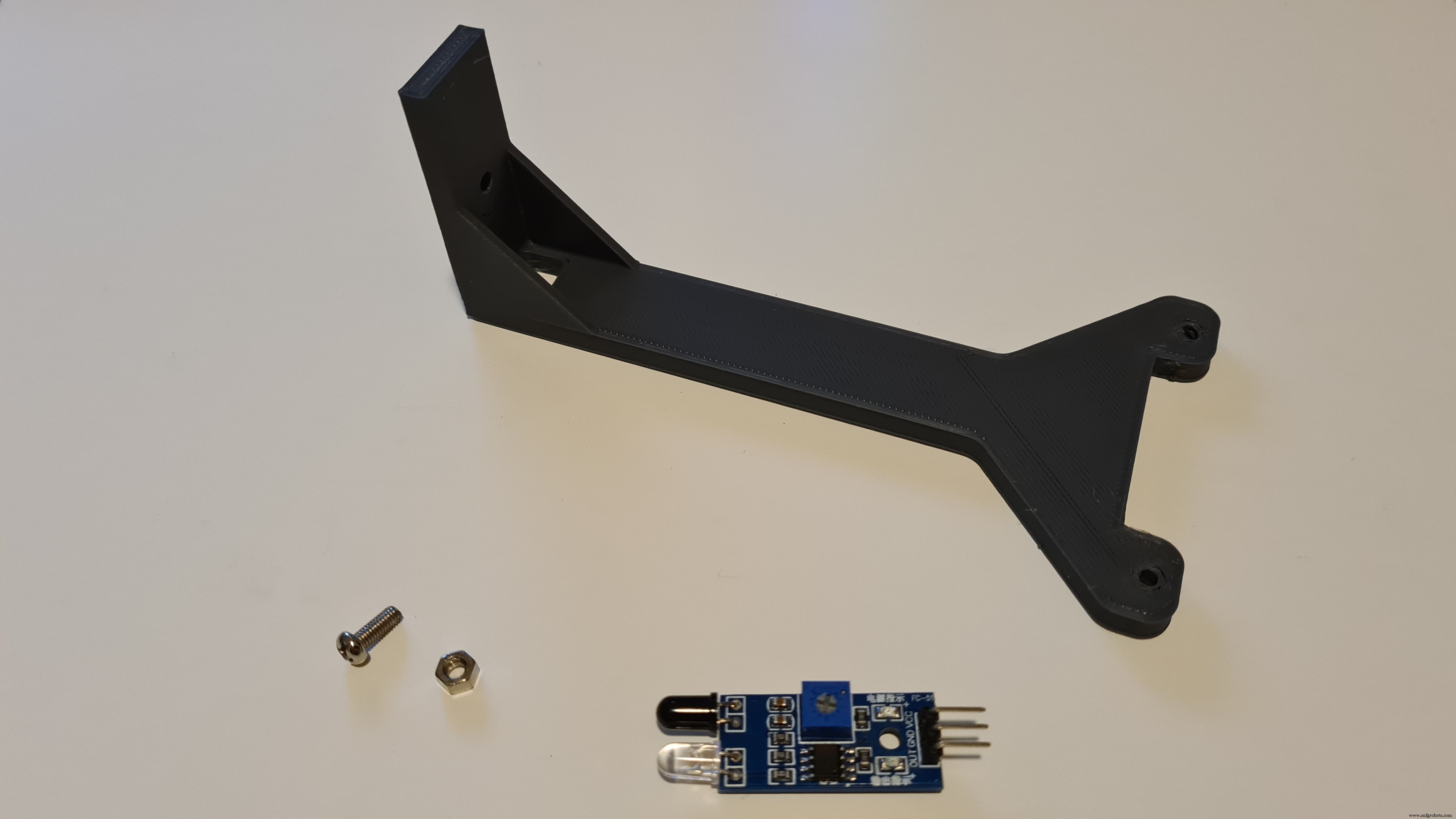
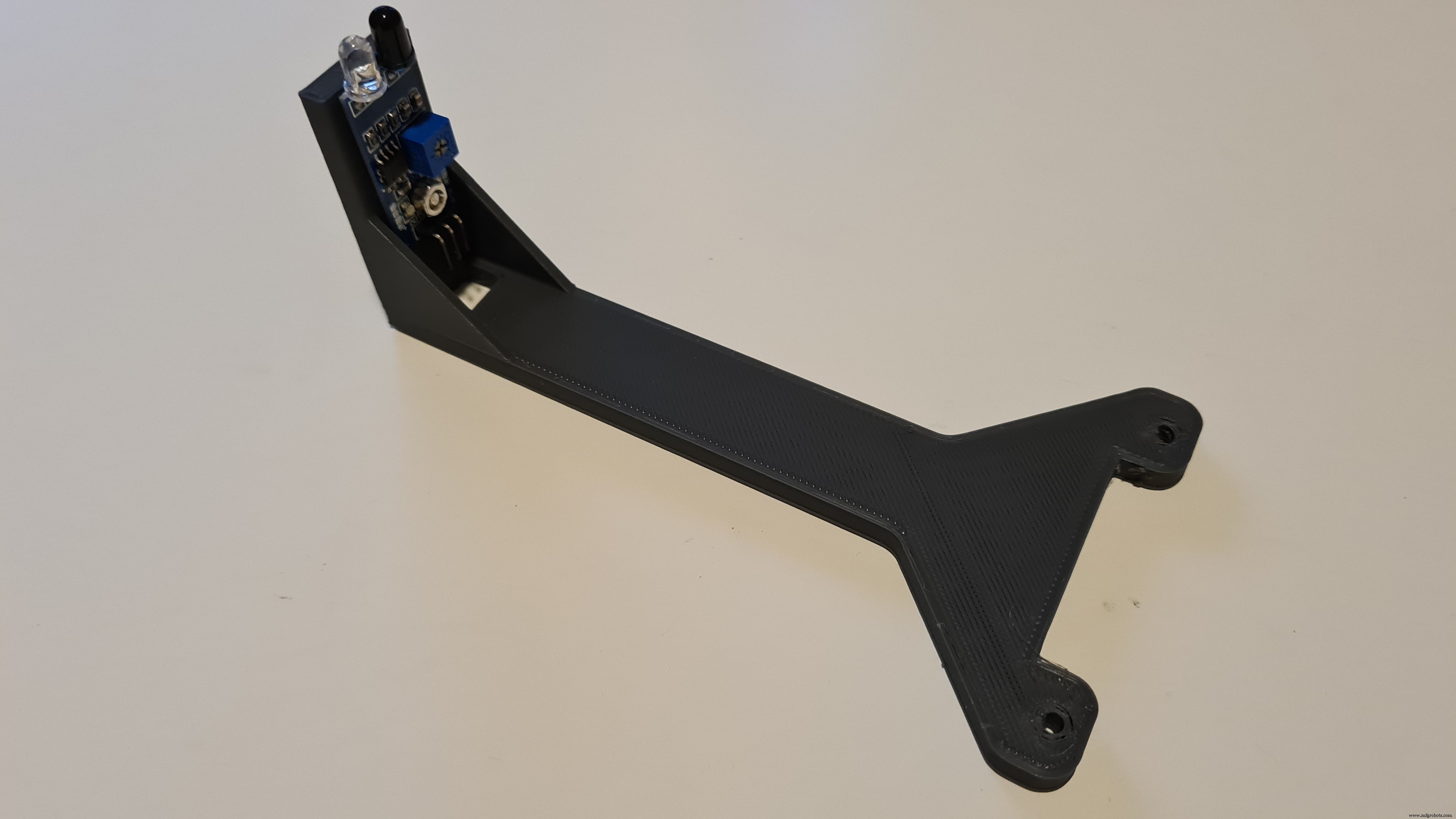
Schrauben Sie den IR-Hindernissensor in das Loch und verwenden Sie eine Mutter, um die Passform festzuziehen und die Position anzupassen.
Endmontage!
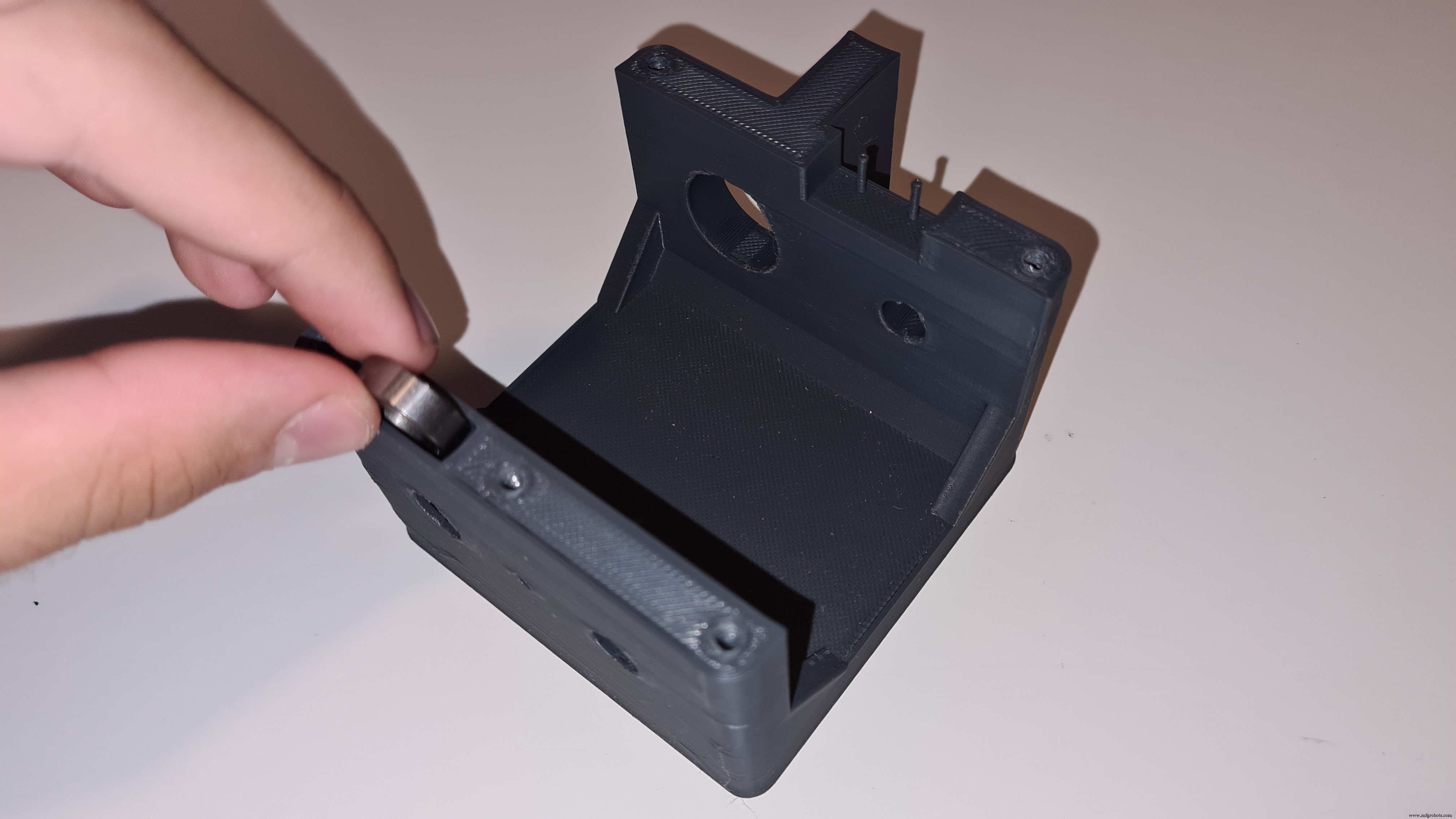
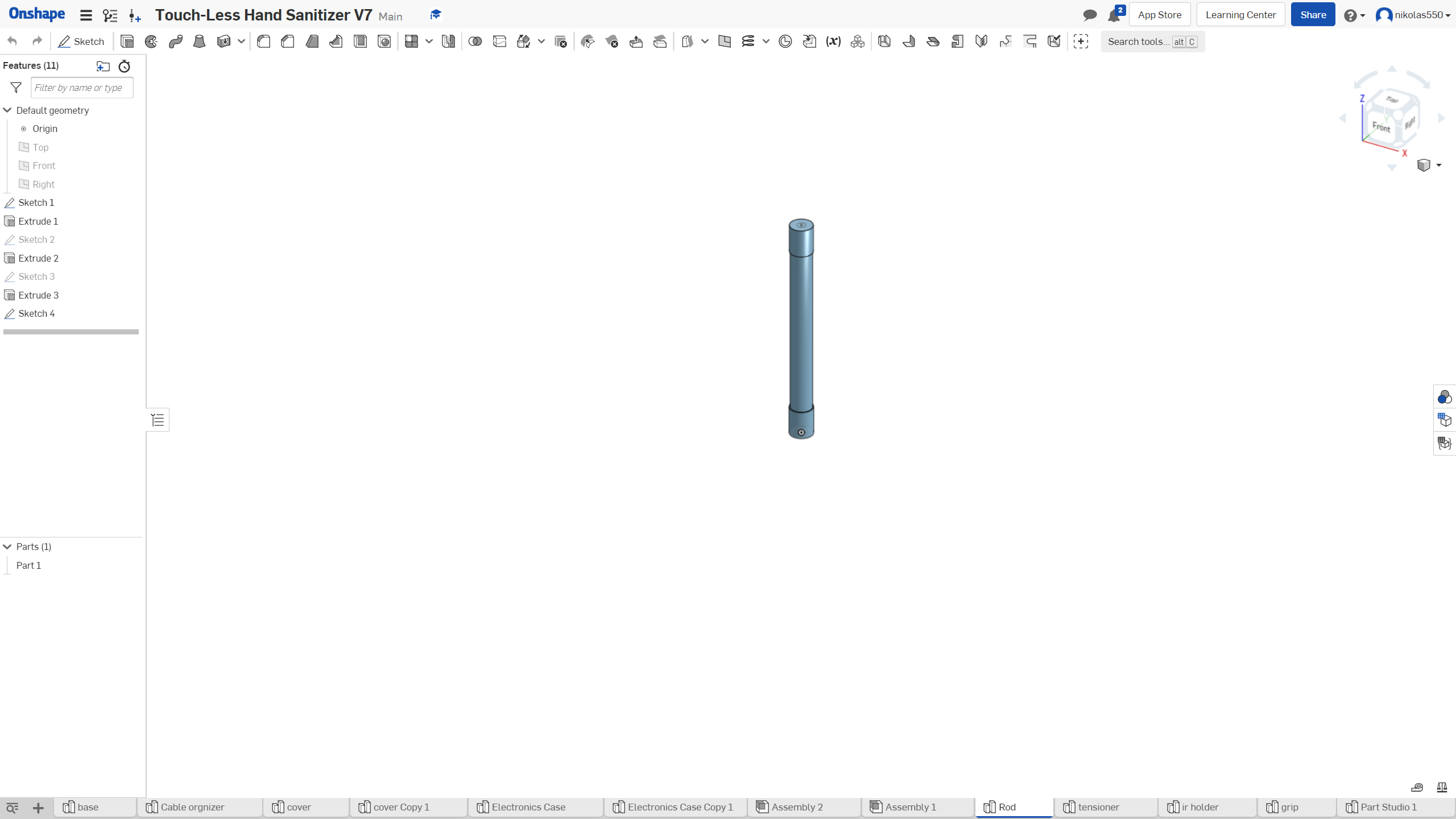
Setzen Sie das Lager ein.

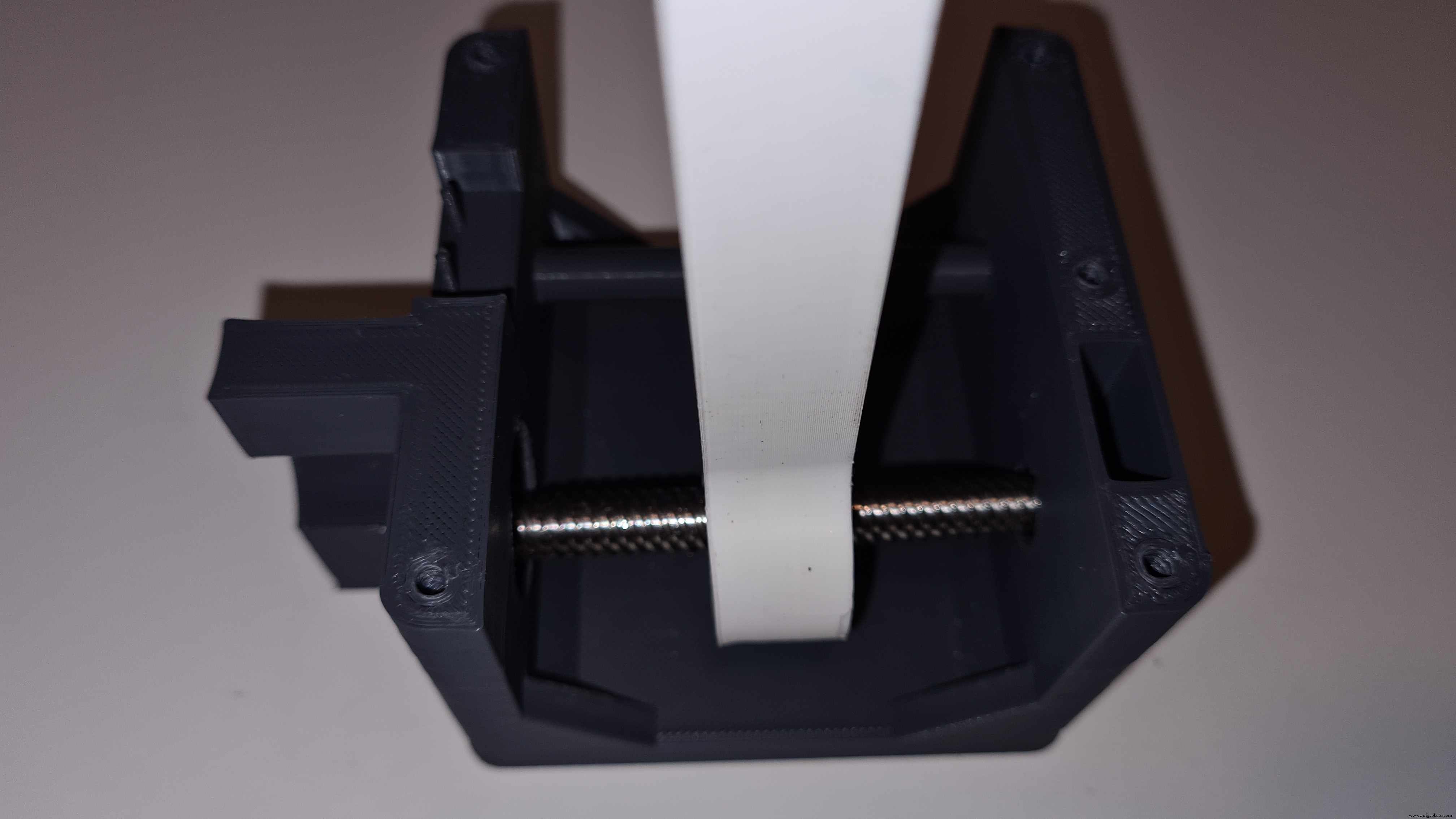
Fügen Sie die T8-Schraube und die Presser-Baugruppe hinzu. (Die T8-Schraube muss 70 mm bis 82 mm lang sein . Wenn Sie eine längere Schraube haben, sollten Sie diese mit einem Werkzeug wie einer Bügelsäge auf die gewünschte Größe zuschneiden. Andernfalls können Sie es mit 3D-Druck versuchen.)

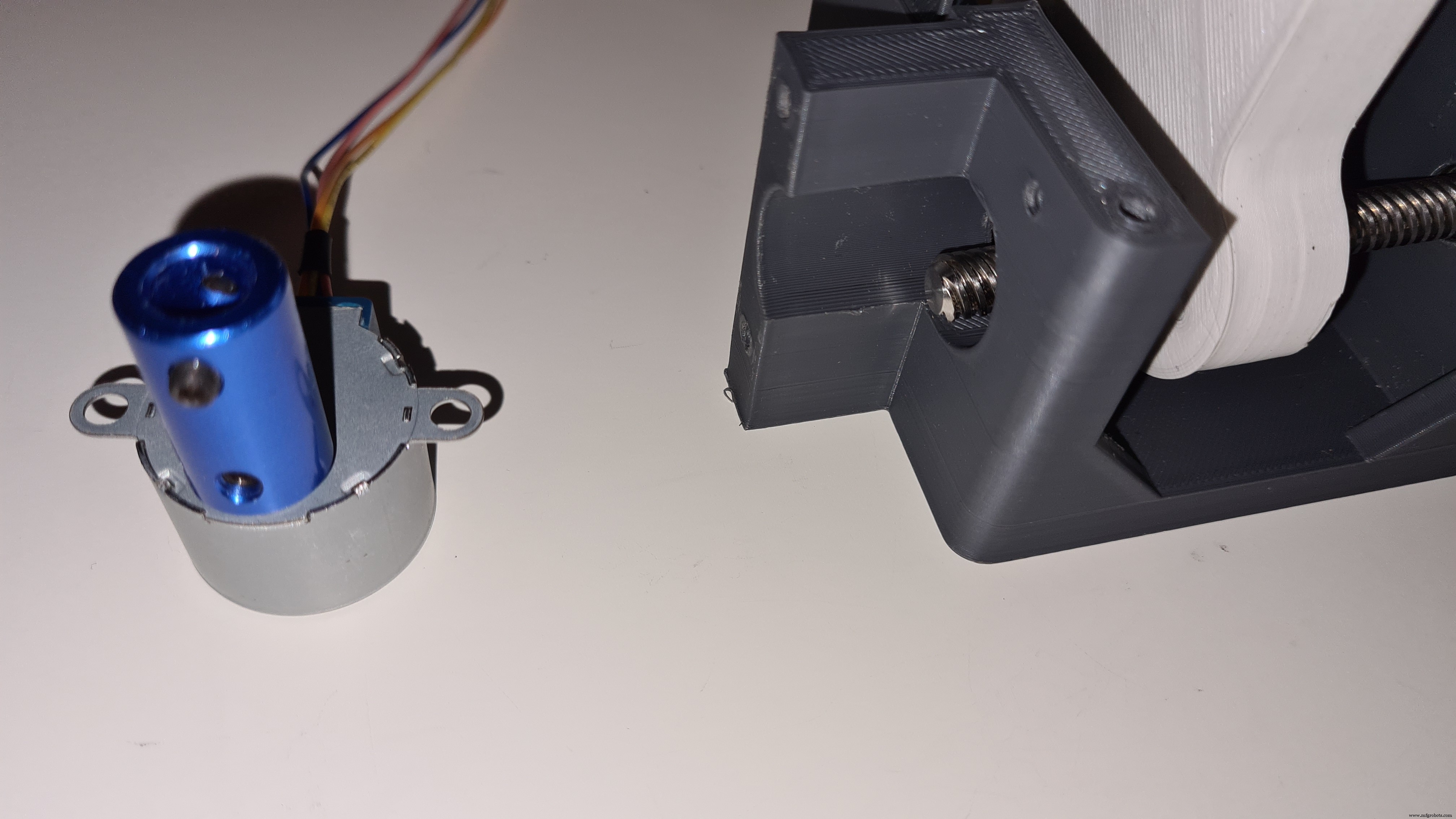
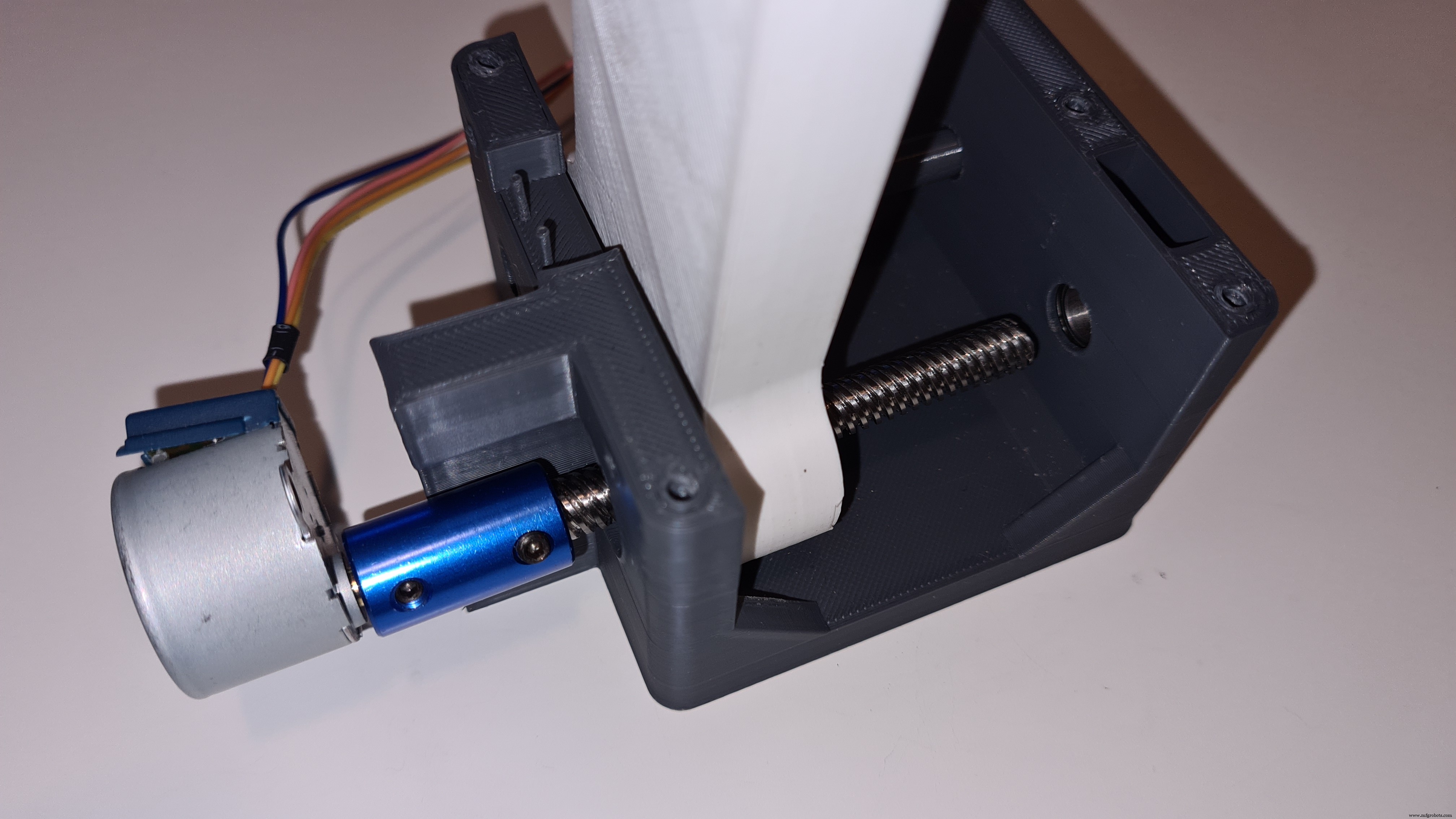
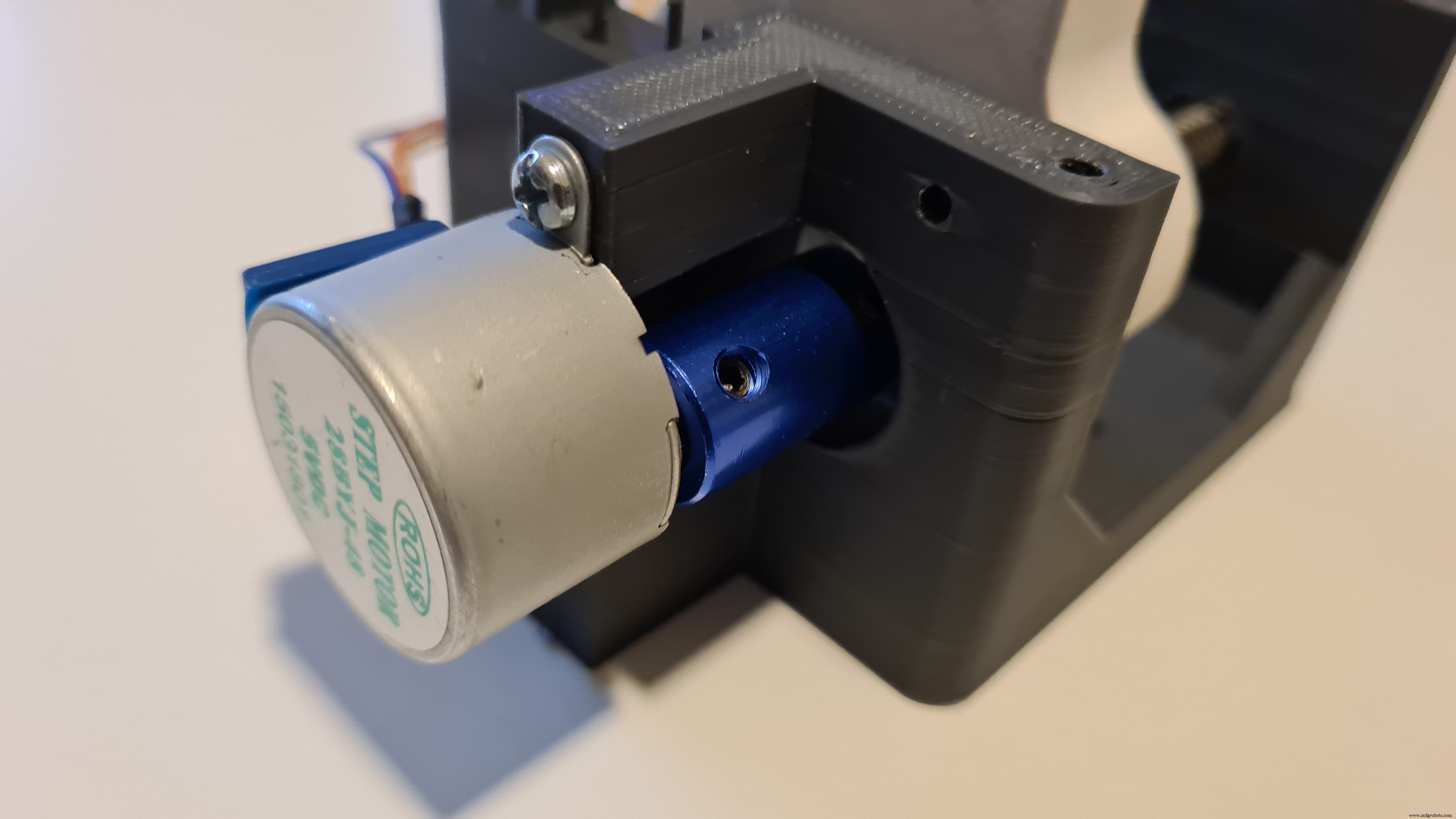
Ziehen Sie die Kupplung an der Motorwelle fest. Dann an der T8-Schraube festziehen. Schrauben Sie den Motor zuletzt mit zwei Schrauben an die Basis.
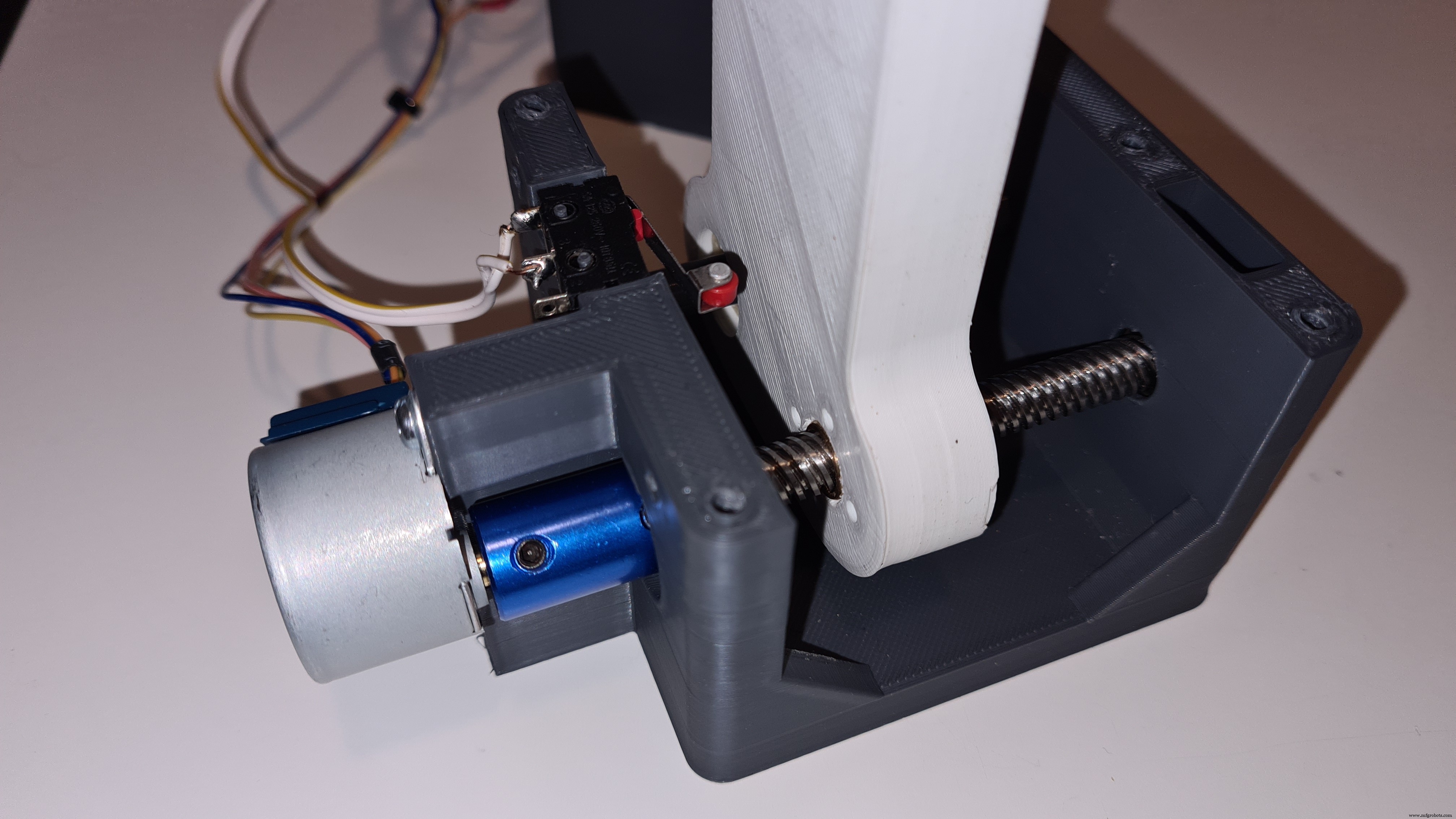
Fügen Sie den Endstoppschalter hinzu.
Schrauben Sie die Abdeckung mit 5 Schrauben an die Basis.


Schrauben Sie den IR-Hindernissensorhalter mit 2 Schrauben an der Vorderseite der Basis fest.
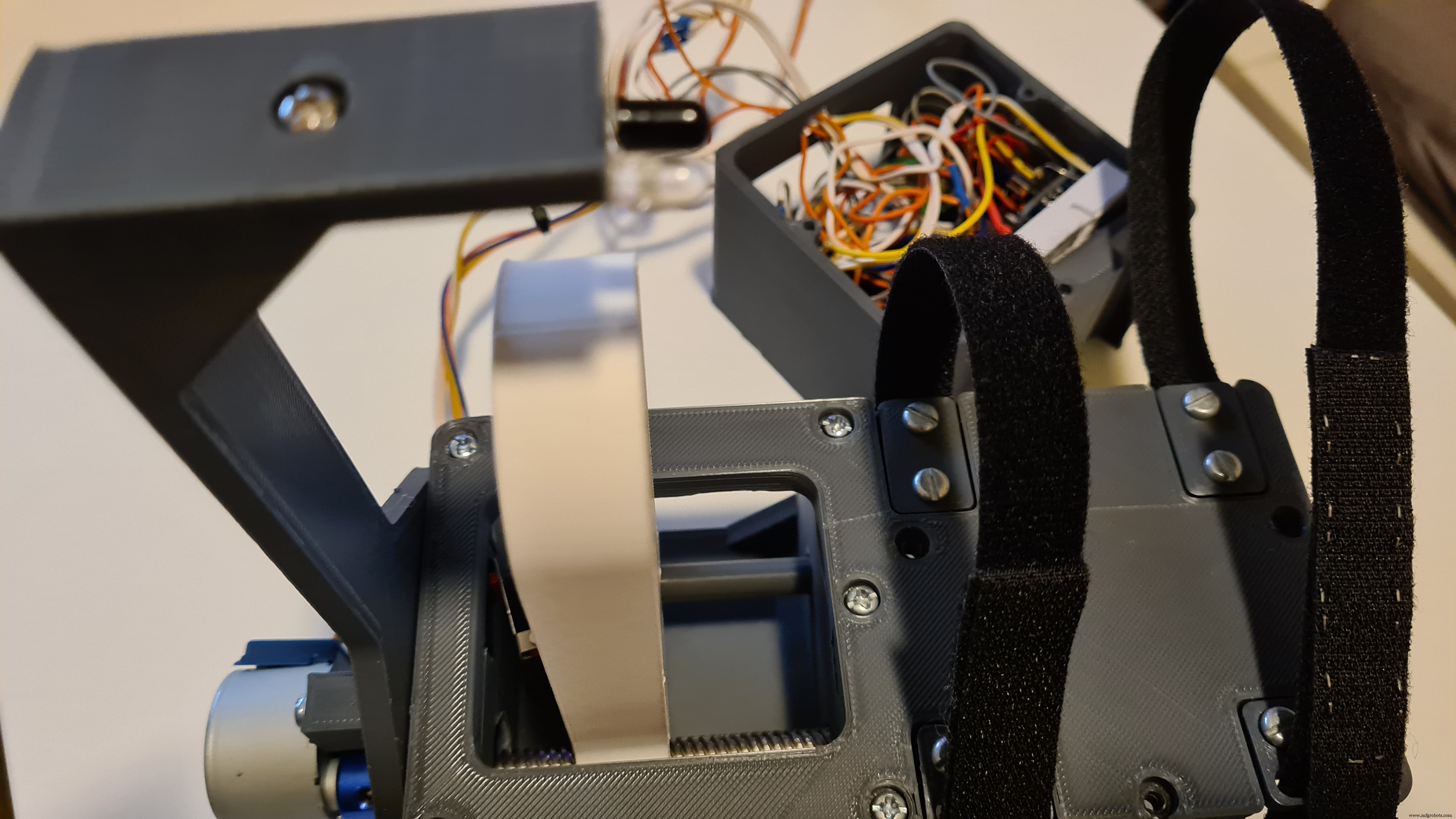
Zuletzt das Elektronikgehäuse mit 3 Schrauben am Deckel festschrauben! Gut gemacht, das Projekt ist abgeschlossen!
Fazit

Dieses Projekt eines Zubehörs, das die meisten Händedesinfektions-/Seifenspender vollständig automatisch und freihändig machen kann, ist endlich abgeschlossen!!
Vielen Dank für Ihre Zeit!!
Code
- Automatic_Hand_Sanitizer_Transformer.code
Automatic_Hand_Sanitizer_Transformer.codeArduino
Der Code des Gadgets// Pinbelegung &Motorschritte pro Umdrehung definierenconst int dirPin =2; // Wir definieren den Dir-Pin des Driverconst int stepPin =3; // Wir definieren den Step-Pin des Driverconst int enablePin =4; // Wir definieren den Enable-Pin des Driverconst int stepsPerRevolution =6000; // eine volle (360 Grad) Drehung ist 2048 Schritteint endStop =8; // wir definieren den Eingangspin des Endstopschaltersint irSensor =9; // wir definieren den Eingangspin des IR-Hindernissensorsvoid setup () {pinMode (endStop .) , INPUT); // Pins als Eingänge deklarieren pinMode (irSensor, INPUT); pinMode (stepPin, OUTPUT); // Pins als Ausgänge deklarieren pinMode (dirPin, OUTPUT); pinMode (enablePin, AUSGANG); digitalWrite (enablePin, LOW); // Dies aktiviert unseren Treiber während (digitalRead (endStop) ==LOW) // Wenn der Code startet, dreht sich der Stepper bis zum Endstoppschalter {// Stoppschalter wird aktiviert digitalWrite (dirPin, HIGH ); // die Richtungen sind gegen den Uhrzeigersinn eingestellt // Motor langsam drehen for(int x =0; x <1; x++) { DigitalWrite (stepPin, HIGH); VerzögerungMikrosekunden (2000); digitalWrite (stepPin, LOW); VerzögerungMikrosekunden (2000); } } digitalWrite (enablePin, HIGH); // Dies deaktiviert unseren Treiber, sodass der Treiber bei Nichtverwendung keinen Strom verbraucht ein Hindernis (Hand) vor dem IR-Hindernissensor {digitalWrite(enablePin, LOW); // Wir aktivieren den TreiberdigitalWrite (dirPin, LOW); // die Richtung ist im Uhrzeigersinn eingestellt // Motor langsam drehen für (int x =0; x Kundenspezifische Teile und Gehäuse
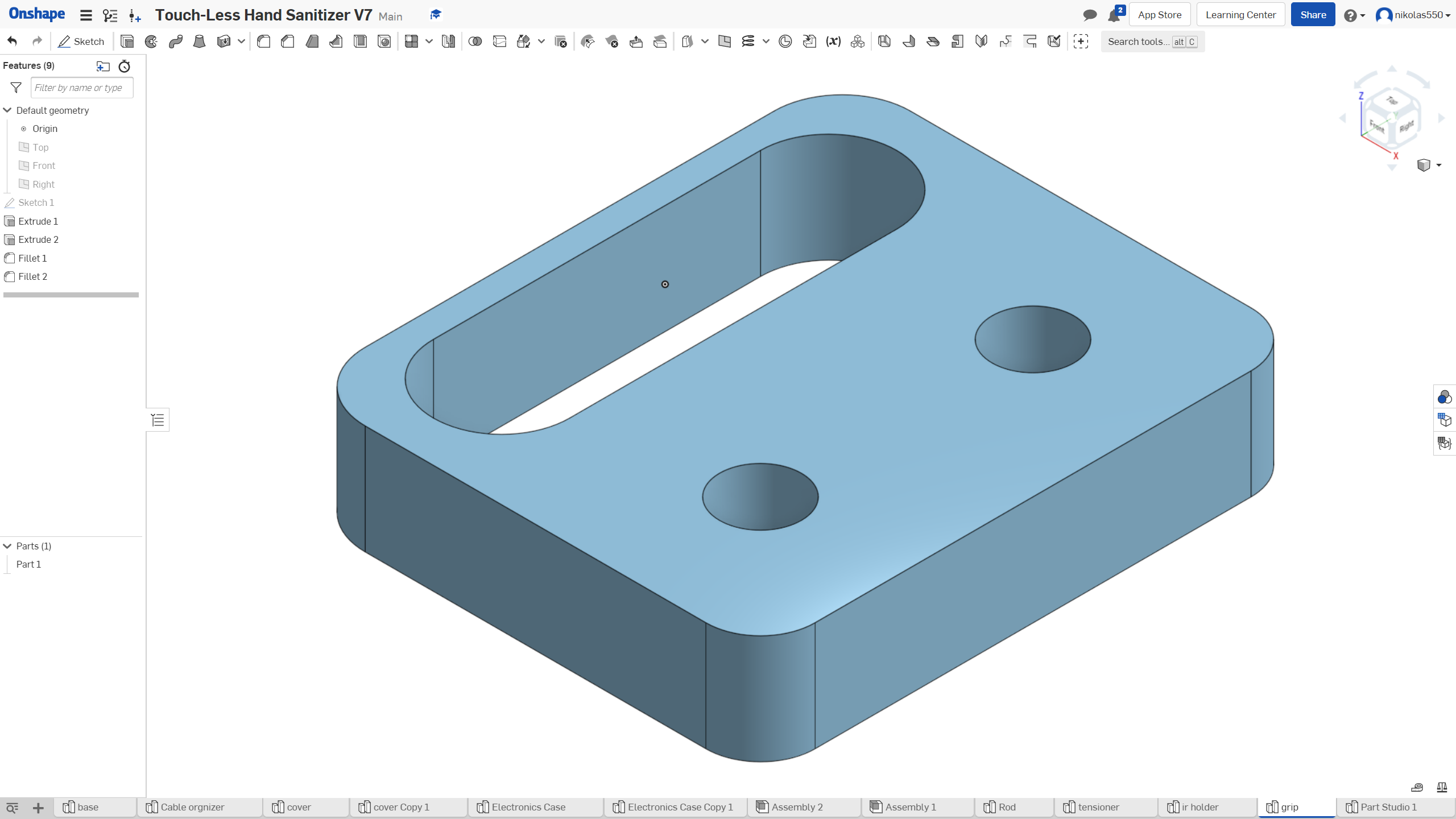
Die Hauptbasis des Geräts. Dies ist die Komponente, die den Spender tatsächlich drückt. Die Abdeckung des Geräts. Fungiert als Hülle für die Elektronik. Erzeugt den Klettverschluss-Mechanismus.Sie benötigen zwei davon. Funktioniert als Stütze für das Nähteil. Es wird mit der Basis verbunden und dient als Stütze für den IR-Sensor. Hält die Klettverschlüsse am Bezug fest.
Du brauchst 2 davon.
Schaltpläne
Herstellungsprozess