


Automatische Zugbeeinflussung
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Apps und Onlinedienste
 |
|
Über dieses Projekt
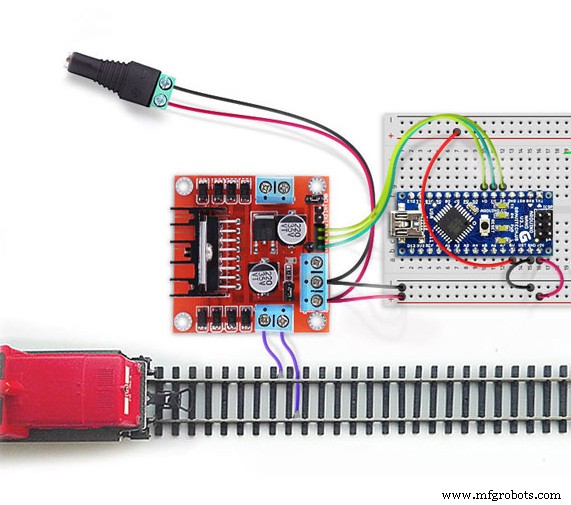
Dieses sehr einfache Schema ermöglicht es Ihnen, den Zug schnell in Ihren Fahrplan zu bringen. Sie können die Bewegungszeit und die Zughaltezeit anpassen. Zugbeschleunigung und -bremsung sind ebenfalls konfigurierbar. Durch Ändern der Zeitplanparameter in der Skizze können Sie jede Art von automatischer Bewegung erstellen. Schalten Sie einfach den Strom ein und Ihr Zug fährt ab.
Ändern der Zeitparameter in der Skizze:
// 1 | 0> Zeit <5 secif (counterScheduler <=5) { ......// 2 | 10 Sek.> Zeit <15 Sek. ((counterScheduler>=10) &&(counterScheduler <=15)) { ......// 3 | Richtung ändernif (counterScheduler ==16) {.... etc. erstellt einen Stundenplan.
Variablen:
int BremsDelta =5; int beschleunigenDelta =6; Definieren Sie die Bewegungsparameter des Zuges
Die Richtung des Zuges wird durch den Zustand der Pins D6 und D7 bestimmt:
// Standardrichtung auf FORWARD setzen digitalWrite(L298_IN1, HIGH); digitalWrite (L298_IN2, LOW); Sie können diese Skizze endlos ändern, um neue Optionen für die automatische Zugbewegung zu erhalten.
Willkommen an Bord!
Code
- Schaukel
Schaukel Arduino
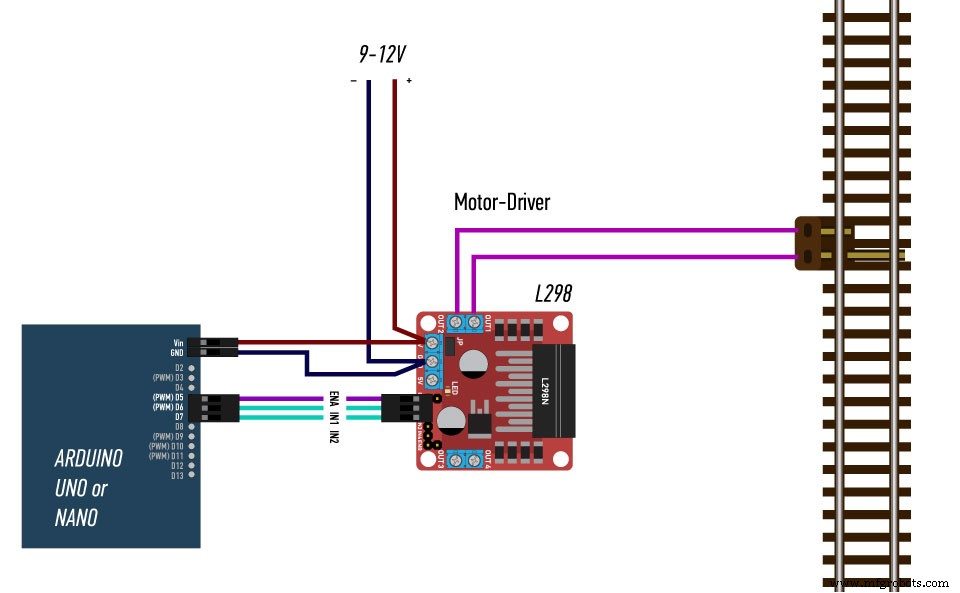
// L298 #define L298_ENA 5#define L298_IN1 6#define L298_IN2 7// SCRIPTS VARIABLESint counterScheduler;unsigned long timerScheduler =0;unsigned long timerLocal =0;byte speedAuto =0;void setup() {// Pins initialisieren pinMode (L298_ENA, AUSGANG); pinMode (L298_IN1, AUSGANG); pinMode (L298_IN2, OUTPUT); // Standardrichtung auf FORWARD setzen digitalWrite (L298_IN1, HIGH); digitalWrite (L298_IN2, LOW); }void loop() { // Scheduler starten if (millis()> (timerScheduler + 1000)) { // Häkchen alle 1 Sek. counterScheduler++; TimerScheduler =millis(); } // ------------- SCRIPT SWING int brakeDelta =5; int beschleunigenDelta =6; // 1 | 0> Zeit <5 Sek. if (counterScheduler <=5) { // Zug starten if (millis()> (timerLocal + 100)) { if (speedAuto <240) speedAuto =speedAuto + AccelerationDelta; sonst speedAuto =255; analogWrite (L298_ENA, speedAuto); TimerLocal =millis(); } } // 2 | 10 sec> Zeit <15 sec if ((counterScheduler>=10) &&(counterScheduler <=15)) { // Zug stoppen nach 10 sec // Zug stoppen if (millis()> (timerLocal + 100)) { if ( speedAuto> 30) speedAuto =speedAuto - BremsDelta; sonst speedAuto =0; analogWrite (L298_ENA, speedAuto); TimerLocal =millis(); } } // 3 | Richtung ändern if (counterScheduler ==16) { digitalWrite (L298_IN1, LOW); digitalWrite (L298_IN2, HOCH); } // 4 | 20 sec> Zeit <30 sec if ((counterScheduler>=20) &&(counterScheduler <=30)) { // Zug starten if (millis()> (timerLocal + 100)) { if (speedAuto <240) speedAuto =speedAuto + beschleunigenDelta; sonst speedAuto =255; analogWrite (L298_ENA, speedAuto); TimerLocal =millis(); } } // 5 | 31 Sek.> Zeit <40 Sek. if ((counterScheduler>=31) &&(counterScheduler <=40)) { // Zug anhalten // Zug anhalten if (millis()> (timerLocal + 100)) { if (speedAuto> 30 ) speedAuto =speedAuto - BremsDelta; sonst speedAuto =0; analogWrite (L298_ENA, speedAuto); TimerLocal =millis(); } } // 6 | Kehren Sie zu Schritt 1 zurück if (counterScheduler> 40) { counterScheduler =0; digitalWrite (L298_IN1, HIGH); digitalWrite (L298_IN2, LOW); }} Schaltpläne
Herstellungsprozess
- Steuerkreise
- Pool-Füllkontrolle
- Was ist Benchwork?
- Was ist Qualitätskontrolle?
- Was ist eine automatische Pressmaschine?
- Was ist eine automatische Kraftpresse?
- Was ist ein automatischer Rohrbieger?
- Was ist ein automatischer Drehtisch?
- Automatikgetriebe verstehen
- Verständnis des automatischen Schmiersystems