


Arduino und MPU6050 Beschleunigungsmesser und Gyroskop-Tutorial
In diesem Tutorial lernen wir, wie man den Beschleunigungsmesser MPU6050 und den Gyroskopsensor mit dem Arduino verwendet. Zuerst werde ich erklären, wie die MPU6050 funktioniert und wie die Daten daraus gelesen werden, und dann werden wir zwei praktische Beispiele machen.
Sie können sich das folgende Video ansehen oder das schriftliche Tutorial unten lesen.
Im ersten Beispiel erstellen wir mit der Processing-Entwicklungsumgebung eine 3D-Visualisierung der Sensorausrichtung, und im zweiten Beispiel erstellen wir eine einfache selbststabilisierende Plattform oder einen DIY-Gimbal. Basierend auf der MPU6050-Ausrichtung und ihren verschmolzenen Beschleunigungsmesser- und Gyroskopdaten steuern wir die drei Servos, die die Plattform waagerecht halten.
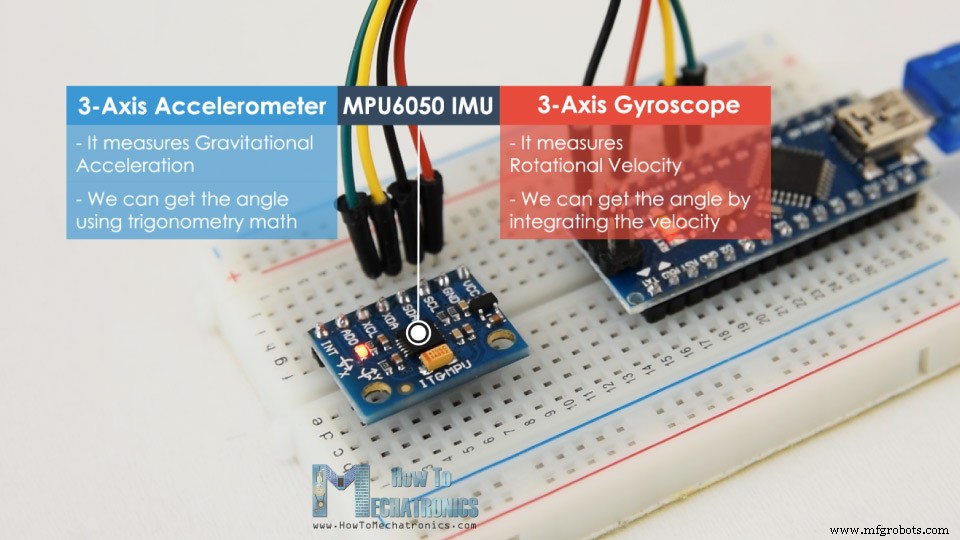
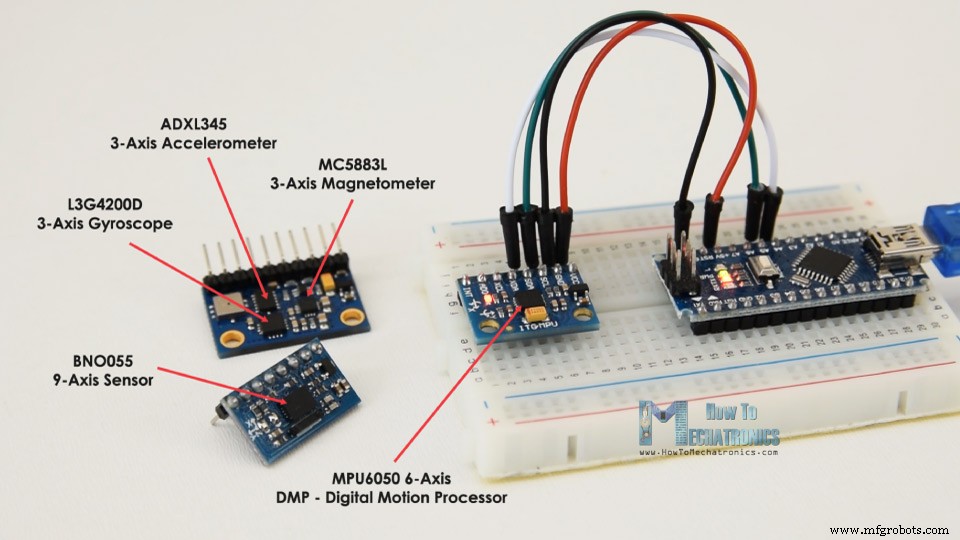
Die MPU6050 IMU verfügt über einen 3-Achsen-Beschleunigungsmesser und ein 3-Achsen-Gyroskop, die auf einem einzigen Chip integriert sind.
Das Gyroskop misst die Rotationsgeschwindigkeit oder Änderungsrate der Winkelposition über die Zeit entlang der X-, Y- und Z-Achse. Es verwendet die MEMS-Technologie und den Coriolis-Effekt zum Messen, aber für weitere Details dazu können Sie mein spezielles Tutorial zur Funktionsweise von MEMS-Sensoren lesen. Die Ausgänge des Gyroskops sind in Grad pro Sekunde, um also die Winkelposition zu erhalten, müssen wir nur die Winkelgeschwindigkeit integrieren.
Andererseits misst der Beschleunigungsmesser MPU6050 die Beschleunigung auf die gleiche Weise wie im vorherigen Video für den Beschleunigungssensor ADXL345 erklärt. Kurz gesagt, es kann die Gravitationsbeschleunigung entlang der 3 Achsen messen und mit etwas Trigonometrie-Mathematik können wir den Winkel berechnen, in dem der Sensor positioniert ist. Wenn wir also die Beschleunigungsmesser- und Gyroskopdaten fusionieren oder kombinieren, können wir sehr genaue Informationen über die Sensorausrichtung erhalten.
Die MPU6050 IMU wird aufgrund ihrer 6 Ausgänge oder der 3 Beschleunigungsmesserausgänge und der 3 Gyroskopausgänge auch als sechsachsiges Bewegungsverfolgungsgerät oder 6 DoF-Gerät (sechs Freiheitsgrade) bezeichnet.
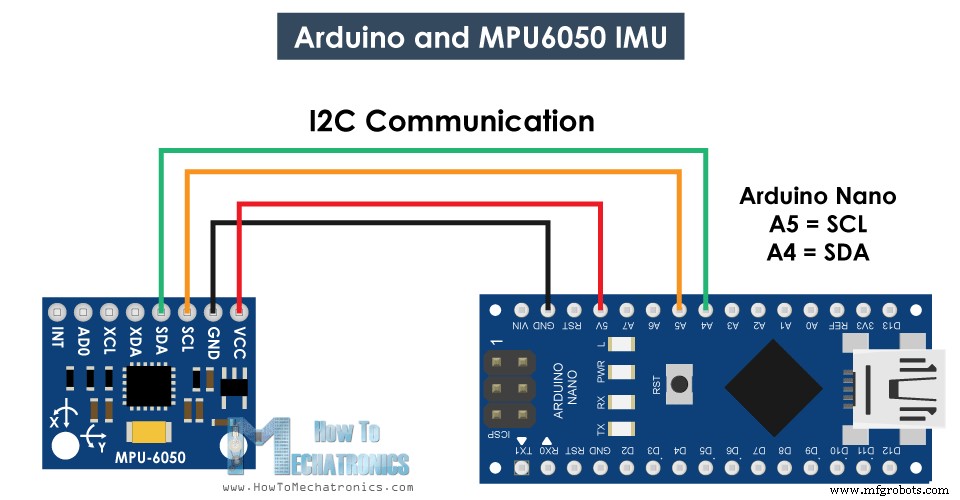
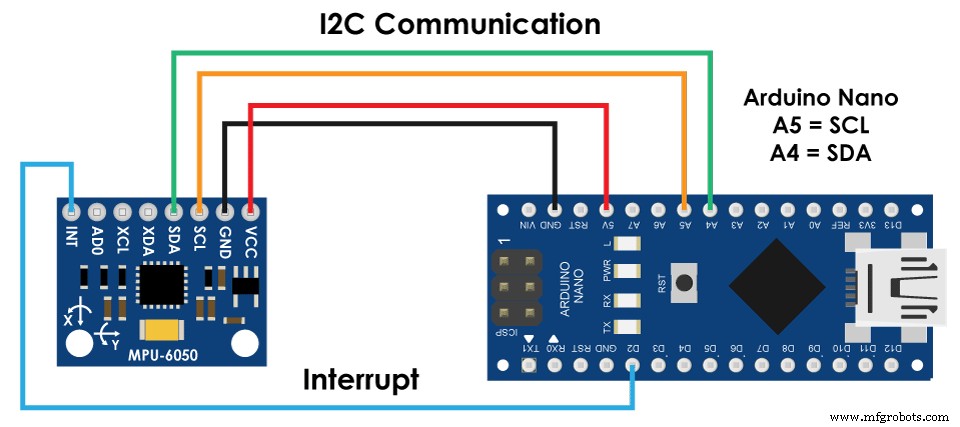
Schauen wir uns an, wie wir die Daten des MPU6050-Sensors mit dem Arduino verbinden und auslesen können. Wir verwenden das I2C-Protokoll für die Kommunikation mit dem Arduino, sodass wir nur zwei Drähte zum Anschließen benötigen, plus die zwei Drähte für die Stromversorgung.
Die für dieses Arduino-Tutorial benötigten Komponenten erhalten Sie über die folgenden Links:
Hier ist der Arduino-Code zum Lesen der Daten vom MPU6050-Sensor. Unterhalb des Codes finden Sie eine detaillierte Beschreibung.
Codebeschreibung: Also müssen wir zuerst die Wire.h-Bibliothek einbinden, die für die I2C-Kommunikation verwendet wird, und einige Variablen definieren, die zum Speichern der Daten benötigt werden.
Im Setup-Abschnitt müssen wir die Kabelbibliothek initialisieren und den Sensor über das Power-Management-Register zurücksetzen. Dazu müssen wir einen Blick auf das Datenblatt des Sensors werfen, wo wir die Registeradresse sehen können.
Wenn wir möchten, können wir auch den Full-Scale-Bereich für den Beschleunigungsmesser und das Gyroskop mithilfe ihrer Konfigurationsregister auswählen. Für dieses Beispiel verwenden wir den Standardbereich von +-2 g für den Beschleunigungsmesser und den Bereich von 250 Grad/s für das Gyroskop, daher lasse ich diesen Teil des Codes kommentiert.
Im Schleifenabschnitt beginnen wir mit dem Lesen der Beschleunigungsmesserdaten. Die Daten für jede Achse werden in zwei Bytes oder Registern gespeichert und wir können die Adressen dieser Register aus dem Datenblatt des Sensors entnehmen.
Um sie alle zu lesen, beginnen wir mit dem ersten Register und fordern mit der Funktion requiestFrom() an, alle 6 Register für die X-, Y- und Z-Achse zu lesen. Dann lesen wir die Daten aus jedem Register, und da die Ausgänge Zweierkomplemente sind, kombinieren wir sie entsprechend, um die richtigen Werte zu erhalten.
Um Ausgabewerte von -1g bis +1g zu erhalten, die für die Berechnung der Winkel geeignet sind, teilen wir die Ausgabe mit der zuvor ausgewählten Empfindlichkeit.
Schließlich berechnen wir mit diesen beiden Formeln die Roll- und Nickwinkel aus den Beschleunigungsmesserdaten.
Als nächstes erhalten wir mit der gleichen Methode die Gyroskopdaten.
Wir lesen die sechs Kreiselregister aus, kombinieren ihre Daten passend und dividieren sie durch die zuvor gewählte Empfindlichkeit, um die Ausgabe in Grad pro Sekunde zu erhalten.
Hier können Sie feststellen, dass ich die Ausgabewerte mit einigen kleinen berechneten Fehlerwerten korrigiere, die ich gleich erklären werde, wie wir sie erhalten. Da die Ausgaben in Grad pro Sekunde sind, müssen wir sie jetzt mit der Zeit multiplizieren, um nur Grad zu erhalten. Der Zeitwert wird vor jeder Leseiteration mit der Funktion millis() erfasst.
Schließlich fusionieren wir die Daten des Beschleunigungssensors und des Gyroskops unter Verwendung eines komplementären Filters. Hier nehmen wir 96 % der Gyroskopdaten, weil sie sehr genau sind und nicht unter äußeren Kräften leiden. Die Kehrseite des Gyroskops ist, dass es driftet oder im Laufe der Zeit Fehler in die Ausgabe einführt. Daher verwenden wir langfristig die Daten des Beschleunigungsmessers, in diesem Fall 4 %, genug, um den Driftfehler des Gyroskops zu eliminieren.
Da wir das Gieren jedoch nicht aus den Beschleunigungsmesserdaten berechnen können, können wir den Komplementärfilter nicht dafür implementieren.
Bevor wir uns die Ergebnisse ansehen, lassen Sie mich kurz erklären, wie Sie die Fehlerkorrekturwerte erhalten. Um diese Fehler zu berechnen, können wir die benutzerdefinierte Funktion compute_IMU_error() aufrufen, während sich der Sensor in einer flachen Ruheposition befindet. Hier machen wir 200 Messwerte für alle Ausgänge, wir summieren sie und dividieren sie durch 200. Da wir den Sensor in einer flachen Ruheposition halten, sollten die erwarteten Ausgangswerte 0 sein. Mit dieser Berechnung können wir also den durchschnittlichen Fehler des Sensors erhalten macht.
Wir drucken einfach die Werte auf dem seriellen Monitor aus und sobald wir sie kennen, können wir sie wie zuvor gezeigt im Code implementieren, sowohl für die Roll- und Nickberechnung als auch für die 3 Gyroskopausgänge.
Schließlich können wir mit der Serial.print-Funktion die Roll-, Pitch- und Yaw-Werte auf dem seriellen Monitor drucken und sehen, ob der Sensor richtig funktioniert.
Um das 3D-Visualisierungsbeispiel zu erstellen, müssen wir als Nächstes nur diese Daten akzeptieren, die das Arduino über die serielle Schnittstelle in der Processing-Entwicklungsumgebung sendet. Hier ist der vollständige Verarbeitungscode:
Hier lesen wir die eingehenden Daten vom Arduino und setzen sie in die entsprechenden Roll-, Pitch- und Yaw-Variablen. In der Hauptzeichnungsschleife verwenden wir diese Werte, um das 3D-Objekt zu drehen, in diesem Fall ist das ein einfaches Kästchen mit einer bestimmten Farbe und Text darauf.
Wenn wir die Skizze ausführen, können wir sehen, wie gut der MPU6050-Sensor für die Verfolgung der Orientierung ist. Das 3D-Objekt verfolgt die Ausrichtung des Sensors ziemlich genau und reagiert auch sehr schnell.
Wie ich bereits erwähnt habe, besteht der einzige Nachteil darin, dass das Gieren mit der Zeit abdriften wird, da wir den komplementären Filter dafür nicht verwenden können. Um dies zu verbessern, müssen wir einen zusätzlichen Sensor verwenden. Das ist normalerweise ein Magnetometer, das als Langzeitkorrektur für die Gierdrift des Kreisels verwendet werden kann. Die MPU6050 verfügt jedoch tatsächlich über eine Funktion namens Digital Motion Processor, die für Onboard-Berechnungen der Daten verwendet wird und in der Lage ist, die Gierdrift zu eliminieren.
Hier ist dasselbe 3D-Beispiel mit dem verwendeten Digital Motion Processor. Wir können sehen, wie genau die Orientierungsverfolgung jetzt ist, ohne die Gierdrift. Der Onboard-Prozessor kann auch Quaternionen berechnen und ausgeben, die zur Darstellung von Orientierungen und Drehungen von Objekten in drei Dimensionen verwendet werden. In diesem Beispiel verwenden wir tatsächlich Quaternionen zur Darstellung der Orientierung, die auch nicht unter der Gimbal-Sperre leidet, die bei der Verwendung von Euler-Winkeln auftritt.
Trotzdem ist es etwas komplizierter, diese Daten vom Sensor zu erhalten, als wir zuvor erklärt haben. Zuerst müssen wir einen zusätzlichen Draht mit einem digitalen Pin von Arduino verbinden. Das ist ein Interrupt-Pin, der zum Lesen dieses Datentyps von der MPU6050 verwendet wird.
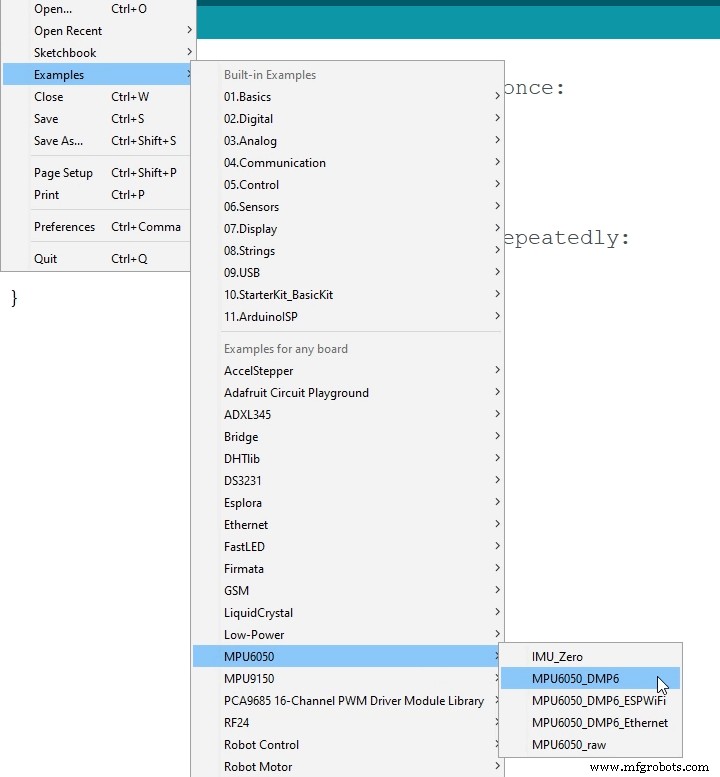
Der Code ist auch etwas komplizierter, deshalb verwenden wir die i2cdevlib-Bibliothek von Jeff Rowberg. Diese Bibliothek kann von GitHub heruntergeladen werden und ich werde einen Link dazu in den Website-Artikel einfügen.
Sobald wir die Bibliothek installiert haben, können wir das Beispiel MPU6050_DMP6 aus der Bibliothek öffnen. Dieses Beispiel ist mit Kommentaren für jede Zeile gut erklärt.
Hier können wir auswählen, welche Art von Ausgabe wir wollen, Quaternionen, Euler-Winkel, Gieren, Nicken und Rollen, Beschleunigungswerte oder Quaternionen für die 3D-Visualisierung. Diese Bibliothek enthält auch eine Verarbeitungsskizze für das 3D-Visualisierungsbeispiel. Ich habe es nur geändert, um die Kastenform wie im vorherigen Beispiel zu erhalten. Hier ist der Verarbeitungscode für die 3D-Visualisierung, der mit dem Beispiel MPU6050_DPM6 für die ausgewählte „OUTPUT_TEAPOT“-Ausgabe funktioniert:
Hier erhalten wir also mit der Funktion serialEvent() die Quaternionen, die vom Arduino kommen, und in der Hauptzeichenschleife verwenden wir sie, um das 3D-Objekt zu drehen. Wenn wir die Skizze ausführen, können wir sehen, wie gut Quaternionen zum Drehen von Objekten in drei Dimensionen geeignet sind.
Um dieses Tutorial nicht zu überladen, habe ich das zweite Beispiel, den DIY-Arduino-Gimbal oder die selbststabilisierende Plattform, in einem separaten Artikel platziert.
Fühlen Sie sich frei, Fragen zu diesem Tutorial in den Kommentaren unten zu stellen, und vergessen Sie auch nicht, meine Sammlung von Arduino-Projekten zu überprüfen.Übersicht
Wie es funktioniert
Arduino und MPU6050
MPU6050-Arduino-Code
/*
Arduino and MPU6050 Accelerometer and Gyroscope Sensor Tutorial
by Dejan, https://howtomechatronics.com
*/
#include <Wire.h>
const int MPU = 0x68; // MPU6050 I2C address
float AccX, AccY, AccZ;
float GyroX, GyroY, GyroZ;
float accAngleX, accAngleY, gyroAngleX, gyroAngleY, gyroAngleZ;
float roll, pitch, yaw;
float AccErrorX, AccErrorY, GyroErrorX, GyroErrorY, GyroErrorZ;
float elapsedTime, currentTime, previousTime;
int c = 0;
void setup() {
Serial.begin(19200);
Wire.begin(); // Initialize comunication
Wire.beginTransmission(MPU); // Start communication with MPU6050 // MPU=0x68
Wire.write(0x6B); // Talk to the register 6B
Wire.write(0x00); // Make reset - place a 0 into the 6B register
Wire.endTransmission(true); //end the transmission
/*
// Configure Accelerometer Sensitivity - Full Scale Range (default +/- 2g)
Wire.beginTransmission(MPU);
Wire.write(0x1C); //Talk to the ACCEL_CONFIG register (1C hex)
Wire.write(0x10); //Set the register bits as 00010000 (+/- 8g full scale range)
Wire.endTransmission(true);
// Configure Gyro Sensitivity - Full Scale Range (default +/- 250deg/s)
Wire.beginTransmission(MPU);
Wire.write(0x1B); // Talk to the GYRO_CONFIG register (1B hex)
Wire.write(0x10); // Set the register bits as 00010000 (1000deg/s full scale)
Wire.endTransmission(true);
delay(20);
*/
// Call this function if you need to get the IMU error values for your module
calculate_IMU_error();
delay(20);
}
void loop() {
// === Read acceleromter data === //
Wire.beginTransmission(MPU);
Wire.write(0x3B); // Start with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true); // Read 6 registers total, each axis value is stored in 2 registers
//For a range of +-2g, we need to divide the raw values by 16384, according to the datasheet
AccX = (Wire.read() << 8 | Wire.read()) / 16384.0; // X-axis value
AccY = (Wire.read() << 8 | Wire.read()) / 16384.0; // Y-axis value
AccZ = (Wire.read() << 8 | Wire.read()) / 16384.0; // Z-axis value
// Calculating Roll and Pitch from the accelerometer data
accAngleX = (atan(AccY / sqrt(pow(AccX, 2) + pow(AccZ, 2))) * 180 / PI) - 0.58; // AccErrorX ~(0.58) See the calculate_IMU_error()custom function for more details
accAngleY = (atan(-1 * AccX / sqrt(pow(AccY, 2) + pow(AccZ, 2))) * 180 / PI) + 1.58; // AccErrorY ~(-1.58)
// === Read gyroscope data === //
previousTime = currentTime; // Previous time is stored before the actual time read
currentTime = millis(); // Current time actual time read
elapsedTime = (currentTime - previousTime) / 1000; // Divide by 1000 to get seconds
Wire.beginTransmission(MPU);
Wire.write(0x43); // Gyro data first register address 0x43
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true); // Read 4 registers total, each axis value is stored in 2 registers
GyroX = (Wire.read() << 8 | Wire.read()) / 131.0; // For a 250deg/s range we have to divide first the raw value by 131.0, according to the datasheet
GyroY = (Wire.read() << 8 | Wire.read()) / 131.0;
GyroZ = (Wire.read() << 8 | Wire.read()) / 131.0;
// Correct the outputs with the calculated error values
GyroX = GyroX + 0.56; // GyroErrorX ~(-0.56)
GyroY = GyroY - 2; // GyroErrorY ~(2)
GyroZ = GyroZ + 0.79; // GyroErrorZ ~ (-0.8)
// Currently the raw values are in degrees per seconds, deg/s, so we need to multiply by sendonds (s) to get the angle in degrees
gyroAngleX = gyroAngleX + GyroX * elapsedTime; // deg/s * s = deg
gyroAngleY = gyroAngleY + GyroY * elapsedTime;
yaw = yaw + GyroZ * elapsedTime;
// Complementary filter - combine acceleromter and gyro angle values
roll = 0.96 * gyroAngleX + 0.04 * accAngleX;
pitch = 0.96 * gyroAngleY + 0.04 * accAngleY;
// Print the values on the serial monitor
Serial.print(roll);
Serial.print("/");
Serial.print(pitch);
Serial.print("/");
Serial.println(yaw);
}
void calculate_IMU_error() {
// We can call this funtion in the setup section to calculate the accelerometer and gyro data error. From here we will get the error values used in the above equations printed on the Serial Monitor.
// Note that we should place the IMU flat in order to get the proper values, so that we then can the correct values
// Read accelerometer values 200 times
while (c < 200) {
Wire.beginTransmission(MPU);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true);
AccX = (Wire.read() << 8 | Wire.read()) / 16384.0 ;
AccY = (Wire.read() << 8 | Wire.read()) / 16384.0 ;
AccZ = (Wire.read() << 8 | Wire.read()) / 16384.0 ;
// Sum all readings
AccErrorX = AccErrorX + ((atan((AccY) / sqrt(pow((AccX), 2) + pow((AccZ), 2))) * 180 / PI));
AccErrorY = AccErrorY + ((atan(-1 * (AccX) / sqrt(pow((AccY), 2) + pow((AccZ), 2))) * 180 / PI));
c++;
}
//Divide the sum by 200 to get the error value
AccErrorX = AccErrorX / 200;
AccErrorY = AccErrorY / 200;
c = 0;
// Read gyro values 200 times
while (c < 200) {
Wire.beginTransmission(MPU);
Wire.write(0x43);
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true);
GyroX = Wire.read() << 8 | Wire.read();
GyroY = Wire.read() << 8 | Wire.read();
GyroZ = Wire.read() << 8 | Wire.read();
// Sum all readings
GyroErrorX = GyroErrorX + (GyroX / 131.0);
GyroErrorY = GyroErrorY + (GyroY / 131.0);
GyroErrorZ = GyroErrorZ + (GyroZ / 131.0);
c++;
}
//Divide the sum by 200 to get the error value
GyroErrorX = GyroErrorX / 200;
GyroErrorY = GyroErrorY / 200;
GyroErrorZ = GyroErrorZ / 200;
// Print the error values on the Serial Monitor
Serial.print("AccErrorX: ");
Serial.println(AccErrorX);
Serial.print("AccErrorY: ");
Serial.println(AccErrorY);
Serial.print("GyroErrorX: ");
Serial.println(GyroErrorX);
Serial.print("GyroErrorY: ");
Serial.println(GyroErrorY);
Serial.print("GyroErrorZ: ");
Serial.println(GyroErrorZ);
} Codesprache:Arduino (arduino) 
// Configure Accelerometer Sensitivity - Full Scale Range (default +/- 2g)
Wire.beginTransmission(MPU);
Wire.write(0x1C); //Talk to the ACCEL_CONFIG register (1C hex)
Wire.write(0x10); //Set the register bits as 00010000 (+/- 8g full scale range)
Wire.endTransmission(true);
// Configure Gyro Sensitivity - Full Scale Range (default +/- 250deg/s)
Wire.beginTransmission(MPU);
Wire.write(0x1B); // Talk to the GYRO_CONFIG register (1B hex)
Wire.write(0x10); // Set the register bits as 00010000 (1000deg/s full scale)
Wire.endTransmission(true);
*/ Codesprache:Arduino (arduino) 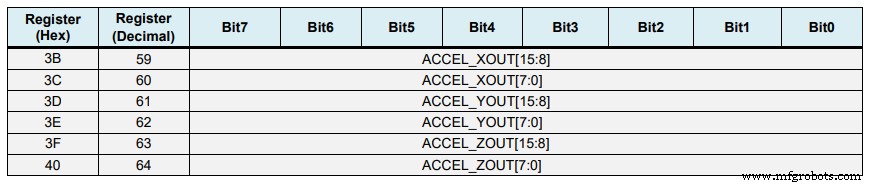
// === Read acceleromter data === //
Wire.beginTransmission(MPU);
Wire.write(0x3B); // Start with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true); // Read 6 registers total, each axis value is stored in 2 registers
//For a range of +-2g, we need to divide the raw values by 16384, according to the datasheet
AccX = (Wire.read() << 8 | Wire.read()) / 16384.0; // X-axis value
AccY = (Wire.read() << 8 | Wire.read()) / 16384.0; // Y-axis value
AccZ = (Wire.read() << 8 | Wire.read()) / 16384.0; // Z-axis value Codesprache:Arduino (arduino) 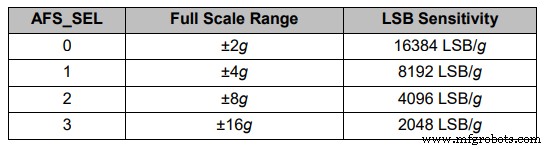
// Calculating Roll and Pitch from the accelerometer data
accAngleX = (atan(AccY / sqrt(pow(AccX, 2) + pow(AccZ, 2))) * 180 / PI) - 0.58; // AccErrorX ~(0.58) See the calculate_IMU_error()custom function for more details
accAngleY = (atan(-1 * AccX / sqrt(pow(AccY, 2) + pow(AccZ, 2))) * 180 / PI) + 1.58; // AccErrorY ~(-1.58) Codesprache:Arduino (arduino) 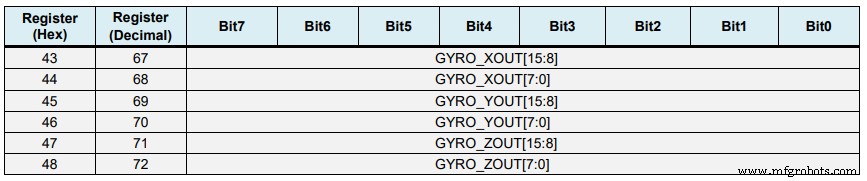
// === Read gyroscope data === //
previousTime = currentTime; // Previous time is stored before the actual time read
currentTime = millis(); // Current time actual time read
elapsedTime = (currentTime - previousTime) / 1000; // Divide by 1000 to get seconds
Wire.beginTransmission(MPU);
Wire.write(0x43); // Gyro data first register address 0x43
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true); // Read 4 registers total, each axis value is stored in 2 registers
GyroX = (Wire.read() << 8 | Wire.read()) / 131.0; // For a 250deg/s range we have to divide first the raw value by 131.0, according to the datasheet
GyroY = (Wire.read() << 8 | Wire.read()) / 131.0;
GyroZ = (Wire.read() << 8 | Wire.read()) / 131.0; Codesprache:Arduino (arduino) 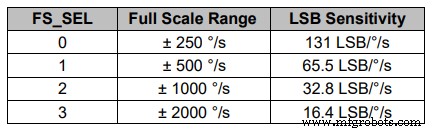
// Correct the outputs with the calculated error values
GyroX = GyroX + 0.56; // GyroErrorX ~(-0.56)
GyroY = GyroY - 2; // GyroErrorY ~(2)
GyroZ = GyroZ + 0.79; // GyroErrorZ ~ (-0.8)
// Currently the raw values are in degrees per seconds, deg/s, so we need to multiply by sendonds (s) to get the angle in degrees
gyroAngleX = gyroAngleX + GyroX * elapsedTime; // deg/s * s = deg
gyroAngleY = gyroAngleY + GyroY * elapsedTime;
yaw = yaw + GyroZ * elapsedTime; Codesprache:Arduino (arduino) // Complementary filter - combine acceleromter and gyro angle values
roll = 0.96 * gyroAngleX + 0.04 * accAngleX;
pitch = 0.96 * gyroAngleY + 0.04 * accAngleY; Codesprache:Arduino (arduino) void calculate_IMU_error() {
// We can call this funtion in the setup section to calculate the accelerometer and gyro data error. From here we will get the error values used in the above equations printed on the Serial Monitor.
// Note that we should place the IMU flat in order to get the proper values, so that we then can the correct values
// Read accelerometer values 200 times
while (c < 200) {
Wire.beginTransmission(MPU);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true);
AccX = (Wire.read() << 8 | Wire.read()) / 16384.0 ;
AccY = (Wire.read() << 8 | Wire.read()) / 16384.0 ;
AccZ = (Wire.read() << 8 | Wire.read()) / 16384.0 ;
// Sum all readings
AccErrorX = AccErrorX + ((atan((AccY) / sqrt(pow((AccX), 2) + pow((AccZ), 2))) * 180 / PI));
AccErrorY = AccErrorY + ((atan(-1 * (AccX) / sqrt(pow((AccY), 2) + pow((AccZ), 2))) * 180 / PI));
c++;
}
//Divide the sum by 200 to get the error value
AccErrorX = AccErrorX / 200;
AccErrorY = AccErrorY / 200;
c = 0;
// Read gyro values 200 times
while (c < 200) {
Wire.beginTransmission(MPU);
Wire.write(0x43);
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true);
GyroX = Wire.read() << 8 | Wire.read();
GyroY = Wire.read() << 8 | Wire.read();
GyroZ = Wire.read() << 8 | Wire.read();
// Sum all readings
GyroErrorX = GyroErrorX + (GyroX / 131.0);
GyroErrorY = GyroErrorY + (GyroY / 131.0);
GyroErrorZ = GyroErrorZ + (GyroZ / 131.0);
c++;
}
//Divide the sum by 200 to get the error value
GyroErrorX = GyroErrorX / 200;
GyroErrorY = GyroErrorY / 200;
GyroErrorZ = GyroErrorZ / 200;
// Print the error values on the Serial Monitor
Serial.print("AccErrorX: ");
Serial.println(AccErrorX);
Serial.print("AccErrorY: ");
Serial.println(AccErrorY);
Serial.print("GyroErrorX: ");
Serial.println(GyroErrorX);
Serial.print("GyroErrorY: ");
Serial.println(GyroErrorY);
Serial.print("GyroErrorZ: ");
Serial.println(GyroErrorZ);
} Codesprache:Arduino (arduino) 
MPU6050 Orientierungsverfolgung – 3D-Visualisierung
/*
Arduino and MPU6050 IMU - 3D Visualization Example
by Dejan, https://howtomechatronics.com
*/
import processing.serial.*;
import java.awt.event.KeyEvent;
import java.io.IOException;
Serial myPort;
String data="";
float roll, pitch,yaw;
void setup() {
size (2560, 1440, P3D);
myPort = new Serial(this, "COM7", 19200); // starts the serial communication
myPort.bufferUntil('\n');
}
void draw() {
translate(width/2, height/2, 0);
background(233);
textSize(22);
text("Roll: " + int(roll) + " Pitch: " + int(pitch), -100, 265);
// Rotate the object
rotateX(radians(-pitch));
rotateZ(radians(roll));
rotateY(radians(yaw));
// 3D 0bject
textSize(30);
fill(0, 76, 153);
box (386, 40, 200); // Draw box
textSize(25);
fill(255, 255, 255);
text("www.HowToMechatronics.com", -183, 10, 101);
//delay(10);
//println("ypr:\t" + angleX + "\t" + angleY); // Print the values to check whether we are getting proper values
}
// Read data from the Serial Port
void serialEvent (Serial myPort) {
// reads the data from the Serial Port up to the character '.' and puts it into the String variable "data".
data = myPort.readStringUntil('\n');
// if you got any bytes other than the linefeed:
if (data != null) {
data = trim(data);
// split the string at "/"
String items[] = split(data, '/');
if (items.length > 1) {
//--- Roll,Pitch in degrees
roll = float(items[0]);
pitch = float(items[1]);
yaw = float(items[2]);
}
}
} Codesprache:Arduino (arduino) 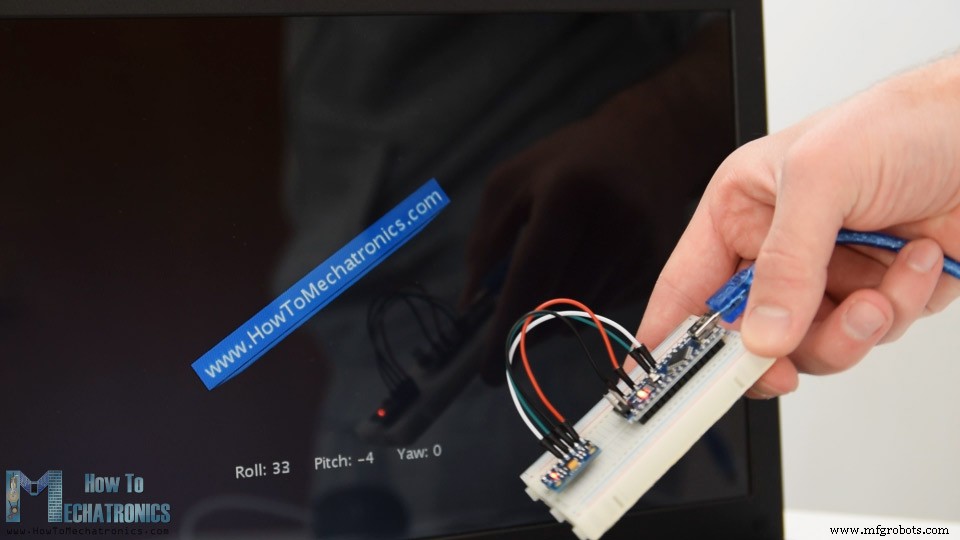
/*
Arduino and MPU6050 IMU - 3D Visualization Example
by Dejan, https://howtomechatronics.com
*/
import processing.serial.*;
import java.awt.event.KeyEvent;
import java.io.IOException;
Serial myPort;
String data="";
float roll, pitch,yaw;
void setup() {
size (2560, 1440, P3D);
myPort = new Serial(this, "COM7", 19200); // starts the serial communication
myPort.bufferUntil('\n');
}
void draw() {
translate(width/2, height/2, 0);
background(233);
textSize(22);
text("Roll: " + int(roll) + " Pitch: " + int(pitch), -100, 265);
// Rotate the object
rotateX(radians(-pitch));
rotateZ(radians(roll));
rotateY(radians(yaw));
// 3D 0bject
textSize(30);
fill(0, 76, 153);
box (386, 40, 200); // Draw box
textSize(25);
fill(255, 255, 255);
text("www.HowToMechatronics.com", -183, 10, 101);
//delay(10);
//println("ypr:\t" + angleX + "\t" + angleY); // Print the values to check whether we are getting proper values
}
// Read data from the Serial Port
void serialEvent (Serial myPort) {
// reads the data from the Serial Port up to the character '.' and puts it into the String variable "data".
data = myPort.readStringUntil('\n');
// if you got any bytes other than the linefeed:
if (data != null) {
data = trim(data);
// split the string at "/"
String items[] = split(data, '/');
if (items.length > 1) {
//--- Roll,Pitch in degrees
roll = float(items[0]);
pitch = float(items[1]);
yaw = float(items[2]);
}
}
} Codesprache:Arduino (arduino) 
Herstellungsprozess
- Anleitung zum Arduino-RFID-Schloss
- LCD-Animation und -Spiele
- Steuerung des Servomotors mit Arduino und MPU6050
- Python3- und Arduino-Kommunikation
- FM-Radio mit Arduino und RDA8057M
- Beschleunigung in Winkel vom MPU6050 I2C-Sensor umwandeln
- Anleitung zum Arduino-Fingerabdrucksensor
- Arduino-Tutorial:Mini-Klavier
- Raspberry Pi und Arduino-Laptop
- Arduino-Tutorial 01:Erste Schritte