


PID-Steuerung eines Robotergreifers in Matlab / Simulink
In diesem Tutorial werden wir sehen, wie wir die PID-Steuerung des 3D-Modells eines Robotergreifmechanismus durchführen. Das Simulink-Modell ist in zwei Subsysteme organisiert. Ein Gleichstrommotor-Subsystem, das mithilfe von Simulink-Blöcken modelliert wird, und ein 3D-Modell, das mithilfe von SimMechanics Link aus Solidworks importiert wird. Wir verwenden eine Schrittfunktion, um den DC-Motor zu aktivieren, um den Robotergreifer anzutreiben, und wir verwenden den Simulink-PID-Block, um die PID-Parameter automatisch abzustimmen.
Sie können sich das folgende Video ansehen oder das schriftliche Tutorial unten lesen.
Laden Sie das Simulink-Modell aus dem Beispiel hier herunter:
Unter folgendem Link finden Sie das 3D-Modell des Robotergreifmechanismus und laden es herunter: 
Simulink-Modell – PID-Regelung
1 Datei(en) 538,71 KB Herunterladen 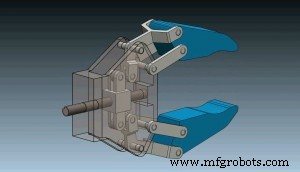
Herstellungsprozess
- Die Zukunft der Robotik
- Antibabypille
- Modelleisenbahn
- Industrieroboter
- Tutorial – sPiRobot:Steuern und sehen Sie, was Ihr Roboter von überall sieht
- Recycling-Sortierroboter mit Google Coral
- MATLAB-Simulink
- Grundprinzipien der PID-Regelung und Schleifenabstimmung
- PID-Steuerung eines Robotergreifers in Matlab / Simulink
- Solidworks- und Matlab/Simulink-Simulation