


Die Zukunft der Robotik
Die Zukunft der Robotik ist verteilt. Jeder komplexe Roboter ist ein verteilter Satz von Modulen und Systemen, manche autonom, manche halbautonom und manche menschlich gesteuert, die alle eng zusammenarbeiten, um ein einziges zusammenhängendes System aus zusammenwirkenden Teilen zu bilden. In der Telerobotik versuchen wir, die Teleoperation eines Roboters zu ermöglichen und dem Bediener ein menschliches Gefühl zu geben, wo der Roboter eingesetzt wird, indem wir den menschlichen Bedienern Videos und Interaktionskräfte zur Verfügung stellen.
Für die ESA bedeutet dies im Weltraum oder auf einer feindlichen Planetenoberfläche. Der menschliche Operator kann sich auf einer Raumstation oder sogar wieder auf der Erde befinden!
Dazu ermöglichen wir Telepräsenz durch eine Kombination aus haptischem Force-Feedback an den Bediener in Kombination mit Augmented-Reality-Video.
Die Bereitstellung von sowohl Sicht- als auch Berührungs-Feedback für den Benutzer ermöglicht Telepräsenz. Je realistischer und informativer das Feedback ist, desto besser ist die Wahrnehmung der Telepräsenz durch den Bediener, was zu einer besseren Roboterfernbedienung führt.
Die kritische Herausforderung für die ESA bei der Weltraumteleoperation ist die Kommunikationsverbindung. Es gibt viele Echtzeit-Regelkreise in Robotern, aber der zwischen dem Menschen und dem entfernten Roboter in einem Teleoperationssystem ist am problematischsten. Mehrere Regelkreise laufen über eine paketvermittelte Netzwerkverbindung, die das allerschlimmste Kommunikationsverhalten zeigt. Die Verbindung kann jederzeit getrennt werden, die Latenz kann oft in Sekunden gemessen werden und kann stark variieren, außerdem kommt es regelmäßig zu Paketverlusten; dies gilt für die Kommunikation über das Internet ebenso wie für den Weltraum. Dennoch müssen wir das gesamte Video über diesen Link senden, die Zeit korreliert mit dem Status der Robotersteuerung und den Steuerbefehlen an beiden Enden. Dies bedeutet, dass der Verbindungsstatus ein integraler Bestandteil des Regelkreises werden muss, mit ausreichenden Informationen an beiden Enden, damit der Bediener angemessen reagieren kann und der entfernte Roboter sich selbst in einem sicheren und stabilen Zustand hält. Der Verbindungsstatus muss ein integraler Bestandteil des Systemstatus werden.
Das Entwicklungsteam der ESA besteht aus Mechatronikern, Computer-Vision-Spezialisten, Steuerungstheoretikern und einigen Software-Ingenieuren. Uns war schon früh klar, dass wir nach einer gemeinsamen Methode suchen mussten, um die Systemanforderungen und Schnittstellen zu diskutieren, insbesondere wenn es darum ging, komplexe verteilte Systeme mit mehreren Computern und unterschiedlichen Hardware- und Softwareplattformen bereitzustellen, auf denen sie betrieben werden können; Wir haben uns auf Daten geeinigt. Wir betrachten Daten als Mittel zum Verständnis des Systemzustands, als Mittel zur Darstellung von Videoframes und als Mittel zur Darstellung der Steuerungstheorie. Es war daher sinnvoll, unsere Entwicklungsumgebung und Systementwicklung datenzentriert anzugehen. Gepaart mit der kritischen Notwendigkeit, den Linkstatus als Teil der Teleoperation zu verstehen, wurden wir unweigerlich dazu gebracht, DDS (Data Distribution Service) zu bewerten. Die NASA war bereits ein starker Nutzer von DDS in ihren Weltraumkommunikationssystemen – aber könnte DDS auch die Teleoperation über eine so schwierige Verbindung ermöglichen und eine Echtzeitkontrolle über die tatsächlich schwierigste Verbindung ermöglichen? Das ist wissenschaftliches Neuland und deshalb umso spannender. Erste Anzeichen sind äußerst ermutigend.
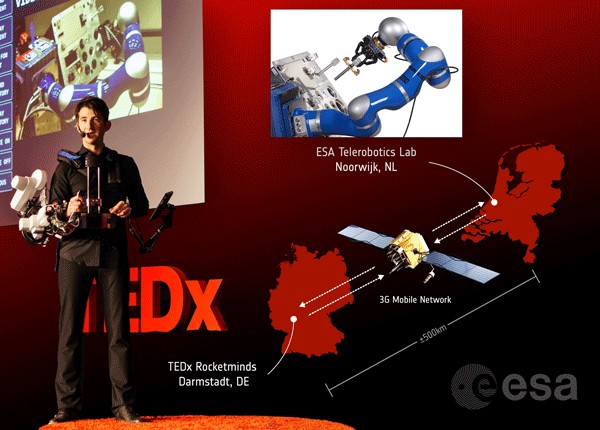
In dieser Live-Demonstration bei TEDx RheinMain RocketMinds, Mai 2014, habe ich unseren EXO-1-Exoskelettarm-Prototyp verwendet, um einen Roboterarm fernzusteuern, der sich physisch in unserer ESA-Telerobotics befand &Haptik-Labor über 500 km entfernt. Meine Aufgabe bestand darin, einen Metallstift aufzunehmen und in ein Loch mit einer Spalttoleranz von weniger als 0,5 mm zu stecken. Die gesamte Demo wurde über eine internetbasierte 2G-Telefon-WAN-Verbindung ausgeführt, da die geplante 3G-Verbindung unerwartet nicht verfügbar war! In dem geschlossenen Raum, vollgestopft mit Leuten mit Handys in der Tasche, war die Bandbreite stark eingeschränkt und wies tatsächlich die Art der Verbindung auf, die man im Weltraum erlebt – oder sogar noch viel schlimmer. Es kann nicht wirklich schlimmer kommen, wenn man über eine Verbindung teleoperiert, die Verzögerungen im Bereich von 15 Sekunden mit erheblichem Datenverlust aufwies. Dennoch schaffte es DDS, das über die 2G-Verbindung lief, die gesamte Kommunikation für das haptische Feedback, die Roboterarm-Steuerungsschleife und das Video des Roboterarms im Labor (sowohl auf ein Tablet auf meinem Arm gestreamt als auch lokal zur Anzeige auf dem TEDx-Hauptbildschirm).
Es ist zwar noch nicht im Weltraum, aber die präzise telerobotische Steuerung über große Entfernungen und herausfordernde Datenverbindungen mit Vision und haptischem Feedback ist buchstäblich in Reichweite und wir haben dies einem breiten Publikum demonstriert .
AKTUALISIERUNG :Das Haptics-1-Experiment wurde an Bord der Internationalen Raumstation vom NASA-Astronauten Barry Wilmore durchgeführt. Ein erster Vortest wurde am 30.12.2014 durchgeführt. Haptics-1 ist das erste robotergestützte Force-Feedback-Experiment im Weltraum. Herzliche Glückwünsche! Lesen Sie mehr
Zum ersten Mal wird #haptisches Feedback im Weltraum verwendet! Heute wird @Space_Station#haptics-1 erfolgreich durchgeführt! pic.twitter.com/30zD5GzGqs
— ESATelerobotics (@ESATelerobotics) 30. Dezember 2014
Wenn Sie eine Geschichte zur Verwendung von Connext DDS haben, die Sie teilen möchten, senden Sie uns eine E-Mail an blogadmin@rti.com.
Internet der Dinge-Technologie
- Die Zukunft des Live-TV
- Die Zukunft ist…Industrie 4.0
- Die Zukunft ist…Zusammenarbeit
- Edge Computing:Die Architektur der Zukunft
- Visualisierung der Zukunft der Anlagenwartung
- Robotik und die Zukunft von Produktion und Arbeit
- Die Zukunft der Rechenzentren
- Die Zukunft der Logistiktechnologie:Ein chinesisches Jahrhundert?
- Die Geschichte der Robotik in der Fertigung
- AutoStore:Wegbereiter der Zukunft der autonomen Lagerhaltung