


Abschlussprojekt Mechatronik
Das war mein Abschlussprojekt Mechatronik an der Fakultät für Maschinenbau in Skopje. Ziel war es, ein Gerät zu entwickeln, das die Interaktion realer Armbewegungen mit 3D-Computermodellen ermöglicht. Ich habe drei verschiedene Felder in einem Gerät integriert, z.B. Maschinenbau, Elektrotechnik und Informationstechnik:
Im nächsten Video sehen Sie eine Präsentation des Projekts. Dies ist sein Inhalt:
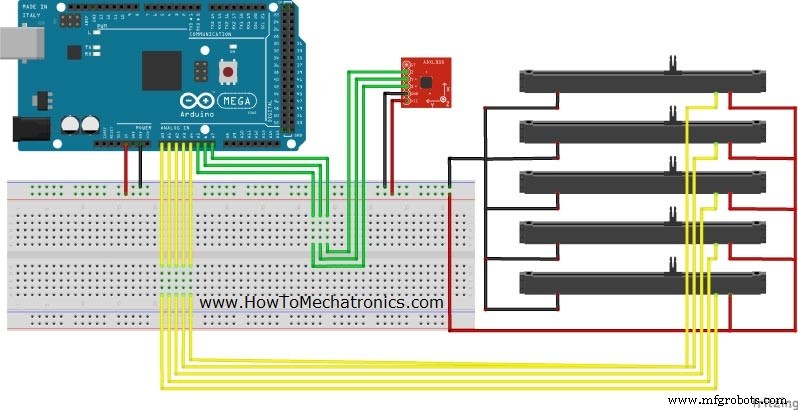
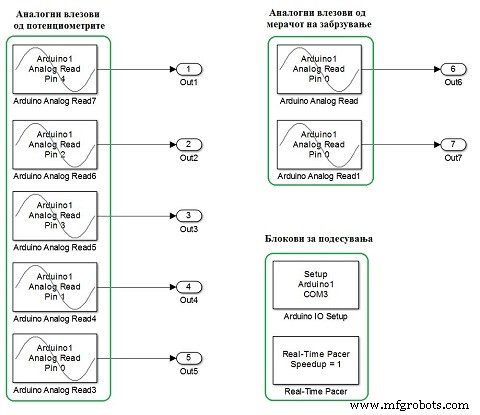
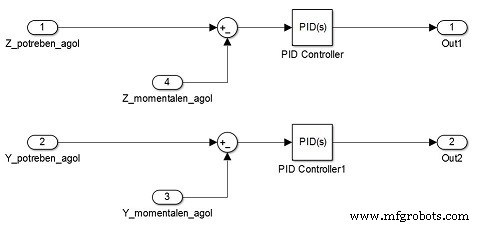
Der Beschleunigungsmesser wird verwendet, um die Ausrichtung des Arms zu verfolgen. Wenn sich der Arm bewegt, ändern sich die Werte der X-, Y- und Z-Achse des Beschleunigungsmessers und werden in die analogen Eingänge des Arduino-Boards eingelesen. Laut ihnen bewegt sich auch das 3D-Modell.
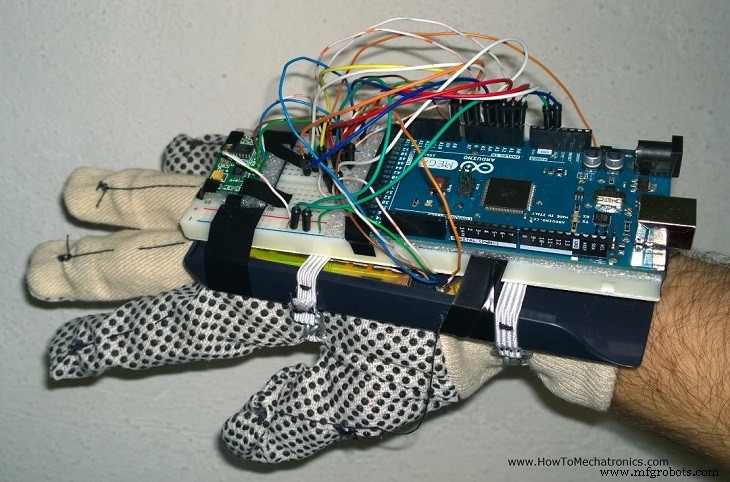
Die Potentiometer werden zum Verfolgen der Position der Finger verwendet. Ich habe an jedem Potentiometer eine Feder (Stiftfeder) angebracht. Die Feder hält den Potentiometer-Schieber an einer bestimmten Position und wenn sich die Finger bewegen, wird der Schieber gezogen und der Widerstand des Potentiometers ändert sich. Diese Werte werden in die analogen Eingänge des Arduino-Boards eingelesen und entsprechend bewegen sich auch die Finger des 3D-Modells.
Ich benutzte eine Plastikabdeckung von einem Taschenrechner als Basis, auf der ich die fünf Potentiometer befestigte. Darauf legte ich das Breadboard, auf dem ich das Arduino Board und den Accelerometer mit einem Klebeband befestigte. Auf dem Bild unten sehen Sie das endgültige Aussehen des Geräts.
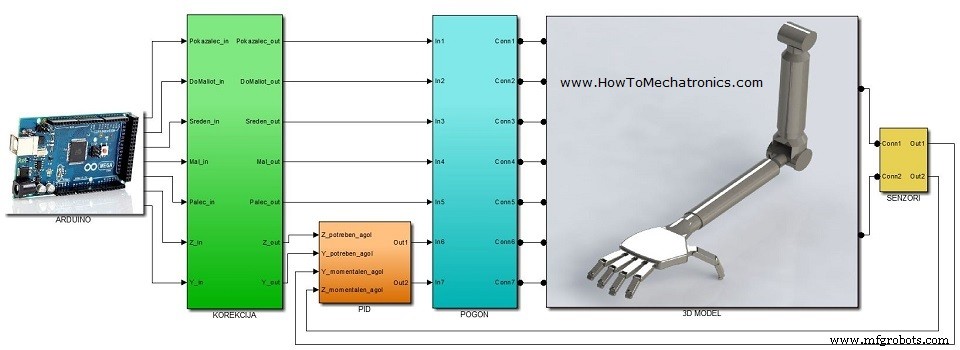
Das 3D-Modell ist eine Darstellung eines menschlichen Arms. Zuerst habe ich es mit Solidworks modelliert und dann mit dem SimMechanicsLink von Matworks nach Matlab/Simulink übertragen.
Vor dem Erstellen des Simulink-Modells musste ich zuerst das Arduino IO-Paket installieren, das aus der Simulink-Bibliothek für die Kommunikation mit dem Arduino-Board besteht. Auch mit der Arduino IDE musste ich den Code auf das Arduino-Board hochladen, das mit dem Paket geliefert wird, um die Simulink-Bibliothek zu aktivieren. Hier würde ich mein Tutorial für Matlab und Arduino IO Package sehr empfehlen, damit Sie das Funktionsprinzip verstehen und den Code sehen können.
Ich habe mein Simulink-Modell in sechs Subsysteme unterteilt:
Sie können das Simulink-Modell hier herunterladen:
Überprüfen Sie meine Erweiterung dieses Projekts.
Ich habe den Arduino Glove so umprogrammiert, dass er als Gamecontroller funktioniert.
Bauen des Geräts
In diesem Projekt verwendete Teile


Schaltplan des Gerätes
Das 3D-Modell

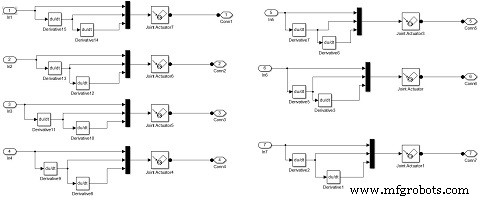
Das MATLAB / Simulink-Modell

Herstellungsprozess
- Sensorbasierte Projektideen für Ingenieurstudenten im Abschlussjahr
- Smart Pen:Endgültiges Projekt für ECE5725
- Erstellen von Monitor-Ambilight mit Arduino
- Arduino Pong-Spiel - OLED-Display
- Audiofrequenzdetektor
- Arduino Tamagotchi Klon - Digitales Haustier
- Wireless Lichtschalter-Manipulator
- Tech-TicTacToe
- Bewegungssensor-Wasserpistole
- Arduino-Countdown-Timer