


Automatische Sortiermaschine – Studentenprojekt Mechatronik
Diese Maschine wurde als Studentenprojekt für das Fach Konstruktion &CAD an der Fakultät für Maschinenbau in Skopje von einem Team von fünf Studenten erstellt.
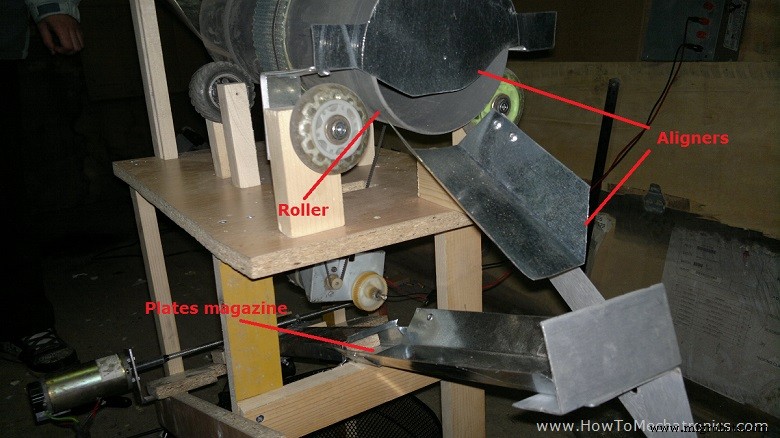
So funktioniert die Automatische Sortiermaschine:
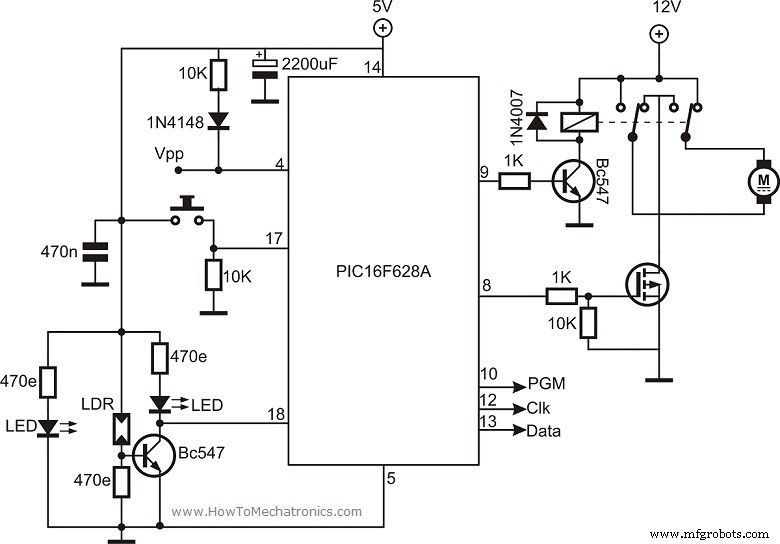
Die Maschine verwendet einen PIC16F628A-Mikrocontroller und wird mit MikroElektronika programmiert.
Es ist eine Maschine, die zwei Arten von Platten sortiert. Eine der Platten hat Löcher und die anderen nicht. Unsere Aufgabe war es, eine Maschine zu entwickeln, die diese Platten automatisch aussortiert. Wir haben diese Lösung herausgebracht, die sogar den ersten Platz unter 25 anderen Maschinen gewonnen hat.Wie es funktioniert

Schaltplan
Quellcode
/********************************************************************************/
/* Mechatronic Design Team */
/* Proekt po Konstruiranje i CAD */
/* "Dizajn i razvoj na nov ured za razdeluvanje na dva tipa plocki" */
/* */
/* */
/* */
/* Mikrokontroler: PIC16F628A */
/* Oscilator: Interen na 4MHz */
/* */
/* Dekemvri, 2012, Skopje */
/********************************************************************************/
void left () {
RB2_bit = 1; //motorot pocnuva da se dvizi na levo
delay_ms (500); // motorot se dvizi do krajna leva polozba
delay_ms (500);
delay_ms (500);
delay_ms (500);
PORTB = 0x00; //koga ke stigne do krajnata leva polozba se gasi
delay_ms (200); //vreme za kocenje na motorot
RB3_bit = 1; //se aktivira relejot za promena na nasokata
delay_ms (20);
RB2_bit = 1; //motorot pocnuva da se dvizi desno
delay_ms (500); //sredna pozicija na motorot
delay_ms (500);
delay_ms (500);
delay_ms (500);
PORTB = 0x00; //motorot se gasi koga ke dojde do sredina
delay_ms (150); //vreme za kocenje na motorot
}
//////////////////////////////////////////////////////////////////////////////
void right () {
RB3_bit = 1; //Se uklucuva relejot za promena na nasoka na motorot
delay_ms (30);
RB2_bit = 1; //motorot pocnuva da se dvizi desno
delay_ms (500);
delay_ms (500);
delay_ms (500);
delay_ms (500); //motorot se dvizi do krajna desna polozba
PORTB = 0x00; //koga ke stigne do krajna desna polozba se gasi
delay_ms (200); //vreme za kocenje na motorot
RB2_bit = 1; //motorot pocnuva da se dvizi levo
delay_ms (500); //sredna pozicija na motorot
delay_ms (500);
delay_ms (500);
delay_ms (500); //sredna pozicija na motorot
PORTB = 0x00; //motorot se gasi koga ke dojde do sredina
delay_ms (150); //vreme za kocenje na motorot
}
//////////////////////////////////////////////////////////////////////////////
void main() { //pocetok na glavna programa
TRISB = 0x00; //PORTB Izlezi
TRISA = 0xff; //PORTA Vlezovi
CMCON = 0x07; //gasenje na komparatori
do {
delay_ms (50);
PORTB = 0x00;
if (PORTA.b0==1) { //dali ima kocka?
delay_ms (100);
if (PORTA.b1==0) { //dali ima otvor?
left (); } //ako ima otvor dvizi se levo
else (right ()); }} //ako nema dvizi se desno
while (1); }Code language: Arduino (arduino)
Herstellungsprozess
- EEG-Maschine
- Automaten
- Abstimmungsgerät
- Nähmaschine
- Projektideen für Ihre Mini-CNC-Maschine
- Automatische Bohr- und Gewindeschneidmaschine - Ein Überblick
- Was ist eine automatische Pressmaschine?
- Automatische Nahtschweißmaschine – Nahtschweißprozess
- Eine Einführung in die automatische Rohrbiegemaschine
- JW-Maschine