


Minimierung von Schrittmotorgeräuschen und -vibrationen in Präzisions-Bewegungssteuerungsanwendungen
Schrittmotoren funktionieren in einer Vielzahl von Anwendungen gut, können jedoch mit Drehmomentwelligkeit und Stromverzerrungsproblemen zu kämpfen haben. Erfahren Sie mehr über QuietStep, einen proprietären Algorithmus von Allegro MicroSystems, als mögliche Lösung.
Schrittmotoren bieten in vielen Anwendungen einzigartige Vorteile gegenüber Gleichstrommotoren (DC) und bürstenlosen Gleichstrommotoren (BLDC). Ein bipolarer Schrittmotor liefert eine genaue Position im offenen Regelkreis sowie ein Drehmoment bei Nulldrehzahl, ohne einen Regelkreis oder externe Sensoren zu verwenden. Mit ihren kontrollierten Schrittfunktionen eignen sich Schrittmotoren gut in einer Vielzahl von Präzisions-Bewegungssteuerungsanwendungen, einschließlich Closed-Circuit-TVs (CCTV), 3D-Druckern, computergestützter numerischer Steuerung (CNC), Textilherstellungsanlagen und Bestückungsmaschinen.
Der erfolgreiche Einsatz von Schrittmotoren erfordert ein effektives Management von Geräuschen und Vibrationen. Bei CCTV-Anwendungen beispielsweise werden Vibrationen direkt auf den Bildsensor und den Gimbal übertragen. Ein großer Zoom in Kombination mit Bewegung kann das Bild verzerren. Beim 3D-Druck kann eine Motorresonanz oder ein Überschwingen durch hohe Drehmomentwelligkeit zu vielen unerwünschten Druckartefakten führen. In den meisten Fällen führt die Reduzierung der Motorvibrationen zu einer besseren Bildqualität oder einem präziseren 3D-Druck. Die Reduzierung der Motorvibrationen ermöglicht auch einen ruhigeren Gesamtbetrieb.
Es sind jetzt fortschrittliche Technologien verfügbar, die auf proprietären Algorithmen basieren, um Geräusche und Vibrationen in Schrittmotordesigns zu minimieren, indem Drehmomentwelligkeit und Stromverzerrung reduziert werden. Bevor Sie sich mit diesen Bewegungssteuerungslösungen befassen, ist es hilfreich zu verstehen, was Vibrationen und damit hörbare Geräusche verursacht. Schauen wir uns zunächst die Funktionsweise eines Schrittmotors genauer an.
Stepper-Grundlagen
Ein bipolarer Schrittmotor ist ein Gleichstrommotor mit diskreten Polpositionen, der aus mehreren Spulen besteht, die in zwei Gruppen angeordnet sind, die als Phasen bezeichnet werden. Das Stromverhältnis zwischen den beiden Phasen bestimmt, wie der Rotor zwischen den beiden Wicklungen positioniert ist. Auf diese Weise kann ein Schrittmotor seine Position zwischen zwei Polen in kleinere Inkremente, sogenannte Mikroschritte, aufteilen.
Der Strom in jeder Schrittmotorwicklung kann summiert werden, um einen Vektor zu erzeugen, wobei die Größe des Vektors das Drehmoment ist. Indem wir den Strom in jeder der beiden Phasen im Polarraum untersuchen, können wir uns den Vektor vorstellen, wie er sich durch jeden elektrischen Zyklus dreht.
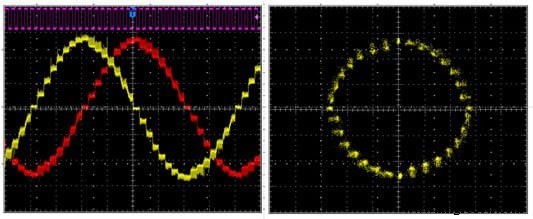
Abbildung 1. Phasenstrom in jeder von zwei Wicklungen eines bipolaren Schrittmotors im 1/8-Schritt (links). Phasenstrom in jeder von zwei Wicklungen eines bipolaren Steppers im 1/8-Schritt, aber im Polarbereich dargestellt (rechts).
Im zeitbasierten Bereich (Abbildung 1 links) wird das Drehmoment als Summe der Flächen unter den beiden Kurven definiert. Im Polarbereich (Abbildung 1 rechts) ist die Größe des Vektors das Drehmoment. In diesen Bildern können wir sehen, dass das Drehmoment konstant ist, während sich das Feld durch jeden elektrischen Zyklus bewegt. Wenn das Drehmoment nicht konstant ist, erfährt das System Vibrationen und hörbare Geräusche.
Angenommen, der Motor arbeitet nicht in Resonanz, wird die Drehmomentwelligkeit die größte Quelle für hörbare Geräusche und Vibrationen in einem Schrittmotor.
Steuerung eines Schrittmotors (Stromsteuerung)
Die Stromsteuerung mit Pulsweitenmodulation (PWM) ist die gebräuchlichste Art, einen Stepper anzutreiben. Durch die Implementierung der Stromsteuerung zerhackt die PWM-Steuerung den Ausgang und begrenzt den Strom in jeder Wicklung, um ein Verhältnis aufrechtzuerhalten, das die Rotorposition definiert.
Die Natur der PWM-Stromsteuerung führt zu einer Stromwelligkeit basierend auf dem angelegten Tastverhältnis, der Induktivität des Motors und der Spannung daran. Um die Welligkeit zu minimieren, kann der Controller steuern, wie der Strom in den Wicklungen abnimmt, indem er verschiedene Abklingmodi implementiert.
Sehen wir uns die üblichen Abklingmodi für einen einzelnen PWM-Zyklus an, beginnend mit dem Anstieg des Antriebsstroms.
Nach der Ansteuerung, die in 2A gezeigt ist, wird der Abklingmodus während der PWM-Auszeit durch zwei synchrone Verfahren implementiert, die in 2B und 2C gezeigt sind.
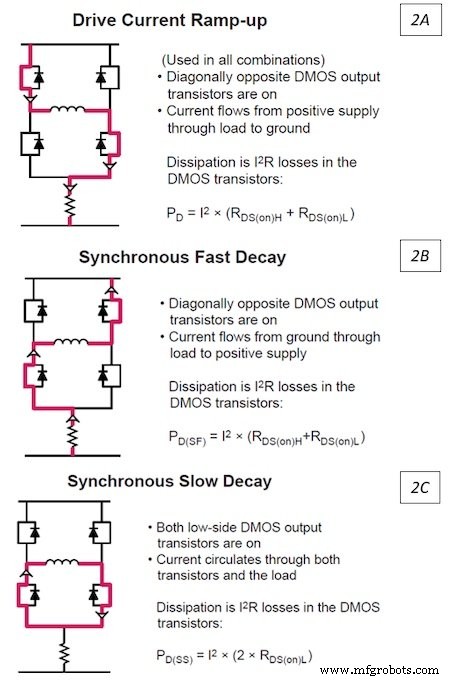
Abbildung 2. Aktueller Pfad in Vollbrücke mit Drive- und Decay-Modi.
Ein schneller Abfall bietet eine optimale Stromsteuerung, führt jedoch zu einer hohen Welligkeit. Ein langsames Abklingen führt zu einer geringen Welligkeit, aber die Abklingrate hängt von der Gegenelektromotorischen Kraft (BEMF) des Motors ab, die in einigen Fällen zu Stromverzerrungen führen kann.
Abbildung 3A zeigt, was passieren kann, wenn 100 Prozent langsamer Zerfall verwendet wird. Wenn der Wicklungsstrom fällt, kann ein langsamer Abfall den Strom nicht schnell genug verringern, was zu Verzerrungen an der fallenden Flanke führt. Abbildung 3B zeigt die Auswirkungen der Verwendung von 100 Prozent Fast Decay. Der Welligkeitsstrom ist viel größer, aber der Controller behält die genaue Kontrolle des Stroms bei.
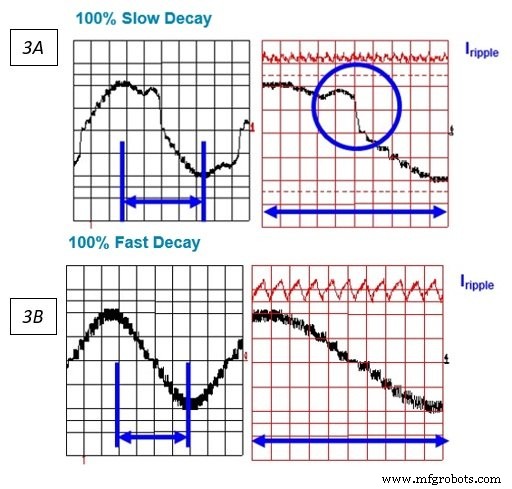
Abbildung 3A. Ein langsamer Abfall kann zu Verzerrungen führen, wenn der Strom in der Last abnimmt.
Abbildung 3B. Ein schnelles Abklingen verursacht einen großen Welligkeitsstrom, der zu Vibrationen und hörbaren Geräuschen führen kann.
Wir können die in Abbildung 1 gezeigten Effekte vermeiden und durch einen Kompromiss auch einen angemessenen Welligkeitsstrom beibehalten. Wenn der Strom in der Last abnimmt, implementiert der Treiber eine Kombination aus schnellem und langsamem Decay, bekannt als Mixed Decay. Die Ausschaltzeit wird in einen Abschnitt mit schnellem Abfall und einen Abschnitt mit langsamem Abfall unterteilt, wie in Abbildung 4 gezeigt. Wenn der Strom in der Last ansteigt, minimiert der langsame Abfall die Welligkeit.
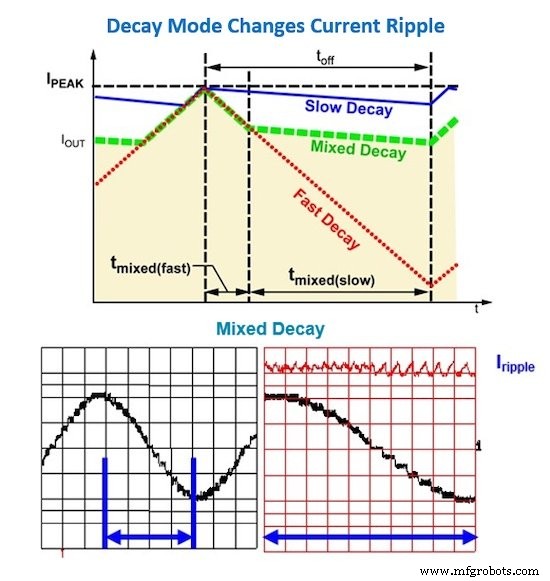
Abbildung 4. Mixed Decay minimiert die Welligkeit und behält gleichzeitig die Kontrolle über den Strom in der Wicklung.
Abhängig von den Eigenschaften eines Schrittmotors und seiner LR-Zeitkonstante kann ein langsames Abfallen an der steigenden Flanke bei niedrigen Strömen zu Problemen führen, bei denen die Stromänderungsrate zu schnell ist, als dass der PWM-Controller aufgrund der Austastung des Strommessverstärkers auf niedrige Ströme regeln kann. Dieses Szenario kann zu Stromverzerrungen führen, wenn der Strom in der Last ansteigt, wie in Abbildung 5 gezeigt.
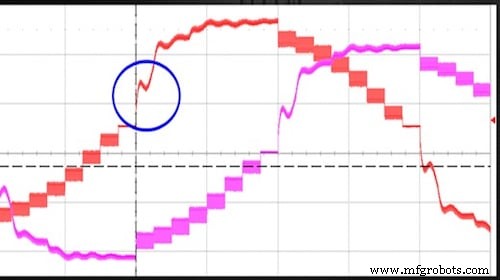
Abbildung 5. Ein langsames Abklingen an der steigenden Flanke kann bei Motoren mit bestimmten LR-Eigenschaften zu Verzerrungen führen.
Es ist schwierig, einen einfachen Kompromiss zu finden, der für alle bipolaren Schrittmotoren funktioniert. Um diese Probleme zu lösen und gleichzeitig die geringstmögliche Welligkeit beizubehalten, muss sich das System an unterschiedliche Motoreigenschaften anpassen.
Ein neuer Ansatz zur Reduzierung der Drehmomentwelligkeit
Allegro hat eine Möglichkeit zur Reduzierung von Drehmomentwelligkeit und Stromverzerrung für Schrittmotoranwendungen eingeführt. Diese Innovation namens QuietStep ist jetzt als Option für den neuesten Schrittmotortreiber A5984 von Allegro erhältlich.
Die QuietStep-Technologie verwendet einen proprietären Algorithmus, der den Prozentsatz des schnellen Abklingens, der von Zyklus zu Zyklus benötigt wird, dynamisch (nach oben oder unten) anpasst, um die bestmögliche Leistung unter allen Betriebsbedingungen ohne Verwendung komplexer Software zu erzielen.
Der Algorithmus kehrt den traditionellen Ansatz für gemischtes Abklingen um, indem zuerst langsames Abklingen und dann schnelles Abklingen implementiert werden. Fig. 6A zeigt den traditionellen gemischten Abklingvorgang mit dem festen Anteil des schnellen und langsamen Abklingens und mit dem schnellen Abklingen, der den PWM-Aus-Zeit-Zyklus startet. Abbildung 6B zeigt, wie das langsame Abklingen beginnt, wenn QuietStep zu Beginn des PWM-Auszeitzyklus verwendet wird. QuietStep passt das Verhältnis von schnellem und langsamem Abfall automatisch an, um die Stromwelligkeit zu minimieren und gleichzeitig eine genaue Stromregelung beizubehalten.
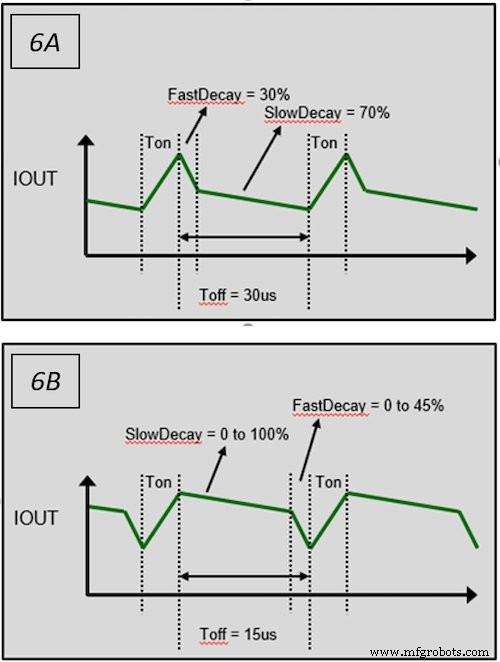
Abbildung 6A. Traditioneller gemischter Decay, bei dem das Verhältnis von schnellem und langsamem Decay festgelegt ist.
Abbildung 6B. QuietStep kann das Verhältnis von schnellem und langsamem Abfall dynamisch anpassen, um die Stromkontrolle beizubehalten und die Stromwelligkeit zu minimieren.
Ein schneller Abfall wird nur eingeführt, wenn dies für die Stromregelung erforderlich ist, was zu einem geringstmöglichen Welligkeitsstrom führt. Abbildung 7 zeigt den hohen Welligkeitsstrom, der sich aus einem festen gemischten Abfall mit abnehmendem Strom und einem Verlust der Stromsteuerung bei einem langsamen Abfall mit zunehmendem Strom ergibt. Die QuietStep-Technologie eliminiert diese Effekte, indem sie den Welligkeitsstrom im Vergleich zu gemischtem Decay halbiert. Wenn der Strom ansteigt, hält QuietStep die Stromregelung bis auf null Ampere aufrecht.
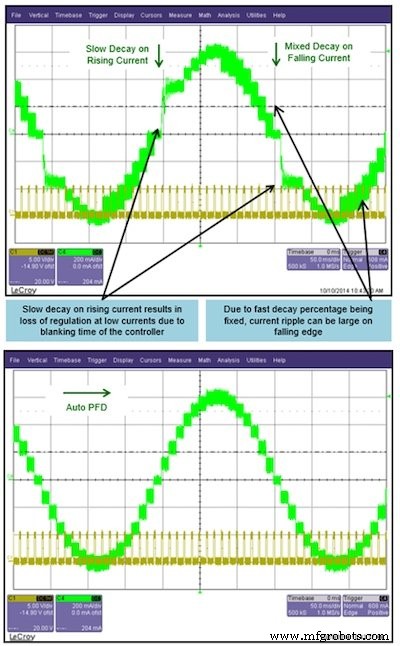
Abbildung 7. Herkömmlicher langsamer Abfall mit zunehmendem Strom und gemischter Abfall für abnehmenden Strom führt zu einem Verlust der Regelung beim Anstieg mit zunehmendem Strom und einer großen Welligkeit bei abnehmendem Strom. QuietStep bietet eine hervorragende Stromregelung mit steigendem Strom bei gleichzeitig niedriger Stromwelligkeit während des gesamten elektrischen Zyklus.
Die Reduzierung von Stromwelligkeit und -resonanz auf Systemebene minimiert Vibrationen sowie hörbare Geräusche, die durch Vibrationen verursacht werden. Das Ergebnis ist eine bessere Videoabbildung in CCTV-Systemen und eine überlegene Druckqualität in 3D-Druckern.
Die Reduzierung hörbarer Geräusche und Vibrationen verbessert nahezu jede Motorsteuerungsanwendung, von Türschlössern für die Hausautomation und Ventilsteuerung bis hin zu Präzisions-Bildverarbeitungssystemen und 3D-Druck. Die QuietStep-Technologie von Allegro macht es überflüssig, die Geräusch- und Vibrationsquelle in einem System zu ermitteln. QuietStep ist vollständig in den IC integriert, einfach zu implementieren, erfordert keine Programmierung oder externe Komponenten und ist vollständig automatisch.
Einsatz von QuietStep mit bipolaren Schrittmotortreibern
Mit Mikroschrittmotortreibern, die diese fortschrittliche Technologie ermöglichen, wie dem Allegro A5984, werden Stromwellenformen automatisch über einen weiten Bereich von Schrittmotorgeschwindigkeiten und -eigenschaften optimiert. Schrittmotortreiberlösungen, die mit der QuietStep-Technologie ausgestattet sind, passen die Menge des schnellen Abfalls während eines PWM-Zyklus im laufenden Betrieb an, um die Stromwelligkeit unter verschiedenen Betriebsbedingungen zu minimieren.
Die QuietStep-Funktion verbessert die Systemleistung, was zu weniger hörbaren Motorgeräuschen, geringeren Vibrationen und erhöhter Schrittgenauigkeit führt. Unter Verwendung dieser Technologie ist der A5984-Treiber für den Betrieb von bipolaren Schrittmotoren von Vollschritt- bis zu 1/32-Schritt-Modi ausgelegt und ermöglicht eine Ausgangstreiberkapazität von bis zu 40 V und ±2 A. Insgesamt ermöglicht der QuietStep-Algorithmus ein einfacheres System Konzeption, Umsetzung und Betrieb.
Um mehr über den A5984-Treiber und die QuietStep-Technologie zu erfahren, besuchen Sie die A5984-Produktseite.
Allegro MicroSystems ist ein weltweit führender Anbieter von Stromversorgungs- und Sensorlösungen für Bewegungssteuerung und energieeffiziente Systeme. Weitere Informationen finden Sie auf der Allegro MicroSystems-Website.
Branchenartikel sind eine Inhaltsform, die es Branchenpartnern ermöglicht, nützliche Nachrichten, Nachrichten und Technologien mit All About Circuits-Lesern auf eine Weise zu teilen, für die redaktionelle Inhalte nicht gut geeignet sind. Alle Branchenartikel unterliegen strengen redaktionellen Richtlinien, um den Lesern nützliche Neuigkeiten, technisches Know-how oder Geschichten zu bieten. Die in Branchenartikeln zum Ausdruck gebrachten Standpunkte und Meinungen sind die des Partners und nicht unbedingt die von All About Circuits oder seinen Autoren.
Industrieroboter
- Freigabe- und Interlock-Schaltungen
- Schrittmotoren
- Renesas erweitert RX24T- und RX24U-MCU-Reihe für Motorsteuerungsanwendungen
- Nanotec:kompakte Motorsteuerung für bürstenlose Gleichstrommotoren und Schrittmotoren
- Anwendungen und Einschränkungen des genetischen Algorithmus
- Wie WIG-Roboterschweißen Präzision und Qualitätskontrolle in Ihre Produktion bringt
- IQ Motion Control bringt eine neue Reihe von Servomotoren auf den Markt
- Die Grauzone zwischen Servo- und Schrittmotoren
- Safety-Integrated Motion Control ermöglicht die Koexistenz von Sicherheit und Produktivität
- Anschlüsse für die Steuerung:Kommunikationsschnittstellen für Positions- und Bewegungssensoren