


Was ist ein Robotermanipulator? Ein Leitfaden
Die Teile eines Roboters spielen alle eine Rolle bei seinem Betrieb und bestimmen die Art der Aufgaben, für die er verwendet werden kann. Daher wäre ein tiefes Verständnis dieser Teile der erste Schritt zur Auswahl des richtigen Industrieroboters für Ihre Bedürfnisse. Obwohl viele Aspekte zu berücksichtigen sind, wäre es vielleicht von Vorteil, mit einem der wichtigsten zu beginnen; ein Robotermanipulator.
Ein Roboter ist eine Maschine, die so programmiert ist, dass sie bestimmte Aufgaben automatisch und vorhersehbar ausführt. Dazu muss es mit Objekten umgehen und sie entweder bewegen oder durch Aktionen wie Schweißen oder Bohren auf sie treffen. Es ist diese Handhabung oder Prozeduren, die an Objekten durchgeführt werden, die als Robotermanipulation bezeichnet werden. Diese Definition gibt uns somit den Kontext, um Robotermanipulatoren zu definieren.
Ein Robotermanipulator ist eine armähnliche Struktur, die mit dem Körper eines Roboters verbunden ist und zur Ausführung von Aufgaben verwendet wird. Ein Roboter ohne Manipulator wäre das Äquivalent einer Person, die eine Aufgabe mit auf dem Rücken gefesselten Händen ausführt, es ist einfach nicht praktikabel. Aus diesem Grund werden Robotermanipulatoren auch als Roboterarme bezeichnet. Quelle:Kawasaki
Robotermanipulatoren bestehen aus einer Reihe von Gelenken und Gliedern, die in ihrer inneren Struktur verschmolzen sind. Von außen der Roboter-Manipulatorarm scheint nur am Roboter montiert zu sein. Die Reihe von Gelenken und Verbindungen gehen jedoch weiter in den Roboterkörper hinein, um sie zu binden. Dadurch wird sichergestellt, dass der Roboter und der Manipulator in koordinierten Flüssigkeitsbewegungen zusammenarbeiten.
Links sind starre Komponenten, die verschiedene Teile eines Roboters zusammenführen. Ihre Steifigkeit sorgt zwar für eine feste Struktur, würde es den Roboterteilen jedoch erschweren, sich während der Aufgaben zu bewegen. Als Ergebnis werden den Verbindungen Gelenke hinzugefügt, um die Flexibilität zu erleichtern. Gelenke sind bewegliche Komponenten, die gegeneinander gleiten, um eine lineare, rotierende oder revolutionäre Bewegung von Roboterteilen zu ermöglichen. Sie sind gebaut und funktionieren genauso wie ein menschlicher Ellbogen oder ein Knie. Quelle:www. brainkart.com
Die Art und Anzahl der Gelenke eines Robotermanipulators bestimmen seine Freiheitsgrade, die Form seines Arbeitsbereichs und seine Anwendung. Dies wiederum bestimmt, wie ein Roboter kategorisiert wird. Lassen Sie uns zur Veranschaulichung verschiedene Arten von Robotern und die Strukturen ihrer Robotermanipulatoren untersuchen.
Kartesischer Roboter- seine Manipulatoren sind über 3 senkrecht zueinander stehende Prismengelenke verbunden und ermöglichen nur lineare Gleitbewegungen. Als Ergebnis wird ein kartesischer Roboter als 3-Achs-Roboter klassifiziert und hat einen geometrischen Arbeitsraum.
Polar-Roboter- Arm und Körper eines Polarroboters werden über ein Drehgelenk verbunden. Diese Art von Gelenk ermöglicht kreisförmige Bewegungen, die es dem polaren Roboterarm ermöglichen, sich innerhalb von 3 Achsen in einem polaren Geometriesystem zu bewegen.
Zylindischer Roboter- Ein zylindrischer Roboterarm arbeitet mit einem Drehgelenk an der Basis und einem Lineargelenk, das es ihm ermöglicht, sich entlang der vertikalen Achse zu bewegen. Die Einrichtung dieser Gelenke ermöglicht es dem Manipulator, sich auszudehnen und einzufahren, aber sein Arbeitsbereich ist immer noch ziemlich auf eine kleine zylindrische Form beschränkt.
SCARA-Roboter – Die Gelenke eines SCARA-Roboters sind rotatorisch und ermöglichen seine Bewegungen entlang der XY-Achsen, während sie in der Z-Achse starr bleiben. Da es sich bei den Gelenken um eine horizontale Ebene handelt, haben SCARA-Roboter breite Arbeitsräume in einer halbkreisförmigen Form.
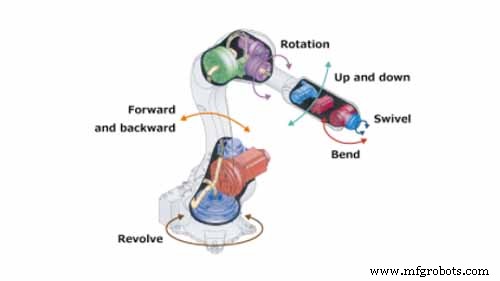
Gelenkroboter – ein Knickarmroboter hat unter allen anderen Robotern die flexibelsten Manipulatoren. Der Roboterarm ist über ein Drehgelenk mit dem Roboterkörper verbunden, während der Ellbogen und andere Teile des Arms über Drehgelenke verbunden sind. Die Drehgelenke ermöglichen es dem Arm, zu rollen, zu neigen und zu gieren, wodurch ein 6-Achsen-Roboter entsteht.
Die Flexibilität verschiedener Robotermanipulatoren kann genutzt werden, um Prozesse in verschiedenen Branchen zu automatisieren. Beispiele für eine solche Anwendung sind:
Roboterchirurgie- In dieser Anwendung wird ein gelenkiger Robotermanipulator mit chirurgischen Instrumenten als Endeffektoren ausgestattet. Es wird von einem Chirurgen ferngesteuert, um chirurgische Manöver auszuführen.
Auswählen und platzieren – Dies ist eine gängige industrielle Anwendung, bei der Robotermanipulatoren für sich wiederholende Pick-and-Place-Aufgaben wie das Verpacken von Waren verwendet werden.
PCB-Montage – In diesem Fall ersetzt ein Robotermanipulator die Hände eines menschlichen Arbeiters, um Mikroteile mit hoher Präzision und Geschwindigkeit auf einer Leiterplatte zu montieren.
Man kann mit Sicherheit sagen, dass die Bedeutung des Robotermanipulators in der Robotik über die reine Funktion hinausgeht. Es geht weiter, um die Struktur zu definieren und wie ein Roboter eingesetzt werden kann. Qualitätsmanipulatoren eines renommierten Roboterarmherstellers wäre daher eine lohnende Investition für jeden, der sich in die Robotik wagt.
Inhaltsverzeichnis
Was ist Robotermanipulation?

Aus was bestehen Robotermanipulatoren?
Roboter-Manipulatoren in verschiedenen Robotern

Anwendungen von Robotermanipulatoren
Schlussfolgerung
Industrieroboter
- Welche Branchen und Unternehmen Roboter einsetzen
- Industrieroboter – Der ultimative Leitfaden
- Was ist Robotic Process Automation und ihre Vorteile
- Der ultimative Leitfaden zum Roboterschweißen in der Fertigung
- Roboterarm:Wie wird er hergestellt?
- Robotik in der Automobilherstellung
- Robot Warehouse System:Was es ist und wie es verwendet wird
- M2M oder Machine-to-Machine-Kommunikation, was ist das?
- Thermografie, was sie ist und wofür sie verwendet wird
- Industrie 4.0, was steckt dahinter?