


Cobots 2026:Wie kollaborative Roboter funktionieren und warum sie wichtig sind

Von der EVST-Redaktion · Letzte Aktualisierung:10. Juni 2026
Ein kollaborativer Roboter oder Cobot ist ein leichter Industriearm, der so konstruiert ist, dass er neben Menschen arbeitet, ohne dass ein Sicherheitszaun erforderlich ist. Dies wird durch Kraft- und Kraftbegrenzung erreicht:Drehmomentsensoren in jedem Gelenk erkennen den Kontakt und stoppen oder ziehen den Arm sofort ein, bevor eine Kollision zu Verletzungen führen kann. ISO/TS 15066 beschreibt vier Kollaborationsmodi, die die zulässige Nähe zwischen einem Menschen und einem Roboter definieren. Im Jahr 2026 liegen die Nutzlasten von Cobots typischerweise zwischen 3 kg und 30 kg, mit Reichweiten von etwa 600 mm bis 1.800 mm.
Was einen Cobot von einem herkömmlichen Roboter unterscheidet
Der Begriff „kollaborativ“ bezieht sich auf die Sicherheitsfähigkeit und nicht auf eine bestimmte mechanische Klasse. Ein Cobot bleibt ein 6-Achsen-Gelenkarm, der an jedem Gelenk mit Servomotoren, Getrieben und Encodern ausgestattet ist. Was ihn auszeichnet, ist die zusätzliche Sensorik und Steuerung, die eine sichere gemeinsame Nutzung eines Arbeitsbereichs ermöglicht, kombiniert mit einem Design, das das Verletzungsrisiko minimiert:abgerundete Kanten, geringe bewegte Masse, keine Quetschstellen und Geschwindigkeitsbegrenzungen.
Herkömmliche Industrieroboter sind auf Geschwindigkeit, Nutzlast und Wiederholgenauigkeit in einer geschützten Zelle ausgelegt, sofern sich kein Mensch im Arbeitsraum aufhält. Cobots tauschen Höchstgeschwindigkeit und Nutzlast gegen die Fähigkeit, in einem gemeinsamen Raum zu operieren, was wiederum die Wirtschaftlichkeit des Einsatzes verändert:Eine Cobot-Zelle kann auf Zäune, Lichtvorhänge und den Platz über dem Kopf verzichten, den eine umzäunte Zelle erfordert. Diese Kosteneinsparung ist ein entscheidender Vorteil für kleine und mittlere Hersteller. Einen strukturierten Überblick über die Cobot-Typen und Auswahlkriterien finden Sie in unserem vollständigen Leitfaden zu Cobot-Typen, -Auswahl und -Anwendungen, der diesen Artikel durch einen tieferen Einblick in die Sicherheitsmechanismen ergänzt.
Laut dem Bericht „World Robotics 2025“ der International Federation of Robotics bleiben kollaborative Roboter gemessen an der Stückzahlwachstumsrate das am schnellsten wachsende Segment des Marktes für Industrieroboter, auch wenn sie immer noch eine Minderheit der Gesamtinstallationen ausmachen. Das Wachstum konzentriert sich auf die Elektronikmontage, Maschinenwartung und Verpackung – Bereiche, in denen das Teilegewicht gering ist und die Nähe zwischen Mensch und Roboter für den Betrieb von Nutzen ist.
Wie ein Cobot funktioniert:Die Sicherheitsmechanik
Die Kerntechnologie, die Cobots ermöglicht, besteht darin, wie sie Kontaktkräfte erkennen und begrenzen. Im Jahr 2026 dominieren drei Ansätze, und die meisten Produktions-Cobots kombinieren mehr als einen.
Gelenkdrehmomenterkennung
Jedes Gelenk enthält einen Drehmomentsensor – oder die Steuerung leitet das Drehmoment aus dem Motorstrom ab. Während der normalen Bewegung kennt die Steuerung das erwartete Drehmomentprofil für den programmierten Weg bei der programmierten Geschwindigkeit. Wenn das gemessene Drehmoment einen Schwellenwert überschreitet, interpretiert die Steuerung dies als unerwartete äußere Kraft, löst einen Schutzstopp aus und bringt den Arm in eine sichere Position. Die Reaktionszeit vom Kontakt bis zum Stopp liegt in der Größenordnung von Millisekunden, wodurch die Kontaktkraft unter der Verletzungsschwelle bleibt.
Power-and-Force-Limiting (PFL)
PFL ist die gebräuchlichste kollaborative Methode. Der Roboter ist so konstruiert und konfiguriert, dass selbst bei einem Worst-Case-Kontakt die übertragene Kraft und der Druck unter den biomechanischen Grenzwerten bleiben, die in ISO/TS 15066 AnnexA für die relevante Körperregion definiert sind. Dies wird durch geringe bewegte Massen, Geschwindigkeitsbegrenzungen, abgerundete Geometrie und den oben beschriebenen drehmomentempfindlichen Anschlag erreicht. PFL ermöglicht den Betrieb vieler Cobots ohne Zäune oder Lichtvorhänge, da der Roboter selbst als Sicherheitssystem fungiert.
Geschwindigkeits- und Abstandsüberwachung
Alternativ oder ergänzend erfassen externe Sicherheitssensoren – wie Laserscanner, 3D-Kameras oder Schaltmatten – die Position des Bedieners. Der Roboter läuft mit voller Geschwindigkeit, wenn niemand in der Nähe ist, verlangsamt die Geschwindigkeit, wenn sich eine Person nähert, und stoppt, wenn der Schutzabstand überschritten wird. Dadurch kann ein schnellerer und schwererer Roboter kollaborativ agieren, ohne die Produktivitätsgeschwindigkeit zu beeinträchtigen, wenn der Arbeitsbereich frei ist.
In der Praxis kombinieren die saubersten Bereitstellungen folgende Methoden:PFL als Basissicherheit mit zusätzlicher Geschwindigkeits- und Abstandsüberwachung, um den Durchsatz wiederherzustellen, wenn kein Bediener anwesend ist. Branchenbeobachtungen bei Einsätzen am Fließband zeigen, dass ein Cobot, der ausschließlich für die Worst-Case-PFL-Geschwindigkeit konfiguriert ist, 40 % bis 60 % seines potenziellen Durchsatzes verlieren kann, verglichen mit dem gleichen Arm, der schnell laufen kann, wenn der Arbeitsbereich frei ist – daher sind Hybridkonfigurationen heute bei Linien mit höherem Volumen die Standardeinstellung.
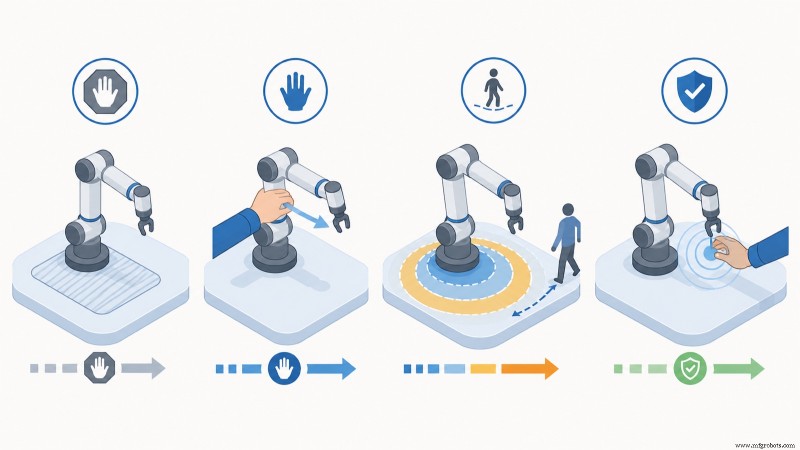
Die vier Zusammenarbeitsmodi unter ISO/TS 15066
ISO/TS 15066:2016 ergänzt ISO10218 für den kollaborativen Betrieb und definiert vier verschiedene Methoden der Zusammenarbeit. Eine einzelne Anwendung kann eine davon verwenden oder mehrere kombinieren. Zu verstehen, welchen Modus eine Anwendung benötigt, ist der erste Schritt bei der Spezifikation einer sicheren Cobot-Zelle.
| Kollaborationsmodus | Wie es funktioniert | Mensch-Roboter-Interaktion | Typische Anwendung |
|---|---|---|---|
| Sicherheitsbewerteter überwachter Stopp | Roboter stoppt, wenn eine Person den gemeinsamen Raum betritt; wird fortgesetzt, wenn sie gehen | Keine Bewegung, während sich ein Mensch in der kollaborativen Zone befindet | Manuelles Be-/Entladen einer Roboterzelle, gelegentliche Aufgaben im gemeinsam genutzten Raum |
| Handführung | Der Bediener bewegt den Arm physisch mithilfe eines Handführungsgeräts. Roboter hält sich an die ausgeübte Kraft | Direkte physische Führung, vom Bediener gesteuerte Roboterbewegung | Lehrpfade, unterstütztes Heben, Positionierung kleiner Teile |
| Geschwindigkeits- und Abstandsüberwachung | Die Robotergeschwindigkeit skaliert mit der Entfernung des Bedieners, gemessen durch Sicherheitssensoren | Koexistenz mit dynamischer Geschwindigkeitsreduzierung, Vollstopp bei Mindestabstand | Gemischte Zellen, in denen Menschen und Roboter abwechselnd in der Nähe arbeiten |
| Leistung und Kraftbegrenzung | Kontaktkraft und -druck werden durch Design und Steuerung unter biomechanischen Grenzen gehalten | Direkter Kontakt erlaubt; Roboter stoppt bei unerwarteter Kraft | Gemeinsame Aufgabenmontage, Maschinenpflege, Verpackung neben den Bedienern |
ISO/TS 15066 organisiert biomechanische Grenzwerte nach Körperregion:Die Grenzwerte für Gesicht und Schädel sind weitaus strenger als für den Oberarm oder die Hand und spiegeln die Schwere möglicher Verletzungen wider. Eine korrekte Risikobewertung ordnet die Teile der Roboterbahn, an denen ein Kontakt möglich ist, den Körperregionen zu, die kontaktiert werden könnten, und stellt dann sicher, dass Kraft und Druck unter den relevanten Grenzwerten bleiben. Aus diesem Grund ist ein Cobot, der für eine Anwendung „sicher“ ist, nicht automatisch auch für eine andere sicher:Durch die Änderung des Werkzeugs, des Teils oder des Layouts ändern sich die Kontaktszenarien.
Anatomie eines Cobots:Komponenten und Spezifikationen
Das Datenblatt eines Cobots ähnelt dem eines kleinen Industrieroboters, mit einigen kollaborationsspezifischen Ergänzungen. Die Parameter, die bei der Auswahl am wichtigsten sind, sind:
- Nutzlast — die maximale Masse am Werkzeugflansch, einschließlich Greifer oder Werkzeug. Die Nutzlasten der Cobots im Jahr 2026 liegen bei 3, 5, 6, 10, 12, 16, 18, 20 und bis zur 30-kg-Klasse.
- Reichweite – der Radius des Arbeitsraums, typischerweise 500 mm bis 1.800 mm. Innerhalb einer Produktfamilie werden Reichweite und Nutzlast gegeneinander abgewogen.
- Wiederholbarkeit – wie genau der Arm zu einem eingelernten Punkt zurückkehrt, normalerweise ±0,02 mm bis ±0,1 mm, je nach Größe. Die Wiederholbarkeit misst die Konsistenz, die für die meisten Montage- und Wartungsaufgaben erforderlich ist.
- Freiheitsgrade — sechs ist Standard für allgemeine 3D-Aufgaben; Siebenachsige Cobots sorgen für eine flexiblere Reichweite in überfüllten Räumen.
- Werkzeugflansch und I/O — die Montageschnittstelle und die elektrischen/pneumatischen Anschlüsse für Greifer und Sensoren, oft durch das Handgelenk geführt.
- Sicherheitsbewertete Funktionen — Konfigurierbare Sicherheitszonen, Geschwindigkeitsbegrenzungen, Kraftbegrenzungen und der sicherheitsbewertete überwachte Stopp, alle zertifiziert nach den funktionalen Sicherheitsstufen ISO10218-1 und IEC61508/62061.
Die Fähigkeit zur Zusammenarbeit liegt hauptsächlich im Controller und der gemeinsamen Wahrnehmung, nicht in einer einzelnen sichtbaren Komponente. Aus diesem Grund können sich zwei Arme mit identischer Nutzlast und Reichweite erheblich in Sicherheit und Geschwindigkeit unterscheiden:Der Unterschied liegt in der Sicherheitssteuerung, der Sensorauflösung und der Abstimmung der Kollisionserkennung.
Wo Cobots eingesetzt werden
Cobots gedeihen bei Anwendungen, bei denen das Teilegewicht gering ist, die menschliche Nähe nützlich ist und die Flexibilität, den Arm neu einzusetzen, wichtiger ist als die Spitzenzykluszeit. Zu den häufigsten Anwendungsfamilien im Jahr 2026 gehören:
Maschinenwartung
Be- und Entladen von CNC-Maschinen, Spritzgusspressen und Abkantpressen. Der Cobot nimmt einen Rohling, belädt die Maschine, wartet auf den Zyklus und entlädt das fertige Teil. Da der Bediener auch bei gestopptem Cobot weiterhin auf die Maschine zugreifen kann, bleibt die Zelle flexibel. Die Maschinenbedienung ist gemessen an der installierten Basis die größte Cobot-Anwendung.
Montage und Schrauben
Sich wiederholende Befestigungs-, Einfüge- und Pick-Place-Montageaufgaben, oft zusammen mit einem Menschen, der urteilsintensive Schritte durchführt. Kraftgesteuerte Cobots eignen sich hervorragend für Einfügeaufgaben (Pressverbindungen, Schnappverbindungen), bei denen ein programmiertes Kraftprofil eine Beschädigung des Teils verhindert.
Verpacken und Palettieren
Endverpackung und leichte Palettierung. Cobot-Palettierer handhaben Kartons bis zur Traglast des Arms und bilden stabile Stapel auf einer Palette. Bei schwereren Kartons wird die Nutzlast zum limitierenden Faktor und ein herkömmlicher Palettierroboter übernimmt.
Qualitätsprüfung und Laborautomatisierung
Mit Kameras oder Sensoren ausgestattete Cobots führen wiederholbare Inspektionsdurchgänge durch und in Laboren handhaben sie Proben, Pipetten und die Instrumentenpflege. Das zaunlose Layout eignet sich für Umgebungen, in denen sich Menschen und Geräte enge Bänke teilen.
Schweißen und Oberflächenveredelung
Das Cobot-Schweißen hat sich in Lohnfertigungsbetrieben, in denen kurze Nähte und geringe Stückzahlen eine umzäunte Schweißzelle nicht rechtfertigen, rasant ausgeweitet. Cobots übernehmen auch das Schleifen, Polieren und Entgraten mit Kraftsteuerung. Für das dauerhafte Schweißen schwerer Teile in großen Mengen bleibt ein umzäunter 6-Achsen-Arm das richtige Werkzeug, wie in unserem Leitfaden für Schweißroboter für die Schwerindustrie beschrieben.
Gefährliche und extreme Umgebungen
Explosionsgeschützte Cobots erweitern den kollaborativen Betrieb auf Atmosphären mit brennbaren Gasen, wie z. B. Chemie-, Farb- und Energieanlagen. Diese erfordern zertifizierte Gehäusewerte anstelle von Standard-Cobot-Gehäusen. Einzelheiten zur Zertifizierung finden Sie in unserem speziellen Leitfaden zu explosionsgeschützten Cobots für gefährliche Umgebungen.
Cobot vs. Industrieroboter:Wenn jeder gewinnt
Die Wahl zwischen einem Cobot und einem herkömmlichen Industrieroboter ist eine Anwendungsentscheidung und keine Frage, welche Technologie fortschrittlicher ist. Die folgende Matrix umrahmt den Kompromiss.
| Faktor | Kollaborativer Roboter | Konventioneller Industrieroboter |
|---|---|---|
| Nutzlast | 3 bis 30 kg typisch | 5 bis 800+kg |
| Geschwindigkeit | Aus Sicherheitsgründen begrenzt; schneller mit Trennungsüberwachung | Hoch, optimiert für Zykluszeit |
| Sicherheitsschutz | Nach Risikobewertung oft zaunlos | Umzäunte Zelle, Lichtvorhänge, Verriegelungen |
| Grundfläche | Kompakt, keine schützende Stellfläche | Größer, inklusive Sicherheitsbereich |
| Neubereitstellung | Schnell; Der Arm kann zwischen Aufgaben bewegt werden | Langsamer; Zelle ist semipermanent |
| Geeignet für | Geringe Nutzlast, hoher Mix, menschennahe Aufgaben | Hohes Volumen, hohe Nutzlast, anhaltender Zyklus |
Einen vollständigen Entscheidungsrahmen finden Sie in unserer Begleitanalyse „Cobot vs. Industrieroboter:Wofür sollte sich Ihre Fabrik im Jahr 2026 entscheiden?“ Ein herkömmlicher Roboter gewinnt, wenn Volumen und Nutzlast hoch sind und die Zelle dediziert werden kann.
Einen Cobot sicher einsetzen:Die Risikobewertung
Ein weit verbreitetes Missverständnis ist, dass ein Cobot „out of the box“ sicher sei. Der Arm ist für die Zusammenarbeit konzipiert, aber die Anwendung als Ganzes – Arm plus Werkzeug, Teil, Layout und Aufgabe – muss bewertet und zertifiziert werden. Gemäß ISO10218-2 und ISO/TS15066 ist der Integrator (häufig der Endbenutzer) für eine Risikobewertung der gesamten kollaborativen Anwendung verantwortlich.
- Gefahren identifizieren. Kartieren Sie jeden Punkt auf dem Roboterpfad, an dem ein Kontakt mit einer Person möglich ist, sowie Gefahren durch Werkzeuge (scharfe Greifer, Hot-End-Effektoren) und das zu handhabende Teil.
- Klassifizieren Sie den Kollaborationsmodus. Entscheiden Sie, welchen der vier ISO/TS15066-Modi die Aufgabe verwendet und für welche Phasen des Zyklus.
- Überprüfen Sie die biomechanischen Grenzwerte. Bestätigen Sie bei leistungs- und kraftbegrenztem Betrieb, dass die Kontaktkraft und der Kontaktdruck für jeden möglichen Kontakt unter dem AnnexA-Grenzwert für diese Körperregion bleiben, durch Berechnung oder Messung mit einem Kraft-Druck-Testgerät.
- Sicherheitsfunktionen konfigurieren. Legen Sie Geschwindigkeits-, Kraft- und Zonengrenzen im Sicherheitscontroller fest und validieren Sie diese.
- Dokumentieren und validieren. Zeichnen Sie die Bewertung auf, validieren Sie die Bestandszelle anhand dieser und führen Sie bei jeder Änderung des Werkzeugs, Teils oder Layouts eine erneute Bewertung durch.
Wenn EVST-Anwendungsingenieure in der Praxis eine kollaborative Zelle vor Ort in Betrieb nehmen, kommt es bei der Validierung am häufigsten zu dem Befund, dass ein Greifer oder ein scharfkantiges Teil einen Kontaktdruck über dem AnnexA-Grenzwert erzeugt, obwohl sich der Arm selbst innerhalb der Kraftgrenzen befindet. Die Lösung besteht in der Regel in einer Neukonstruktion des Greifers, einem Kantenschutz oder einer Geschwindigkeitsreduzierung auf dem betroffenen Bahnsegment – nicht in einem anderen Roboter. Dies ist der Schritt, den Käufer am häufigsten unterschätzen, wenn sie davon ausgehen, dass ein Cobot keine Sicherheitstechnik mehr erfordert.
EVSTs kollaborative Roboterreihe
EVST mit Hauptsitz in Chengdu und Fertigung in Wenling hat in sieben Jahren Automatisierungslösungen in über 100 Länder geliefert. Seine kollaborative Roboterlinie deckt Nutzlasten von 3 kg bis zur 30-kg-Klasse ab. Zu den veröffentlichten Modellen gehören ein 3 kg / 620 mm Arm, ein 6 kg / 917 mm Arm, ein 12 kg / 1.300 mm Arm und ein 18 kg / 900 mm Arm. EVST produziert neben seinen herkömmlichen Industrierobotern QJAR, SCARA und Delta auch einen explosionsgeschützten kollaborativen Roboter für gefährliche Atmosphären und eine Cobot-Linie für den Catering-Service.
Die Produktionslinie von EVST verfügt über die Automobilqualitätszertifizierung IATF16949 und die Produkte verfügen über CE-, SGS- und TÜV-Zertifizierungen Dritter. Der explosionsgeschützte Cobot ist für den Einsatz in brennbaren Atmosphären ausgelegt und erweitert den kollaborativen Betrieb auf Umgebungen, in die Standard-Cobot-Gehäuse nicht eindringen können. Das Unternehmen verfügt außerdem über ein erteiltes Erfindungspatent (CNZL202011601091.6), vier Erfindungspatente in der Sachprüfung und zwei Software-Urheberrechte, unterstützt durch ein Feldtechniknetzwerk in über 100 Ländern für die Inbetriebnahme vor Ort und die Unterstützung bei der Risikobewertung.
Häufig gestellte Fragen
Was ist ein kollaborativer Roboter in einfachen Worten?
Ein kollaborativer Roboter ist ein Roboterarm, der so konstruiert ist, dass er ohne Schutzzaun sicher neben Menschen arbeiten kann. Es verwendet Drehmomentsensoren in seinen Gelenken, um den Kontakt zu erkennen und schnell anzuhalten, und es ist mit geringer Masse, begrenzter Geschwindigkeit und abgerundeten Oberflächen konstruiert, sodass jeder Kontakt unter den Kraft- und Druckgrenzen bleibt, die zu Verletzungen führen könnten, wie in ISO/TS15066 definiert.
Brauchen Cobots wirklich keinen Schutzzaun?
Oft, aber nicht automatisch. Ob ein Zaun erforderlich ist, hängt von der Risikobewertung der gesamten Anwendung, des Arms samt Werkzeug, des Teils und der Aufgabe ab. Viele Anwendungen mit geringer Nutzlast und niedriger Geschwindigkeit laufen nach der Bewertung ohne Zaun. Aber ein scharfes Werkzeug, ein schweres oder scharfkantiges Teil oder eine hohe Geschwindigkeitsanforderung können zusätzliche Schutzmaßnahmen oder eine Geschwindigkeits- und Abstandsüberwachung erfordern. Der Cobot ermöglicht eine zaunlose Anlage; die Gefährdungsbeurteilung bestätigt, ob dies zulässig ist.
Welche Nutzlast und Reichweite benötige ich für einen Cobot?
Addieren Sie das Teilegewicht und das Greifergewicht zur Größe der Nutzlast und lassen Sie einen Spielraum von etwa 20 % bis 30 %. Für die maschinelle Bearbeitung von Kleinteilen ist ein 5- bis 10-kg-Arm üblich; für Palettierung oder schwerere Handhabung, 16 kg bis 30 kg. Die Reichweite sollte den gesamten Arbeitsbereich der Aufgabe abdecken, typischerweise 600 mm bis 1.300 mm für Tisch- und Maschinenbedienungsarbeiten, länger für Palettierung.
Was ist der Unterschied zwischen ISO10218 und ISO/TS15066?
ISO10218 (Teile 1 und 2) ist der zentrale Sicherheitsstandard für Industrieroboter und deren Integration. ISO/TS15066 ist eine technische Spezifikation, die diese speziell für den kollaborativen Betrieb ergänzt und in ihrem Anhang A die vier Kollaborationsmodi sowie die biomechanischen Kraft- und Druckgrenzen hinzufügt. Eine kollaborative Anwendung muss beides erfüllen. Eine käuferorientierte Aufschlüsselung finden Sie in unserem Leitfaden zu Cobot-Sicherheitsstandards auf der EVST-Produktseite.
Wie schnell kann sich ein Cobot bewegen?
Im leistungs- und kraftbegrenzten Modus ist die Geschwindigkeit des Cobots begrenzt, sodass der Worst-Case-Kontakt innerhalb der biomechanischen Grenzen bleibt, oft deutlich unter denen eines herkömmlichen Roboters. Mit der Geschwindigkeits- und Abstandsüberwachung kann derselbe Arm nahezu sein mechanisches Maximum erreichen, wenn sich kein Bediener in der Schutzzone befindet, und dann langsamer werden oder anhalten, wenn sich eine Person nähert. Hybridkonfigurationen gewinnen den größten Teil des verlorenen Durchsatzes zurück und wahren gleichzeitig die Sicherheit der Zusammenarbeit.
Wohin als nächstes gehen
Um einen bestimmten Cobot einer Nutzlast- und Reichweitenanforderung zuzuordnen und einen Weg zu einem Angebot zu finden, sehen Sie sich den EVST-Produkt-Site-Leitfaden zur Auswahl kollaborativer Roboternutzlasten von 3 kg bis 30 kg an. Einzelheiten zu den Sicherheitsstandards, die Käufer benötigen, bevor sie eine zaunlose Zelle spezifizieren, finden Sie in der Erläuterung der Cobot-Sicherheitsstandards für Käufer. Für eine umfassendere Build-or-Buy-Entscheidung lesen Sie „Cobot vs. Industrieroboter“ und zur Schätzung der Rendite nutzen Sie unseren Cobot-ROI-Rechner für die KMU-Fertigung. Für Beschaffungsfragen ist der EVST-Vertrieb über die Kontaktseite erreichbar.
Über den Autor:Das EVST-Redaktionsteam schreibt über Industrierobotik und intelligente Fertigung für Ingenieure und Betriebsleiter, die Automatisierungsprojekte bewerten. EVST (EVSTECHCO.,LTD), 2018 in Chengdu gegründet, hat über 600 Automatisierungsprojekte durchgeführt und in über 100 Länder geliefert, mit IATF16949-Automobilzertifizierung und CE/SGS/TUV-Zertifizierungen Dritter für die QJAR-, kollaborativen Roboter-, SCARA- und Delta-Produktfamilien.
Industrieroboter
- Verwenden von Automatisierung und Robotik zum Aufrüsten einer Fabrik
- Fanuc ArcMate 100iBe ist absolut präzise und dennoch kompakt
- Erreichen von Schneidgenauigkeit mit Motoman-Plasmaschneiderobotern
- Verbessern Sie Ihre Roboterfertigung mit dem Inventor-Plug-in
- Top 10 der Hersteller von Industrierobotern im Jahr 2020
- Die vierte industrielle Revolution ist unter uns
- Was ist Robotic Process Automation und ihre Vorteile
- Fortschrittliche Automatisierung in die Automobilindustrie bringen
- Was ist der Unterschied zwischen Sechsachsen-, SCARA- und kartesischen Robotern?
- Erste Schritte mit RoboDK für Raspberry Pi