


Smart Cities:Argumente für Lidar in intelligenten Verkehrssystemen
Ein Aspekt der Smart Cities-Agenda ist der Einsatz intelligenter Verkehrssysteme. Ein Pilotprojekt mit Lidar-Sensoren bei der San Francisco Municipal Transportation Agency (SFMTA) hat gezeigt, wie Lidar eine Lösung für das städtische Pilotprojekt für intelligente Verkehrssignale bereitgestellt hat, das Teil der Vision Zero-Richtlinie von San Francisco ist.
Ziel der Vision Zero-Politik der Stadt ist es, die Verkehrssicherheit zu verbessern, da jedes Jahr etwa 30 Menschen ihr Leben verlieren und über 200 weitere schwer verletzt werden, wenn sie auf den Straßen von San Francisco unterwegs sind. Das Ziel des Pilotprojekts für intelligente Verkehrssignalanlagen in diesem größeren Rahmen bestand darin, den Einsatz von multimodalen intelligenten Verkehrssignalsystemen (MMITSS), dedizierter Nahbereichskommunikation (DSRC), Transitsignalpriorität (TSP) und Notfallfahrzeugvorrang (EVP) zu untersuchen ) Technologie, um Notfall- und Transitfahrzeugen Vorrang einzuräumen. Darüber hinaus sollte das MMITSS auch in der Lage sein, Fußgänger und Fahrräder zu erkennen, um ihnen Führungsintervalle, Scrambles und/oder geschützte Phasen zu bieten.
Der erste Machbarkeitsnachweis, der im Januar 2020 endete, setzte Lidar-Sensoren an fünf Kreuzungen ein und demonstrierte die Fähigkeit, Daten präzise und anonym mit einer Genauigkeit von 96 % zu profilieren. Der zweite Machbarkeitsnachweis sieht vor, die Datenschicht zum Signalsteuerungsnetzwerk hinzuzufügen, um die „Intelligenz“ in ITS zu ermöglichen; dies ist im Gange und wird voraussichtlich Anfang 2021 abgeschlossen sein.
Wir haben mit zwei Beteiligten gesprochen, die etwas Licht in die Technologie, den Einsatz und die erzielten Ergebnisse gebracht haben, und stellen hier die Highlights der Gespräche vor. Zuerst sprachen wir mit dem Chief Marketing Officer des Lidar-Sensortechnologieanbieters Quanergy, Enzo Signore. Dann haben wir uns mit Paul Hoekstra, dem unabhängigen Strategieumsetzungsberater für das Projekt mit SFMTA, tiefer in das eigentliche Proof-of-Concept-Projekt vertieft.
Lidar:IDs von Objekten anonym verfolgen
Enzo Signore von Quanergy erklärt den Nutzen der Lidar-Technologie in dieser Art von Anwendung, die eine Personen- und Fahrzeugzählung sowie ein Verkehrsflussmanagement erfordert, und insbesondere mit dem Verbot der Gesichtserkennung.
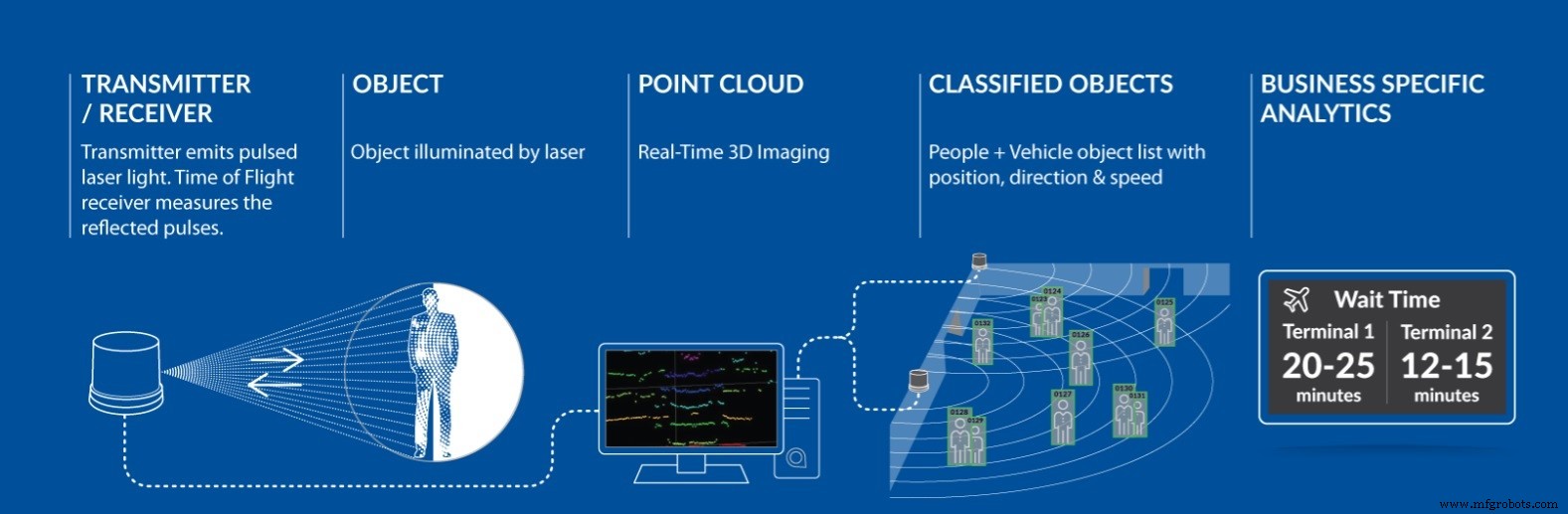
Das zentrale Wertversprechen der Lidar-Technologie in Anwendungen wie Stadien und Smart Cities ist die Möglichkeit, ein Objekt, das sich über verschiedene Sensorpunkte bewegt, anonym zu verfolgen. Zum Beispiel würde ein Auto viele Kreuzungen passieren oder ein Fußgänger viele Bereiche. Quanergy kann einem Objekt eine ID zuweisen, und diese ID bleibt während der gesamten Fahrt im überwachten Bereich beim Objekt.
Dies ist sehr komplex, denn wenn Sie mehrere Kreuzungen durchlaufen, benötigen Sie mehrere Sensoren und mehrere Server für die Edge-Berechnung. Die meisten Technologien haben nur eine isolierte Ansicht des Bereichs, den sie verwalten, und wenn Sie die Grenze zwischen einem Bereich und dem anderen überschreiten, geht die ID verloren und Sie erhalten eine andere ID. Bei diesem Ansatz verlieren Sie den Überblick über den gesamten Personenstrom.
Wir haben eine Technologie namens automatisierte ID-Übergabe, die die ID der Person oder des Fahrzeugs von einem Bereich zum anderen weiterleitet. Solange wir ein Sichtfeld haben, bleibt dieselbe ID beim Objekt. Dies ermöglicht eine sehr gute End-to-End-Sichtbarkeit und -Verfolgung. Dies kann für Flughäfen wichtig sein, zum Beispiel vom Bordstein bis zum Gate, wo Sie das Passagiererlebnis optimieren könnten, sowie für Einkaufszentren und Städte. Die einzelne ID für jede Person hilft dabei, End-to-End-Analysen zu ermöglichen.
Quanergys Sensoren der M-Serie bieten eine Erkennung über große Entfernungen, wie der MQ-8, der speziell für Durchflussmanagementanwendungen entwickelt wurde. So unterscheiden sich diese Sensoren. Typische Lidar-Sensoren haben eine symmetrische Strahlkonfiguration. Wenn Sie den Sensor flach montieren, geht normalerweise die Hälfte des Strahls zum Himmel und die andere Hälfte zum Boden. Wenn es 3 Meter hoch an einem Straßenlaternenpfahl montiert ist und nach unten für den Fußgängerblick schaut, wird in dieser Konfiguration die Hälfte des Lichtstrahls verschwendet.
In unserem Design zeigen alle Balken tatsächlich nach unten, was eine symmetrische Abdeckung des Bodens ermöglicht. Das heißt, es gibt keine toten Winkel, wenn eine Person durch das Sichtfeld geht. Dies gibt die Möglichkeit, eine Person oder ein Fahrzeug überall im Sichtfeld ohne Unterbrechung zu verfolgen. Wir können ein Objekt bis zu einer Entfernung von 70 m (dh:15.000 m²) sehen. Dies ist ein sehr großer Bereich, für den sonst viele Kameras benötigt würden, um eine ähnliche Abdeckung zu erreichen. Dadurch reduziert sich die Anzahl der Sensoren und auch die Kosten.
Überwindung von Datenschutzproblemen im Zusammenhang mit der Gesichtserkennung
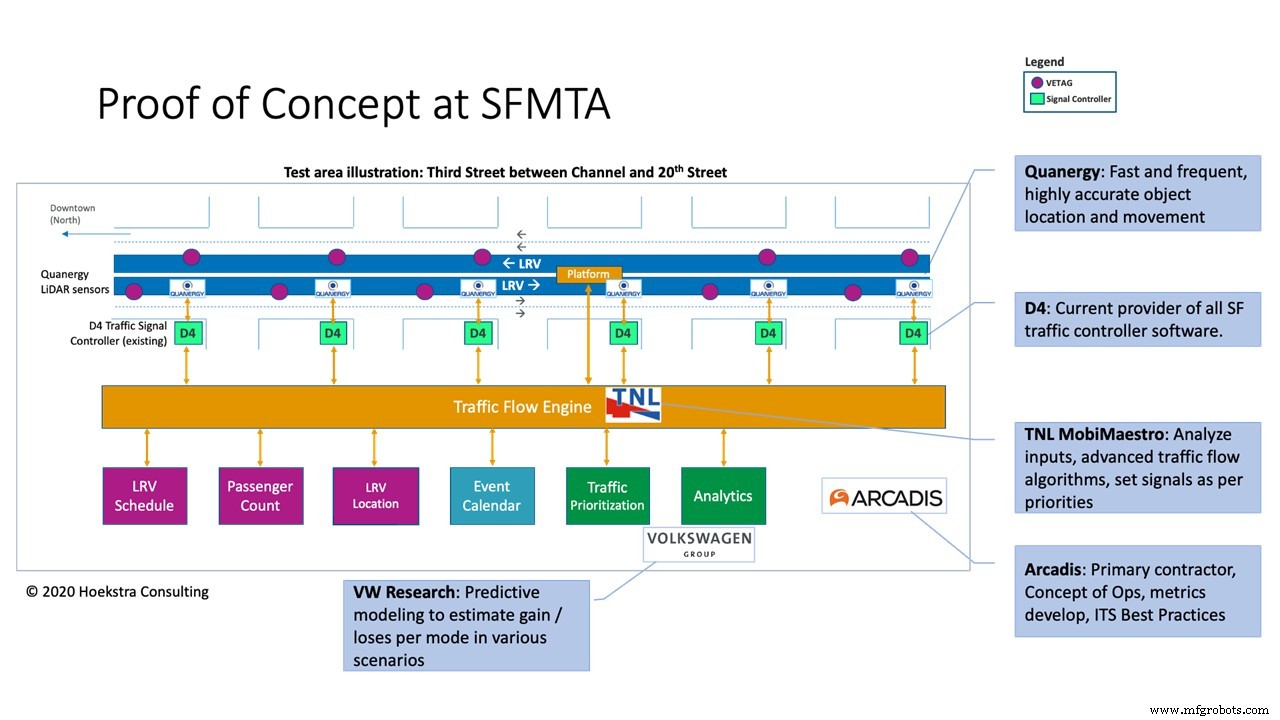
Paul Hoekstra, für SMTA , beschreibt die Denkweise hinter der Implementierung und das Ergebnis des ersten Proof of Concept (PoC) über fünf Kreuzungen am 3. rd Straße und Pläne zur Erweiterung der Abdeckung.
Wir haben im April 2019 mit der Zusammenarbeit mit SFMTA, Cisco und Quanergy als Partner an diesem Projekt begonnen. Zunächst hatten wir als Teil des Cisco-Pakets DSRC-Sensoren. Wir stellten fest, dass wir sie nur benutzten, um all die Autos auf dem Korridor und auf der Autobahn, die wir abdeckten, zu hören. Wir fanden heraus, dass weniger als 1% aller Autos dieses DSRC-Signal tatsächlich ausstrahlen. Aus dieser Anwendungsfallperspektive muss die Schlussfolgerung sein, dass Sie DSRC nicht für die Verkehrsflussmessung verwenden können. Es ist einfach nicht aussagekräftig genug, um Entscheidungen zu treffen.
Zu diesem Zeitpunkt haben wir nun den ersten (PoC) mit Quanergy-Sensoren fertiggestellt und befinden uns jetzt mitten im zweiten PoC.
Beim ersten PoC haben wir 20 Lidar-Sensoren genommen und sie am 3. . . an fünf Kreuzungen installiert Straße, in der Nähe des neuen Basketballstadions, das letztes Jahr eröffnet wurde. Wir hatten Edge Computing mit Cisco TRX, auf dem die Quanergy QORTEX-Software ausgeführt wurde. Die Daten vom Lidar gehen über die TRX-Box und die Qortex-Software veröffentlicht die Daten an das Netzwerk, das an das Rechenzentrum geht, einen kleinen VM-Cluster, auf dem die Cisco Kinetic-Plattform läuft, die alle Nachrichten speichert – alle 30 Millionen pro Woche.
Jeden Sonntag werden darauf Berichte veröffentlicht, eine für die Fahrzeuge, die das Fahrzeug anhand der Lidar-ID an der Kreuzung identifizieren, mit einer ganzen Reihe von Attributen, wie Uhrzeit, Wochentag, woher kam es, wohin ging es, wie oft gab es einen Halt, wie lange war der Halt, wie war die Geschwindigkeit, gab es eine Veranstaltung (aus dem Veranstaltungskalender). Auf diese Weise könnten wir alle Kreuzungen verbinden und den Fahrzeugen durch den Korridor folgen. Und dann könnten wir Dinge sagen wie:"Dies ist der Betrag, der an der Südseite des Korridors in Richtung Norden eingetreten ist, und wie viele dann abgebogen sind und so weiter".
Mit QORTEX von Quanergy haben wir es kalibriert und eine Genauigkeit von 96% erreicht. Sie können mit dem LIDAR nicht nur IDs zählen; Sie müssen eine Logik erstellen, um sicherzustellen, dass die gleiche ID im Egress wie im Ingress vorhanden ist. Mit dieser Logik können wir den Autos durch die Kreuzung folgen. Wir haben eine Logik, die definiert, was ein Stopp ist. Daher sind wir bei einer Genauigkeit von 96% gelandet, sie ist sehr präzise. Bei Fußgängern können Sie mit den von uns definierten Zonen sehen, ob sich die Person auf oder außerhalb des Bordsteins befindet. Sie können sehen, ob sich eine Person innerhalb oder außerhalb der Grenzen eines Zebrastreifens befindet. Sie können sehen, wie nah ein Auto an der Person war. Mit dieser Art von Daten können wir Berichte über Beinaheunfälle erstellen. Wir haben definiert, was Beinahe-Unfälle sind – die Vektoren, die Geschwindigkeit, und berechnen dann die Zeit, in der sie kollidieren, und ob sie in einem bestimmten Bereich liegt, dann nennen Sie es Beinahe-Unfall.
Dies ist nur möglich, weil die Daten von QORTEX so präzise sind, dass wir sie sehen können, ohne jemals jemanden identifizieren zu müssen. Wir speichern keine identifizierbaren persönlichen Daten. Ein Mensch ist nur ein Punkt. Und ein Auto ist nur ein Block, man weiß nicht, was für ein Auto es ist. Wir klassifizieren nach Größe.
Beim ersten PoC drehte sich alles um Analyse. Im zweiten erweitern wir die Anzahl der Kreuzungen. Jetzt haben wir also fünf, und wir werden zu 10 gehen. Mit anderen Worten, ein größerer Korridor.
Wir schichten dann alle Daten ein, die derzeit in den Schränken eingeschlossen sind. In den Schränken befindet sich ein Signalcontroller und auf dem Controller befinden sich viele Aktoren. Dies können die Schleifenerkennung eines Fahrzeugs, ein Fußgängertaster oder Sensoren in der Stadtbahn sein. Es gibt eine Ampelpriorisierung. All dies sitzt im eingebetteten Signalcontroller.
Was wir jetzt also tun, ist, einen bidirektionalen Informationsaustausch mit den Signalsteuerungen zu ermöglichen, indem wir alle Daten von den Kreuzungen, wie z. Die Objektklassifizierung dieser Sensoren (die alle auf den Sensoren verarbeitet werden) gibt uns die Anzahl der Personen sowie deren Klassifizierung – z ein Fahrrad haben. Viele dieser Faktoren bestimmen die Verweildauer des Transitfahrzeugs. Wir möchten die prognostizierte Verweildauer basierend auf der Anzahl der anwesenden Personen kennen.
Aus dem Backend-System werden wir die Anzahl der Fahrzeuge erfassen. Und dann können wir mit der Analytik feststellen, ob wir beispielsweise 20 Sekunden Verweilzeit oder 32 Sekunden Verweilzeit benötigen. Wir können dann alle 10 Schnittpunkte extrapolieren,
Behandeln des gesamten Verkehrskorridors als Netzwerk
Um den gesamten Korridor zu optimieren, können wir dies nicht tun, ohne genau zu wissen, wo sich Menschen und Fahrzeuge wie lange befinden. Das bedeutet, dass wir den gesamten Korridor als Netzwerk behandeln, nicht als einzelnen Knoten. Das bedeutet, dass wir die Algorithmen mit hoher Frequenz durchlaufen, und jetzt diskutieren wir, ob wir schneller als 1 Hertz gehen müssen, wir berechnen alles jede Sekunde neu.
Dann sagen wir dem Signalcontroller tatsächlich, dass Sie in Richtung Norden grün fahren sollen. Das schließt die Schleife. Wenn Sie von der Lieferkettenarbeit von Cisco lernen, wissen Sie, dass Sie nur so Dinge durch die Kreuzung bewegen können. Die gesamte Technik ist verfügbar, aber sie optimiert nur alle Silos. Auf diese Weise machen wir mit einem neuen Paradigma, dem integrierten Verkehrsmanagement, einen großen Sprung nach vorne.
In San Francisco gibt es bereits 7.000 Kameras. Aber Kameras liefern Ihnen nur ein 2D-Bild. Die Genauigkeit des Standorts ist weniger genau als die, die Sie mit Lidar erreichen können. Lidar funktioniert immer, bei Regen, nachts. Und es bleibt sehr weit weg von den Datenschutzproblemen. In dem Moment, in dem Menschen wissen, dass sie verfolgt werden oder erkannt werden können, gibt es das Problem, dass die Menschen kein Vertrauen in die Regierung haben, um sie zu schützen.
Die Ergebnisse dieses Projekts sind, dass Rettungsfahrzeugen bei Notfällen Vorrang eingeräumt wird, Fahrzeiten und Haltestellen optimiert und sogar Autos in Zügen aufgestellt werden, wenn keine öffentlichen Verkehrsmittel verfügbar sind, um sie effektiver durch den Korridor zu bewegen.
Sensor
- Plädoyer für neuromorphe Chips für KI-Computing
- Der C-Suite-Fall für DDMRP
- WLAN:Das Allheilmittel für Smart Everything
- Die Kraft intelligenter Städte für eine bessere Zukunft nutzen
- Die Argumente dafür, die amerikanische Fertigung nach Hause zu bringen
- Unternehmen setzen Fristen für intelligente Systeme
- Der Fall für den 3D-Druck in der Fertigung
- Finden der Amortisation für intelligente Fertigung
- Material für die nächste Generation intelligenter Sensoren
- Software für die smarte Fabrik:Die Vorteile hardwareunabhängiger Software