


Desinfektionsroboter mit UV-Licht
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 |
Notwendige Werkzeuge und Maschinen
 |
|
Über dieses Projekt
Einführung in den Roboter
Ultravioletter keimtötender Roboter (UV-Roboter) ist ein teleoperierter Roboter, der mit einem UV-Lichtsystem ausgestattet ist. Das System enthält ein sich bewegendes Roboterfahrzeug und eine Bodenstationssteuerung (GCS). Der Bediener kann den Roboter mit dem Joystick der Bodenstationssteuerung (GCS) steuern, während er die Kameraaufnahme des Roboters beobachtet.
Der Roboter kann Krankheiten, Viren, Bakterien und andere Arten von schädlichen organischen Mikroorganismen in der Umgebung mit ultraviolettem Licht desinfizieren und abtöten, indem er ihre DNA-Struktur abbaut. Derzeit haben mehrere Länder diese Roboter erfolgreich getestet, um ihre Krankenhäuser, öffentlichen Verkehrsmittel, Büroräume und andere öffentliche Orte zu desinfizieren. Wir haben diesen UV-Roboter kostengünstig implementiert, um den Desinfektionsprozess auf öffentliche Plätze auszudehnen.
Warum keine desinfizierenden Flüssigkeiten?

Die gebräuchlichste und beliebteste Methode zur Desinfektion öffentlicher Plätze ist das Aufsprühen von Desinfektionsflüssigkeiten, die zu 70 % aus Flüssigkeiten bestehen. Vor kurzem hat die Weltgesundheitsorganisation (WHO) bekannt gegeben, dass es wirklich schädlich ist, regelmäßig desinfizierende Flüssigkeiten an öffentlichen Orten zu verwenden. Dies kann aufgrund ihres starken Geruchs zu Problemen in den Atemwegen führen, Hautreizungen verursachen und zu Ungleichgewichten in der Umwelt führen.
Außerdem ist diese Methode täglich mit enormen Material- und Arbeitskosten verbunden.
Vorteile des UV-Roboters
- Einmalige Kosten (kein Nachfüllen von Alkohol oder Chlorflüssigkeit erforderlich).
- Kann zur Desinfektion von Oberflächen, medizinischen Anzügen, medizinischen Masken und anderen medizinischen Geräten verwendet werden.
- Reduzieren Sie die Desinfektionszeit um 60 % im Vergleich zu flüssigkeitsbasierten Desinfektionsmethoden. (Die Trocknungszeit ist bei Verwendung in Umgebungen, in denen Stoffmaterialien verfügbar sind, beträchtlich hoch).
- Fähigkeit zur Verwendung für Umgebungen mit elektronischen Geräten.
- Ein Operator kann einen großen Bereich abdecken. (Keine Notwendigkeit mehrerer Personen wie bei Flüssigkeitssprays)
- Wir haben eine Desinfektionsrate von 99,997 % getestet und nachgewiesen für diesen Roboter in Zusammenarbeit mit einem Mikrobiologielabor einer örtlichen Universität. (Erklärt im letzten Abschnitt)
Ultraviolette keimtötende Bestrahlung (UVGI)
Ultraviolette keimtötende Bestrahlung (UVGI) ist eine Desinfektionsmethode, bei der kurzwelliges ultraviolettes (ultraviolettes C oder UVC) Licht verwendet wird, um Mikroorganismen abzutöten oder zu inaktivieren, indem Nukleinsäuren zerstört und ihre DNA zerstört wird, sodass sie keine lebenswichtigen Zellfunktionen ausführen können. UVC wird von RNA- und DNA-Basen absorbiert und kann die photochemische Fusion zweier benachbarter Pyrimidine zu kovalent verknüpften Dimeren bewirken, die dann zu nichtpaarenden Basen werden.
UVGI wird in einer Vielzahl von Anwendungen verwendet, wie zum Beispiel bei der Lebensmittel-, Luft- und Wasserreinigung. UVGI kann verwendet werden, um die Ausbreitung bestimmter Infektionskrankheiten zu verhindern. Niederdruck-Quecksilberentladungslampen (Hg) und LEDs werden häufig in UVGI-Anwendungen verwendet und emittieren kurzwellige Ultraviolett-C-Strahlung (100–280 Nanometer), hauptsächlich bei 254 nm.
Jeder Mikroorganismus benötigt eine andere Dosierung von UV-Licht, um seine Funktionalität zu deaktivieren. In Anbetracht der Covid-19-Situation wird hier die Inaktivierung desselben Virus durch UV-Licht erwogen. In den meisten Forschungsarbeiten und Artikeln haben Forschergruppen das erforderliche UV-Licht für den Sterilisationsprozess in Form von "Joule pro Quadratmeter" oder "Joule pro Quadratzentimeter" genannt. Aber wenn man die Parameter und Spezifikationen des UV-Lichts betrachtet, geben die Hersteller die UV-Lichtintensität in "Mikrowatt(uW) pro Quadratzentimeter" in 1 Meter Entfernung an.
Die Einheit „Watt(W)“ stellt die Energie dar, die innerhalb einer Sekunde abgegeben wird. Mikrowatt pro Quadratzentimeter steht für die Energie, die innerhalb einer Sekunde durch eine Fläche von einem Quadratzentimeter geleitet wird.
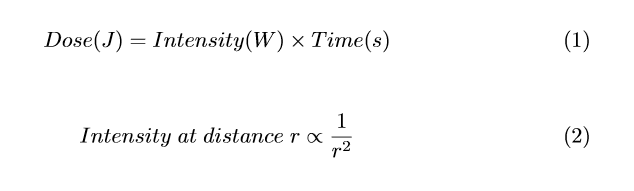
Gleichung 1 zeigt das Verhältnis zwischen Dosierung und Intensität. Es kommt zu dem Schluss, dass durch Variieren der Belichtungszeit mit derselben UV-Lichtquelle unterschiedliche Dosierungen erreicht werden können.
Die Beziehung zwischen der UV-Intensität und der Entfernung wird durch Gleichung 2 gezeigt. Daraus kann geschlossen werden, dass die UV-Intensität mit der Entfernung von der Lichtquelle abnimmt.
Laut Wikipedia kann eine Dosis von 8 mJ die meisten Viren inaktivieren.
Die Funktionsweise des Roboters verstehen
Das Gesamtsystem ist etwas komplex, da wir einige Funktionen und Sicherheitsmerkmale hinzugefügt haben, um den Industriestandards zu entsprechen. Bevor Sie das Implementierungsverfahren erklären, ist es gut zu verstehen, wie das System funktioniert.
Der Roboter hat 3 Hauptkomponenten.
1. Das Bodenfahrzeug

Dieser Teil wird von zwei Rädern bewegt, die von Gleichstrom-Getriebemotoren angetrieben werden (ein Roboter mit Differentialantrieb). Vorne und hinten befinden sich zwei Lenkrollen, um das Gleichgewicht zu halten. Wir haben das elektronische Kontrollsystem und die Batterie, bei der es sich um eine 12V 35Ah Blei-Säure-Batterie handelt, im Bodenfahrzeug platziert.
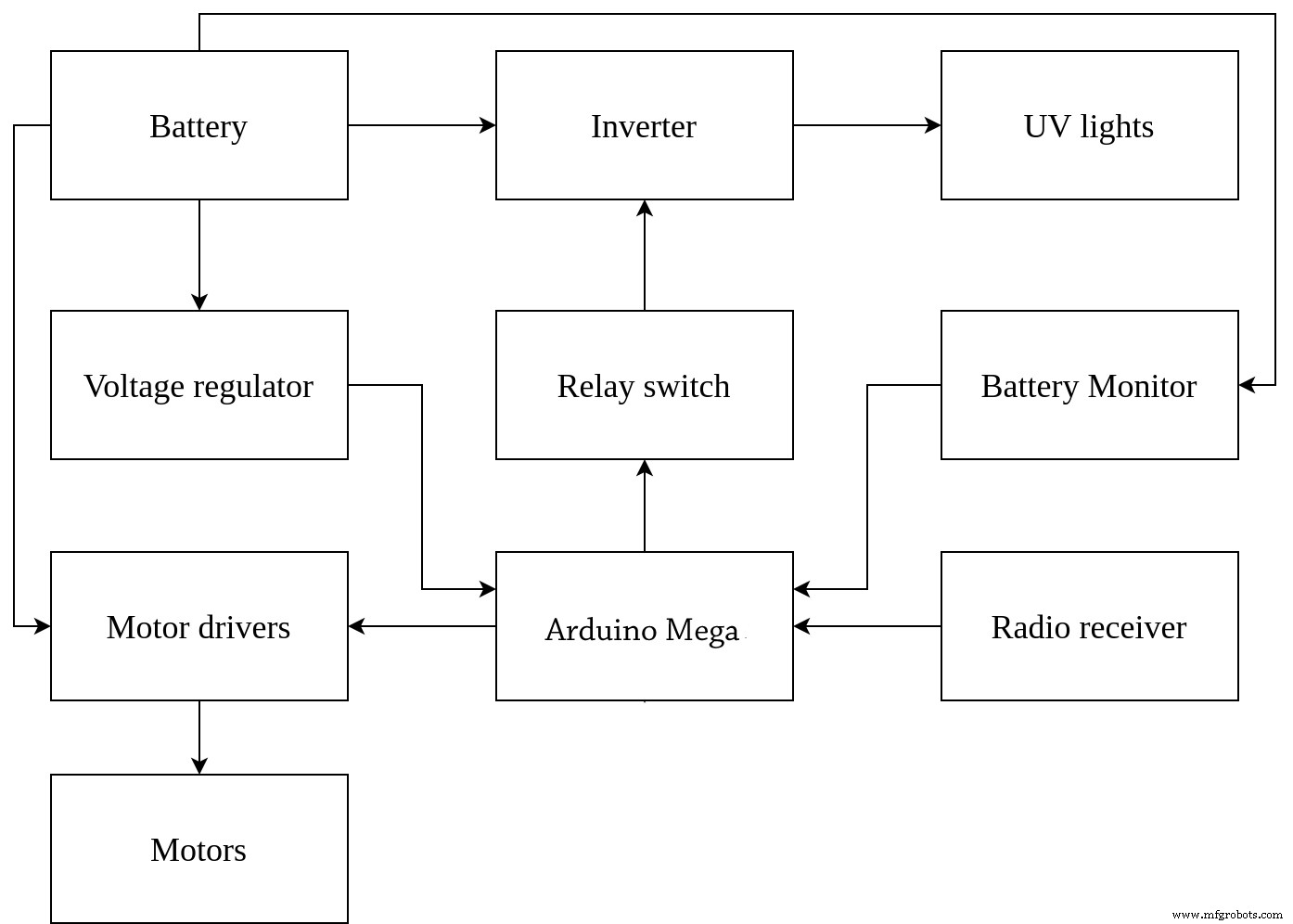
Arduino Mega wird mit der Hauptbatterie über ein Spannungsreglermodul betrieben, um die Spannung von 12 V auf 5 V zu reduzieren. An das Mega-Board ist ein 4-Kanal-RC-Funkempfänger mit PWM-Ausgängen angeschlossen. Die Motoren werden über einen Zweikanal-H-Brücken-Motortreiber angetrieben, der mit der Arduino-Platine verbunden ist. Ein Wechselrichter wird zwischen die UV-Lichter und die Batterie geschaltet und über einen Relaisschalter gesteuert, der mit der Arduino-Platine verbunden ist.
2. Der UV-Lichtturm
Wir haben fluoreszierende UV-Lampen verwendet, die ein separates elektronisches Vorschaltgerät benötigen, um die Lampe mit Strom zu versorgen. Der Lichtmast enthält 6 UV-Lampen, die um einen Aluminiumzylinder gelegt werden, der durch Rollen aus einem Aluminiumblech hergestellt wird. Dieser Aluminiumzylinder fungiert als Reflektor für UV-Strahlen.
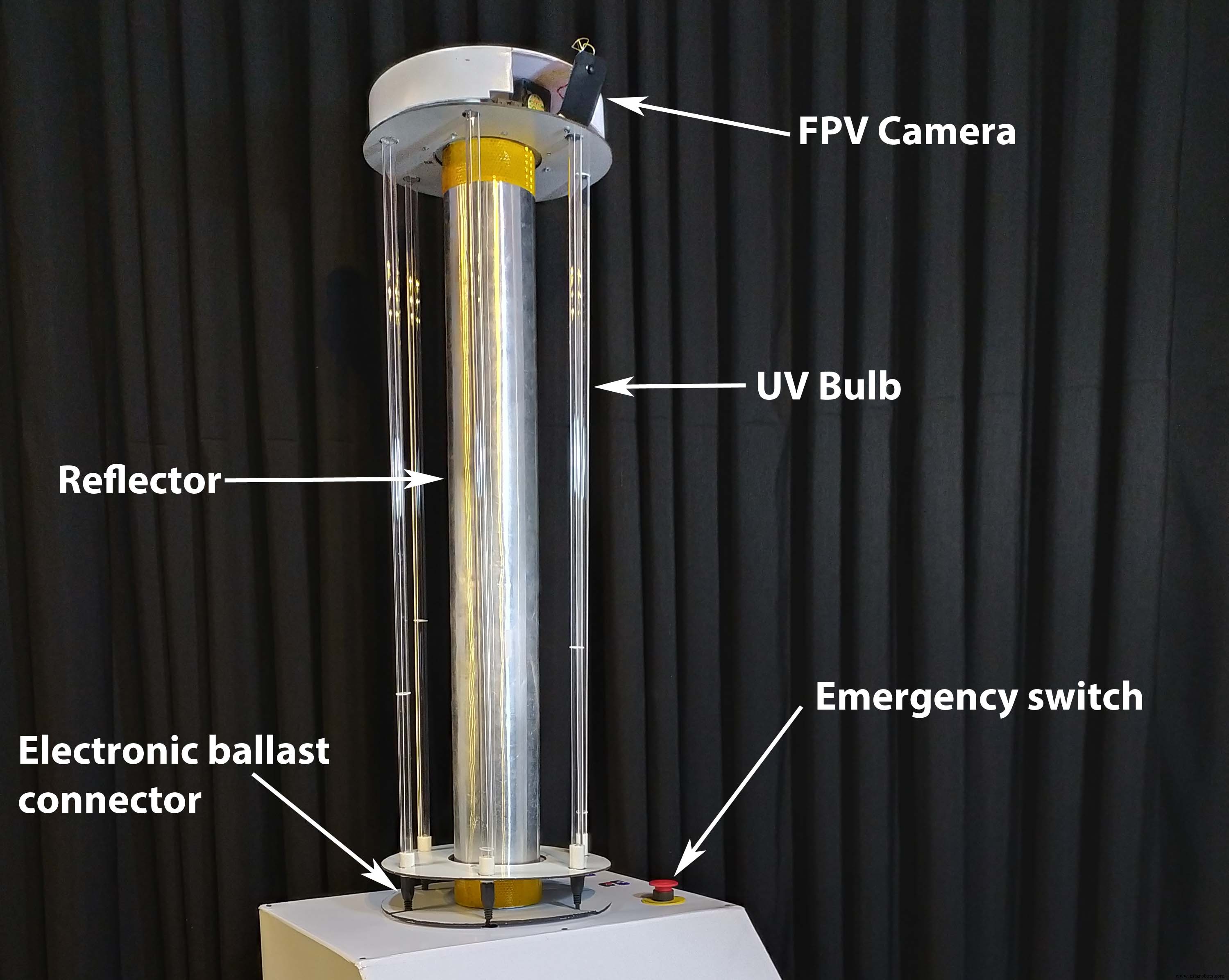
Alle elektronischen Vorschaltgeräte sind im Aluminiumzylinder untergebracht. Oben auf dem Turm befinden sich eine FPV-Kamera und ein FPV-Sender, um den Videofeed an das GCS zu übertragen. Der UV-Turm wird oben auf dem Bodenfahrzeug befestigt.
3. Bodenstationscontroller

Dies ist die Fernbedienung des Roboters. Der Bildschirm zeigt das vom Roboter empfangene Kamera-Feedback. Der Joystick wird verwendet, um den Roboter zu bewegen. UV-Lichter können mit dem UV-Schalter ein- und ausgeschaltet werden. Der Scharfschaltschalter dient als Sicherheitsschalter. Es reduziert alle Funktionen des beim Einschalten.
UV-Licht einschalten

Für unseren Roboter haben wir 6 UV-Lampen mit den folgenden Spezifikationen ausgewählt.
- Leistung - 55w
- Wellenlänge - 254 nm
- Länge - 890 mm
- Rohrdurchmesser - 15 mm
- Typ - einzelnes Ende 4 Pin
Dies sind keine strengen Spezifikationen mit Ausnahme der Wellenlänge. Das elektronische Vorschaltgerät wird an die 4 Pins der UV-Lampe angeschlossen. UV-Lampen leuchten auf, wenn das elektronische Vorschaltgerät mit Strom versorgt wird.
***UV-Licht ist schädlich für die menschliche Haut und die Augen. Setzen Sie Augen und Haut nicht über einen längeren Zeitraum aus. Das Beobachten des Lichts durch Glas ist das sicherste Verfahren, da UV-Licht transparentes Glas nicht durchdringen kann.***
FPV-Videosystem
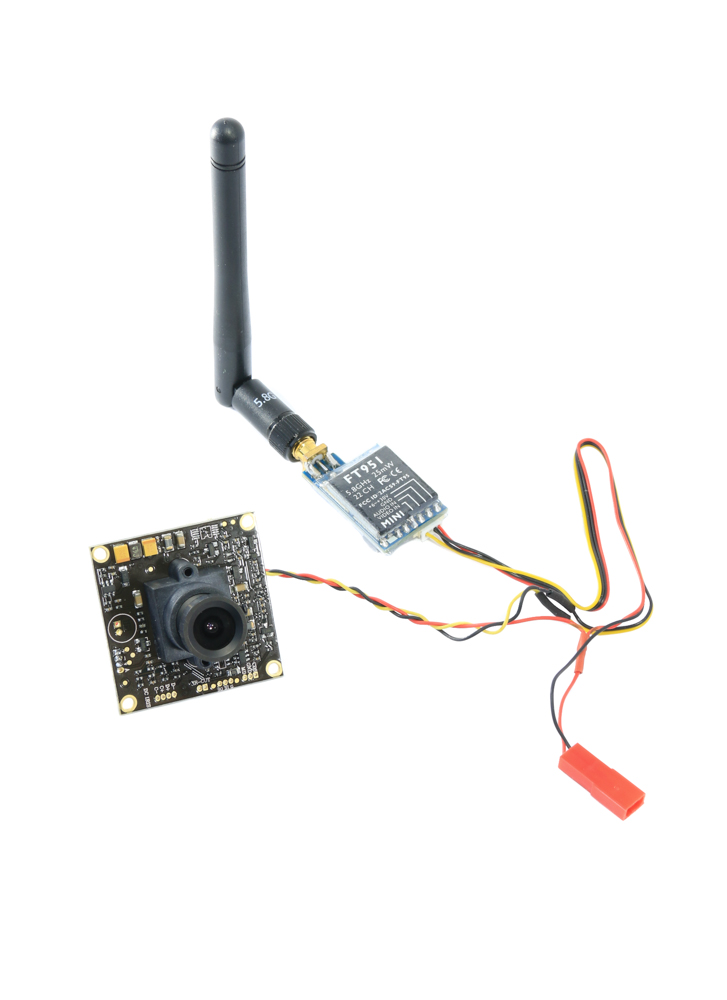

FPV Videosysteme werden hauptsächlich in Drohnen verwendet, um die Vogelperspektive zu erhalten. In unserem Fall macht es die Verwendung eines FPV-Systems einfach, den Video-Feed vom Roboter ohne Programmieren oder Löten von Komponenten zu erhalten. Der Roboter verfügt über eine Kamera und einen Videosender. Wir müssen nur das System an die Stromversorgung anschließen und es beginnt mit der Übertragung des Videofeeds mit 5,8 GHz.
Der GCS hat den LCD-Bildschirm mit einem eingebauten 5,8 GHz Videoempfänger. Sobald Sie den Bildschirm einschalten, wird der Kamera-Feed angezeigt.
Bau des Bodenfahrzeugs
Die Hauptstruktur besteht aus 0,75 'Stahlkastenstangen. Im Folgenden sehen Sie das Design, das für unseren Roboter verwendet wird, aber beschränken Sie sich nicht darauf. Ändern Sie das Design nach Ihren Wünschen.
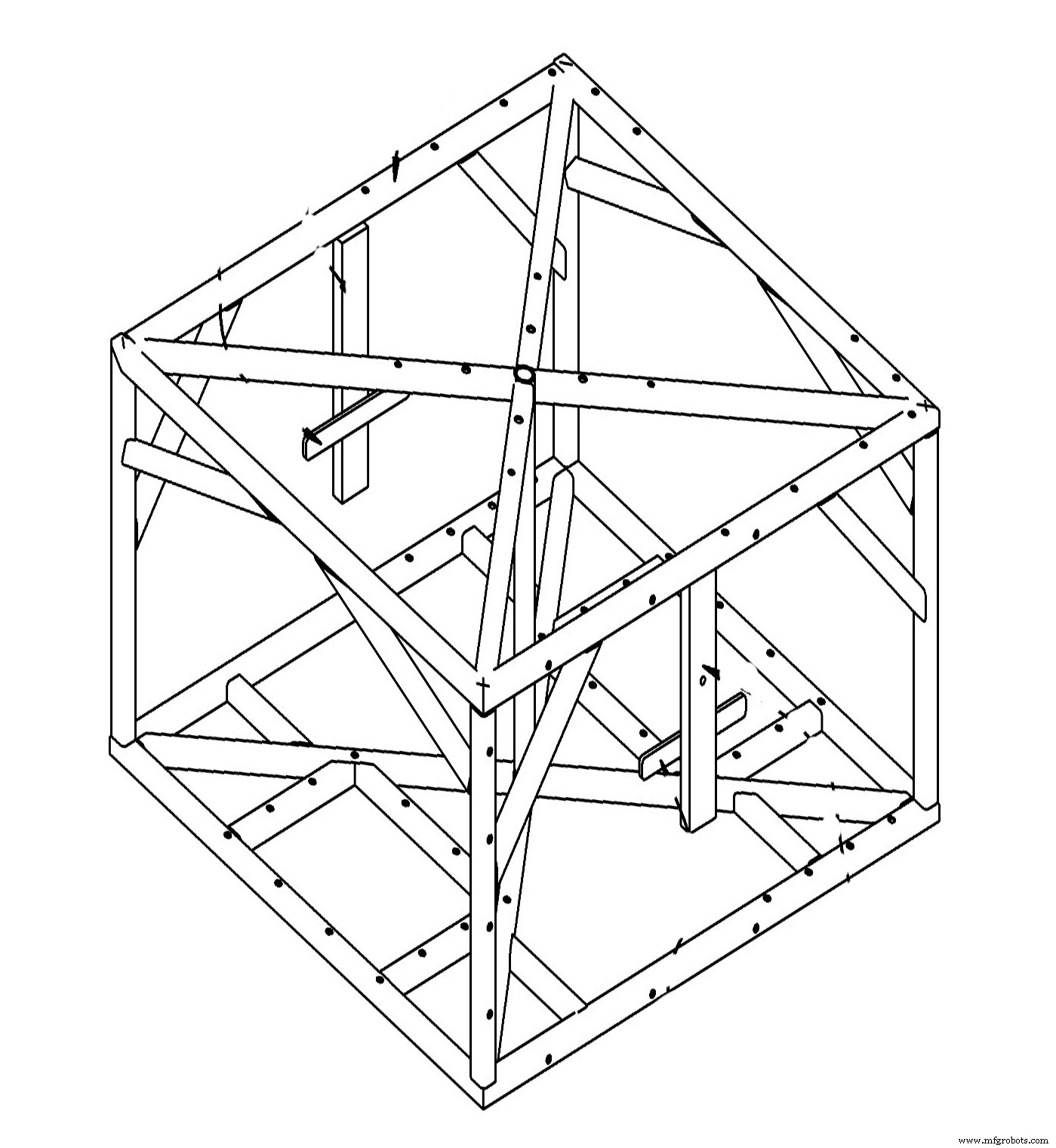
Der Rahmen sollte Platz und einen Mechanismus haben, um unten zwei Motoren und zwei Lenkrollen zu montieren. Innerhalb der Struktur sollte sich ein Mechanismus zum Verriegeln der Blei-Säure-Batterie befinden. In unserem Roboter haben wir Verkleidungsbretter verwendet, um den Rahmen abzudecken.
Die Drähte der beiden Motoren sind mit den Ausgangspins des Motortreibers verbunden. Dieses Verfahren ist leicht im Internet zu finden, daher soll es nicht das gesamte Verfahren beschreiben.
Der Schaltplan der elektronischen Steuerung ist als letztes beigefügt. Kanal 1 - Kanal 4 PWM-Signalpins des RC-Empfängers werden von Pin 18 - 21 mit der Arduino-Platine verbunden. Jeder Kanal wird im Code wie folgt konfiguriert. Sie können es nach Belieben ändern.
- Kanal 1 - UV-Schalter
- Ch 2 - Roboter-Scharfschaltungsschalter
- Ch 3 - Vorwärts-/Rückwärts-Bewegungsbefehle
- Ch 4 - Links-/Rechts-Abbiegebefehle
Dies kann auch beim Erstellen des GCS geändert werden.
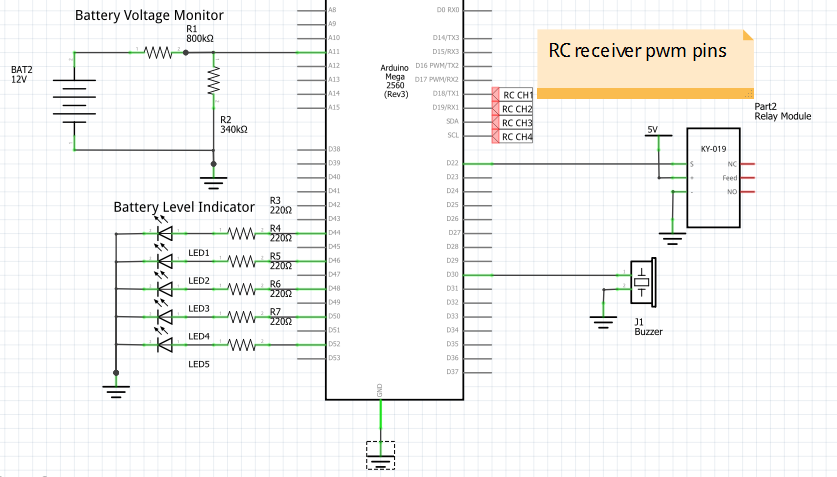
Die Pins des Motortreibers sind mit Arduino Pin 3 - 11 verbunden, wie im Schaltplan gezeigt.
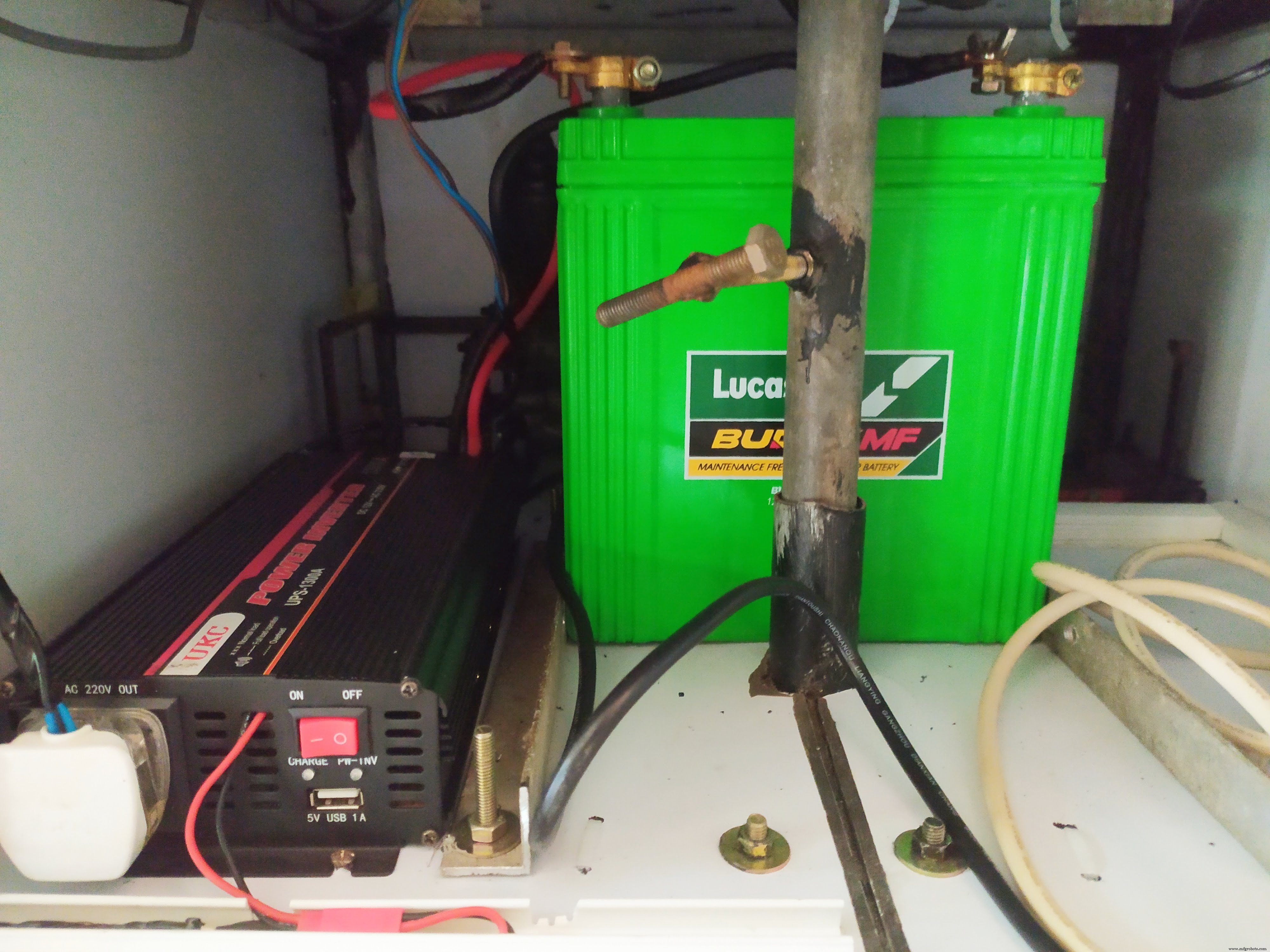
Um die 12 V in 230 V AC umzuwandeln, um die UV-Leuchten mit Strom zu versorgen, wird hier eine Wechselrichterschaltung verwendet. Wir haben eine handelsübliche Wechselrichtereinheit mit eingebautem Ladegerät gekauft. Dies trägt dazu bei, die Komplexität des elektronischen Systems zu vermeiden, indem wir die Blei-Säure-Batterie über die vorhandenen Steckdosen aufladen können.

In unserem Fall haben wir einen modifizierten Sinus-Wechselrichter verwendet, der einen Wirkungsgrad von etwa 70 % hat. Um alle elektronischen Vorschaltgeräte mit einem Wirkungsgrad von 70 % zu betreiben, beträgt die erforderliche Wattleistung des Wechselrichters 470 W. Mit allen Sicherheitsmargen haben wir einen 1-kW-Wechselrichter gekauft.,
Batterieklemmen werden an den 12-V-Eingang angeschlossen und E.-Vorschaltgeräte werden an die AC-Ausgangsports angeschlossen. Der Ein-/Ausschalter ist entfernt. Es sind 3 Drähte im Schalter verfügbar; gemeinsames Kabel, Erdungskabel und das eingeschaltete Kabel. Diese 3 Drähte werden wie folgt mit dem Relaisschalter verbunden, um die UV-Lichter von der Arduino-Platine zu steuern.
- Gemeinsames Kabel -> Gemeinsames
- Massedraht -> NC
- Kabel einschalten -> NEIN
Wir haben einen System-Power-On-Schalter, einen UV-Power-On-Schalter und einen Not-Aus-Schalter eingebaut, um den Roboter den Industriestandards zu entsprechen.
Bau des UV-Lichtturms
Der mittlere Teil des Turms enthält ein Aluminiumblech. Ein Blech wird zu einem Zylinder mit einem Durchmesser von 15 cm gerollt. Auf der Ober- und Unterseite des Zylinders werden zwei kreisförmige Verkleidungsbretter mit einem Durchmesser von 30 cm aufgelegt. Diese werden als UV-Lampenhalter verwendet. Beide Verkleidungsplatten sind 19 mm Löcher gebohrt, um das UV-Licht zu passen. E.Vorschaltgeräte werden mit doppelseitigen Klebebändern im Aluminiumzylinder befestigt.


Das FPV-Kamerasystem wird oben auf dem Turm montiert und zwei Drähte werden durch den Zylinder nach unten geführt.
Bau der Bodenkontrollstation

Im Folgenden sind die für die Ground Control Station (GCS) erforderlichen Komponenten aufgeführt.
- 2,4 GHz 4Ch RC-Sender
- FPV-Bildschirm
- 2 X Kippschalter
- 1 X Netzschalter
- 18650 Batteriezellen
- 3-Zellen-Batteriemanagement-Systemmodul für 18650
- 12V, 5A Schaltnetzteil
Rc-Sender enthält 2 Joysticks und mehrere Schalter. Hier gilt unser Interesse nur einem Joystick, der Schaltung und der Anzeige-LED. Entfernen Sie das Gehäuse des Senders und beobachten Sie, wie die Joysticks von der Schaltung erfasst werden. Jeder Joystick enthält zwei Potentiometer, die mit der Platine verbunden sind. Basierend auf der Position des Joysticks ändert das Potentiometer seinen Widerstand, sodass die Schaltung die Position des Joysticks lesen kann.
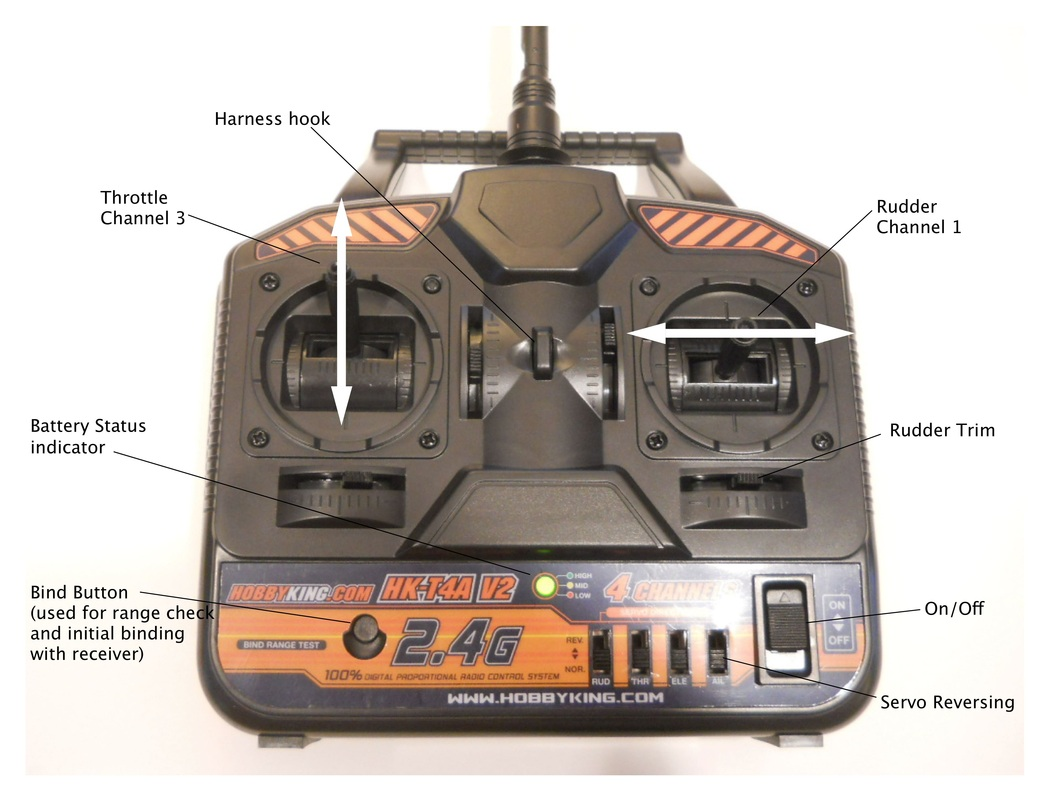
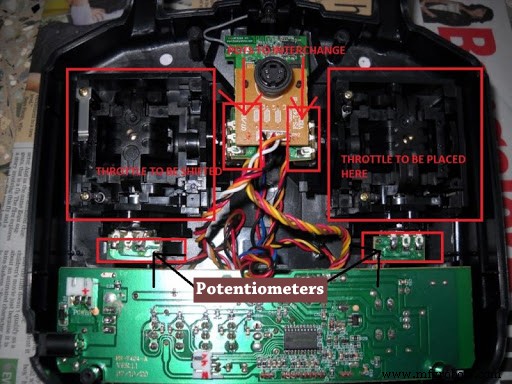
Entfernen Sie einen Joystick und seine zwei Potentiometer. Löten Sie die jeweiligen Drahtenden an die beiden Kippschalter. Jetzt haben wir einen Joystick und zwei Kippschalter, um alle 4 Kanäle zu steuern. Ein Schalter fungiert als Roboter-Scharfschaltungsschalter und der andere als UV-Licht-Steuerungsschalter. Die Anzeige-LED kann als Batterieüberwachung des GCS verwendet werden, da sie ihre Farbe auf Rot ändert, wenn die Batterie schwach ist.
Jetzt müssen wir eine Stromversorgung für den Sender und für den FPV-Bildschirm herstellen. Die Zellspannung einer 18650er Batterie beträgt 3,7V. Bei voller Ladung wird es 4,2 V. Dazu schalten wir 3 Zellen in Reihe um ca. 12V zu erhalten. In unserem Fall haben wir Zellen mit einer Kapazität von 1000mAh verwendet. Um die Laufzeit des GCS zu erhöhen, haben wir 9 Batterien, 3 in Reihe geschaltete Zellensätze parallel verwendet, um eine Kapazität von 3000 mAh zu erhalten. Dann das BMS-Modul anschließen, um die Batterie zu schützen.
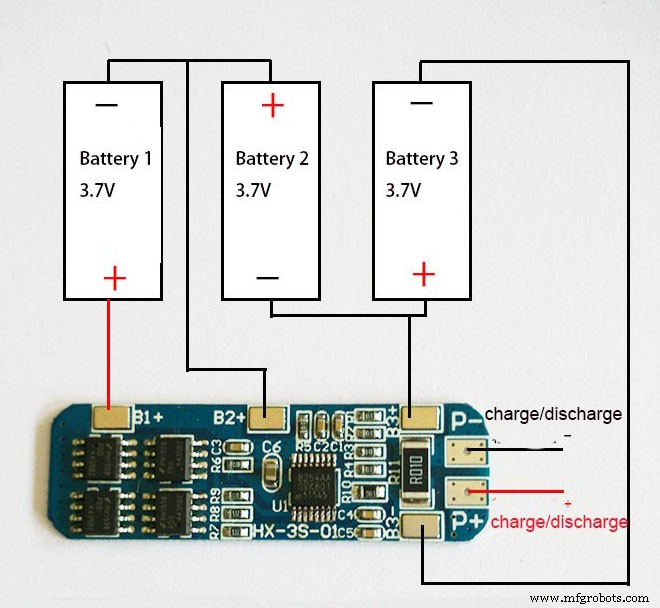
P+ und P- sind mit dem Stromeingang des Senders und dem Stromeingang des FPV-Bildschirms verbunden. Das 12V Schaltnetzteil (SMPS) wird mit einem Potentiometer geliefert, um die Ausgangsspannung in einem begrenzten Bereich einzustellen. Stellen Sie ihn auf 12,8 und verbinden Sie den Spannungsausgang mit P+ und P- des BMS. Dies hilft beim Aufladen des Akkus, wenn das SMPS angeschlossen ist.
Sie können dafür ein Gehäuse nach Ihren Wünschen gestalten.
Codierung
Die erste Aufgabe des Codes besteht darin, die RC-Kanaleingänge zu lesen. Da wir einen PWM-Empfänger verwenden, habe ich Interrupts verwendet, um die PWM-Werte zu lesen. Um es einfacher zu machen, habe ich eine PWM-Bibliothek eingefügt, um Interrupts zu verwenden, indem ich den angeschlossenen Pin wie folgt definiere.
PWM ch1(18); // Pin 18 für Eingang einrichten
PWM ch2 (19); // Pin 19 für Eingang einrichten
PWM ch3 (20); // Pin 20 für Eingang einrichten
PWM ch4 (21); // Pin 21 für Eingang einrichten In der Startsequenz überprüft der Code die Batteriespannung und ob der UV-Schalter eingeschaltet ist. Wenn eines von beiden erkannt wird, wartet die Startprozedur dort, bis alle behoben sind.
// Batteriespannung prüfen
battery_volt_monitor();
while(batterylow ==true){
Batterie_Spannung_monitor();
low_battery_notification();
}
//überprüfe, ob der UV-Schalter ausgeschaltet ist
rc_read();
while(uv_pwm> switch_on_pwm){
rc_read();
uv_on_warning_at_startup(); //Summerton
} Beim Betrieb der Motoren fällt die Batteriespannung nur für diesen Moment kritisch ab. Um zu vermeiden, dass der Unterspannungsalarm jedes Mal ausgelöst wird, wenn wir den Roboter bewegen, läuft die Batterieüberwachung nur, wenn sich der Roboter nicht bewegt.
if (robot_moving ==false){
battery_voltage_monitor(); //Überwache den Akku, wenn sich der Roboter nicht bewegt
} Alle anderen Funktionen einschließlich der Steuerung des Motortreibers, der Tonerzeugung mit Summer und der Steuerung des Relais funktionieren wie gewohnt. Sie können einem allgemeinen Tutorial zu den oben genannten Themen folgen, wenn Sie sich dessen nicht bewusst sind.
Betriebsverfahren
Einschaltvorgang
GCS-Controller
1. Schalten Sie den Hauptschalter ein.
2. Stellen Sie sicher, dass sowohl der Roboterarmierungsschalter als auch der UV-Lichtschalter ausgeschaltet sind. (In der unteren Position).
Roboter
1. Schalten Sie den Netzschalter ein.
2. Warten Sie auf den Startton.
3. Warten Sie auf den OK-Ton des Systems.
Steuerung des Roboters
1. Schalten Sie den Roboter-Scharfschaltungsschalter ein.
2. Bewegen Sie den Joystick, um den Roboter zu bewegen.
3. Schalten Sie den UV-Schalter ein, um die UV-Lichter einzuschalten. Wenn sich der Roboter-Scharfschaltungsschalter in der Aus-Position befindet, funktioniert der UV-Schalter nicht.
Akkustandsanzeige
1. Stellen Sie sicher, dass die Batterie mindestens 4 Balken blinkt, um den Roboter zu betreiben.
2. Wenn die Batterie schwach ist, piept der Summer und die letzten beiden Balken der Batteriestandsanzeige blinken.
Aufladeverfahren
1. Schalten Sie den Roboter aus.
2. Schalten Sie das GCS aus.
3. Schließen Sie den Wechselrichter an eine Steckdose an. (Normalerweise haben Wechselrichter eine eingebaute Ladezustandsanzeige)
Allgemeine Überlegungen
1. Verwendung in überfüllten Bereichen
Ultraviolettes Licht ist schädlich für menschliche Augen und Haut. Das Aussetzen des Lichts in kurzer Entfernung (weniger als 3 m) für mehr als 60 Sekunden kann die Augen schädigen und Hautreizungen verursachen. Jedoch können ultraviolette Strahlen kein festes Medium durchdringen. Das Betrachten des UV-Lichts durch ein transparentes Glas hat keinen Einfluss auf die menschlichen Augen oder den Körper.
2. Empfindliche Materialien und Geräte
Weiche Kunststoffe sind sehr empfindlich gegenüber ultraviolettem Licht. Weiche Kunststoffe werden häufig in Spielzeug und Lebensmittelverpackungen verwendet. Daher kann das Gerät nicht in Spielwarenläden, Supermärkten und dort, wo die oben genannten Artikel erhältlich sind, verwendet werden. Die UV-Lichter können jedoch verwendet werden, um Böden der oben genannten Bereiche zu desinfizieren.
3. Einsatzmöglichkeiten in Krankenhäusern
In Krankenhausumgebungen ist UV-Licht hilfreich, um Oberflächen mit hoher Berührung innerhalb kürzester Zeit zu desinfizieren. In diesem Szenario sollte jedoch die Wirksamkeit des UV-Lichts für medizinische Geräte und Medikamente berücksichtigt werden.
Medizinische Geräte mit Kunststoffgehäusen werden aus harten Kunststoffen hergestellt, da sie während des Herstellungsprozesses einer Strahlenbehandlung unterzogen werden. Darüber hinaus gibt es keine nachgewiesenen Effekte für die Wirksamkeit des UV-Lichts für die in Krankenhäusern gelagerten Medikamente.
Darüber hinaus können alle medizinischen Geräte aus Edelstahl und N95-Masken mit demselben Gerät sterilisiert werden.
4. Wirksamkeit für die schattierten Bereiche
Ultraviolettes Licht wird von Oberflächen genauso reflektiert wie sichtbares Licht. Daher erhalten die Bereiche, die kein direktes UV-Licht erhalten, das reflektierte UV-Licht. Stark bedeckte oder schattige Bereiche erhalten jedoch kein wirksames UV-Licht. Diese Bereiche werden auch nicht mit Desinfektionsflüssigkeiten desinfiziert.
5. Andere Überlegungen
UV-Licht erzeugt Ozon, wenn längere Zeit in geschlossenen Umgebungen gearbeitet wird. Als allgemeine Praxis werden alle geschlossenen Umgebungen 20 Minuten lang belüftet, nachdem sie mit UV-Licht sterilisiert wurden.
Code
Code für Arduino Mega
https://github.com/tharindusuraj/Ultraviolet-Germicidal-RobotSchaltpläne
uv-x_Q9R5T59Q32.fzzHerstellungsprozess
- Ein mobiler Roboter mit visueller Hindernisvermeidung
- Raspberry Pi Webcam-Roboter – Bestes Video-Streaming-Tutorial
- Webgesteuerter Raspberry Pi-Roboter mit Video
- Recycling-Sortierroboter mit Google Coral
- Hindernisse vermeiden Roboter mit Servomotor
- Automatisches Pflanzenbewässerungssystem mit Arduino
- US-Nationalhymne mit Licht und Ton
- Steuern Sie den Arduino-Roboterarm mit der Android-App
- Video:In-Prozess-Scannen eines gedrehten Profils – per Roboter
- Drehzentrum mit Roboterarm ausgestattet