


3D-gedruckte Handprothese mit kapazitiver Berührungserkennung
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
| × | 1 | ||||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
Apps und Onlinedienste
 |
|
Über dieses Projekt
In diesem Projekt bin ich auf eine Idee gekommen, die auf bestehende 3D-gedruckte Handprothesen umgesetzt werden kann. In bestehenden elektrisch betriebenen Prothesen konnte ich keine kapazitive Berührungssensortechnologie finden zur Betätigung von Fingern . Dieses Projekt kombiniert zwei sehr coole Dinge, Arduino mit kapazitiver Berührungserkennung für die Betätigung und Remix von e-NABLE Phoenix Hand Design.
Grundsätzlich ist die Phoenix-Hand eine körperbetriebene Hand. Bei diesem Projekt habe ich es in eine elektrisch betriebene Prothese umgewandelt, indem ich das erforderliche Teiledesign ausgewählt habe.
Der Vorteil der kapazitiven Berührungserkennung besteht darin, dass Sie die Finger durch Berührung leicht betätigen können. Derzeit kann dieses Modell keine einzelnen Finger kontrollieren und es ist mehr Entwicklung in Bezug auf die Tragfähigkeit und Greiffähigkeit erforderlich.
Sammle die Teile:
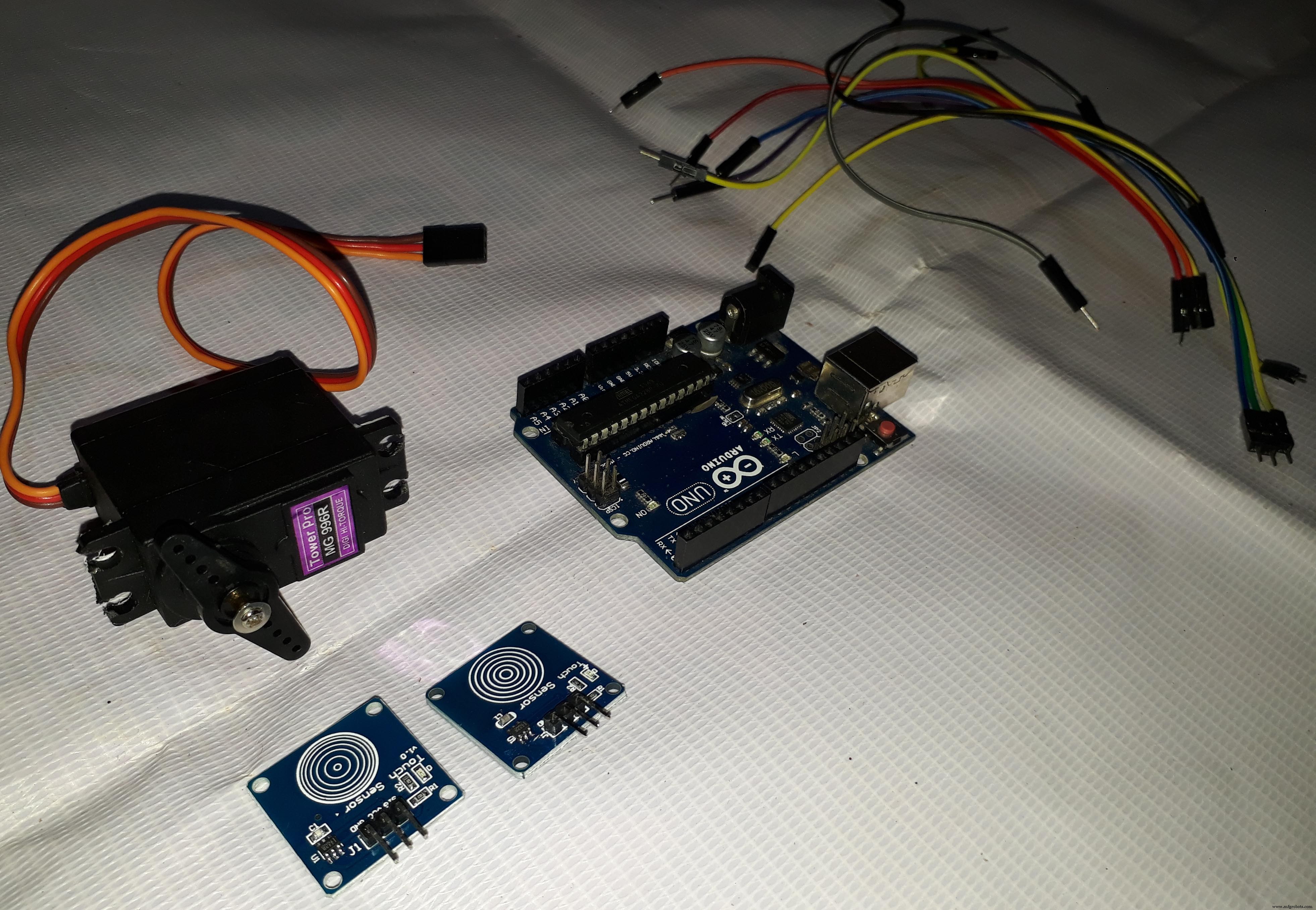
- Arduino Uno
- TTP223 Berührungssensor -2
- MG996R Servomotor
Versammlung der Phönixhand:
Die Montagedetails von Phoenix Hand werden in den folgenden Schritten erwähnt...
Ich habe Flexor als Angelschnur verwendet und Extensor als Gummibänder
Tools:
- 3D-Drucker
- Klebepistole
Drucken der Hand:
Dieses Projekt verwendet zuvor entworfene e-NABLE Phönixhand .
Gemäß meinen Anforderungen habe ich nur die folgenden Teile gedruckt
Finger
- finger_phalanx.stl -4 Stück
- fingertip_long.stl -2 Stück
- fingertip_short.stl -2 Stück
- thumb_phalanx.stl -1 Stück
- thumbtip.stl -1 Stück
Palm
- palm_right_new_supports.stl -1 Stück
Snap-Pins
- fingertip_pin.stl - 4 Stück
- knuckle_pin_long.stl -1 Stück
- knuckle_pin_short.stl -2 Stück
- thumb_knuckle_pin.stl - 1 Stück
- thumbtip_pin.stl - 1 Stück
Da es bereits eine detaillierte Anleitung zum Bauen gibt, gehe ich nicht ins Detail
Zum Drucken habe ich einen Flsun 3D-Drucker verwendet. Insgesamt hat das Drucken 10-12 Stunden gedauert
(Hinweis:Diese Teile sind für eine rechte Hand)
Montage der Hand:
Der Build-Prozess von Phoenix Hand ist bereits verfügbar, daher werde ich nicht zu sehr ins Detail gehen. Wenn Sie Zweifel haben, hinterlassen Sie bitte einen Kommentar.
Ich habe Flexor als Angelschnur und Extensor als Gummiband verwendet.
** Für eine reibungslose Passform kann eine gewisse Glättung erforderlich sein
Elektronische Teile:
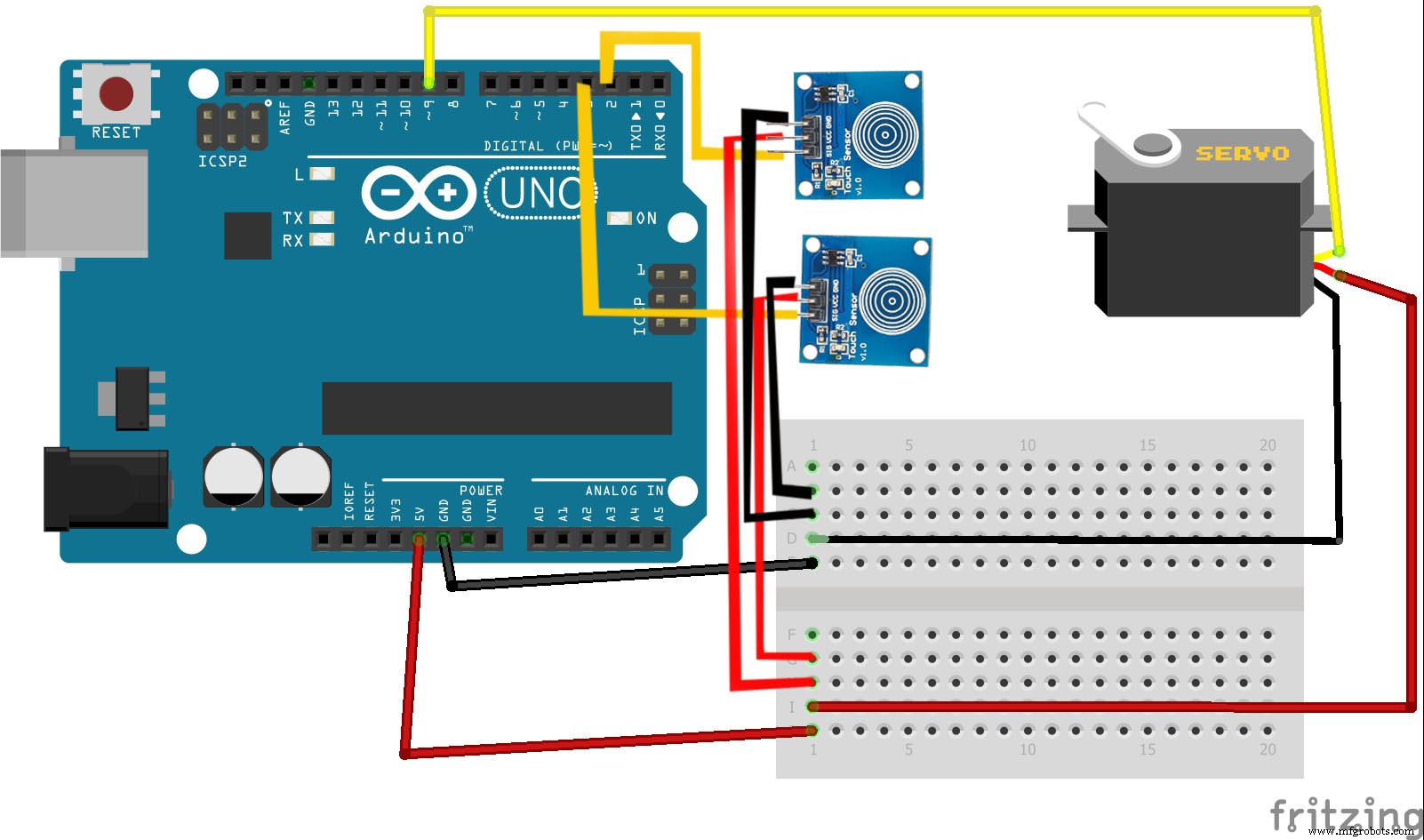
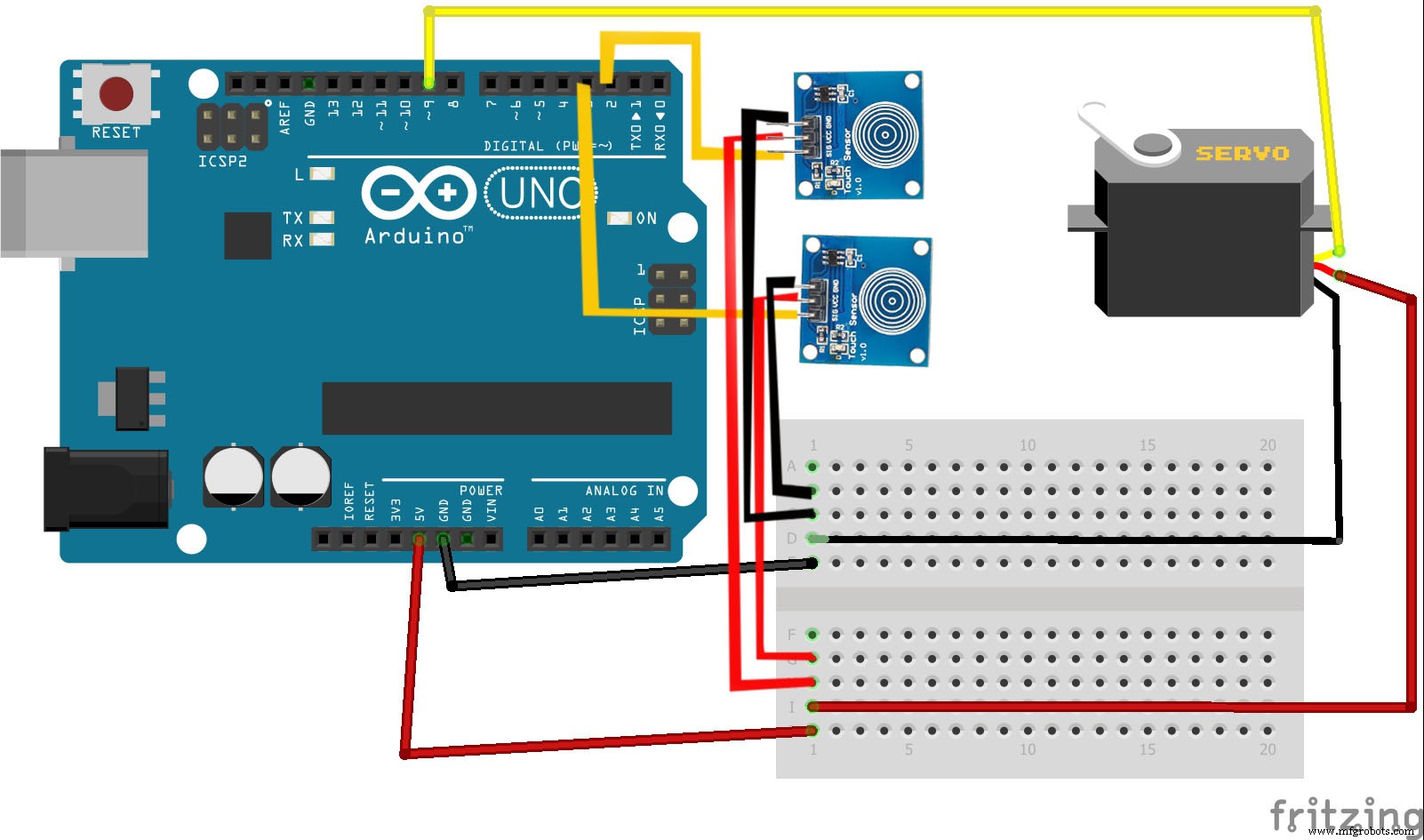
Die Betätigung wird über 2 Berührungssensoren (TTP223) gesteuert. Der Eingang vom Berührungssensor öffnet und schließt die Finger durch einen Servomotor.
Schaltplan und Arduino-Code:
Glücklich machen!
Vielen Dank fürs Lesen, wenn Sie weitere Informationen benötigen, können Sie gerne in den Kommentaren fragen, und ich werde mein Bestes tun, um Ihnen zu antworten.
Code:
#include Servo myservo; #define CTS1Pin 2 // Pin für kapazitiven Berührungssensor 1 #define CTS2Pin 3 // Pin für kapazitiven Berührungssensor 2int pos;void setup () { myservo.attach (9); // verbindet das Servo an Pin 9 mit dem Servoobjekt}void loop () {int CTSValue1 =digitalRead (CTS1Pin);int CTSValue2 =digitalRead (CTS2Pin); if (CTSValue1 ==HIGH) { für (pos =0; pos <=180;pos +=1) myservo.write(pos); Verzögerung (15); } if(CTSValue2==HIGH) { for (pos =180; pos>=0; pos -=1) myservo.write(pos); Verzögerung (15); }} Code
- Arduino-Skizze
Arduino-SkizzeArduino
#includeServo myservo; #define CTS1Pin 2 // Pin für kapazitiven Berührungssensor 1 #define CTS2Pin 3 // Pin für kapazitiven Berührungssensor 2int pos;void setup () { myservo.attach (9); // verbindet das Servo an Pin 9 mit dem Servoobjekt}void loop () {int CTSValue1 =digitalRead (CTS1Pin);int CTSValue2 =digitalRead (CTS2Pin); if (CTSValue1 ==HIGH) { for (pos =0; pos <.) =180;pos +=1) myservo.write(pos); Verzögerung (15); } if(CTSValue2==HIGH) { for (pos =180; pos>=0; pos -=1) myservo.write(pos); Verzögerung (15); } }
Schaltpläne
Herstellungsprozess
- Leiterplatte
- Endbearbeitung von 3D-gedruckten Teilen mit… Buntstiften?
- Einführung in kapazitive Beschleunigungsmesser:Beschleunigungsmessung mit kapazitiver Sensorik
- 3D-gedruckte Prothetik ist die Zukunft
- Divide By Zero präsentiert DIY-3D-gedruckte Karten mit Google Maps
- Bessere Qualitätskontrolle mit 3D-gedruckten Teilen
- Schnallen Sie sich an mit funktionalen 3D-gedruckten Teilen!
- Supply Chain Transformation mit menschlicher Note
- Standard-Drehmaschine mit Touchscreen-Steuerung
- Universelle taktile Sensorik mit elektromechanisch gekoppelten Leitern