


Solo Servo Sweep
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
| > |
| × | 1 | |||
| × | 1 | ||||
| × | 1 |
Über dieses Projekt
Einführung
Solo hat eine großartige Entwicklungsumgebung, aber es fehlt an I/O. Derzeit umfasst der Zubehöranschluss CAN, Mavlink Serial to Pixhawk und USB to Sololink (imx6). Durch die Verwendung eines Arduino und Firmata können benutzerdefinierte Sensoren, Servos, Blink-LEDs oder jede andere Arduino-Funktion hinzugefügt werden.
Dieses Tutorial führt Sie durch die Schritte zur Verwendung eines Arduino mit Solo zur Steuerung eines Servos.
Softwarevoraussetzungen:
- Solo-Update 1.2.0 oder höher
- Arduino-IDE
- Filezilla
- Putty oder ein anderer SSH-Client
Schritt 1:Firmata-Host auf Arduino Uno hochladen
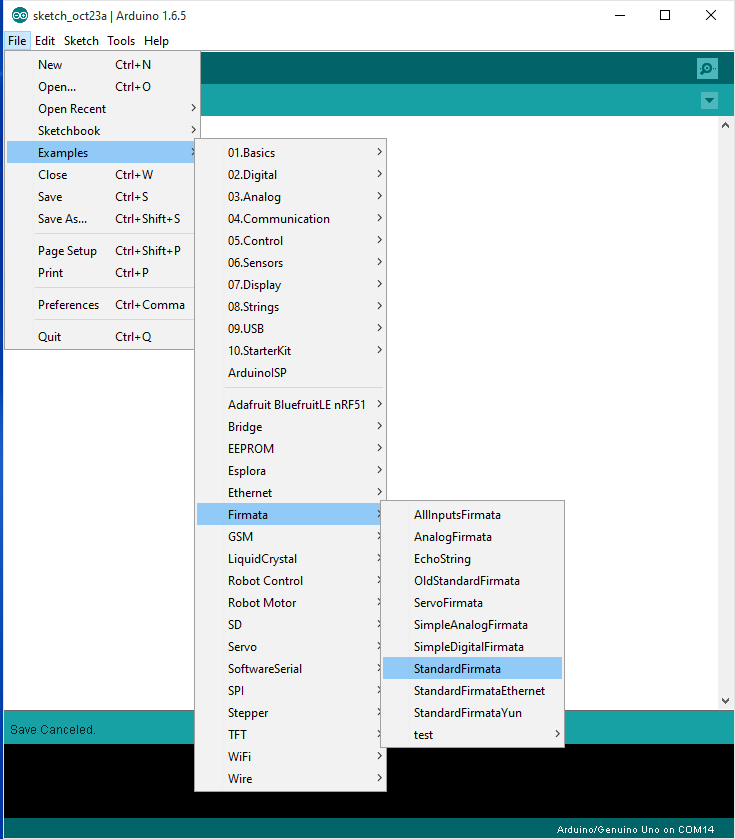
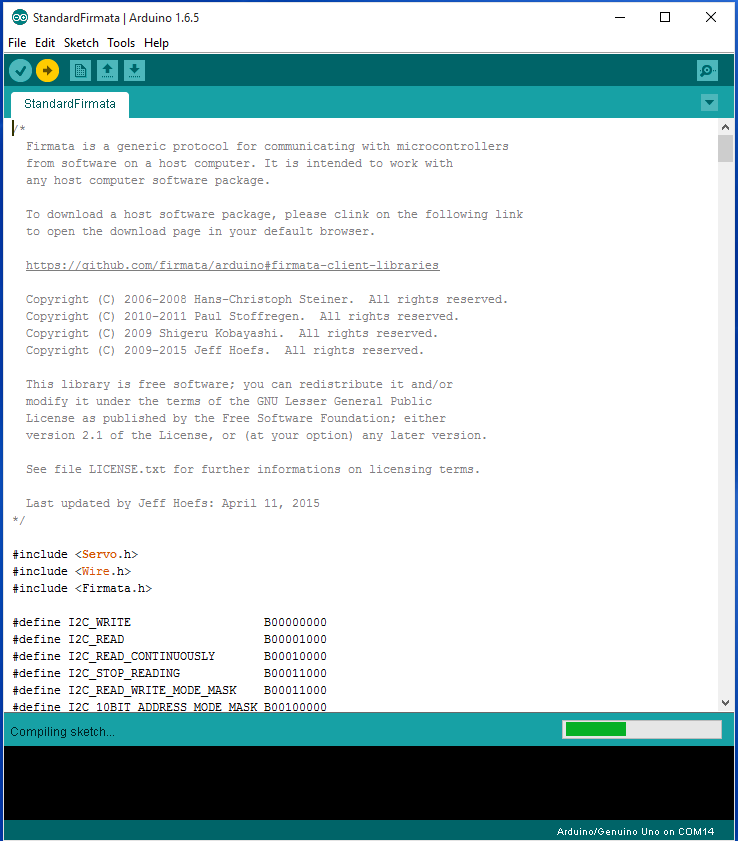
Öffnen Sie StandardFirmata über die Registerkarte Beispiele. Wählen Sie Platine und Port aus. Hochladen!
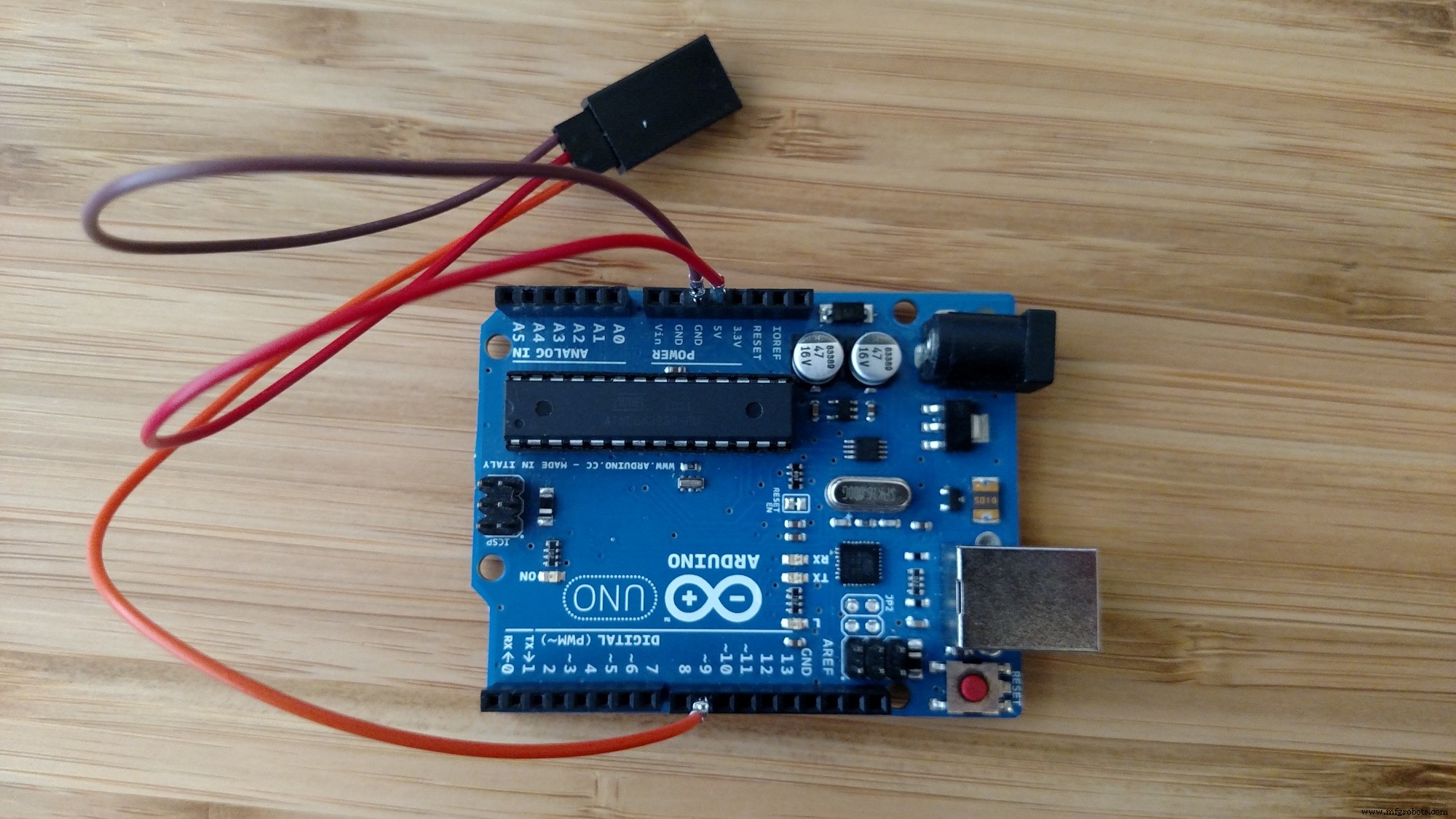
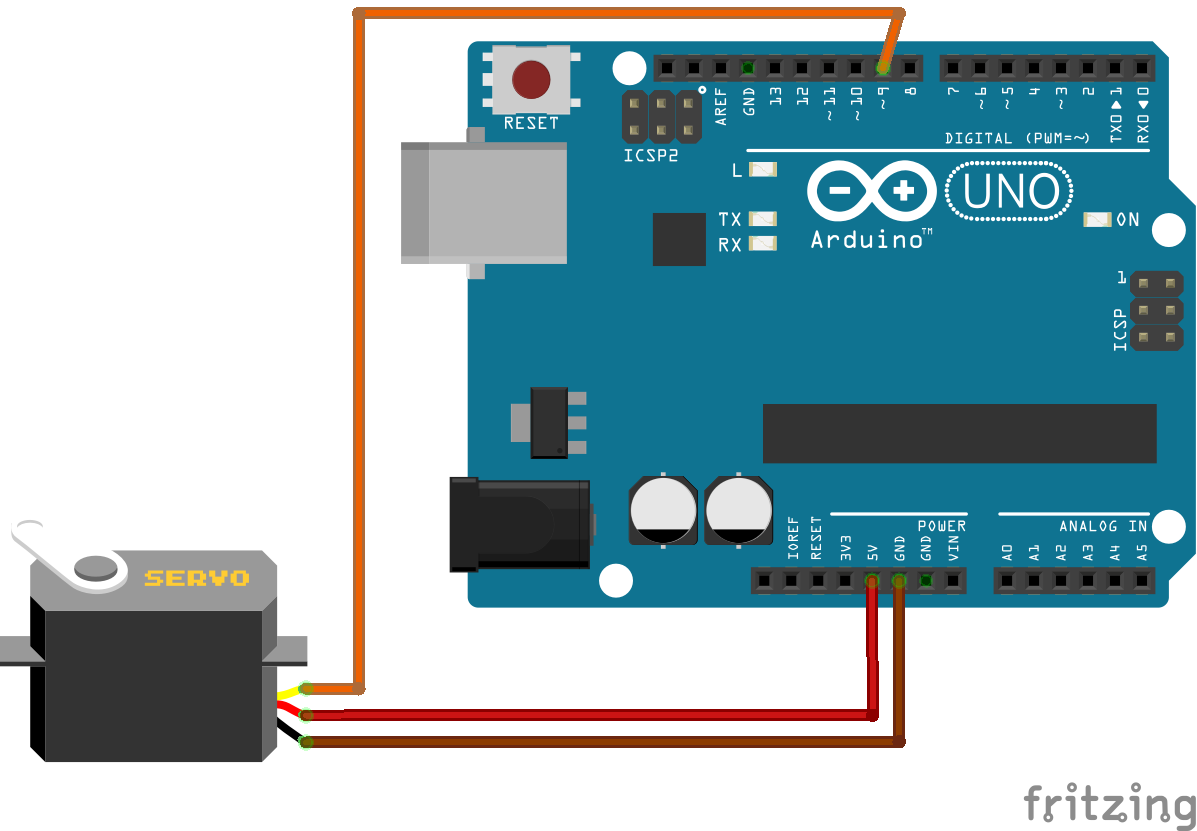
Schritt 2:Hardware-Setup
Teile



Hinweis:Das Breakout-Board wird derzeit nicht verkauft. Bitte lesen Sie hier
Montage
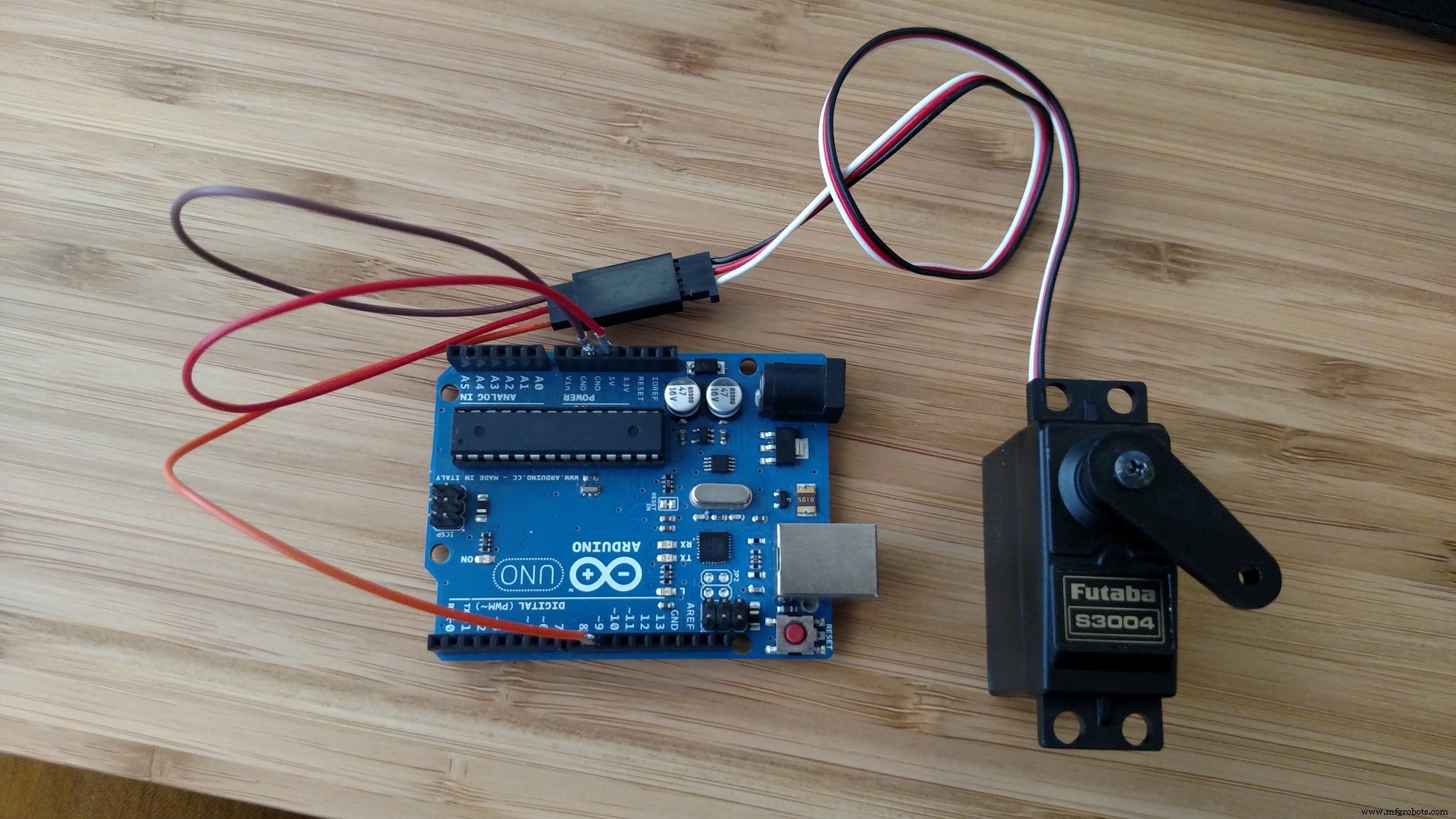



Einschalten

Schritt 2:pyMata und Code herunterladen
pyMata
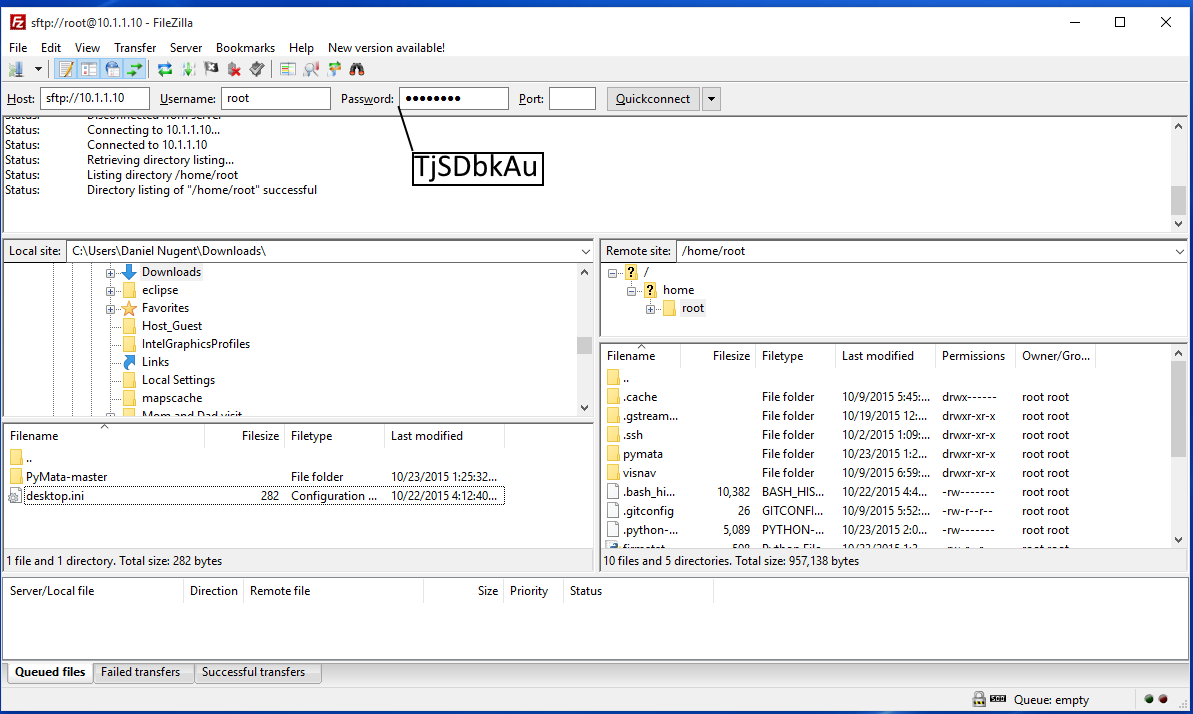
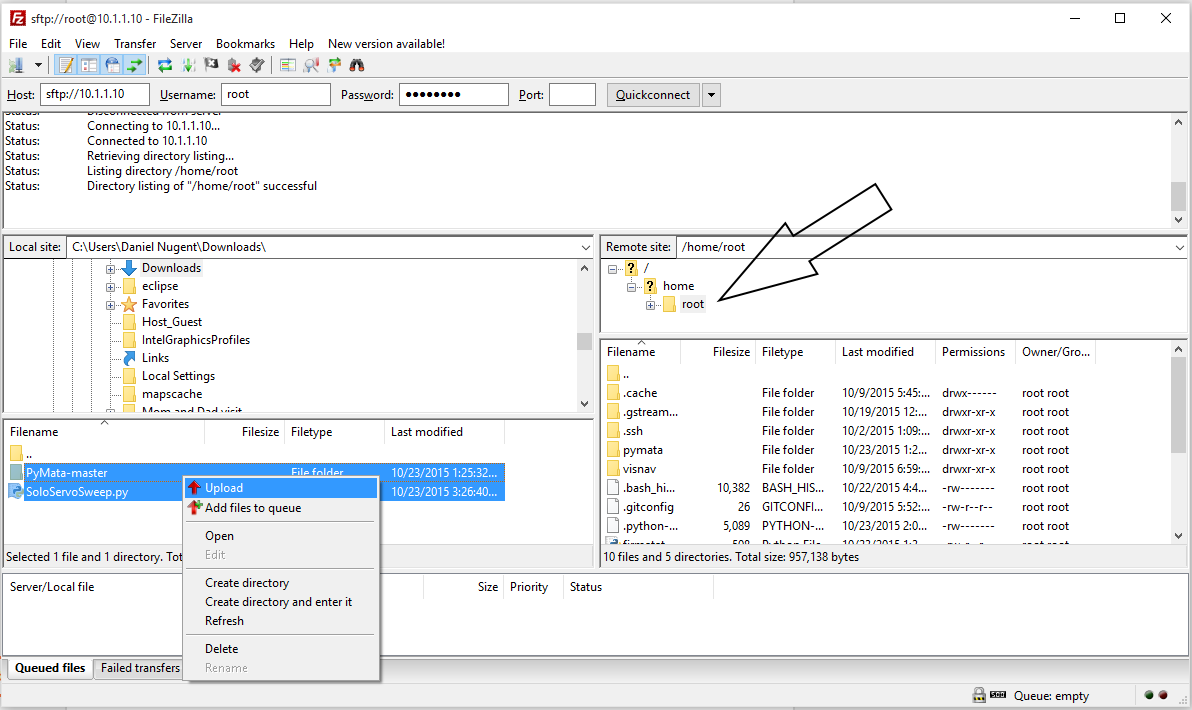
SoloServoSweep.pySchritt 3:Dateien auf Solo übertragen
- Verbinde dich mit dem Wifi-Netzwerk deines Solos!
Schritt 4:SSH in Solo
SSH in Solo mit dem SSH-Client Ihres Betriebssystems. Für Windows verwenden wir Putty.
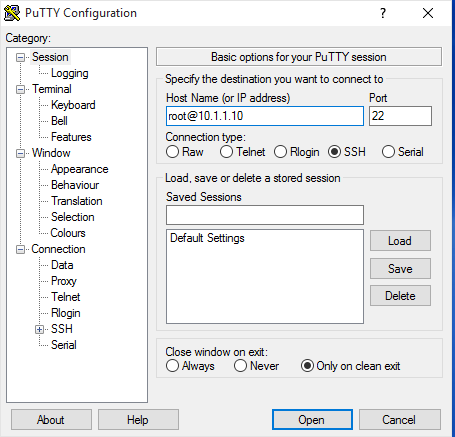
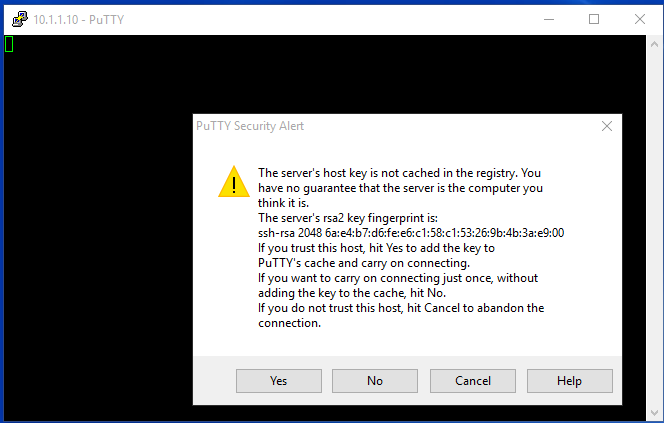
Stellen Sie sicher, dass Sie immer noch mit Solos Wifi verbunden sind!
Weitere Informationen finden Sie in den Bildunterschriften
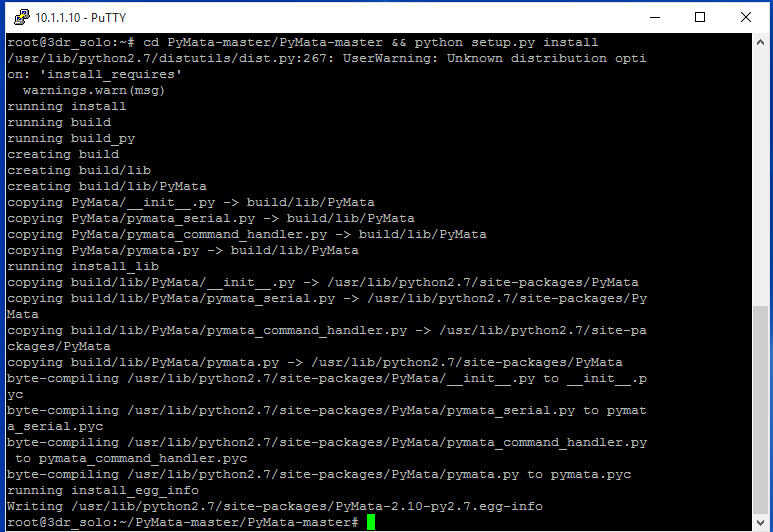
Schritt 5:pyMata installieren
Führen Sie diesen Befehl in Ihrer SSH-Sitzung aus:
Dies sollte Ihr Ergebnis sein
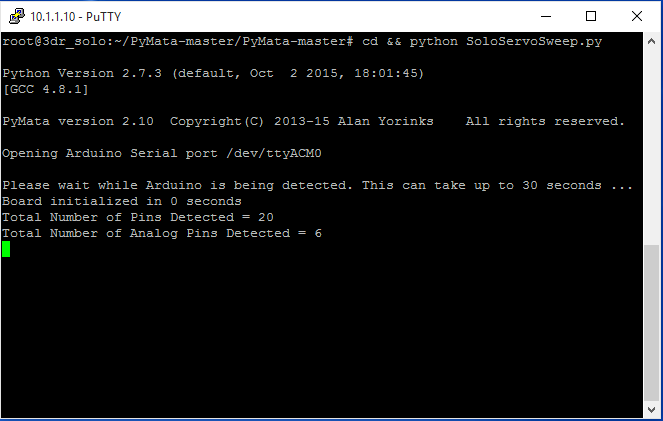
Schritt 7:Führen Sie das Beispiel aus
Während Ihre ssh-Sitzung noch geöffnet ist, führen Sie Folgendes aus:
Code
- SoloServoSweep.py
SoloServoSweep.pyPython
Fahren Sie ein Servo in Python von Solovon PyMata.pymata import PyMataimport timeimport sysSERVO_MOTOR =9 # Servo an diesem Pin angeschlossenEND =170 # Max Servoweg# Create a PyMata instanceboard =PyMata("/dev/ttyACM0")# Configure Pin as servoboard.servo_config(SERVO_MOTOR)try:while True:für i im Bereich (0,END):# Sweep up board.analog_write(SERVO_MOTOR, i) time.sleep(.015) für i im Bereich (END,0,- 1):# Sweep down board.analog_write(SERVO_MOTOR, i) time.sleep(.015)außer KeyboardInterrupt:board.close() sys.exit() Kundenspezifische Teile und Gehäuse
Solo-Breakout-Board
Breakout-Board für 3DR Solo-Zubehöranschlusshttps://github.com/3drobotics/Pixhawk_OS_Hardware/tree/master/Accessory_Breakout_X1Schaltpläne
Herstellungsprozess