


Roboter-Postprozessoren:Alles, was Sie wissen müssen
Sie wissen nicht, welchen Postprozessor Sie wählen sollen? Hier sind 5 Schritte zur Auswahl des perfekten Roboter-Postprozessors.
Postprozessoren sind die Brücke zwischen der Offline-Programmiersoftware und Ihrem Roboter.
Wenn Sie den richtigen Postprozessor auswählen, wird Ihr Programm sofort einsatzbereit sein – der echte Roboter bewegt sich genauso wie in der Simulation. Wenn Sie jedoch den falschen Postprozessor auswählen, steht Ihnen eine schwierige Zeit bevor – der Roboter bewegt sich möglicherweise unregelmäßig, in die falsche Richtung oder überhaupt nicht.
RoboDK bietet viele verschiedene Postprozessoren zur Auswahl. Es lohnt sich, sich damit vertraut zu machen, wie Postprozessoren funktionieren, wie man den richtigen auswählt und wie man seinen eigenen Postprozessor anpasst oder erstellt, wenn die bereitgestellten nicht genau das Richtige für Sie sind.
In diesem Artikel erfahren Sie alles, was Sie über Roboter-Postprozessoren in RoboDK wissen müssen.
Was ist ein Postprozessor?
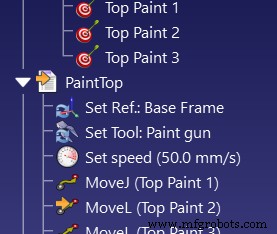
Die meisten Roboterprogramme enthalten dieselben grundlegenden Befehle, die immer wieder verwendet werden. Die drei häufigsten sind:
- Gelenk bewegen – Dadurch wird der Roboter zu einem Punkt im Raum bewegt, indem die Robotergelenke so schnell wie möglich in ihre gewünschte Position gebracht werden, was nützlich ist, wenn man sich durch den freien Raum bewegt.
- Linear verschieben – Dadurch bewegt sich der Roboter von der aktuellen Position zu einem Punkt im Raum, indem er einer genauen Linie folgt, was nützlich ist, wenn er sich bewegt, um ein Objekt, ein Gemälde usw. aufzunehmen.
- Geschwindigkeit einstellen — Dies definiert die Geschwindigkeit des Endeffektors und/oder der Gelenke des Roboters.
Offline-Programmiersoftware erstellt Programme mit einer verallgemeinerten Version dieser (und anderer) Befehle, die auf jeden Roboter anwendbar sind.
Roboter sprechen verschiedene Sprachen
Das Problem besteht darin, dass jeder Hersteller seine Befehle auf unterschiedliche Weise in seine Roboter einprogrammiert. Viele Hersteller haben ihre eigene benutzerdefinierte Programmiersprache und einige verwenden sogar leicht unterschiedliche Befehle für verschiedene Versionen ihrer Controller.
Beispielsweise werden die drei oben aufgeführten Befehle für verschiedene Robotersteuerungen ausgedrückt. In Klammern habe ich auch die Mindestanzahl an Parametern und Werten angegeben, die zur Steuerung eines 6DoF-Roboters erforderlich sind:
| Roboter | Gemeinsamer Umzug | Lineare Bewegung | Geschwindigkeit einstellen | Pfadrundung |
| ABB IRC5 | MoveJ (4) | MoveL (4) | Geschwindigkeitsdaten(4) | Zonendaten(4) |
| Fanuc RJ3 | J (2) | L (2) | Geschwindigkeit (1) | CNT (1) |
| Kawasaki | JMOVE (1) | LMOVE (1) | GESCHWINDIGKEIT (1) | GENAUIGKEIT (1) |
| KUKA KRC | PTP (1) | LIN/SPL (1) | $VEL.CP (1) | $APO.CDIS (1) |
| Motoman JBI | MOVJ (2) | MOVL (2) | VJ/V (1) | PL (1) |
| Universelle Roboter | movej (1) | bewegen/bewegen (1) | v(1) | r (1) |
Wie Sie sehen können, ist jeder Befehl für jeden Robotertyp ähnlich. Es gibt jedoch einen Unterschied in der Formulierung und in der Menge an Informationen, die erforderlich sind, um jede Anweisung zu definieren.
Ohne Offline-Programmierung und Postprozessoren müssten Sie jedes Mal, wenn Sie einen neuen Robotertyp programmieren, eine völlig neue Programmiersprache lernen. Dies verlangsamt die Roboterprogrammierung erheblich.
Postprozessoren machen es einfach
Postprozessoren arbeiten, indem sie die Befehle in ein spezifisches Programm für Ihr Robotermodell übersetzen.
Mit RoboDK müssen Sie keine Programmiersprache lernen, um Ihren Roboter zum Laufen zu bringen. Die bereitgestellten Postprozessoren reichen normalerweise aus, um verwendbaren, fehlerfreien Code für über 30 Robotermarken zu generieren.
Der Postprozessor generiert auch alle notwendigen Initialisierungscodes und Variablendefinitionen, deren Definition in der normalen textbasierten Programmierung oft lästig ist.
5 Schritte zur Auswahl des perfekten Postprozessors
RoboDK wird mit über 40 Postprozessoren geliefert. Sie müssen den richtigen Postprozessor für Ihre Robotersteuerung auswählen.
Wie wählen Sie zwischen ihnen aus?
Wenn Sie einen der Roboter aus unserer Roboterbibliothek verwendet haben, werden Sie feststellen, dass ein Postprozessor bereits als Standard ausgewählt ist. Dies setzt häufig voraus, dass Sie den neuesten (oder Standard-)Controller für diesen Roboter verwenden. Es kann jedoch vorkommen, dass Sie einen anderen auswählen müssen, wenn der Standard-Post nicht den Anforderungen Ihrer Anwendung oder Ihres Setups entspricht.

1. Wählen Sie den Postprozessor für Ihre Robotermarke
Normalerweise ist es am besten, zuerst den standardmäßigen oder einfachsten Postprozessor auszuprobieren.
Einige Robotermarken haben standardmäßig nur eine Option in RoboDK, z. Mecademic, Kawasaki, CLOOS usw. In diesem Fall ist Ihre Wahl sehr einfach.
2. Wählen Sie den Postprozessor für Ihren Controller aus
Einige Robotermarken haben unterschiedliche Postprozessoren für unterschiedliche Controller oder Versionen ihrer Programmiersprache. Zum Beispiel hat Denso einen Postprozessor für seine älteren RC7-Steuerungen und einen für seine neueren RC8-Steuerungen, da sie zwischen diesen Modellen von der Programmierung in der Programmiersprache PAC auf die Programmierung in PacScript umgestiegen sind.
Verwenden Sie den Postprozessor für Ihren spezifischen Controller, falls einer verfügbar ist. Wenn es für Ihren spezifischen Controller keine Option gibt, versuchen Sie es mit derjenigen, die der Versionsnummer Ihres Controllers am nächsten kommt.
3. Wählen Sie den Postprozessor für Ihre Anwendung aus
Einige Robotermarken haben ziemlich viele verschiedene Postprozessoren. KUKA hat 10!
Einige der zusätzlichen Postprozessoren sind für bestimmte Anwendungen oder Setups. Beispielsweise gibt es 5 Postprozessoren für die KUKA KRC2-Steuerung. Zwei davon sind für Anwendungen mit dem CamRob-Fräs-Add-On oder der KUKA CNC-Steuerung vorgesehen, die Tausende von Codezeilen in einer Programmdatei (geeignet für die Roboterbearbeitung) ermöglicht. Einer ist speziell für Lichtbogenschweißanwendungen. Ebenso gibt es einen UR-Postprozessor, der Robotiq-Greifer integriert.
Wenn es einen Postprozessor für Ihren Controller gibt, der für Ihre spezifische Anwendung oder Konfiguration geeignet ist, verwenden Sie ihn. Wenn es jedoch keinen für Ihre Anwendung gibt, verwenden Sie einfach den Basis-Postprozessor für Ihre Marke und Ihren Controller.
4. Wählen Sie den Postprozessor, den Sie einfach aktualisieren können
Manchmal ist das von RoboDK generierte Programm nicht genau das Richtige für Ihre Anwendung. Möglicherweise möchten Sie zusätzliche Codezeilen hinzufügen, um die Funktionalität zu erweitern. Dies ist sehr einfach, wenn Sie mit der Programmiersprache Ihres Roboters ein wenig vertraut sind.
Einige der Postprozessoren werden bereitgestellt, um das Ändern und Aktualisieren des generierten Codes zu vereinfachen.
Zum Beispiel hat der KUKA KRC2 Optionen, die eine DAT-Datei generieren. Diese sind ein interessantes Feature der KUKA Steuerung. In dieser Konfiguration werden Positionen als Variablen in einer separaten DAT-Datei gespeichert, was es manchmal einfacher machen kann, den Code zu aktualisieren, da Sie nur die Variablen ändern müssen, um die Positionen zu ändern.
Ähnlich gibt es zwei Siemens Sinumerik Postprozessoren:einen, wo die Positionen in Millimetern und der andere, wo sie in Zoll geliefert werden.
Wählen Sie den Postprozessor, der es Ihnen so einfach wie möglich macht, den Robotercode bei Bedarf zu aktualisieren.
5. Postprozessor erstellen oder anpassen
Unter bestimmten Umständen müssen Sie möglicherweise Ihren eigenen Postprozessor schreiben, z. B. wenn Sie Ihren Roboter in einer einzigartigen Konfiguration verwenden.
Möglicherweise möchten Sie auch einen vorhandenen Postprozessor für Ihre spezifische Einrichtung oder Anwendung anpassen.
Es ist sehr einfach, benutzerdefinierte Postprozessoren in RoboDK zu schreiben, da sie alle Python-Programme sind und in einem ähnlichen Format geschrieben sind.
Sie können in diesem Video ein einfaches Tutorial sehen, das zeigt, wie man einen Postprozessor erstellt oder aktualisiert.
Weitere Informationen finden Sie auf der Postprozessorseite in unserer Dokumentation.
Welche Fragen haben Sie zu Postprozessoren? Erzählen Sie es uns in den Kommentaren unten oder beteiligen Sie sich an der Diskussion auf LinkedIn , Twittern , Facebook oder Instagram .
Industrieroboter
- Cloud Computing:Alles, was Sie wissen müssen
- Container im Vergleich zu serverlosen; Alles, was Sie wissen müssen!
- Ausgelagerte Wartung auf einen Blick:Alles, was Sie wissen müssen
- Alles, was Sie über Pigmentdispersionen wissen müssen
- Kapazitätsplanungsstrategie – Alles, was Sie wissen müssen
- Alles, was Sie über IoT in der Instandhaltung wissen müssen
- 9 Schritte zum Schmieden eines Messers:Alles, was Sie wissen müssen
- Alles, was Sie über technische Zeichnungen wissen müssen
- Alles, was Sie über Metallguss wissen müssen
- Industrielle Kupplungsreparaturen:Alles, was Sie wissen müssen