


Top 10 Aufgaben für die Offline-Programmierung
Ist Ihre Aufgabe für die Offline-Programmierung geeignet? Wir sehen uns die 10 besten Roboteraufgaben an, die mit Offline-Programmiersoftware möglich sind.
Eine allgemeine Besorgnis über jede neue Technologie ist in der Frage enthalten:„Aber wird sie in meiner speziellen Situation funktionieren?“
Offline-Programmierung ist nicht anders. Obwohl die Leute die Vorteile recht schnell erkennen, befürchten sie manchmal, dass es für ihre spezielle Aufgabe nicht anwendbar ist. Wir verstehen ihre Sorge. Jedes Unternehmen ist einzigartig und es kann schwer zu sagen sein, ob eine Technologie wie die Offline-Programmierung am besten zu Ihnen passt.
Obwohl Ihre Situation einzigartig ist, gibt es Ähnlichkeiten zwischen Ihrer Roboteranwendung und anderen, die wir ständig sehen. Die Offline-Programmierung kann für viele Roboteraufgaben verwendet werden.
In diesem Artikel erklären wir, welche Faktoren bestimmen, ob Sie Offline-Programmierung verwenden können, und wir listen unsere 10 wichtigsten Aufgaben in RoboDK auf.
Was bestimmt, ob eine Aufgabe Offline-Programmierung verwenden kann
Wenn Sie eine Aufgabe mit einem Roboter ausführen können, können Sie ihn mit ziemlicher Sicherheit auch mithilfe der Offline-Programmierung programmieren. Es gibt jedoch einige Faktoren, die bestimmen, wie einfach (oder schwierig) es sein wird, die Programmierung durchzuführen.
Fünf wichtige Faktoren sind:
- Softwarefunktionalität — Nicht alle Offline-Programmiersoftware ist gleich. Einige Pakete werden von bestimmten Roboterherstellern geliefert, sind also an diese Marken gebunden und haben unterschiedliche Unterstützung für einige Aufgaben.
- Roboterkompatibilität – Einige Hersteller bieten keine Offline-Programmiersoftware an, was ein Problem darstellt, wenn Sie sich auf Herstellersoftware verlassen. Tipps zur Bewertung Ihres Roboters finden Sie in unserem Artikel:Funktioniert die Offline-Programmierung mit meinem Roboter?
- Verfügbarkeit des Robotermodells — Sie müssen sicherstellen, dass Ihr Robotermodell für die von Ihnen verwendete Offline-Programmiersoftware verfügbar ist. In unserer Roboterbibliothek finden Sie über 300 Modelle von über 30 Roboterherstellern.
- Expertise – Einige traditionelle Arten der Offline-Programmierung (z. B. in der Automobilindustrie) beinhalten komplexe Softwaretools, die nicht einfach zu bedienen sind. Software wie RoboDK hingegen macht es sehr einfach, Ihren Roboter offline zu programmieren. Infolgedessen benötigen Sie viel weniger Fachwissen als in der Vergangenheit.
Die meisten dieser Faktoren können durch die Auswahl der richtigen Offline-Programmiersoftware überwunden werden.
Die 10 wichtigsten Aufgaben für die Offline-Programmierung
Wir sehen oft Leute, die dieselben oder ähnliche Aufgaben mithilfe der Offline-Programmierung implementieren. Um Ihnen das Leben leichter zu machen, haben wir eine Liste der häufigsten Aufgaben zusammengestellt, zusammen mit einer Anleitung, wie Sie diese mit der Offline-Programmierung umsetzen können.
Auf unserer Beispielseite finden Sie interaktive Simulationen und Tutorials zur Programmierung dieser Aufgaben in RoboDK.
1. Roboterbearbeitung
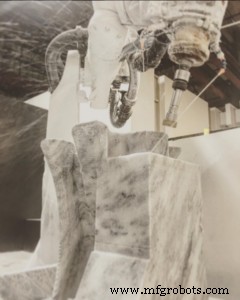
In der Vergangenheit wurde das automatisierte Fräsen und Bearbeiten eher mit CNC-Maschinen durchgeführt. Wenn Roboter im Spiel waren, wurden sie meist nur zur Maschinenbeschickung eingesetzt.
Heutzutage werden jedoch zunehmend Roboter für die eigentliche Bearbeitung eingesetzt. Höhere Genauigkeit von Industrierobotern und intuitivere Offline-Programmierung bedeuten, dass Sie CNC-Code einfach in Roboteranweisungen umwandeln können.
RoboDK enthält ein spezielles Roboterbearbeitungswerkzeug in seinem Dienstprogramme-Menü. Sehen Sie sich eine Demonstration unter diesem Link an:RoboDK Machining.
2. Pick-and-Place
Die vielleicht beliebteste Roboteraufgabe ist Pick and Place, bei der Objekte von einem Teil der Arbeitszelle zum anderen bewegt werden. Solche Aufgaben lassen sich sehr einfach mit der Offline-Programmierung programmieren. Wie ich in einem früheren Artikel demonstriert habe, ist es möglich, eine einfache Pick-and-Place-Aufgabe in weniger als 15 Minuten zu programmieren.
Siehe eine Demonstration unter diesem Link:RoboDK Pick and Place.
3. Robotermalerei
Wenn Sie irgendein Mitglied der Öffentlichkeit bitten würden, einige industrielle Roboteraufgaben zu nennen, würde ich wetten, dass Roboterlackierung ganz oben auf ihrer Liste stehen würde. Das Lackieren ist eine der typischsten Roboteranwendungen und lässt sich mit der Offline-Programmierung einfach durchführen. Die Software kann die Werkzeugwege innerhalb von Minuten generieren.

Siehe eine Demonstration unter diesem Link:RoboDK Painting.
4. Roboter-Punktschweißen
Offline-Programmierung wird seit langem verwendet, um Programme für das Punktschweißen zu erstellen. In der Vergangenheit erforderte dies jedoch viele Stunden mühsamer Simulation und einen spezialisierten Programmierer. Mit neuerer Software lassen sich Punktschweißprogramme einfach und fehlerfrei erstellen.
Siehe eine Demonstration unter diesem Link:RoboDK-Punktschweißen.
5. 3D-Druck
Ich würde sagen, dass der 3D-Druck eine der charakteristischen Technologien des 21. Jahrhunderts ist. Obwohl es sie schon seit einiger Zeit gibt, sind 3D-Druckanwendungen in den letzten zehn Jahren explodiert. Eine der interessantesten jüngsten Entwicklungen ist die Verwendung von Robotern selbst als 3D-Drucker. Offline-Programmierung macht dies sehr einfach zu erreichen.

RoboDK enthält ein dediziertes 3D-Druckwerkzeug im Menü „Dienstprogramme“. Sehen Sie sich eine Demonstration unter diesem Link an:RoboDK 3D Printing.
6. Kommissionierung vom Förderband
Förderanlagen werden in vielen Branchen eingesetzt, um Gegenstände zwischen verschiedenen Wertschöpfungsprozessen zu transportieren. Sie sind jedoch oft schwierig mit einem Roboter zu integrieren. Wenn Ihre Offline-Programmiersoftware sie unterstützt (wie es RoboDK tut), können Sie viel Zeit für die Online-Integration sparen.

Siehe eine Demonstration unter diesem Link:RoboDK Conveyor Picking.
7. Automatisierte Inspektion
Die Inspektion mittels Bildverarbeitung ist zu einer beliebten Anwendung für Roboter geworden. Die Gründe dafür liegen auf der Hand:Die manuelle Inspektion ist eine mühsame Aufgabe, die mit steigender Produktivität zunimmt. Die Offline-Programmierung der maschinellen Bildverarbeitung kann die Online-Programmierung nie vollständig ersetzen (da Sie die Kameras mit echten Bildern trainieren müssen), aber sie kann helfen, den Integrationsprozess zu beschleunigen.

Siehe eine Demonstration unter diesem Link:RoboDK Automated Inspection .
8. Zeichnung
Zeichnen mag für einen Roboter wie eine frivole Tätigkeit klingen. Es hat jedoch viele nützliche Anwendungen. Mit Robotern können Zuckergussmuster auf Torten gezeichnet, künstlerische Umrisse mit Fräswerkzeugen geschnitten und Produkte im Handschriftstil bemalt werden. Die Offline-Programmierung erleichtert die Konvertierung von SVG-Bildern (dem Standard für die Vektordarstellung) in Roboterpfade.
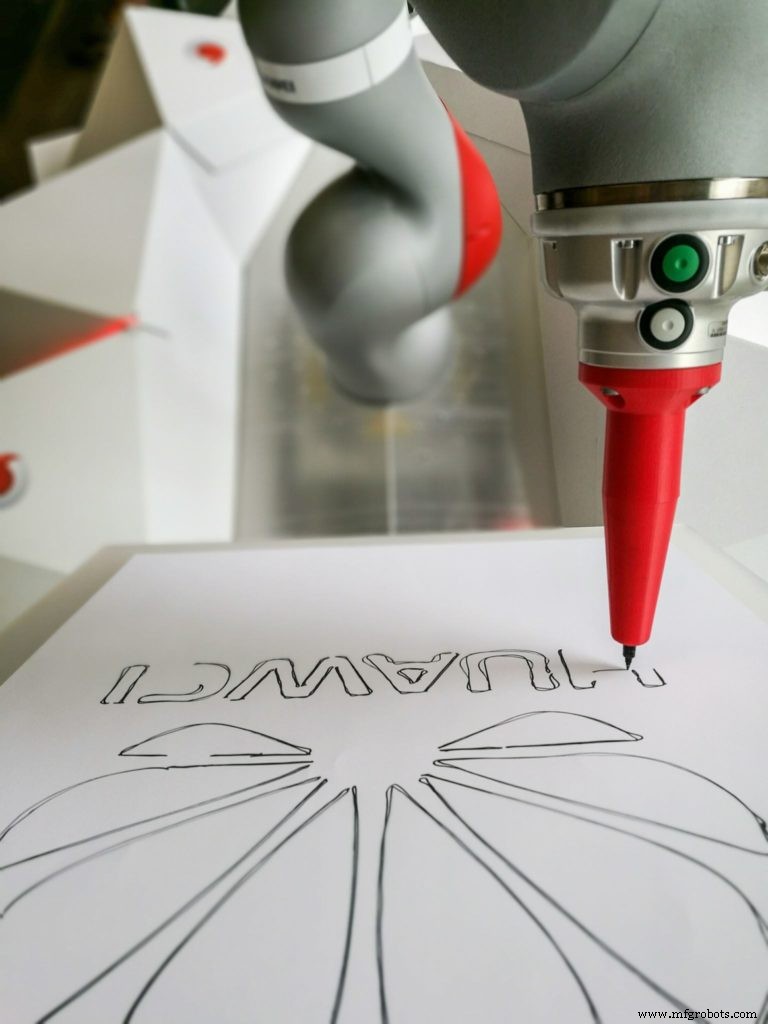
Siehe eine Demonstration unter diesem Link:RoboDK Drawing.
9. Integration einer externen Achse
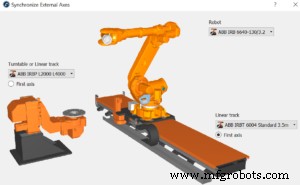
Dies ist nicht wirklich eine „Aufgabe“ an sich. Es ist eher eine Technik zur Verbesserung des Aufgabenspektrums, das Sie mit dem Roboter erledigen können. Mit externen Achsen können Sie den Arbeitsbereich des Roboters für Aufgaben wie Lackieren, Punktschweißen, Inspektion usw. erweitern. Sie sind im Grunde ein oder zwei zusätzliche Freiheitsgrade, die dem Roboter hinzugefügt werden. Das einzige Problem ist, dass sie mit dem Roboter synchronisiert werden müssen. Mit der Offline-Programmierung ist diese Synchronisation einfach.
RoboDK enthält ein dediziertes Synchronisierungstool für externe Achsen in seinem Dienstprogramme-Menü. Sehen Sie sich eine Demonstration unter diesem Link an:RoboDK Machining With External Axis.
10. Alles, was ein Roboter kann … OLP kann das auch
Auch wenn Ihre Aufgabe hier nicht aufgeführt ist, ist es wahrscheinlich, dass Sie sie mit Offline-Programmierung erreichen können. Wenn Sie sich nicht sicher sind, können Sie sich gerne an uns wenden und uns nach Ihrer speziellen Aufgabe fragen oder unten einen Kommentar hinterlassen.
Der beste Einstieg in die Offline-Programmierung ist, einfach die Software herunterzuladen und selbst auszuprobieren. Laden Sie eine kostenlose Testversion unter diesem Link herunter:RoboDK herunterladen.
Industrieroboter
- Die 7 wichtigsten Fertigungstrends für 2020
- Top 3 der stärksten Materialien für Kunststoffbefestigungen
- Top 7 Podcasts für IoT-Entwickler
- Top 10 Arbeitsabläufe für Hersteller
- Die Top 5 Vorteile von SaaS für Hersteller
- 7 Top-Bücher für Elektroniktechnik
- So wählen Sie ein Projekt für die Automatisierung aus
- Top-Tipps zum Schweißen von Aluminium
- CNC-Programmierung für CNC-Maschinisten
- Hauptgründe für Hydrauliksystemausfälle