


Wie viele Achsen benötigt Ihr Roboterpositionierer?
Sie haben entschieden, dass Sie einen Roboterpositionierer benötigen … aber wie viele Achsen benötigen Sie?
Es gibt so viele Positionierermodelle mit so vielen verschiedenen Stilen. Einige haben 1 einfache Achse, aber andere haben viele!
Noch verwirrender ist die Bandbreite an Konfigurationen, die Positionierer haben können. Achsen können vertikal, horizontal und in jedem beliebigen Winkel dazwischen montiert werden.
Die Auswahl eines Positionierers mit zu vielen oder zu wenigen Achsen könnte eine Verschwendung von Budget bedeuten; Aber wie viele sind zu viele!?
Wenn Sie einen Roboterpositionierer in Betracht ziehen, haben Sie sich wahrscheinlich bereits mehrere verschiedene Modelle angesehen. Sie haben wahrscheinlich einachsige Drehtische, zweiachsige Positionierer und mehrachsige Riesenräder gesehen. Sie haben wahrscheinlich verschiedene Marken, Stile und Preisklassen erkundet.
Wenn Sie ehrlich sind, haben Sie jetzt wahrscheinlich ein wenig die Nase voll von Positionsgebern.
Das Problem mit Positionierern ist, dass es nicht einfach nur darum geht, zu sagen „Ich kaufe diesen hier“ und es dabei zu belassen. Der von Ihnen gewählte Positionierer beeinflusst, wie einfach es ist, Ihre Roboterzelle zu integrieren und zu programmieren. Sie möchten nicht den falschen auswählen und es sich schwerer als nötig machen, den Roboter einzusetzen und zu programmieren.
Wenn Sie beispielsweise einen 5-Achsen-Positionierer mit einem 6-Achsen-Roboter erhalten, müssen Sie 11 Achsen steuern! Wenn es notwendig ist, so viele Achsen zu haben, in Ordnung. Aber wenn es nicht notwendig ist, können Sie Ihren Kauf bereuen.
Warum „Wie viele Achsen?“ Ist eine verwirrende Frage
Die Frage, wie viele Achsen Ihr Mechanismus benötigt, ist eine sehr natürliche Frage. Es ist jedoch schwierig, diese Frage zufriedenstellend zu beantworten.
Wenn wir nur von Industrierobotern sprechen, lautet eine häufige Antwort, dass 6-Achs-Roboter erforderlich sind. Das stimmt nicht immer, aber meistens. Der Grund dafür ist, dass 6 Achsen benötigt werden, um Punkte im Arbeitsbereich des Roboters aus jeder Position und Ausrichtung zu erreichen.
Wie wir in unserem Euler-Winkel-Primer erklärt haben, wird die Position des Endeffektors eines Roboters mit 6 Parametern gesteuert:3 Translationsparameter (X, Y und Z) und 3 Rotationsparameter (Rot[X], Rot[Y] und Rot [Z]).
Wenn Ihr Roboter weniger als 6 Achsen hat, schränken Sie die Flexibilität des Roboters ein. Das macht bei manchen Robotern Sinn – z.B. Palettierroboter, die Objekte nur von oben anfahren müssen. Im Allgemeinen sind 6-Achs-Industrieroboter jedoch für eine Vielzahl von Aufgaben am nützlichsten.
Jenseits der 6-Achsen wird Ihr Mechanismus jedoch „überflüssig“.
Beispielsweise können 7-Achsen-Roboter die gleichen Punkte in ihrem Arbeitsbereich erreichen wie ein 6-DoF-Roboter. Die Steuerung eines redundanten Mechanismus wird jedoch komplizierter. Daher möchten Sie keine zusätzlichen Freiheitsgrade hinzufügen, wenn sie nicht benötigt werden.
Das Hinzufügen eines Positionierers bedeutet, dem Roboter mehr DoF hinzuzufügen. Dies kann zu einem redundanten System führen oder auch nicht.
Ob Sie zusätzliche Freiheitsgrade benötigen, hängt von den spezifischen Anforderungen Ihrer Aufgabe ab.
7 Schritte zur Ermittlung der für Ihre Anwendung benötigten Achsenanzahl
Um herauszufinden, wie viele Achsen Sie benötigen, sehen Sie sich die Anforderungen Ihrer Anwendung genauer an.
Hier ist ein Prozess, den Sie verwenden können, um einige potenzielle Positionierer zu identifizieren, die für Sie arbeiten könnten. Es ermöglicht Ihnen, einige potenzielle Modelle zu vergrößern und sie richtig zu bewerten. Wenn keine dieser Optionen geeignet ist, können Sie wieder herauszoomen und die Informationen verwenden, die Sie gelernt haben, um einen besseren Positioner auszuwählen.
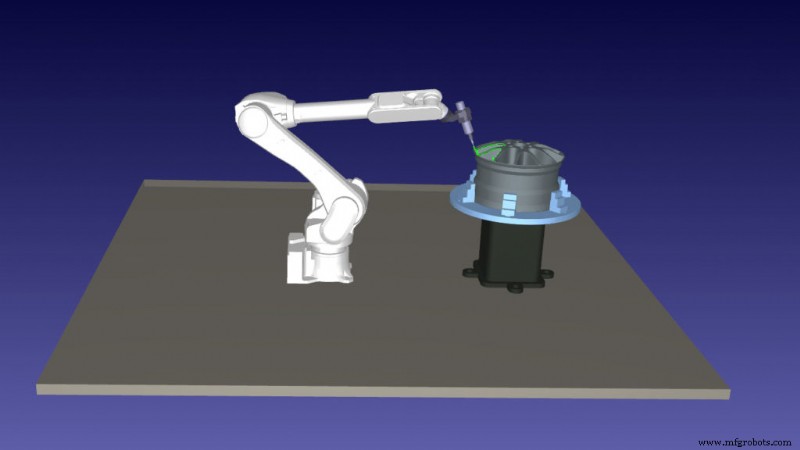
- Schauen Sie sich die Anforderungen Ihrer Aufgabe an und konzentrieren Sie sich insbesondere auf den benötigten Arbeitsbereich. Eine gute Möglichkeit, dies zu tun, besteht darin, Ihre Anwendung in einem Robotersimulator zu erstellen.
- Beachten Sie, welche Aspekte der Aufgabe nicht möglich sind, wenn nur der Roboter verwendet wird. Welche Teile des Arbeitsbereichs sind nicht erreichbar? Welche Bewegungen sind unmöglich?
- Machen Sie anhand dieser Informationen eine fundierte Vermutung zu einem oder zwei Arten von Stellungsreglern, die Ihren Anforderungen entsprechen könnten. Denken Sie daran, die Nutzlast zu berücksichtigen, die zum Halten Ihrer Werkstücke erforderlich ist.
- Finden Sie einige Positionierer auf dem Markt, die Ihre Kriterien erfüllen könnten, und testen Sie sie in Ihrer Simulation. Stellen Sie sicher, dass Sie für jeden Positionierer, den Sie ausprobieren, Ihr Setup als neues Projekt speichern, da Sie später zu einem der Projekte zurückkehren werden.
- Wenn eines der Modelle perfekt funktioniert, großartig! Testen Sie trotzdem einige Optionen, um zu sehen, welche Eigenschaften wirklich erforderlich sind. Denken Sie daran, dass Sie am Ende nicht mehr DoF haben möchten, als Sie benötigen.
- Wenn keines der Modelle für Ihre Anwendung geeignet ist, verwenden Sie die gesammelten Informationen, um Ihre Anforderungen zu verfeinern.
- Gehen Sie zurück zum Markt und suchen Sie nach einem oder zwei Modellen, die diese neuen Anforderungen erfüllen. Testen Sie es erneut in Ihrer Simulation, bevor Sie Ihre Wahl treffen.
Durch die Verwendung eines solchen Prozesses entfällt ein Teil des Rätselratens bei der Identifizierung der richtigen Anzahl von Achsen. Mit jedem Test in Ihrer Simulation erfahren Sie ein bisschen mehr darüber, was Sie wirklich von einem Positionierer brauchen, um Ihre Aufgabe zu erfüllen.
Triff eine Wahl und arbeite damit
Sobald Sie sich auf ein Modell konzentriert haben, das für Ihre Aufgabe geeignet ist, können Sie fortfahren und die Anwendung im Simulator gründlicher entwickeln.

Öffnen Sie Ihr gespeichertes Projekt mit dem von Ihnen gewählten Positionierer und verfeinern Sie es zur vollständigen Anwendung. Auf diese Weise können Sie alle Aspekte der Aufgabe testen und die Anwendung für eine einfache Integration vorbereiten.
Wenn Sie Ihren Positionierer gekauft haben, müssen Sie sich keine Gedanken darüber machen, ob mehr Achsen für die Aufgabe von Vorteil gewesen wären oder nicht. Roboter sind sehr flexibel und es gibt normalerweise mehrere Möglichkeiten, die gleichen Aktionen mit einem einzigen Roboter auszuführen.
Wenn Sie beim Einsatz des Roboters auf Probleme stoßen, können Sie mit Ihrer Ausrüstung mit ziemlicher Sicherheit eine Lösung finden. Dies ist der Wert von Kaufentscheidungen mit einem Simulator als Testbench.
Welche Art von Positionierern haben Sie in Betracht gezogen? Erzählen Sie es uns in den Kommentaren unten oder beteiligen Sie sich an der Diskussion auf LinkedIn, Twitter, Facebook, Instagram oder im RoboDK-Forum.
Industrieroboter
- Wie erreicht ein Roboter volle Autonomie?
- Wie genau muss Ihr Asset-Tracking-System sein?
- Wie viele versteckte Schichten und versteckte Knoten benötigt ein neuronales Netzwerk?
- Whitepaper:So finden Sie Ihr Roboterpotenzial
- So integrieren Sie Robotik erfolgreich in Ihre Einrichtung
- Wie viel kostet Roboterautomatisierung?
- Virtual Solutions Center:Wie hilft Robotersimulation bei der Roboterintegration?
- Wie liefert Robotermaschinen tendenziell ROI im Laufe der Zeit?
- Woher weiß ich, dass es an der Zeit ist, einen Roboter zu kaufen?
- Wie viel PS braucht eine Hydraulikpumpe?