


4D-Bildgebungsradar-Chipsätze verbessern die Objektidentifikation
Radar wird heiß, insbesondere mit Fortschritten, die eine Objektidentifikation/-klassifizierung und eine höhere Breitengradauflösung versprechen – etwas, das herkömmliche Radare nicht können. Mit diesen neuen Innovationen entwickeln sich Radare zu den gefragtesten Sensoren bei Automobilherstellern und Tier Ones, die hochautomatisierte Fahrzeuge entwickeln.
Radarsystemlösung (Quelle:NXP)
Als Reaktion auf die hohen Erwartungen der Automobilindustrie hat NXP Semiconductors angekündigt, eine Reihe neuer Radarsensor-Chipsätze zu testen, die aus dem S32R45-Radarprozessor des Unternehmens und neuen 77-GHz-Transceivern namens TEF82xx bestehen.
NXP, das mit seinem ersten Radarchip namens „Dolphin“ vor fünf Jahren Pionierarbeit bei HF-CMOS-Radaren leistete, ist ein führender Anbieter von Radarlösungen für die Automobilindustrie.
Die 4D-Bildsensoren von NXP können nicht nur Entfernung und Geschwindigkeit messen, sondern auch „Höhe, Richtung und Ankunftswinkel, während sie Objekte mit einer viel höheren Auflösung identifizieren“, erklärte Torsten Lehmann, Executive Vice President und General Manager für Hochfrequenzverarbeitung, während ein Interview mit EE Times . Mit einem 4D-Bildradar, das nicht nur die horizontalen, sondern auch die vertikalen Ebenen erfassen kann, kann ein Fahrzeug beispielsweise bestimmen, ob es „unter“ oder „über“ ein Objekt fahren soll, sagte Lehman.
„Stellen Sie sich eine Szene vor, in der ein Fahrzeug mit 80 Stundenkilometern auf einer Autobahn fährt, während ein Motorrad – ein kleines Objekt mit geringem Reflexionsvermögen – mit 200 Stundenkilometern von hinten kommt“, sagte er. Im Gegensatz zu Kameras und Lidars können diese neuen verbesserten Radare das Motorrad zunächst weit auseinander erkennen und erkennen, dass sich diese beiden Objekte mit zwei unterschiedlichen Geschwindigkeiten bewegen, erklärte Lehmann.

(Quelle:NXP)
Bisher war Radar der einzige Sensor, der eine Reichweite von über 300 Metern hat und Objekte mit hoher Geschwindigkeit erkennt. Weder Kameras noch Lidars können so viel Entfernung und Geschwindigkeit bewältigen.
Mit dem Aufkommen von bildgebenden Radargeräten mit höherer Auflösung sind viele Radaranbieter, einschließlich NXP, bestrebt, Radare als den einzigen Hochgeschwindigkeitssensor zu etablieren, der unter den schlechtesten Wetter- und Lichtverhältnissen funktionieren kann.
Skalierbarkeit
NXP ist kaum allein, wenn es um 4D-Bildgebungsradar geht. Continental gab im vergangenen September bekannt, dass es Xilinx-FPGAs verwendet, um das erste serienreife 4D-Bildgebungsradar der Automobilindustrie einzusetzen, das 2021 in Pkw ausgeliefert werden soll.
Angesichts der Erfahrung von NXP in der Massenproduktion mit 77-GHz-HF-CMOS-Transceivern und seines S32R45-Radarprozessors behauptet NXP, dass sein 4D-Bildgebungsradar-Chipsatz die Kosten und die Energieeffizienz im Vergleich zur Allzweck-FPGA-Implementierung erheblich senken kann. NXP verzichtete jedoch darauf, den Grad der Kosten-/Leistungsreduzierung anzugeben.
Phil Magney, Gründer und Präsident von VSI Labs, sagte uns:„Wir verfolgen diesen Bereich seit einigen Jahren genau. Ironischerweise hörte ich das erste Mal vor einigen Jahren von einer NXP-Präsentation davon. Damals wurde es als potenzieller Konkurrent von Lidar präsentiert, da die neuen Radare eine Punktwolke erzeugen könnten.“
Offensichtlich plant NXP schon seit einiger Zeit den Start seines 4D-Bildgebungsradars.
Aber die Tonhöhe von NXP ändert sich. Anstatt nur seine Fähigkeit, Punktwolken zu erzeugen, hochzuhalten, hat sich der Schwerpunkt des Unternehmens auf die Skalierbarkeit verlagert, die eine Reihe seiner neuen Radarlösungen bietet.
NXP wirbt jetzt für „eine gemeinsame Plattform, die sich über verschiedene Anwendungsfälle hinweg skalieren lässt“, von Eckradar und Langstrecken-Frontradar bis hin zu bildgebendem Radar. Dies ist wichtig für eine Branche, die nach Technologien sucht, um die Anforderungen des New Car Assessment Program (NCAP) zu erfüllen, die eine bessere Leistung im toten Winkel und automatische Notbremsfunktionen erfordern. Während NCAP keine bevorzugten Sensortechnologien spezifiziert, suchen Automobilhersteller – gezwungen, die NCAP-Anforderungen zu erfüllen – nach besseren Radartechnologien, die Objekte in Ecken und vorne erkennen können, erklärte Lehmann.
Klicken für Bild in voller Größe
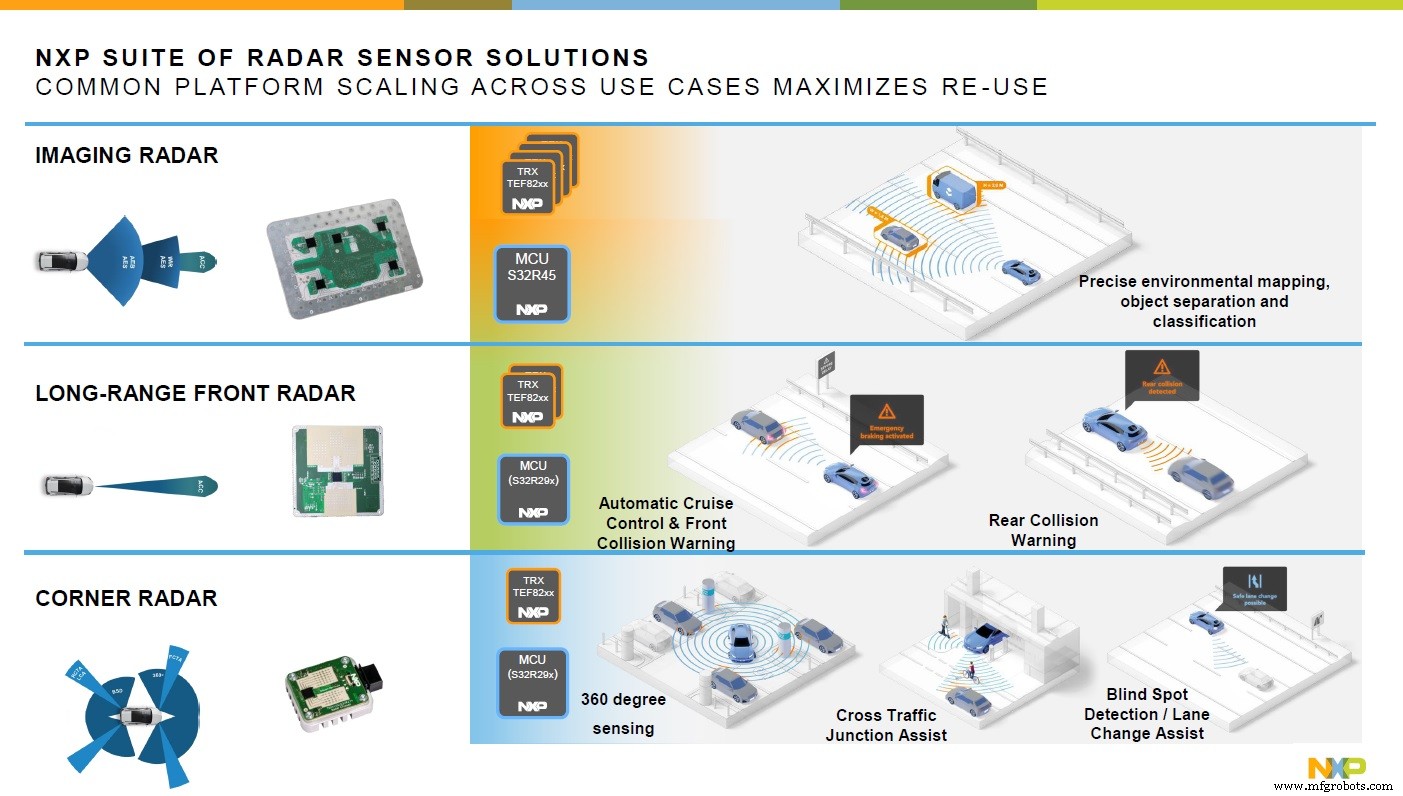
(Quelle:NXP)
Für die Totwinkelerkennung und den Spurassistenten in Fahrzeugen der Stufen 1 und 2 funktioniert eine Kombination aus dem einzelnen TEF82xx-Transceiver und dem S32R45-Radarprozessor von NXP. Das Hinzufügen einer automatischen Geschwindigkeitsregelung und einer Front- und Heckkollisionswarnung zu L2- und L3-Fahrzeugen würde zwei Transceiver anstelle von einem erfordern. Für die Objekttrennung und -klassifizierung, die von autonomen L4- und L5-Fahrzeugen gefordert werden, können OEMs vier kaskadierende Transceiver mit einem Radarprozessor kombinieren.
Der Schlüssel besteht darin, dass während des Übergangs zu einer höheren Automatisierung Autohersteller, die verschiedene Marken und Modelle ansprechen müssen, in der Lage sein sollten, eine einzige Plattform zu verwenden, die für die Wiederverwendung von Software und Hardware entwickelt wurde.
Umstellung auf 4D-Bildgebungsradar
Die Entwicklung von Automobilradaren wird jedoch durch Marketing-Jargon durcheinander gebracht.
Herkömmliche Radare – manchmal auch 2D genannt – wurden zu bildgebenden Radaren. „Bildgebendes Radar erzeugt im Wesentlichen ein Array, bei dem die Dichte der Messungen dramatisch zunimmt“, erklärt Magney. „Herkömmliches 2D-Radar ist im Vergleich grob und erzeugt nur einen einzigen Punkt pro Objekt. Aber ein bildgebendes Radar würde viele Punkte liefern, um besser zu verstehen, was verfolgt wird.“ Zusammenfassend stellte er fest:„Bildgebendes Radar erzeugt eine vertikale Auflösung, wobei herkömmliches Radar von einer einzigen Ebene aus funktioniert.“
Wie unterscheiden sich 3D- und 4D-Bildgebungsradare?
„Ich denke, die Zeit wird in der vierten Dimension genutzt. Ich habe dies auch von einigen anderen Unternehmen gehört und sie verwenden es so“, sagte Magney. Aber er fügte hinzu:„Ehrlich gesagt ist 4D mehr Marketing-Hype als alles andere, weil das Zeitelement von Doppler abgeleitet wird. Wenn dies der Fall wäre, könnte traditionelles 2D als 3D bezeichnet werden.“
Mit anderen Worten, das Zeitelement war schon immer entscheidend für das, was Radare bieten. Die gleiche Frage gestellt, stellte Lehman von NXP fest, dass das vierte Element des 4D-Bildsensors die „laterale Auflösung“ ist. 4D-Bildgebungsradar erfasst die Umgebung besser und stellt fest, ob ein Fahrzeug unter oder über einem Objekt fliegen kann.
Breitengradauflösung
„Höhere Breitengradauflösung“ bedeutet eine größere vertikale Auflösung, bemerkte Magney. „Dies an sich ist eines der wichtigeren Merkmale.“
Diese Diskussion erinnert an den Fall Joshua Brown. Browns Tesla Model S-Limousine tötete den Fahrer, als er im Mai 2016 auf dem US-Highway 27A in Florida mit einem Sattelschlepper kollidierte riesiges Rigg und fuhr direkt hinein.

Das Foto zeigt die rechte Seite des Aufliegers. Bereich im roten Oval markiert Kollisionsschäden von Joshua Browns Tesla S. (Quelle:National Transportation Safety Board)
Hätte ein 4D-Bildsensor einen so tödlichen Unfall verhindern können? Magney sagte:„Ja, diese Art von Radar wäre nicht anfällig für Fehlalarme von herkömmlichen Radaren. Und es hätte den Tesla-Unfall nicht zugelassen.“
Leistungsstärkere Transceiver und Radarverarbeitung
Der neue TEF82xx von NXP – 75 mm x 75 mm – basiert auf seinem RFCMOS der zweiten Generation basierend auf der 40-nm-Prozesstechnologie. Das Unternehmen behauptet, dass es die HF-Leistung für eine verbesserte Wahrnehmung im Vergleich zur Vorgängerversion verdoppeln kann.
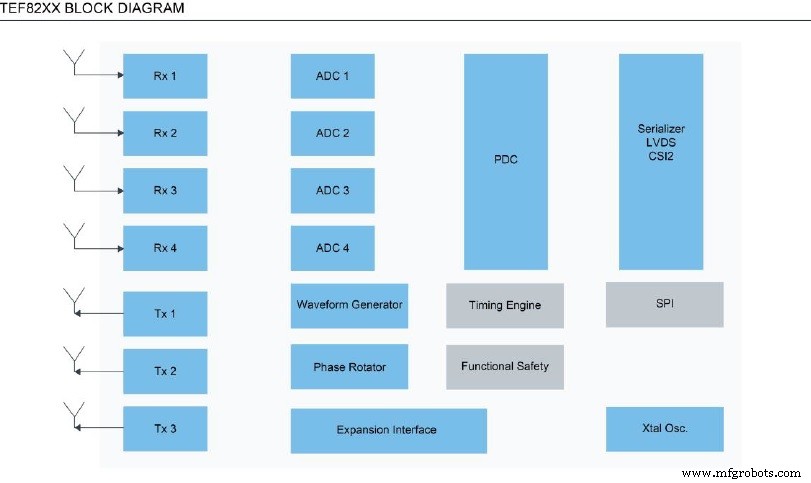
Der neue Transceiver-Chip bietet auch eine 4-fache Reduzierung des Phasenrauschens um das Ziel herum, wodurch eine bessere Objekttrennung ermöglicht wird. Es kommt mit einem 6-Bit-Phasenrotator für Beam-Steering-Anwendungen und erweiterter MIMO-Unterstützung für Modulation.
Das neue S32R45-Radar von NXP basiert auf einem 16-nm-FinFET-Prozess. Es bietet bis zu 4-fache Kaskaden-Transceiver-Unterstützung für „präzise Umgebungskartierung und verbessertes Szenenverständnis“ in L4- und L5-Fahrzeugen, behauptete das Unternehmen.
Klicken für Bild in voller Größe
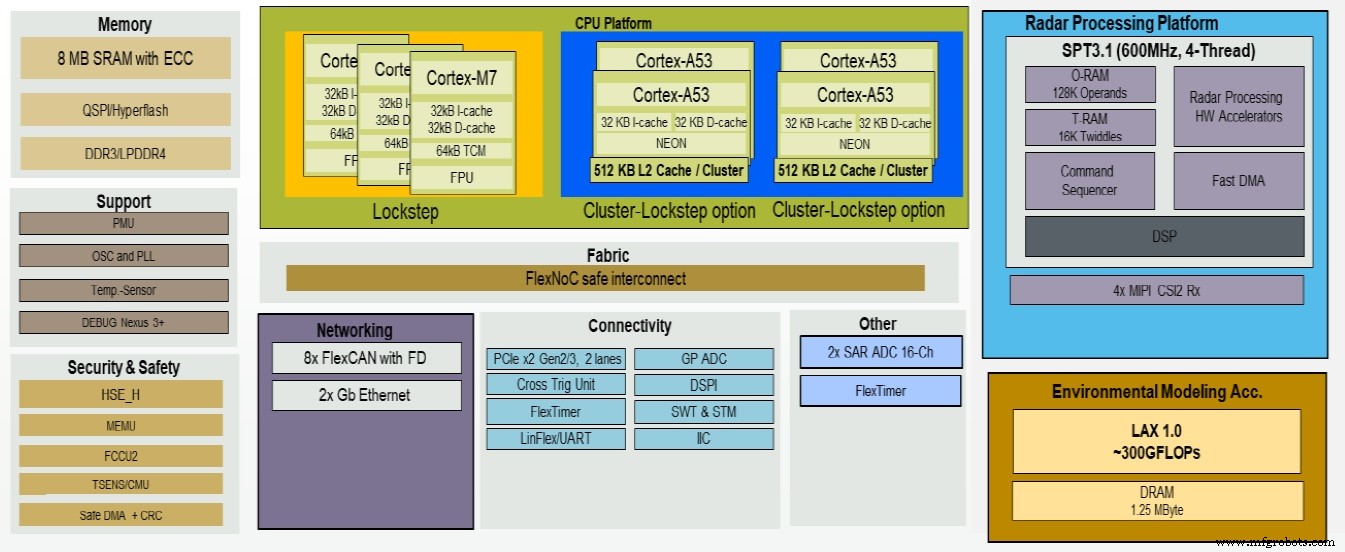
S32R45-Blockdiagramm. (Quelle:NXP)
Es ist wichtig zu beachten, dass S32R45 zu neuartigen Radarbeschleunigungen in der Lage ist. Genauer gesagt bietet es laut NXP einen neuen „linearen Algebra-Radarbeschleuniger“, der eine bis zu 64-fache Leistung im Vergleich zu einem ARM-A53-Kern bietet. Dies bedeutet, dass „Super-Resolution Direction of Arrival (DoA)-Algorithmen und ein echter MIMO-Betrieb auch bei widrigen Wetterbedingungen ausgeführt werden“, behauptete NXP.
Erneuerte Debatte:Lidar vs. Radar
NXP behauptet, dass sein neues 4D-Bildgebungsradar eine Winkelauflösung von weniger als 1 Grad bietet. Aber wie ist es im Vergleich zu Lidar?
Lehman bemerkte:„Wenn Sie von einem leistungsstarken Lidar sprechen – wie einem mechanisch rotierenden Lidar, das von Waymo verwendet wird, kann es sehr granulare Punktwolken erzeugen, da es eine Winkelauflösung von weniger als 0,1 ° oder 0,5 ° bietet.“ Er fügte hinzu, aber ein solches Lidar ist „sperrig und kostet Tausende von Dollar“.
Magney bemerkte:„Es gibt ein Gerücht, dass Tesla ein Imaging-Radar für die Modell-3-Plattform in Betracht zieht, und dies wäre ein guter Schritt, da es eine bessere Antwort darauf bietet, Lidar nicht zu verwenden.“ Der Teardown von System Plus Consulting hat ergeben, dass Tesla das 2D-Radar von Continental verwendet hat, wie von EE Times reported berichtet .
Tesla ist laut Magney jedoch von Continental auf Bosch umgestiegen, um mehr Reichweite zu erzielen. Er erklärte, dass es sich bei beiden um 2D-Radare mit den Einschränkungen herkömmlicher Radare handelt. „Meiner Meinung nach wäre eine Umstellung auf bildgebendes Radar von Tesla klug. Verstehen Sie, dass bildgebendes Radar eine Punktwolke erzeugt. Obwohl es eine geringere Auflösung als Lidar hat, ist es [noch] eine enorme Verbesserung gegenüber dem herkömmlichen Radar“, sagte Magney.
Zusammenfassend betonte Magney jedoch:„Ich bin noch nicht dabei, Lidar unter den Bus zu werfen.“
Seiner Meinung nach hat Lidar jetzt einen großen Vorteil gegenüber Radar, auch wenn diese Lücke mit den neuen Radaren geschlossen werden könnte. „Eine der wichtigsten Anwendungen für Lidar ist die relative Lokalisierung anhand einer Basiskarte. Dies ist für urbane Robotaxis und Shuttles von entscheidender Bedeutung und ich glaube nicht, dass Sie Lidar für diese Aufgabe ersetzen können.“
Magney schloss:„Lidar wird nicht verschwinden, selbst wenn 4D-Radar auftaucht. Anstatt Lidar zu ersetzen, könnte man sagen, dass die neuen Radare einige der Einschränkungen herkömmlicher Radare überwinden.“
Verfügbarkeit
Der neue Radar-Chipsatz von NXP, der heute bemustert wird, wird 2021 in Serie gehen. Eckradar, Frontradar und 4D-Bildradar werden 2021 über mehrere Monate auf den Markt kommen, aber alle drei werden in der zweiten Hälfte verfügbar sein, sagte Lehman. Er lehnte es ab, sich zu den Preisen zu äußern.
>> Dieser Artikel wurde ursprünglich veröffentlicht am unsere Schwesterseite EE Times.
Eingebettet
- C#-Klasse und -Objekt
- Java-Singleton-Klasse
- Apacer stellt neue industrielle Produktidentifikation vor
- Mikrochip:PolarFire FPGA-basierte Lösung ermöglicht 4K-Video- und Bildbearbeitung in kleinstem Formfaktor
- Kymati entwickelt kundenspezifische Radarlösungen
- Debüts des bildgebenden Radarprozessors für die Automobilindustrie mit 30 fps
- Low-Power-Radarchip verwendet neuronale Spiking-Netzwerke
- Manhattan Skyline:kompakte ARM COM mit NXP i.MX 8MM
- congatec:neues SMARC-Modul mit NXP i.MX 8M Mini-Prozessor
- Kit bietet mmWave-Entwicklungsplattform